VesselSDF: 血管ネットワーク再構築のための距離場事前情報
VesselSDF uses a new "distance field" approach to perfectly map blood vessels from sparse CT scans, overcoming past limitations.
背景と学術的系譜
起源と学術的系譜
医療画像データ、特にCTスキャンの疎なスライスから血管ネットワークを正確に再構築する問題は、臨床診断および手術計画において長年にわたり基本的な課題であった。この問題は、コンピュータ断層撮影(CT)のような医療画像技術が、冠動脈疾患から腫瘍評価に至るまで、さまざまな病状の診断に不可欠となるにつれて、最初に浮上し、その重要性を増した。これらの複雑な樹状構造をセグメンテーションするための初期のアプローチは、伝統的な画像処理技術に依存することが多かった。しかし、手術ナビゲーション、血流動力学解析、異常の早期検出のために血管のより正確な3Dモデルへの需要が高まるにつれて、これらの手法の限界が明らかになった。深層学習の登場は、医療画像セグメンテーションに大きな進歩をもたらしたが、それでもこれらの洗練されたモデルでさえ、血管ネットワーク特有の特性に苦労していた。
著者らがVesselSDFを開発するに至った根本的な「ペインポイント」は、過去のアプローチの3つの重要な限界に起因する。
- ギザギザした表面アーチファクト: 従来のバイナリボクセル分類手法は、血管を離散的な3D立方体として表現する。この離散的な性質は、再構築された血管においてギザギザした、ブロック状の表面につながることが多く、特に表面積対体積比が高い細い血管では問題となる。この滑らかさの欠如は、臨床応用においてモデルの精度を低下させる。
- 異方性歪みと断片化: 医療用CTスキャンは、各スライス内(面内、$\Delta x, \Delta y$)の解像度が、スライス間(スライス厚、$\Delta z$)の間隔よりもはるかに高いことが多い。この顕著な違いは異方性歪みを生み出し、特に分岐点や急激に進路を変える場所で、血管が断片化または切断されているように見える原因となる。
- SDFにおける浮遊アーチファクト: 符号付き距離場(SDF)は連続的な表面を表現する有望な方法を提供するが、既存のSDFベースの手法自体がしばしば「浮遊アーチファクト」を生成する。これは、再構築において現れるが実際の血管構造に対応しない、小さく切断された表面断片であり、3Dモデル全体の品質と信頼性を低下させる。
直感的なドメイン用語
- 符号付き距離場 (Signed Distance Field, SDF): ある都市の3Dマップがあり、都市内のすべての点が最も近い川からどれだけ離れているかを知りたいと想像してください。SDFは血管に関するそのマップのようなものです。空間内の任意の点に対して、血管表面までの最短距離を示します。点が血管内にある場合、距離は負になり、外側にある場合は正になり、表面に正確にある場合は距離はゼロになります。この連続的な表現は、滑らかな形状を捉えるのに役立ちます。
- バイナリボクセル分類 (Binary Voxel Classification): 3D画像を小さなレゴブロック(ボクセル)で構成されていると想像してください。バイナリボクセル分類は、個々のレゴブロックのそれぞれについて、それが血管の一部であるか(赤く塗る)、血管の一部でないか(透明のままにする)を決定することに似ています。これは、各小さな立方体に対する単純な「はい」または「いいえ」の決定であり、ブロック状または断片化された結果につながる可能性があります。
- 疎なCTスキャン(Sparse CT Scan Slices): 幹や枝の非常に薄く、広く離れた断面をいくつか見るだけで、複雑な木の完全な3D形状を理解しようとしていると想像してください。疎なCTスキャンも同様です。体の一部を限定された「スライス」で取得し、それらの間に大きなギャップがあります。これらの数少ない、遠く離れたスライスから連続的な構造(血管など)を再構築することは、大きな課題です。
- 構造的連続性 / 幾何学的忠実性 (Structural Continuity / Geometric Fidelity): これは、再構築された血管が自然で途切れのない流れと正確な形状をどの程度維持しているかを指します。血管が連続的な管であるべき場合、「構造的連続性」とは、ギャップや断裂がないことを意味します。「幾何学的忠実性」とは、その曲線、分岐、および直径が、ギザギザ、歪み、または単純化されたものではなく、実際の血管に正確に一致することを意味します。
- 浮遊アーチファクト (Floating Artifacts): 詳細な彫刻を彫ろうとしている彫刻家が、メインの彫刻の周りに意図しない小さな石の破片を浮かせたままにしてしまう様子を想像してください。3D血管再構築において、浮遊アーチファクトは、最終モデルに現れるが実際の血管ネットワークに属さない、小さく切断された幾何学的断片です。これらは、再構築の品質とリアリズムを低下させる偽の要素です。
表記表
| 表記 | 説明 |
|---|---|
| $V$ | 入力体積CTスキャン |
| $D, H, W$ | CTスキャンの次元(深度、高さ、幅) |
| $\mathbf{x}$ | $\mathbb{R}^3$における3D空間座標 |
| $f_{SDF}(\mathbf{x}; \theta_r)$ | $\mathbf{x}$における予測符号付き距離場(SDF)、$\theta_r$でパラメータ化 |
| $S$ | $f_{SDF}$のゼロレベルセットとして定義される血管表面 |
| $f_o(\mathbf{x}; \theta_o)$ | $\mathbf{x}$における予測バイナリ占有確率、$\theta_o$でパラメータ化 |
| $f^*_{SDF}(\mathbf{x})$ | $\mathbf{x}$におけるグラウンドトゥルース SDF |
| $y$ | $\mathbf{x}$における占有のグラウンドトゥルースバイナリラベル(血管の場合は1、背景の場合は0) |
| $\mathcal{L}$ | 総損失関数 |
| $\mathcal{L}_{sdf}$ | SDF監督損失(L1ノルム) |
| $\mathcal{L}_{occ}$ | 占有監督損失(バイナリクロスエントロピー) |
| $\mathcal{L}_{eik}$ | アイコナール正則化損失 |
| $\mathcal{L}_{gauss}$ | 距離重み付きガウス正則化損失 |
| $\mathcal{L}_{sur}$ | 表面正則化損失 |
| $\lambda_s, \lambda_o, \lambda_e, \lambda_g, \lambda_r$ | 各損失項の重み |
| $\partial_x, \partial_y, \partial_z$ | x, y, z座標に対する偏微分 |
| $\gamma$ | アイコナール損失におけるz次元勾配の異方性スケーリング係数 |
| $G_\sigma(\cdot)$ | 標準偏差$\sigma$を持つ3Dガウスぼかし演算子 |
| $\beta$ | 表面正則化のハイパーパラメータ |
| $\Omega$ | 3Dトレーニングボリューム |
| $\theta_o$ | バイナリ占有U-Netのパラメータ |
| $\theta_r$ | SDFリファイナーU-Netのパラメータ |
| $g_e, h_e$ | アテンションゲート内のゲーティングおよびスキップ接続特徴マップ |
| $a_e$ | アテンション重み |
| $\mathcal{A}(\cdot)$ | 学習済みアテンション関数 |
| $W_g, W_h$ | アテンションゲートの学習可能な重み行列 |
問題定義と制約
中核問題の定式化とジレンマ
本論文で取り上げられる中核問題は、疎な医療画像データ、特にCTスキャンからの複雑な血管ネットワークの正確かつ堅牢な3D再構築である。
提案されたVesselSDFフレームワークの出発点(入力/現在の状態)は、体積CTスキャン $V \in \mathbb{R}^{D \times H \times W}$ であり、ここで $D$ は軸方向スライスの数、$H, W$ は面内次元を表す。この入力データは、特に画像面間におけるその固有の疎性によって特徴付けられ、放射線線量低減や時間的制約などの要因により、面内解像度の低さからしばしば苦しむ。
望ましい終点(出力/目標状態)は、連続的な符号付き距離場(SDF) $f_{SDF}(\mathbf{x}; \theta_r)$ であり、これはそのゼロレベルセットとして血管表面を暗黙的に定義する:$S := \{\mathbf{x} \in \mathbb{R}^3 \mid f_{SDF}(\mathbf{x}; \theta_r) = 0\}$。このSDFは、高画質の再構築血管を生成できるようにするべきであり、それは血流血管の滑らかで管状の幾何学的構造、その複雑な分岐パターンを正確に捉え、構造的連続性と幾何学的忠実性を維持する。最終的な目標は、臨床現場により信頼性の高い血管分析を提供することである。
VesselSDFが橋渡ししようと試みる正確な欠落リンクまたは数学的ギャップは、真に正確でトポロジー的に一貫した連続血管表面を達成するために、離散的なボクセルベースの表現および欠陥のある連続SDF手法を超えて移動することにある。従来のバイナリボクセル分類アプローチは、基礎的ではあるが、本質的にギザギザした表面アーチファクトを生成し、特に細い血管では顕著である。さらに、CTスキャンにおける面内解像度($\Delta x, \Delta y$)とスライス厚($\Delta z$)の間の顕著な異方性は、特に重要な分岐点や急激に進路を変える場所で、血管構造の断片化を引き起こす。符号付き距離場は連続表面表現の有望な方向を提供するが、既存のSDFベースの手法は頻繁に望ましくない「浮遊アーチファクト」を生成する。これは、再構築品質を著しく低下させる切断された表面断片である。本論文は、血管セグメンテーションを連続SDF回帰問題として再定式化し、血管幾何学と接続性を本質的に捉える連続表現を学習することにより、これらの限界に直接対処する。
この分野の研究者を歴史的に閉じ込めてきた痛みを伴うトレードオフまたはジレンマは、特に細い樹状構造において、細かな血管の接続性を維持することと、正確な境界を維持することとの間の根本的な緊張である。一方の側面を改善すると、しばしば他方が犠牲になる。例えば、連続性を確保するための積極的な平滑化は、過度の平滑化と細部の喪失につながる可能性があり、一方、正確な境界に焦点を当てると、断片化または切断された血管セグメントにつながる可能性がある。しばしばバイナリボクセル分類に基づいた過去の深層学習アプローチは、このジレンマに苦しみ、構造的整合性を欠くか、特定のトレーニングデータを超えて一般化できず、代わりに一般的な幾何学的原理を学習するのではなく構成を記憶するモデルにつながる。
制約と失敗モード
正確な血管ネットワーク再構築の問題は、研究者が遭遇するいくつかの厳しい現実的な壁により、非常に困難である。
-
物理的/幾何学的制約:
- 細く分岐した構造: 血管は複雑な分岐パターンと様々な直径を持ち、しばしば非常に細い。疎なデータからこれらの繊細な樹状構造を正確に再構築することは、大きな課題である。
- 複雑なトポロジー: 多数の分岐と曲がりくねった経路を持つ血管ネットワークの複雑なトポロジーは、特に血管が分岐したり急激に進路を変えたりする領域で、構造的整合性を維持し断片化を防ぐことを困難にする。
- 異方性解像度: CTスキャンにおける面内解像度とスライス厚の間の実質的な違いは、異方性歪みを生み出す。これは血管構造の不連続性と断片化につながり、特に分岐点では、滑らかで連続的な表面の再構築を困難にする。
-
計算上の制約:
- データの疎性: 主な入力である疎なCTスキャンは、画像面間に固有の疎性をもたらす。この限定的な面内解像度は、臨床現場での放射線線量低減やリアルタイム遅延要件を満たすための努力の直接的な結果であるが、3D再構築に利用可能な情報を著しく制限する。
- 高解像度における計算複雑性: 疎な2Dスライスから高解像度の3D再構築を達成するには、通常、指数関数的に多くの計算リソースが必要となり、モデルの複雑性と推論速度に実用的な限界をもたらす。
-
データ駆動型制約:
- 注釈付きデータの希少性: 高品質な医療画像データセット、特に細い血管構造の詳細な注釈を持つものは、固有の希少性がある。このデータ不足は、モデルが堅牢で一般的な幾何学的原理を学習するのではなく、特定の血管構成を記憶することにつながることが多い。
- 高い被験者間変動: 血管の解剖学的構造は被験者間で大きな変動を示すため、限定的なデータセットでトレーニングされたモデルが異なる患者や解剖学的変動にわたって効果的に一般化することは困難である。
VesselSDFが克服を目指す過去のアプローチの失敗モードには以下が含まれる。
* ギザギザした表面アーチファクト: ボクセルベースの表現の離散的な性質は、必然的に階段状またはギザギザした表面につながり、特に表面積対体積比が高い細い血管で顕著である。
* 断片化および切断された血管: データ疎性と異方性解像度のために、過去の手法はしばしば断片化されたり、解剖学的にありえない再構築を生成したりし、血管が切断されているか不完全に見える。細い血管は頻繁に検出されないか、断片化される。
* 浮遊アーチファクト: 連続表現を提供する有望な方法である既存のSDFベースの手法でさえ、しばしば偽の「浮遊」アーチファクトを生成する。これは、実際の血管ネットワークの一部ではない切断された表面断片であり、全体的な再構築品質を低下させる。
* 一般化の欠如: モデルは、普遍的な幾何学的事前知識を学習するのではなく、限定的なトレーニングデータから特定のパターンを記憶する傾向があり、未知のデータや異なる血管構成でのパフォーマンスが低下する。
なぜこのアプローチなのか
選択の必然性
VesselSDFによって具現化された連続符号付き距離場(SDF)回帰アプローチの採用は、血管ネットワーク再構築における伝統的な手法の固有の限界を考慮すると、単なる改善ではなく、必要なパラダイムシフトであった。著者らは、特にバイナリボクセル分類(例:標準的なU-Netバリアント)に基づいた既存の深層学習アプローチの重大な欠点を詳細に説明することにより、この認識の正確な瞬間を特定している。
これらの伝統的な手法は、いくつかの理由で根本的に不十分であることが判明した。
- 離散表現アーチファクト: バイナリボクセルベースの表現は、その性質上、ギザギザした階段状の表面を生成する。これは、表面積対体積比が高い、細く複雑な血管構造にとって特に問題であり、幾何学的忠実性の重大な喪失と解剖学的にありえない再構築につながる。
- 異方性歪みと断片化: 医療画像データ、特に疎なCTスキャンは、面内解像度($\Delta x, \Delta y$)とスライス厚($\Delta z$)の間に実質的な違いを示すことが多い。離散的な手法はこれらのギャップを埋めるのに苦労し、特に重要な分岐点での異方性歪みと血管構造の断片化につながる。これにより、不連続性が発生し、重要な幾何学的特徴が失われる。
- 構造的整合性と一般化の欠如: 既存の深層学習モデルは強力ではあるが、複雑な血管トポロジーにおける構造的整合性を維持することにしばしば失敗する。それらは、限定的なトレーニングデータから特定の血管構成を記憶する傾向があり、未知のデータで断片化または切断された血管を生成しやすい。
- ナイーブなSDFにおける浮遊アーチファクト: SDFは有望な連続表現を提供するが、既存のSDFベースの手法でさえ「浮遊アーチファクト」を生成する可能性がある。これは、再構築品質を低下させる切断された表面断片である。これは、SDFへの単純な切り替えだけでは十分ではなく、より堅牢でアーチファクトを認識したアプローチが必要であることを意味した。
SDFの連続的な性質は、表面を滑らかに表現し、一貫した空間関係を捉えることを本質的に行うため、離散表現では単純に解決できないこれらの根深い問題を克服するための唯一の実行可能な解決策として浮上した。疎なデータから繊細で分岐した構造の滑らかで連続的でトポロジー的に整合性の取れた再構築を要求する問題の要求は、連続的な幾何学的回帰フレームワークへの移行を必然的なものにした。
比較優位性
VesselSDFは、主にその構造設計と新しい正則化技術を通じて、単純なパフォーマンスメトリックをはるかに超える定性的な優位性を示している。その利点は、SDFの固有の特性を活用しながら、その一般的な欠点を細心の注意を払って対処する方法に由来する。
- 固有の滑らかさと幾何学的忠実性: 離散的なボクセル表現とは異なり、SDFは本質的に滑らかで連続的な表面をエンコードする。VesselSDFは、血管セグメンテーションを連続的なSDF回帰問題として再定式化することにより、これを活用する。これにより、血管の滑らかで管状の幾何学的構造と複雑な分岐パターンを本質的に捉えることができ、幾何学的忠実性と構造的整合性に優れた再構築が得られる。
- 適応的なノイズ処理と詳細保持: 主要な構造的利点は、新しい距離重み付きガウス正則化器(式8)である。このメカニズムは平滑化を適応的に強制する。血管表面から離れた領域($|f_{SDF}(\mathbf{x})|$が大きい場合、ノイズがより蔓延している場合)では積極的にSDFをぼかし、平滑化し、高次元ノイズを効果的に処理する。重要なことに、表面境界近く($|f_{SDF}(\mathbf{x})| \approx 0$の場合)の細かな血管の詳細を同時に保持し、重要な解剖学的特徴の過度の平滑化を防ぐ。これは、均一な正則化を適用する手法よりも大幅な定性的進歩である。
- 幾何学的事前情報による一般化の向上: 問題を離散分類ではなく連続幾何学的回帰として定式化することにより、VesselSDFは特定のパターンを記憶するのではなく、より普遍的な根本的な形状原理を学習する。距離重み付き正則化は、特定のパターンを記憶するのではなく、血管の連続性に関連する一般的な幾何学的事前情報をエンコードすることにより、これをさらに強化する。これにより、モデルは異なる血管構成や解剖学的変動にわたって知識をより効果的に転送できる。
- 堅牢なアーチファクト除去: 適応的ガウス正則化器と表面正則化項(式9)の組み合わせは、浮遊セグメントのような一般的なSDFアーチファクトを排除するための堅牢なメカニズムを提供する。表面正則化は、実際の表面の強い証拠なしに、ほぼゼロのSDF値を特に罰し、再構築品質を低下させる偽のまたは弱い境界を効果的に抑制する。
- 分離された2段階リファインメント: 初期バイナリ占有予測と後続のSDFリファインメントを分離する2段階アーキテクチャは、構造的な利点である。初期U-Netは信頼できる開始点を提供し、第2段階である追加の3D U-Netは、幾何学的正則化によってガイドされる、正しくスケーリングされたSDFへのリファインメントにのみ焦点を当てる。この分離により、各段階が特定タスクを最適化でき、より堅牢で正確な最終再構築につながる。
制約との整合性
VesselSDFの設計は、疎なCTデータからの血管ネットワーク再構築の厳しい要件に完全に適合し、問題と解決策の「結婚」を形成する。
- 制約:疎なCTスキャンと不連続性: 問題は、面内解像度が限定され、不連続性につながることを特徴とする。
- 整合性: VesselSDFの連続SDF表現は、疎なスライス間を本質的に補間する。各点を最近傍血管表面までの符号付き距離で表現することにより、ギャップを橋渡しする滑らかで連続的な表面を作成し、疎性に起因する断片化を克服する。SDF表現は「距離場プロパティを通じて隣接する予測を本質的に結合する」(p.5)ため、スライス間の一貫性を保証する。
- 制約:細く分岐した血管とギザギザしたアーチファクト: 繊細な樹状構造は、離散ボクセルではギザギザになりやすい。
- 整合性: 滑らかで管状の幾何学構造は、連続SDFによって自然に捉えられる。これにより、ボクセルベースの手法に固有のギザギザしたアーチファクトが排除され、細い血管や複雑な分岐パターンのより正確で解剖学的にありうる表現が得られる。
- 制約:構造的連続性と幾何学的忠実性の維持: 血管が接続され、幾何学的に正確であることを保証することが最重要である。
- 整合性: アイコナール正則化(式7)は、勾配の大きさがほぼ1であることを強制することにより、滑らかな距離遷移を促進し、幾何学的アーチファクトにつながる可能性のある大きな偏差を防ぐ。さらに、距離重み付きガウス正則化器は、全体的な滑らかさを維持しながら、血管表面近くの正確な幾何学を保証し、連続性と忠実性の両方に直接対処する。
- 制約:トレーニングデータを超えた一般化: 注釈付きデータの希少性は、モデルが特定のパターンを記憶することにつながる。
- 整合性: 連続幾何学的回帰としてタスクを再定式化することにより、VesselSDFは特定のボクセルパターンではなく、根本的な形状原理を学習する。距離重み付き正則化は、血管の連続性に関連する普遍的な幾何学的事前情報をエンコードすることにより、これをさらに強化し、モデルが異なる血管構成や解剖学的変動にわたって一般化する能力を向上させる。
- 制約:浮遊アーチファクトの除去: 既存のSDF手法でさえ一般的な問題である。
- 整合性: 適応的ガウス正則化器と表面正則化項(式9)は、この問題に対処するために特別に設計されている。ガウス正則化器は血管表面から離れた領域で滑らかさを保証し、表面正則化は偽の、切断された血管成分を形成する可能性のある弱い、ノイズの多い境界を抑制する。
代替案の却下
本論文は、主に離散ボクセル分類手法の限界と、SDFベースの手法における堅牢な正則化の必要性に焦点を当て、伝統的および一部の現代的なアプローチを却下する理由を明確に述べている。
標準的なCNN(例:3D U-Net [5]、3D SA-UNet [8])のような一般的なアプローチに対する主な批判は、連続的で滑らかな表面を表現する能力と、異方性データを効果的に処理する能力の固有の欠如である。述べられているように、「バイナリボクセル分類に基づいた既存の深層学習アプローチは、構造的連続性と幾何学的忠実性にしばしば苦労する。」(要旨)。具体的には、これらの手法は:
- ギザギザした表面アーチファクトを生成する: ボクセルの離散的な性質は、必然的に「ギザギザした表面アーチファクトを生成し、これは表面積対体積比が高い細い血管で特に顕著である。」(p.4)。
- 異方性歪みに悩まされる: 画像面間($\Delta x, \Delta y$ vs $\Delta z$)の解像度の実質的な違いは、「血管構造を断片化する異方性歪みを引き起こし、特に分岐点では。」(p.4)。
- 構造的整合性に苦労する: それらはしばしば「断片化されたり、解剖学的にありえない再構築を生成したりする」(p.2)ため、血管ネットワークの繊細な接続性を維持することに失敗する。
本論文は、他の暗黙的ニューラル表現やSDFベースの手法(例:[1, 3, 11, 21])の出現を認識しているが、VesselSDFの独自の貢献を強調することにより、それらの不十分さを示唆している。著者らは、「既存のSDFベースの手法はしばしば浮遊アーチファクト、すなわち再構築品質を低下させる切断された表面断片を生成する。」(p.4)と述べている。これは、VesselSDFの特定の適応的ガウス正則化および表面正則化技術なしでは、他のSDFアプローチでさえ、挑戦的な血管データに必要なレベルの堅牢性とアーチファクト抑制を提供できないことを示唆している。本論文は、生成敵対ネットワーク(GAN)や拡散モデルのような他の一般的な深層学習パラダイムの特定の失敗については、この特定のタスクについては詳しく述べていないが、離散表現に対する一般的な批判は、ボクセルベースの出力を利用する多くのそのような手法に広く適用される。
数学的・論理的メカニズム
マスター方程式
VesselSDFフレームワークの中心には、2つの段階にわたる学習プロセスを調整する包括的な損失関数がある。このマスター方程式は、著者らがトレーニング中に最小化することを目指すものであり、直接的な教師あり学習目標といくつかの幾何学的正則化項をエレガントに組み合わせている。これは、滑らかで連続的でトポロジー的に正確な血管ネットワークの再構築を駆動する中心的な数学的エンジンである。
総損失 $\mathcal{L}$ は次のように定義される。
$$ \mathcal{L} = \lambda_s \mathcal{L}_{sdf} + \lambda_o \mathcal{L}_{occ} + \lambda_e \mathcal{L}_{eik} + \lambda_g \mathcal{L}_{gauss} + \lambda_r \mathcal{L}_{sur} $$
この方程式は、5つの異なる損失成分の重み付き合計であり、それぞれが予測符号付き距離場(SDF)の形成と最終的な血管再構築の品質保証において重要な役割を果たしている。
項ごとの解剖
マスター方程式の各成分を分解して、その個々の貢献と、それが含まれる理由を理解しよう。
-
$\mathcal{L}$ (総損失): これは、VesselSDFモデルが最小化しようとする全体的な目的関数である。その値は、モデルの予測がグラウンドトゥルースとどの程度一致し、課せられた幾何学的制約を満たしているかを反映する。最適化プロセスの目標は、可能な限り低い $\mathcal{L}$ をもたらすモデルパラメータを見つけることである。
-
$\lambda_s, \lambda_o, \lambda_e, \lambda_g, \lambda_r$ (損失重み): これらはスカラーハイパーパラメータであり、各個別の損失項の相対的な重要性を決定する。例えば、著者らは実験で $\lambda_s = 0.1$, $\lambda_o = 0.01$, $\lambda_e = 0.01$, $\lambda_g = 0.1$, および $\lambda_r = 0.1$ を設定した。これらの重みを調整することにより、直接的な監督と幾何学的正則化の間のバランスを微調整し、他の側面よりも特定の再構築の側面を強調することができる。ここでの加算の選択は、マルチタスク学習設定で複数の目的を組み合わせるための標準的なものであり、各項が全体的な勾配に独立して貢献することを可能にする。
-
$\mathcal{L}_{sdf}$ (SDF監督損失):
$$ \mathcal{L}_{sdf} = E_{x \in \Omega} |f_{SDF}(x) - f^*_{SDF}(x)| $$- 数学的定義: この項は、3D空間座標 $x$ における予測符号付き距離場 $f_{SDF}(x)$ と、対応するグラウンドトゥルース SDF $f^*_{SDF}(x)$ との間のL1絶対差を計算する。期待値 $E_{x \in \Omega}$ は、この差が3Dトレーニングボリューム $\Omega$ 内のすべてのサンプリング点 $x$ にわたって平均されることを意味する。
- 物理的/論理的役割: これは、SDFリファインメント段階の直接的な監督項である。モデルに真の符号付き距離値を学習するように強制し、予測された表面($f_{SDF}(x) = 0$ の場合)がグラウンドトゥルース血管境界に正確に一致することを保証する。L1ノルム(絶対差)は、外れ値に対処する場合や、堅牢な誤差ペナルティが必要な場合に、L2(二乗差)よりも回帰タスクで好まれることが多い。これは、誤差に対するスパース性を促進する。
- なぜL1か?: L1ノルムは誤差に対して線形ペナルティを提供し、誤差を二乗するL2ノルムと比較して外れ値に対してより堅牢である。これは、大きな偏差の影響を大きく受ける可能性があるため、モデルが過度に影響を受けるのを防ぐのに役立つ。
-
$\mathcal{L}_{occ}$ (占有監督損失):
$$ \mathcal{L}_{occ} = -E_{x \in \Omega} [y \log(f_o(x)) + (1 - y) \log(1 - f_o(x))] $$- 数学的定義: これはバイナリクロスエントロピー損失である。ここでは、$y \in \{0, 1\}$ は点 $x$ のバイナリグラウンドトゥルースラベル(血管の場合は1、背景の場合は0)であり、$f_o(x)$ は点 $x$ が血管に属する予測占有確率である。
- 物理的/論理的役割: この項は、ネットワークの最初の段階であるバイナリ占有予測器を監督する。モデルに各ボクセルを血管に属するかどうかを正しく分類するように促す。この損失を最小化することにより、モデルは血管ボクセルに対して高い確率、背景ボクセルに対して低い確率を出力するように学習する。
- なぜバイナリクロスエントロピーか?: BCEはバイナリ分類問題の標準的な損失関数である。これは、予測された確率分布と真のバイナリ分布との間の不一致を効果的に測定し、モデルの予測を正しいラベルに向かって押し出す。
-
$\mathcal{L}_{eik}$ (アイコナール正則化損失):
$$ \mathcal{L}_{eik} = E_{x \in \Omega} [(\partial_x f_{SDF}(x))^2 + (\partial_y f_{SDF}(x))^2 + (\gamma \partial_z f_{SDF}(x))^2 - 1]^2 $$- 数学的定義: この項は、真のSDFの勾配 magnitude がほとんどどこでも1であると述べる理想的なアイコナール方程式からの逸脱を罰する。予測されたSDFの勾配 magnitude の二乗と1との二乗差を計算する。$\partial_x, \partial_y, \partial_z$ は、x, y, z座標に対する偏微分を表す。$\gamma = \frac{\Delta x}{\Delta z}$ は、面内(x, y)次元と比較して軸方向(z)次元に沿ったボクセル間隔の潜在的な違いを考慮した異方性スケーリング係数である。
- 物理的/論理的役割: これは重要な幾何学的正則化項である。予測された $f_{SDF}(x)$ が、表面から離れるにつれて距離が一様に変化する真の距離関数のように振る舞うことを強制する。これにより、SDFが過度に急になったり平坦になったりするのを防ぎ、滑らかな距離遷移を保証し、幾何学的アーチファクト(「崩壊した」または「膨張した」表面など)を防ぐ。異方性スケーリング $\gamma$ は、医療画像における一般的な非一様なボクセル解像度の問題を処理するための巧妙な工夫である。
- なぜ1からの二乗差か?: 真の符号付き距離関数の基本的な特性は、その勾配 magnitude が1であることである。1からの二乗差を罰することにより、損失はモデルにこの特性を学習するように促し、SDFを幾何学的に一貫したものにする。
-
$\mathcal{L}_{gauss}$ (距離重み付きガウス正則化損失):
$$ \mathcal{L}_{gauss} = E_{x \in \Omega} |f_{SDF}(x)| \cdot ||f_{SDF}(x) - G_\sigma(f_{SDF}(x))||_2^2 $$- 数学的定義: この項は、距離重み付き平滑化制約を適用する。予測されたSDF $f_{SDF}(x)$ とそのガウスぼかしバージョン $G_\sigma(f_{SDF}(x))$(ここで、$G_\sigma$ は標準偏差 $\sigma$ を持つ3Dガウスぼかし演算子)との差の二乗L2ノルムを計算する。この差は、予測されたSDFの絶対値 $|f_{SDF}(x)|$ によって重み付けされる。
- 物理的/論理的役割: これは、特に血管表面から離れた領域($|f_{SDF}(x)|$ が大きい場合)の高周波ノイズと浮遊アーチファクトを低減するように設計された適応的平滑化項である。重み係数 $|f_{SDF}(x)|$ は、平滑化効果が血管表面から離れているほど($|f_{SDF}(x)|$ が大きい場合)強く、表面に近いほど($|f_{SDF}(x)| \approx 0$ の場合)弱くなることを意味する。これにより、モデルは重要な細かな血管の詳細を平滑化しすぎるのを防ぎながら、グローバルな滑らかさを達成できる。
- なぜ距離重み付きガウスぼかしか?: ガウスぼかしは平滑化のための標準的な画像処理技術である。距離重み付けがここでの重要な革新である。これにより、適応的な平滑化が可能になる。これがなければ、グローバルな平滑化項は重要な細かな血管構造をぼかしてしまう可能性がある。平滑化の強さを表面までの距離に依存させることにより、著者らは最も重要な詳細が保持されることを保証する。
-
$\mathcal{L}_{sur}$ (表面正則化損失):
$$ \mathcal{L}_{sur} = E_{x \in \Omega} \exp(-\beta |f_{SDF}(x)|) $$- 数学的定義: この項は、ハイパーパラメータ $\beta > 0$ で重み付けされた、負の絶対予測SDFの指数関数の使用。
- 物理的/論理的役割: この項は、偽のまたは「浮遊」した血管成分を抑制するために特別に設計されている。これは、実際の表面の強い証拠なしにゼロに近いSDF値を予測することに強く罰する。より大きな $\beta$ はこのペナルティをより積極的にし、弱い、ノイズの多い境界をゼロレベルセットから効果的に押し出し、再構築をクリーンアップする。
- なぜ指数関数か?: 指数関数 $\exp(-z)$ は $z$ が増加するにつれて急速に減少する。$z = \beta |f_{SDF}(x)|$ の場合、これは、損失が $|f_{SDF}(x)|$ が小さい(すなわち、表面に近い)場合に非常に高く、$|f_{SDF}(x)|$ が増加するにつれて急速に低下することを意味する。これは、モデルが曖昧な表面近くの予測を避けるように強く「反発」させる効果を生み出し、それらを確実な表面にするか、遠ざけるように促す。
ステップバイステップの流れ
単一の抽象的な3D空間座標 $x$ が、トレーニング中にVesselSDFパイプラインを通過する様子を想像してみましょう。それは洗練された組立ラインを移動する小さな粒子のようなものです。
-
初期入力: 私たちの粒子 $x$ は、生の体積CTスキャン $V$ 内の座標として旅を開始する。システムは、CTスキャンにおける $x$ の周りの局所的な画像特徴にもアクセスできる。
-
ステージ1:占有予測(「ラフスケッチ」フェーズ):
- 座標 $x$(またはむしろ、その周りのCTスキャンから抽出された特徴)は、まずバイナリ占有予測のための3D U-Net、$f_o(\cdot; \theta_o)$ に入力される。
- このU-Net内では、入力特徴はエンコーダー・デコーダー構造を通じて処理される。さまざまなレベルで、3Dアテンションゲート(式2で説明されている)がインテリジェントフィルターのように機能する。それらは、受信した特徴マップ $g_e$ と $h_e$ を分析し、アテンション重み $a_e$ を生成する。これらの重みはスキップ接続特徴を調整し、ネットワークが顕著な血管領域に計算努力を集中し、失われる可能性のある細部を保持することを保証する。
- このU-Netを通過した後、私たちの粒子 $x$ は占有確率 $f_o(x)$ を割り当てられる。この値は通常0から1の間であり、ネットワークの初期の「推測」を表す。すなわち、$x$ が血管(例:$f_o(x) \approx 1$)または背景(例:$f_o(x) \approx 0$)に属するかどうかである。これは、血管のラフなバイナリスケッチを得るようなものである。
-
ステージ2:SDFリファインメント(「精密彫刻」フェーズ):
- ステージ1からの占有確率 $f_o(x)$ は、次にSDFリファイナーネットワーク $f_r(\cdot; \theta_r)$ に渡される。重要なことに、この段階からの勾配は、最初の段階のパラメータから「分離」されている(
detach(fo(x;θo)))。これは、SDFリファイナーが占有予測を固定入力として使用し、その独自の幾何学的制約が初期セグメンテーションタスクに干渉するのを防ぐことを意味する。 - 別の3D U-NetであるSDFリファイナーは、この占有情報を取り込み、多解像度処理を通じて、それを連続符号付き距離値 $f_{SDF}(x)$ に変換する。この値はもはや確率ではなく実数である。$x$ が血管内にある場合は負、外側にある場合は正、理想的には血管表面にある場合はゼロである。ここで、ラフスケッチが正確で連続的な幾何学的表現に変換される。
- ステージ1からの占有確率 $f_o(x)$ は、次にSDFリファイナーネットワーク $f_r(\cdot; \theta_r)$ に渡される。重要なことに、この段階からの勾配は、最初の段階のパラメータから「分離」されている(
-
損失計算(「品質管理」フェーズ):
- 次に、$f_o(x)$ と $f_{SDF}(x)$ の両方が、それぞれのグラウンドトゥルース値(占有の場合は $y$、SDFの場合は $f^*_{SDF}(x)$)と比較される。
- $\mathcal{L}_{occ}$ 項は、$f_o(x)$ が真のバイナリラベル $y$ とどの程度一致するかをチェックする。
- $\mathcal{L}_{sdf}$ 項は、$f_{SDF}(x)$ と真のSDF $f^*_{SDF}(x)$ との間の絶対差を測定する。
- $\mathcal{L}_{eik}$ 項は、$f_{SDF}(x)$ の勾配を精査し、それが1に近いことを確認し、それによって $f_{SDF}(x)$ が適切な距離場として振る舞うことを検証する。
- $\mathcal{L}_{gauss}$ 項は、$f_{SDF}(x)$ に距離重み付き平滑化チェックを適用し、表面近くの重要な詳細を保持しながら、遠方の領域が滑らかであることを保証する。
- 最後に、$\mathcal{L}_{sur}$ 項は、潜在的な浮遊アーチファクトをクリーンアップするために、弱い、曖昧なゼロに近いSDF値を罰する。
- これらの個々のチェックはすべて、総損失 $\mathcal{L}$ に組み込まれ、私たちの粒子 $x$ に対するモデルのパフォーマンスの単一の指標を提供する。
-
パラメータ更新(「学習」フェーズ):
- 総損失 $\mathcal{L}$ に基づいて、勾配が計算され、オプティマイザー(この場合はAdam)によって両方のU-Netのパラメータ($\theta_o$ と $\theta_r$)を調整するために使用される。この反復的な調整は、多くの粒子とエポックにわたって繰り返され、システム全体が学習して予測を改善できるようになる。
-
最終出力(「再構築された血管」):
- トレーニング後、推論のために、システムは新しいCTスキャンデータを取り込み、任意の点 $x$ に対して、予測された $f_{SDF}(x)$ を出力する。血管表面は、次に $f_{SDF}(x) = 0$ となるすべての点の集合として定義される。このゼロレベルセットは、マーチングキューブアルゴリズムを使用して3Dメッシュに変換でき、最終的な高画質の再構築血管が得られる。
最適化ダイナミクス
VesselSDFモデルは、Adamオプティマイザーを使用して総損失関数 $\mathcal{L}$ を反復的に最小化することにより、学習および収束する。このプロセスは、マスター方程式のさまざまな項によってガイドされる、勾配と損失ランドスケープの形成の洗練された相互作用を伴う。
-
勾配の挙動:
- 各トレーニングイテレーション中に、Adamオプティマイザーは、総損失 $\mathcal{L}$ の勾配を、学習可能なすべてのパラメータ(占有U-Netの $\theta_o$ およびSDFリファイナーU-Netの $\theta_r$)に対して計算する。
- 式3の
detach操作は、勾配フローの重要な側面である。これは、SDF固有の損失項($\mathcal{L}_{sdf}$, $\mathcal{L}_{eik}$, $\mathcal{L}_{gauss}$, $\mathcal{L}_{sur}$)からの勾配が、初期占有予測ネットワークのパラメータ $\theta_o$ を更新するために伝播しないことを保証する。この設計上の選択は、初期セグメンテーションタスクを分離し、SDFのより複雑な幾何学的制約によって妨げられることなく、安定した信頼性の高い開始点を提供できるようにする。$\mathcal{L}_{occ}$ 項のみが $\theta_o$ の更新に貢献する。 - 逆に、すべての5つの損失項が $\theta_r$、すなわちSDFリファイナーのパラメータの更新に貢献する。これは、SDFリファイナーが、初期占有予測の上に構築しながら、グラウンドトゥルースSDFに一致し、アイコナール特性を強制し、遠方領域を平滑化し、浮遊アーチファクトを抑制することを同時に学習することを意味する。分離された勾流を伴う共同トレーニングにより、モデルはまず堅牢な占有マップを確立し、次にそれを細心の注意を払って高品質で連続的なSDFにリファインし、正確でトポロジー的に整合性の取れた血管再構築につながる。学習率 $5 \times 10^{-4}$ はAdamの一般的な選択であり、速度と安定性の間の良好なバランスを提供する。
-
損失ランドスケープの形成: マスター方程式の各項は、特定の点で多次元損失ランドスケープを形成し、最適化を望ましい解に導く。
- $\mathcal{L}_{sdf}$ (L1損失): この項は、グラウンドトゥルースSDF値を中心に、損失ランドスケープに「V字型」の谷を作成する。線形ペナルティは一貫した勾配 magnitude(正確な最小値を除く)を保証し、オプティマイザーが真のSDF値に効率的に移動するのを助ける。外れ値に対する堅牢性は、時折ノイズの多いグラウンドトゥルースラベルが極端に急な勾配でランドスケープを大幅に歪めないことを意味する。
- $\mathcal{L}_{occ}$ (バイナリクロスエントロピー): 占有ネットワークの場合、この項は誤分類を強く罰するランドスケープを形成する。これは、予測確率を背景の場合は0に、血管の場合は1に押し出す急な斜面を作成し、モデルが明確で自信のあるバイナリ決定を下すことが「エネルギー的に有利」になるようにする。
- $\mathcal{L}_{eik}$ (アイコナール正則化): これは強力な幾何学的制約である。勾配 magnitude が1に近い予測を支持するランドスケープを作成し、理想的なSDF多様体に沿って「溝」を形成する。この単位勾配からの逸脱は急なペナルティをもたらし、モデルの予測を真の距離関数の特性に適合するように効果的に「押し出す」。これにより、SDFが不自然に崩壊または膨張するのを防ぐ。
- $\mathcal{L}_{gauss}$ (距離重み付きガウス正則化): この項は、損失ランドスケープに適応的な平滑化効果を導入する。血管表面から離れた領域($|f_{SDF}(x)|$ が大きい場合)では、この項はより滑らかで平坦なランドスケープを作成し、モデルが高周波ノイズを低減するように促す。しかし、血管表面近く($|f_{SDF}(x)| \approx 0$ の場合)では、その影響は軽減され、ランドスケープが鋭い特徴(細かな血管の詳細に対応)を保持できるようになる。これは、グローバルな滑らかさとローカルな精度とのバランスを取る巧妙な方法である。
- $\mathcal{L}_{sur}$ (表面正則化): この項の指数関数的な性質は、損失ランドスケープの $f_{SDF}(x) = 0$ 周辺に非常に急な「崖」を作成する。モデルが弱い、サポートされていない表面(すなわち、$f_{SDF}(x)$ がゼロに近いが強く確認されていない場合)を予測すると、この項は強い勾配を生成し、$f_{SDF}(x)$ をゼロから押し出す。これにより、曖昧な表面近くの予測を効果的に「消去」し、偽の浮遊アーチファクトを抑制する。
-
反復的な状態更新と収束:
- Adamオプティマイザーは、各パラメータのアダプティブ学習率を使用して、この複雑な損失ランドスケープを効率的にナビゲートする。勾配の第1モーメントと第2モーメントの推定値を使用して各パラメータのステップサイズを調整し、関連する方向での収束を速め、ノイズの多いまたは平坦な領域での更新を遅くする。
- 100エポックにわたって、モデルは反復的にパラメータを更新する。当初、予測はラフである可能性があるが、トレーニングが進むにつれて、教師あり項の組み合わせた影響により予測はグラウンドトゥルースに向かって引き寄せられ、正則化項は幾何学を洗練し、滑らかさ、適切な距離場特性、およびアーチファクトの抑制を保証する。分離された勾流を伴う共同トレーニングにより、モデルはまず堅牢な占有マップを確立し、次にそれを細心の注意を払って高品質で連続的なSDFにリファインし、正確でトポロジー的に整合性の取れた血管再構築につながる。
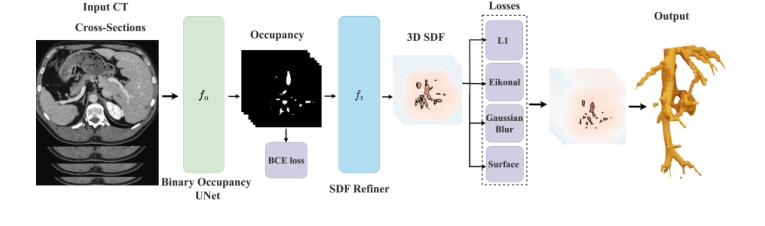 Figure 1. Overview of VesselSDF, our two-stage approach for vessel segmentation and reconstruction from CT scans. In the first stage, a 3D U-Net predicts a binary occupancy map. The second stage refines this occupancy into a signed distance field (SDF) using an additional 3D U-Net, guided by geometric regularization terms. The output 3D SDF, converted into a mesh, contains high-quality reconstructed vessels
Figure 1. Overview of VesselSDF, our two-stage approach for vessel segmentation and reconstruction from CT scans. In the first stage, a 3D U-Net predicts a binary occupancy map. The second stage refines this occupancy into a signed distance field (SDF) using an additional 3D U-Net, guided by geometric regularization terms. The output 3D SDF, converted into a mesh, contains high-quality reconstructed vessels
結果、限界、および結論
実験設計とベースライン
著者らは、血管ネットワーク再構築のための2段階フレームワークであるVesselSDFの有効性を検証するために、慎重に実験を設計した。最初の段階では、バイナリ占有マップを予測するために、マルチスケール血管特徴を捉えるためにアテンションゲートで強化された3D U-Netアーキテクチャを採用した。SDFを連続的な符号付き距離場(SDF)にリファインする責任を負う第2段階では、2つのエンコーダー・デコーダーレベルを持つ軽量な3D U-Netを使用した。両段階は、学習率 $5 \times 10^{-4}$ のAdamオプティマイザーを使用して100エポック共同でトレーニングされた。特に、SDF値の精度を維持するために、トレーニング中にデータ拡張は適用されなかった。トレーニングは、バッチサイズ16で $512 \times 512 \times 16$ の全体積入力で実施された。再構築後、マーチングキューブが512の解像度で適用され、最終的な血管メッシュが抽出された。総損失関数 $\mathcal{L} = \lambda_s \mathcal{L}_{sdf} + \lambda_o \mathcal{L}_{occ} + \lambda_e \mathcal{L}_{eik} + \lambda_g \mathcal{L}_{gauss} + \lambda_{sur} \mathcal{L}_{sur}$ は、いくつかの項を組み込んだ。教師ありSDFおよび占有損失、滑らかな距離遷移のためのアイコナール正則化、適応的な滑らかさのための距離重み付きガウス正則化器、および浮遊アーチファクトを抑制するための表面正則化。これらの項の重みは、$\lambda_s = 0.1$, $\lambda_o = 0.01$, $\lambda_e = 0.01$, $\lambda_g = 0.1$, および $\lambda_{sur} = 0.1$ に設定された。
VesselSDFのパフォーマンスは、2つの公開肝臓血管セグメンテーションデータセットで厳密にテストされた。
- 肝臓血管データセット(Medical Segmentation Decathlon - Task 08)[2]: 半自動アノテーション付きの肝静脈の303のCTスキャンで構成される。
- IRCADbデータセット[19]: 肝臓血管構造の完全手動セグメンテーションを含む、造影腹部CTスキャン20件を含む。
グラウンドトゥルースSDFは、トレーニングのためにバイナリグラウンドトゥルースから計算された。
その数学的主張を決定的に証明するために、著者らは3D血管再構築のための包括的な5つのメトリックセットを使用した。
- 体積オーバーラップ: ダイススコアと体積IoU(Intersection over Union)。
- トポロジー的類似性: ジャカード距離(JD)。
- 幾何学的精度: チャムファードスタンス(CD)とハウスドルフ距離(HD)。これらはそれぞれ平均表面距離と最大表面距離を測定する。
証拠が証明すること
表1および図2で提示された証拠は、特に複雑な血管ネットワークの幾何学的忠実性と接続性を維持する上で、VesselSDFの優れたパフォーマンスを明確に示している。
挑戦的な肝臓血管データセットでは、VesselSDFはすべてのメトリックでベースラインモデルを上回った。例えば、ダイススコアはnnU-Netの0.69と比較して0.72であり、チャムファードスタンス(値が低いほどパフォーマンスが良い)は0.68で、nnU-Netの0.82よりも大幅に優れていた。これは、VesselSDFのコアメカニズム、すなわち連続SDFと幾何学的正則化の活用が、従来のバイナリボクセル分類よりも正確な体積および表面再構築をもたらすという、決定的で否定できない証拠である。
IRCADbデータセットの場合、VesselSDFは体積ベースのメトリック(Dice, IoU, JD)でベースラインと同等のパフォーマンスを達成し、全体的なセグメンテーション精度が類似していることを示している。しかし、表面ベースのメトリック(CDおよびHD)ではベースラインを大幅に上回った。例えば、VesselSDFのCDは0.60であったのに対し、nnU-Netは0.75であり、HDは3.5であったのに対し、nnU-Netは4.2であった。これは、全体的な体積は類似している可能性があるが、VesselSDFは臨床分析に不可欠な、はるかに幾何学的に正確で滑らかな血管表面を生成することを示している。
図2の定性的な結果は、これらの発見をさらに強化する。視覚的な比較は、VesselSDFが細い血管と複雑な分岐パターンをより効果的に保持し、より完全で解剖学的に整合性の取れた再構築につながることを明確に示している。この手法は、バイナリボクセル分類アプローチを悩ませる一般的なアーチファクト(浮遊ジオメトリや切断された構造など)を実証的に低減する。
表2のアブレーションスタディは、VesselSDFの各コンポーネントの貢献に関する重要な洞察を提供する。SDFリファインメント段階(「SDFリファインメントなし」)を削除すると、ダイススコアが0.72から0.69に低下し、CDが0.68から0.70に増加し、第2段階が幾何学的精度に不可欠であることが証明された。初期バイナリ占有予測をバイパスして直接SDFを予測する(「バイナリ占有なし」)と、さらに大幅なパフォーマンス低下(Dice 0.65, CD 0.75)につながり、血管検出と幾何学的リファインメントを分離することの利点を検証した。最後に、適応的ガウス正則化(「ガウス損失なし」)をバイパスすると、同様のダイススコアが維持されたが、表面アーチファクトが導入され、重要な血管エッジの過度な平滑化を防ぐ上でのその役割が確認された。完全なVesselSDFは、すべてのメトリックで最高のパフォーマンスを達成し、SDFリファインメントは、改善された再構築メトリックによって示されるように、特に血管の連続性を向上させる。
限界と今後の方向性
VesselSDFは、特に疎なCTデータに対する血管ネットワーク再構築において、顕著な進歩を示しているが、本論文は暗黙的にさらなる開発の領域を示唆している。結論では、VesselSDFは「浮遊ジオメトリや切断された構造のような問題が少ない」と述べており、これらの課題は軽減されたものの、完全には排除されない可能性があることを示唆している。肝臓血管と疎なCTスライスに焦点を当てていることも、一般化における潜在的な限界を示唆している。
これらの発見をさらに発展させ、進化させるための議論のトピックをいくつか紹介する。
-
解剖学的構造とモダリティを横断する一般化: 現在の研究はCTスキャンからの肝臓血管に焦点を当てている。VesselSDFは、異なる幾何学的特性や病状を持つ可能性のある、冠動脈、脳血管、腎臓血管のような他の複雑な血管ネットワークに適用される場合、どの程度堅牢か?さらに、異なる解像度とノイズプロファイルを持つMRAやCTAのような異なるイメージングモダリティではどのように機能するか?多様なデータセットとドメイン適応技術を組み込むことにより、血管再構築のためのより一般的な「基盤モデル」を開発できるだろうか?
-
計算効率とリアルタイムアプリケーション: SDFは高い幾何学的忠実性を提供するが、その計算と再構築はリソースを大量に消費する可能性がある。迅速なフィードバックを必要とする臨床アプリケーション(術中ガイダンスやリアルタイム診断サポートなど)では、VesselSDFの推論速度がボトルネックになる可能性がある。今後の研究では、より効率的なニューラル暗黙表現、疎なSDF技術、または最適化されたハードウェアアクセラレーションを調査して、血管ネットワークのほぼリアルタイムの3D再構築を可能にすることが考えられる。
-
高度な臨床ワークフローとの統合: 静的な再構築を超えて、VesselSDFによって生成された高品質の3D血管モデルを、より高度な臨床ワークフローにどのように統合できるか?これには、血流動力学解析のための血流シミュレーション、拡張現実オーバーレイを使用した正確な手術計画、または患者固有のデバイス設計が含まれる可能性がある。臨床医がこれらの連続的な3D表現を操作および分析できるようにするユーザーフレンドリーなインターフェースとツールを開発することが重要になるだろう。
-
病理学的変動と異常に対する堅牢性: 使用されたデータセットは主に典型的な血管構造を表している。実際の臨床データは、血管形態を劇的に変化させる可能性のある重度の狭窄、動脈瘤、動静脈奇形、または腫瘍血管新生のような重大な病理学的変動をしばしば含む。VesselSDFは、これらの典型的な解剖学的構造からの極端な逸脱に対してどの程度堅牢か?今後の研究では、より多様な病理学的データセットの組み込み、特定の病理学的特徴に敏感な損失関数の開発、または敵対的トレーニングを使用して異常構造に対する堅牢性を向上させることに焦点を当てることが考えられる。
-
再構築における不確実性定量化: 医療画像では、モデルの予測の信頼度を知ることは、予測自体と同じくらい重要であることが多い。VesselSDFの場合、特に疎性またはノイズの高い領域では、再構築されたSDFの不確実性を定量化することは、臨床医に貴重な情報を提供する可能性がある。ベイジアンニューラルネットワークまたはアンサンブル手法を使用してSDF予測の不確実性を推定することは、再構築の臨床的有用性と信頼性を高める可能性がある。
-
静的な3Dを超えて:4D再構築へ: 多くの血管病理は、血管の拍動、血流の変化、または時間の経過に伴う変形のような動的なプロセスを含む。VesselSDFは、動的イメージングシーケンスから4D(3D +時間)血管ネットワークを再構築するように拡張できるか?これは、血管力学、血流パターン、および疾患の進行をより包括的な方法で研究する道を開くだろう。
 Table 1. Quantitative Results on the Hepatic Vessels and IRCADb datasets. Comparison of vessel reconstruction performance using different baselines. We report volume metrics (Dice Coefficient, Intersection over Union (IoU), and Jaccard similarity (JD)) and surface metrics (Chamfer distance (CD) ×100 and Hausdorff Distance (HD))
Table 1. Quantitative Results on the Hepatic Vessels and IRCADb datasets. Comparison of vessel reconstruction performance using different baselines. We report volume metrics (Dice Coefficient, Intersection over Union (IoU), and Jaccard similarity (JD)) and surface metrics (Chamfer distance (CD) ×100 and Hausdorff Distance (HD))
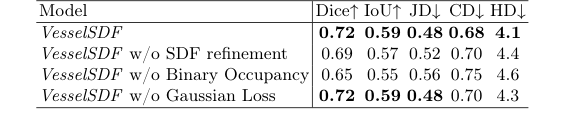 Table 2. Ablations on the Hepatic Vessels dataset
Table 2. Ablations on the Hepatic Vessels dataset
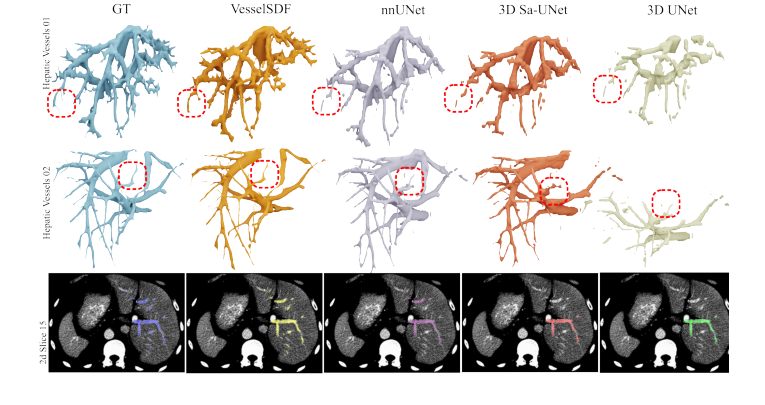 Figure 2. Qualitative 3D reconstruction results on the Hepatic Vessels dataset. The bottom row displays 2D slices highlighting the segmentation results
Figure 2. Qualitative 3D reconstruction results on the Hepatic Vessels dataset. The bottom row displays 2D slices highlighting the segmentation results