VesselSDF: Приоритеты поля расстояний для реконструкции сосудистых сетей
Проблема точной реконструкции сосудистых сетей из медицинских изображений, в частности из разреженных срезов КТ, давно является фундаментальной задачей в клинической диагностике и планировании хирургических вмешательств.
Предпосылки и академическая родословная
Происхождение и академическая родословная
Проблема точной реконструкции сосудистых сетей из медицинских изображений, в частности из разреженных срезов КТ, давно является фундаментальной задачей в клинической диагностике и планировании хирургических вмешательств. Эта проблема впервые возникла и приобрела известность по мере того, как медицинские технологии визуализации, такие как компьютерная томография (КТ), стали незаменимыми для диагностики состояний, начиная от ишемической болезни сердца и заканчивая оценкой опухолей. Ранние подходы к сегментации этих сложных, древовидных структур часто опирались на традиционные методы обработки изображений. Однако по мере роста потребности в более точных 3D-моделях сосудов для хирургической навигации, анализа динамики кровотока и раннего выявления аномалий, ограничения этих методов становились все более очевидными. Появление глубокого обучения принесло значительные достижения в сегментации медицинских изображений, но даже эти сложные модели испытывали трудности с уникальными характеристиками сосудистых сетей.
Фундаментальные "болевые точки", которые побудили авторов разработать VesselSDF, вытекают из трех критических ограничений предыдущих подходов:
- Артефакты зубчатой поверхности: Традиционные методы бинарной воксельной классификации представляют сосуды как дискретные 3D-кубы. Эта дискретная природа часто приводит к зубчатым, блочным поверхностям в реконструированных сосудах, что особенно проблематично для тонких сосудов с высоким соотношением поверхности к объему. Отсутствие гладкости делает модели менее точными для клинических применений.
- Анизотропные искажения и фрагментация: Медицинские КТ-сканы часто имеют гораздо более высокое разрешение в пределах каждого среза (в плоскости, $\Delta x, \Delta y$) по сравнению с расстоянием между срезами (толщина среза, $\Delta z$). Это значительное различие создает анизотропные искажения, вызывая фрагментацию или разрыв сосудов, особенно в точках ветвления или там, где они быстро меняют направление.
- Плавающие артефакты в SDF: Хотя поля знаковых расстояний (SDF) предлагают перспективный способ представления непрерывных поверхностей, существующие методы на основе SDF часто генерируют "плавающие артефакты" — мелкие, несвязанные фрагменты поверхности, которые появляются в реконструкции, но не соответствуют фактическим структурам сосудов, тем самым ухудшая общее качество и надежность 3D-модели.
Интуитивно понятные термины предметной области
- Поле знаковых расстояний (Signed Distance Field, SDF): Представьте, что у вас есть 3D-карта города, и вы хотите узнать, как далеко каждая точка города находится от ближайшей реки. SDF подобен этой карте, но для сосуда. Для любой точки в пространстве он указывает кратчайшее расстояние до поверхности сосуда. Если точка находится внутри сосуда, расстояние отрицательное; если снаружи — положительное; а если точно на поверхности — расстояние равно нулю. Это непрерывное представление помогает улавливать гладкие формы.
- Бинарная воксельная классификация (Binary Voxel Classification): Представьте 3D-изображение как состоящее из крошечных кирпичиков LEGO (вокселей). Бинарная воксельная классификация подобна решению для каждого отдельного кирпичика LEGO, является ли он частью сосуда (вы красите его красным) или нет (вы оставляете его прозрачным). Это простое решение "да" или "нет" для каждого крошечного куба, которое может привести к блочным или фрагментированным результатам.
- Разреженные срезы КТ (Sparse CT Scan Slices): Представьте, что вы пытаетесь понять полную 3D-форму сложного дерева, глядя только на несколько очень тонких, широко расположенных поперечных сечений его ствола и ветвей. Разреженный КТ-скан похож: вы получаете ограниченное количество "срезов" тела, и между ними есть значительные промежутки. Реконструкция непрерывных структур, таких как кровеносные сосуды, из этих немногих, удаленных друг от друга срезов является серьезной проблемой.
- Структурная непрерывность / Геометрическая точность (Structural Continuity / Geometric Fidelity): Это относится к тому, насколько хорошо реконструированный сосуд сохраняет свой естественный, непрерывный поток и точную форму. Если сосуд должен быть непрерывной трубкой, "структурная непрерывность" означает, что у него нет пробелов или разрывов. "Геометрическая точность" означает, что его кривые, ветвления и диаметры точно соответствуют реальному сосуду, а не являются зубчатыми, искаженными или упрощенными.
- Плавающие артефакты (Floating Artifacts): Представьте скульптора, пытающегося вырезать детализированную статую, но случайно оставляющего крошечные, нежелательные осколки камня, плавающие вокруг основной скульптуры. В 3D-реконструкции сосудов плавающие артефакты — это мелкие, несвязанные фрагменты геометрии, которые появляются в окончательной модели, но не принадлежат фактической сосудистой сети. Это ложные элементы, которые ухудшают качество и реализм реконструкции.
Таблица обозначений
| Обозначение | Описание |
|---|---|
| $V$ | Входной объемный КТ-скан |
| $D, H, W$ | Размеры КТ-скана (Глубина, Высота, Ширина) |
| $\mathbf{x}$ | 3D пространственная координата в $\mathbb{R}^3$ |
| $f_{SDF}(\mathbf{x}; \theta_r)$ | Предсказанное поле знаковых расстояний (SDF) в $\mathbf{x}$, параметризованное $\theta_r$ |
| $S$ | Поверхность сосуда, определяемая как нулевой уровень $f_{SDF}$ |
| $f_o(\mathbf{x}; \theta_o)$ | Предсказанная бинарная вероятность занятости в $\mathbf{x}$, параметризованная $\theta_o$ |
| $f^*_{SDF}(\mathbf{x})$ | Истинное SDF в $\mathbf{x}$ |
| $y$ | Истинная бинарная метка занятости в $\mathbf{x}$ (1 для сосуда, 0 для фона) |
| $\mathcal{L}$ | Общая функция потерь |
| $\mathcal{L}_{sdf}$ | Потери на основе SDF (норма L1) |
| $\mathcal{L}_{occ}$ | Потери на основе занятости (бинарная кросс-энтропия) |
| $\mathcal{L}_{eik}$ | Потери на основе эйконализации |
| $\mathcal{L}_{gauss}$ | Потери на основе гауссовой регуляризации с весом расстояния |
| $\mathcal{L}_{sur}$ | Потери на основе регуляризации поверхности |
| $\lambda_s, \lambda_o, \lambda_e, \lambda_g, \lambda_r$ | Веса для соответствующих членов потерь |
| $\partial_x, \partial_y, \partial_z$ | Частные производные по координатам x, y, z |
| $\gamma$ | Коэффициент анизотропного масштабирования для градиента по оси z в эйконализационной потере |
| $G_\sigma(\cdot)$ | Оператор 3D гауссова размытия со стандартным отклонением $\sigma$ |
| $\beta$ | Гиперпараметр для регуляризации поверхности |
| $\Omega$ | 3D обучающий объем |
| $\theta_o$ | Параметры U-Net для бинарной занятости |
| $\theta_r$ | Параметры U-Net для уточнения SDF |
| $g_e, h_e$ | Признаковые карты для управления и пропускных соединений в вентилях внимания |
| $a_e$ | Веса внимания |
| $\mathcal{A}(\cdot)$ | Обученная функция внимания |
| $W_g, W_h$ | Обучаемые матрицы весов для вентилей внимания |
Определение проблемы и ограничения
Основная постановка задачи и дилемма
Основная проблема, решаемая в данной статье, заключается в точной и надежной 3D-реконструкции сложных сосудистых сетей из разреженных медицинских изображений, в частности, срезов КТ.
Отправная точка (Вход/Текущее состояние) для предлагаемой VesselSDF — это объемный КТ-скан, представленный как $V \in \mathbb{R}^{D \times H \times W}$, где $D$ обозначает количество аксиальных срезов, а $H, W$ — размеры в плоскости. Эти входные данные характеризуются присущей им разреженностью, особенно между плоскостями изображения, и часто страдают от ограниченного разрешения в плоскости прохождения из-за таких факторов, как снижение дозы облучения или временные ограничения.
Желаемая конечная точка (Выход/Целевое состояние) — это непрерывное поле знаковых расстояний (SDF), $f_{SDF}(\mathbf{x}; \theta_r)$, которое неявно определяет поверхность сосуда как свой нулевой уровень: $S := \{\mathbf{x} \in \mathbb{R}^3 \mid f_{SDF}(\mathbf{x}; \theta_r) = 0\}$. Этот SDF должен позволять генерировать высококачественные реконструированные сосуды, которые точно отражают гладкую, трубчатую геометрию кровеносных сосудов, их сложные схемы ветвления и сохраняют структурную непрерывность и геометрическую точность. Конечная цель — обеспечить более надежный анализ сосудов для клинических условий.
Точное недостающее звено или математический пробел, который VesselSDF пытается преодолеть, заключается в переходе от дискретных, воксельных представлений и ошибочных непрерывных методов SDF к достижению поистине точной и топологически согласованной непрерывной поверхности сосуда. Традиционные подходы бинарной воксельной классификации, хотя и являются основополагающими, по своей сути создают зубчатые поверхностные артефакты, особенно выраженные в тонких сосудах. Кроме того, значительная анизотропия между разрешением в плоскости ($\Delta x, \Delta y$) и толщиной среза ($\Delta z$) в КТ-сканах приводит к фрагментированным структурам сосудов, особенно в критических точках ветвления. Хотя поля знаковых расстояний предлагают перспективное направление для непрерывного представления поверхности, существующие методы на основе SDF часто генерируют нежелательные "плавающие артефакты" — несвязанные фрагменты поверхности, которые серьезно ухудшают качество реконструкции. Данная статья переформулирует сегментацию сосудов как задачу регрессии непрерывного SDF, напрямую устраняя эти ограничения путем обучения непрерывного представления, которое по своей сути улавливает геометрию и связность сосудов.
Болезненный компромисс или дилемма, которая исторически удерживала исследователей в этой области, заключается в фундаментальном напряжении между сохранением тонкой связности сосудов и поддержанием точных границ, особенно для тонких, древовидных структур. Улучшение одного аспекта часто компрометирует другой. Например, агрессивное сглаживание для обеспечения непрерывности может привести к чрезмерному сглаживанию и потере мелких деталей, в то время как фокусировка на точных границах может привести к фрагментированным или несвязанным сегментам сосудов. Предыдущие подходы глубокого обучения, часто основанные на бинарной воксельной классификации, испытывают трудности с этой дилеммой, что приводит к моделям, которые либо не обладают структурной согласованностью, либо не обобщаются за пределы конкретных обучающих данных, вместо этого запоминая конфигурации, а не изучая обобщаемые геометрические принципы.
Ограничения и режимы отказа
Проблема точной реконструкции сосудистых сетей чрезвычайно сложна из-за нескольких суровых, реалистичных стен, с которыми сталкиваются исследователи:
-
Физические/геометрические ограничения:
- Тонкие, ветвящиеся структуры: Кровеносные сосуды обладают сложными схемами ветвления и различными диаметрами, часто будучи чрезвычайно тонкими. Точная реконструкция этих деликатных, древовидных структур из разреженных данных является серьезной проблемой.
- Сложная топология: Сложная топология сосудистых сетей с многочисленными бифуркациями и извилистыми путями затрудняет поддержание структурной целостности и предотвращение фрагментации, особенно в областях, где сосуды ветвятся или быстро меняют направление.
- Анизотропное разрешение: Существенная разница между разрешением в плоскости и толщиной среза в КТ-сканах создает анизотропные искажения. Это приводит к разрывам и фрагментации структур сосудов, особенно в точках ветвления, что затрудняет реконструкцию гладкой, непрерывной поверхности.
-
Вычислительные ограничения:
- Разреженность данных: Основной входной сигнал, разреженные срезы КТ, представляет собой присущую разреженность между плоскостями изображения. Это ограниченное разрешение в плоскости прохождения является прямым следствием усилий по снижению дозы облучения или соблюдению требований к задержке в реальном времени в клинических условиях, но оно серьезно ограничивает информацию, доступную для 3D-реконструкции.
- Вычислительная сложность для высокого разрешения: Достижение высокоразрешающих 3D-реконструкций из разреженных 2D-срезов обычно требует экспоненциально больше вычислительных ресурсов, что создает практический предел сложности модели и скорости вывода.
-
Ограничения, основанные на данных:
- Недостаток аннотированных данных: Существует присущий недостаток высококачественных наборов медицинских изображений, особенно тех, которые содержат подробные аннотации для тонких сосудистых структур. Эта нехватка данных часто приводит к тому, что модели запоминают конкретные конфигурации сосудов, а не изучают надежные, обобщаемые геометрические принципы.
- Высокая межсубъектная вариабельность: Сосудистые анатомии демонстрируют высокую межсубъектную вариабельность, что затрудняет эффективное обобщение моделей, обученных на ограниченных наборах данных, на разных пациентов и анатомические вариации.
Режимы отказа предыдущих подходов, которые VesselSDF стремится преодолеть, включают:
* Артефакты зубчатой поверхности: Дискретная природа воксельных представлений неизбежно приводит к ступенчатым или зубчатым поверхностям, особенно заметным в тонких сосудах, где соотношение поверхности к объему высокое.
* Фрагментированные и несвязанные сосуды: Из-за разреженных данных и анизотропного разрешения предыдущие методы часто дают фрагментированные или анатомически неправдоподобные реконструкции, при этом сосуды выглядят несвязанными или неполными. Мелкие сосуды часто не обнаруживаются или фрагментируются.
* Плавающие артефакты: Существующие методы на основе SDF, хотя и предлагают непрерывные представления, часто генерируют нежелательные "плавающие" артефакты — несвязанные фрагменты поверхности, которые не являются частью фактической сосудистой сети, ухудшая общее качество реконструкции.
* Отсутствие обобщения: Модели склонны запоминать конкретные закономерности из ограниченных обучающих данных, а не изучать универсальные геометрические априорные знания, что приводит к плохой производительности на невиданных данных или различных конфигурациях сосудов.
Почему этот подход
Неизбежность выбора
Принятие подхода регрессии непрерывного поля знаковых расстояний (SDF), воплощенного в VesselSDF, было не просто улучшением, а необходимым изменением парадигмы, учитывая присущие ограничения традиционных методов реконструкции сосудистых сетей. Авторы явно определяют точный момент этого осознания, подробно описывая критические недостатки существующих подходов глубокого обучения, особенно тех, которые основаны на бинарной воксельной классификации (например, стандартные CNN, такие как варианты U-Net).
Эти традиционные методы оказались принципиально недостаточными по нескольким причинам:
- Артефакты дискретного представления: Бинарные воксельные представления по своей природе создают зубчатые, ступенчатые поверхности. Это особенно проблематично для тонких, сложных сосудистых структур, где соотношение поверхности к объему высокое, что приводит к значительной потере геометрической точности и анатомически неправдоподобным реконструкциям.
- Анизотропное искажение и фрагментация: Медицинские данные визуализации, особенно разреженные срезы КТ, часто демонстрируют существенную разницу между разрешением в плоскости ($\Delta x, \Delta y$) и толщиной среза ($\Delta z$). Дискретные методы с трудом преодолевают эти пробелы, что приводит к анизотропным искажениям и фрагментированным структурам сосудов, особенно в критических точках ветвления. Это приводит к разрывам и потере критических геометрических признаков.
- Отсутствие структурной согласованности и обобщения: Существующие модели глубокого обучения, хотя и мощные, часто не могут поддерживать структурную согласованность в сложных сосудистых топологиях. Они склонны запоминать конкретные конфигурации сосудов из ограниченных обучающих данных, а не изучать обобщаемые геометрические принципы, что делает их склонными к созданию фрагментированных или несвязанных сосудов в невиданных данных.
- Плавающие артефакты в наивных SDF: Хотя SDF предлагают перспективное непрерывное представление, даже существующие методы на основе SDF могут генерировать "плавающие артефакты" — несвязанные фрагменты поверхности, которые ухудшают качество реконструкции. Это означало, что простого перехода к SDF было недостаточно; требовался более надежный подход, учитывающий артефакты.
Непрерывная природа SDF, которая по своей сути представляет поверхности гладко и улавливает согласованные пространственные отношения, стала единственным жизнеспособным решением для преодоления этих глубоко укоренившихся проблем, которые дискретные представления просто не могут решить. Требования задачи к гладким, непрерывным и топологически согласованным реконструкциям деликатных, ветвящихся структур из разреженных данных сделали переход к фреймворку регрессии непрерывной геометрии неизбежным.
Сравнительное превосходство
VesselSDF демонстрирует качественное превосходство, далеко выходящее за рамки простых метрик производительности, в первую очередь благодаря своей структурной конструкции и новым методам регуляризации. Его преимущества обусловлены тем, как он использует присущие свойства SDF, тщательно устраняя их распространенные недостатки:
- Присущая гладкость и геометрическая точность: В отличие от дискретных воксельных представлений, SDF естественным образом кодируют гладкие, непрерывные поверхности. VesselSDF использует это, переформулируя сегментацию сосудов как задачу регрессии непрерывного SDF. Это позволяет ему по своей сути улавливать гладкую, трубчатую геометрию кровеносных сосудов и их сложные схемы ветвления, обеспечивая реконструкции с превосходной геометрической точностью и структурной согласованностью.
- Адаптивная обработка шума и сохранение деталей: Ключевым структурным преимуществом является новый гауссовый регуляризатор с весом расстояния (Уравнение 8). Этот механизм адаптивно обеспечивает гладкость: он агрессивно размывает и сглаживает SDF в областях, далеких от поверхности сосуда (где $|f_{SDF}(\mathbf{x})|$ велико и шум более распространен), эффективно обрабатывая многомерный шум. Важно, что он одновременно сохраняет мелкие детали сосудов вблизи границ поверхности (где $|f_{SDF}(\mathbf{x})| \approx 0$), предотвращая чрезмерное сглаживание критических анатомических признаков. Это значительный качественный скачок по сравнению с методами, применяющими равномерную регуляризацию.
- Улучшенное обобщение за счет геометрических априорных знаний: Переформулируя задачу как регрессию непрерывной геометрии, а не дискретную классификацию, VesselSDF изучает лежащие в основе принципы формы, которые являются более универсальными. Регуляризация с весом расстояния еще больше укрепляет это, кодируя общие геометрические априорные знания, связанные с непрерывностью сосудов, вместо запоминания конкретных закономерностей. Это позволяет модели более эффективно переносить знания между различными конфигурациями сосудов и анатомическими вариациями.
- Надежное устранение артефактов: Комбинация адаптивного гауссового регуляризатора и члена регуляризации поверхности (Уравнение 9) обеспечивает надежный механизм для устранения распространенных артефактов SDF, таких как плавающие сегменты. Регуляризация поверхности специально наказывает значения SDF, близкие к нулю, без явных доказательств фактической поверхности, эффективно подавляя ложные или слабые границы, которые в противном случае могли бы появиться в виде несвязанных фрагментов.
- Раздельное двухэтапное уточнение: Двухэтапная архитектура, разделяющая первоначальное предсказание бинарной занятости от последующего уточнения SDF, является структурным преимуществом. Первоначальный U-Net обеспечивает надежную отправную точку, а второй этап, дополнительный 3D U-Net, фокусируется исключительно на уточнении этого в правильно масштабированный SDF, руководствуясь геометрической регуляризацией. Это разделение позволяет каждому этапу оптимизировать свою конкретную задачу, что приводит к более надежной и точной окончательной реконструкции.
Соответствие ограничениям
Дизайн VesselSDF идеально соответствует суровым требованиям реконструкции сосудистых сетей из разреженных КТ-данных, образуя "брак" между проблемой и решением:
- Ограничение: Разреженные срезы КТ и разрывы: Проблема характеризуется ограниченным разрешением в плоскости прохождения, что приводит к разрывам.
- Соответствие: Непрерывное представление SDF VesselSDF по своей сути интерполирует между разреженными срезами. Представляя каждую точку в объеме по ее знаковому расстоянию до ближайшей поверхности сосуда, он создает гладкую, непрерывную поверхность, которая заполняет пробелы, преодолевая фрагментацию, вызванную разреженностью. Представление SDF "по своей сути связывает соседние предсказания через свойства поля расстояний" (стр. 5), обеспечивая согласованность между срезами.
- Ограничение: Тонкие, ветвящиеся сосуды и зубчатые артефакты: Деликатные, древовидные структуры склонны к зубчатости при дискретных вокселях.
- Соответствие: Гладкая, трубчатая геометрия естественным образом улавливается непрерывным SDF. Это устраняет зубчатые артефакты, присущие воксельным методам, обеспечивая более точное и анатомически правдоподобное представление тонких сосудов и сложных схем ветвления.
- Ограничение: Поддержание структурной непрерывности и геометрической точности: Обеспечение того, чтобы сосуды оставались связанными и геометрически точными, имеет первостепенное значение.
- Соответствие: Эйконализационная регуляризация (Уравнение 7) способствует гладким переходам расстояний, обеспечивая градиенты, близкие к единице, предотвращая большие отклонения, которые могут привести к геометрическим артефактам. Кроме того, гауссовый регуляризатор с весом расстояния обеспечивает точную геометрию вблизи поверхностей сосудов, сохраняя при этом общую гладкость, напрямую решая проблемы как непрерывности, так и точности.
- Ограничение: Обобщение за пределы обучающих данных: Нехватка аннотированных данных приводит к запоминанию моделями конкретных закономерностей.
- Соответствие: Переформулируя задачу как регрессию непрерывной геометрии, VesselSDF изучает лежащие в основе принципы формы, а не конкретные воксельные закономерности. Регуляризация с весом расстояния дополнительно улучшает это, кодируя универсальные геометрические априорные знания, связанные с непрерывностью сосудов, улучшая способность модели обобщаться на различные конфигурации сосудов и анатомические вариации.
- Ограничение: Устранение плавающих артефактов: Распространенная проблема даже с существующими методами SDF.
- Соответствие: Адаптивный гауссовый регуляризатор и член регуляризации поверхности (Уравнение 9) специально разработаны для решения этой проблемы. Гауссовый регуляризатор обеспечивает гладкость в областях, далеких от поверхности сосуда, в то время как регуляризация поверхности подавляет слабые, шумные границы, которые в противном случае могли бы образовывать ложные, несвязанные компоненты сосудов.
Отклонение альтернатив
В статье четко изложены причины отклонения традиционных и даже некоторых современных подходов, в первую очередь сосредоточенных на ограничениях методов дискретной воксельной классификации и необходимости надежной регуляризации в методах на основе SDF.
Основной аргумент против популярных подходов, таких как стандартные CNN (например, 3D U-Net [5], 3D SA-UNet [8], nnU-Net [9]), заключается в их неспособности по своей сути представлять непрерывные, гладкие поверхности и эффективно обрабатывать анизотропные данные. Как указано, "Существующие подходы глубокого обучения, основанные на бинарной воксельной классификации, часто испытывают трудности со структурной непрерывностью и геометрической точностью" (Аннотация). В частности, эти методы:
- Создают зубчатые поверхностные артефакты: Дискретная природа вокселей неизбежно приводит к "зубчатым поверхностным артефактам, которые особенно выражены в тонких сосудах, где соотношение поверхности к объему высокое" (стр. 4).
- Страдают от анизотропных искажений: Существенная разница в разрешении между плоскостями изображения ($\Delta x, \Delta y$ против $\Delta z$) вызывает "анизотропные искажения, которые фрагментируют структуры сосудов, особенно в точках ветвления" (стр. 4).
- Испытывают трудности со структурной согласованностью: Они часто приводят к "фрагментированным или анатомически неправдоподобным реконструкциям" (стр. 2), не в состоянии поддерживать деликатную связность сосудистых сетей.
Хотя в статье признается появление других неявных нейронных представлений и методов на основе SDF (например, [1, 3, 11, 21]), она подразумевает их недостаточность, подчеркивая уникальные вклады VesselSDF. Авторы заявляют: "существующие методы на основе SDF часто генерируют плавающие артефакты, т.е. несвязанные фрагменты поверхности, которые ухудшают качество реконструкции" (стр. 4). Это предполагает, что без специфических для VesselSDF техник адаптивной гауссовой регуляризации и регуляризации поверхности даже другие подходы SDF не смогли бы обеспечить требуемый уровень надежности и подавления артефактов для сложных сосудистых данных. В статье не рассматриваются конкретные недостатки других популярных парадигм глубокого обучения, таких как генеративно-состязательные сети (GAN) или диффузионные модели, для данной конкретной задачи, но общая критика дискретных представлений широко применима ко многим подобным методам, если они полагаются на воксельные выходные данные.
Математический и логический механизм
Мастер-уравнение
В основе фреймворка VesselSDF лежит комплексная функция потерь, которая оркеструет процесс обучения на двух этапах. Это мастер-уравнение, которое авторы стремятся минимизировать во время обучения, элегантно сочетает цели контролируемого обучения с несколькими членами геометрической регуляризации. Это центральный математический двигатель, обеспечивающий способность модели реконструировать гладкие, непрерывные и топологически точные сосудистые сети.
Общая потеря $\mathcal{L}$ определяется как:
$$ \mathcal{L} = \lambda_s \mathcal{L}_{sdf} + \lambda_o \mathcal{L}_{occ} + \lambda_e \mathcal{L}_{eik} + \lambda_g \mathcal{L}_{gauss} + \lambda_r \mathcal{L}_{sur} $$
Это уравнение представляет собой взвешенную сумму пяти различных компонентов потерь, каждый из которых играет решающую роль в формировании предсказанного поля знаковых расстояний (SDF) и обеспечении качества окончательной реконструкции сосудов.
Потермная аутопсия
Давайте разберем каждый компонент мастер-уравнения, чтобы понять его индивидуальный вклад и обоснование его включения.
-
$\mathcal{L}$ (Общая потеря): Это общая целевая функция, которую модель VesselSDF стремится минимизировать. Ее значение отражает, насколько хорошо предсказания модели соответствуют истинным значениям и удовлетворяют наложенным геометрическим ограничениям. Цель процесса оптимизации — найти параметры модели, которые дают наименьшее возможное значение $\mathcal{L}$.
-
$\lambda_s, \lambda_o, \lambda_e, \lambda_g, \lambda_r$ (Веса потерь): Это скалярные гиперпараметры, которые определяют относительную важность каждого отдельного члена потерь. Например, авторы установили $\lambda_s = 0.1$, $\lambda_o = 0.01$, $\lambda_e = 0.01$, $\lambda_g = 0.1$ и $\lambda_r = 0.1$ в своих экспериментах. Регулируя эти веса, можно точно настроить баланс между прямым контролем и геометрической регуляризацией, подчеркивая одни аспекты реконструкции над другими. Выбор сложения здесь является стандартным для объединения нескольких целей в многозадачном обучении, позволяя каждому члену вносить независимый вклад в общий градиент.
-
$\mathcal{L}_{sdf}$ (Потери на основе SDF):
$$ \mathcal{L}_{sdf} = E_{x \in \Omega} |f_{SDF}(x) - f^*_{SDF}(x)| $$- Математическое определение: Этот член вычисляет абсолютную разницу L1 между предсказанным полем знаковых расстояний $f_{SDF}(x)$ в 3D пространственной координате $x$ и соответствующим истинным SDF $f^*_{SDF}(x)$. Ожидание $E_{x \in \Omega}$ означает, что эта разница усредняется по всем выбранным точкам $x$ в 3D обучающем объеме $\Omega$.
- Физическая/логическая роль: Это прямой член контроля для этапа уточнения SDF. Он заставляет модель изучать истинные значения знаковых расстояний, гарантируя, что предсказанная поверхность (где $f_{SDF}(x) = 0$) точно соответствует истинным границам сосуда. Норма L1 (абсолютная разница) часто предпочтительнее L2 (квадрат разницы) в задачах регрессии при работе с потенциальными выбросами или когда требуется надежный штраф за ошибки, поскольку она менее чувствительна к большим ошибкам. Она способствует разреженности ошибок.
- Почему L1?: Норма L1 обеспечивает линейный штраф за ошибки, делая ее более устойчивой к выбросам по сравнению с нормой L2, которая возводит ошибки в квадрат и может сильно зависеть от больших отклонений. Это помогает предотвратить чрезмерное влияние модели на шумные истинные значения SDF.
-
$\mathcal{L}_{occ}$ (Потери на основе занятости):
$$ \mathcal{L}_{occ} = -E_{x \in \Omega} [y \log(f_o(x)) + (1 - y) \log(1 - f_o(x))] $$- Математическое определение: Это потери бинарной кросс-энтропии. Здесь $y \in \{0, 1\}$ — истинная бинарная метка (1 для сосуда, 0 для фона) для точки $x$, а $f_o(x)$ — предсказанная вероятность занятости того, что точка $x$ принадлежит сосуду.
- Физическая/логическая роль: Этот член контролирует первый этап сети, предсказатель бинарной занятости. Он побуждает модель правильно классифицировать каждый воксель как принадлежащий сосуду или нет. Минимизируя эти потери, модель учится выдавать высокие вероятности для вокселей сосудов и низкие вероятности для фоновых вокселей.
- Почему бинарная кросс-энтропия?: BCE — это стандартная функция потерь для задач бинарной классификации. Она эффективно измеряет несоответствие между предсказанным распределением вероятностей и истинным бинарным распределением, подталкивая предсказания модели к правильным меткам.
-
$\mathcal{L}_{eik}$ (Потери на основе эйконализации):
$$ \mathcal{L}_{eik} = E_{x \in \Omega} [(\partial_x f_{SDF}(x))^2 + (\partial_y f_{SDF}(x))^2 + (\gamma \partial_z f_{SDF}(x))^2 - 1]^2 $$- Математическое определение: Этот член наказывает отклонения от идеального эйконализационного уравнения, которое гласит, что величина градиента истинного SDF почти везде равна 1. Он вычисляет квадрат разницы между квадратом величины градиента предсказанного SDF и 1. $\partial_x, \partial_y, \partial_z$ обозначают частные производные по координатам x, y и z. $\gamma = \frac{\Delta x}{\Delta z}$ — это коэффициент анизотропного масштабирования, который учитывает потенциальные различия в разрешении вокселей вдоль аксиальной оси (z) по сравнению с плоскостью (x, y).
- Физическая/логическая роль: Это критически важный член геометрической регуляризации. Он обеспечивает, чтобы предсказанный $f_{SDF}(x)$ вел себя как истинная функция расстояния, где расстояние равномерно изменяется при удалении от поверхности. Это предотвращает чрезмерное увеличение или уменьшение крутизны SDF, обеспечивая гладкие переходы расстояний и предотвращая геометрические артефакты, такие как "схлопнувшиеся" или "раздутые" поверхности. Анизотропное масштабирование $\gamma$ — это умный штрих для обработки распространенной проблемы неравномерного разрешения вокселей в медицинских изображениях.
- Почему квадрат разницы от 1?: Фундаментальное свойство истинной функции знаковых расстояний заключается в том, что величина ее градиента равна 1. Наказывая квадрат разницы от 1, потери побуждают модель изучать это свойство, делая SDF геометрически согласованным.
-
$\mathcal{L}_{gauss}$ (Потери на основе гауссовой регуляризации с весом расстояния):
$$ \mathcal{L}_{gauss} = E_{x \in \Omega} |f_{SDF}(x)| \cdot ||f_{SDF}(x) - G_\sigma(f_{SDF}(x))||_2^2 $$- Математическое определение: Этот член применяет ограничение на сглаживание с весом расстояния. Он вычисляет квадрат нормы L2 разницы между предсказанным SDF $f_{SDF}(x)$ и его размытым гауссовым вариантом $G_\sigma(f_{SDF}(x))$, где $G_\sigma$ — оператор 3D гауссова размытия со стандартным отклонением $\sigma$. Эта разница затем взвешивается абсолютным значением предсказанного SDF, $|f_{SDF}(x)|$.
- Физическая/логическая роль: Это адаптивный член сглаживания, предназначенный для уменьшения высокочастотного шума и плавающих артефактов, особенно в областях, далеких от поверхности сосуда. Весовой множитель $|f_{SDF}(x)|$ означает, что эффект сглаживания сильнее, когда $x$ находится далеко от поверхности сосуда (где $|f_{SDF}(x)|$ велико), и слабее, когда $x$ находится близко к поверхности (где $|f_{SDF}(x)| \approx 0$). Это позволяет модели достичь глобальной гладкости без чрезмерного сглаживания критических мелких деталей сосудов вблизи границ.
- Почему гауссово размытие с весом расстояния?: Гауссово размытие — это стандартный метод обработки изображений для сглаживания. Взвешивание по расстоянию является ключевым нововведением здесь: оно позволяет адаптивно сглаживать. Без него глобальный член сглаживания мог бы размыть важные мелкие структуры сосудов. Делая силу сглаживания зависимой от расстояния до поверхности, авторы гарантируют, что детали сохраняются там, где они наиболее важны.
-
$\mathcal{L}_{sur}$ (Потери на основе регуляризации поверхности):
$$ \mathcal{L}_{sur} = E_{x \in \Omega} \exp(-\beta |f_{SDF}(x)|) $$- Математическое определение: Этот член использует экспоненциальную функцию отрицательного абсолютного предсказанного SDF, взвешенную гиперпараметром $\beta > 0$.
- Физическая/логическая роль: Этот член специально разработан для подавления ложных или "плавающих" компонентов сосудов. Он сильно наказывает предсказанные значения SDF, которые близки к нулю, но не имеют явных доказательств фактической поверхности. Большее значение $\beta$ делает это наказание более агрессивным, эффективно отталкивая слабые, шумные границы от нулевого уровня, тем самым очищая реконструкцию.
- Почему экспоненциальная?: Экспоненциальная функция $\exp(-z)$ быстро убывает при увеличении $z$. Когда $z = \beta |f_{SDF}(x)|$, это означает, что потери очень высоки, когда $|f_{SDF}(x)|$ мало (т.е. близко к поверхности), и быстро падают по мере увеличения $|f_{SDF}(x)|$. Это создает сильный "отталкивающий" эффект для слабо поддерживаемых предсказаний вблизи поверхности, побуждая их либо стать определенной поверхностью, либо отойти далеко.
Пошаговый поток
Давайте представим себе одну абстрактную 3D пространственную координату, назовем ее $x$, когда она проходит через конвейер VesselSDF во время обучения. Представьте ее как крошечную частицу, движущуюся по сложному сборочному конвейеру.
-
Начальный ввод: Наша частица $x$ начинает свое путешествие как координата в необработанном объемном КТ-скане $V$. Система также имеет доступ к локальным признакам изображения вокруг $x$ из КТ-скана.
-
Этап 1: Предсказание занятости (Фаза "грубого наброска"):
- Координата $x$ (или, скорее, признаки, извлеченные из КТ-скана в $x$ и вокруг него) сначала поступает в 3D U-Net для бинарного предсказания занятости, который мы называем $f_o(\cdot; \theta_o)$.
- Внутри этого U-Net входные признаки обрабатываются через структуру кодер-декодер. На различных уровнях 3D вентили внимания (как описано в Уравнении 2) действуют как интеллектуальные фильтры. Они анализируют входящие карты признаков, $g_e$ и $h_e$, и генерируют веса внимания $a_e$. Эти веса затем модулируют признаки пропускных соединений, гарантируя, что сеть фокусирует свои вычислительные усилия на заметных областях сосудов и сохраняет мелкие детали, которые в противном случае могли бы быть потеряны.
- После прохождения через этот U-Net нашей частице $x$ присваивается вероятность занятости, $f_o(x)$. Это значение, обычно от 0 до 1, представляет собой первоначальную "догадку" сети о том, принадлежит ли $x$ сосуду (например, $f_o(x) \approx 1$) или фону (например, $f_o(x) \approx 0$). Это похоже на получение грубого, бинарного наброска сосуда.
-
Этап 2: Уточнение SDF (Фаза "прецизионной скульптуры"):
- Вероятность занятости $f_o(x)$ из Этапа 1 затем передается в сеть уточнения SDF, $f_r(\cdot; \theta_r)$. Важно отметить, что градиенты из этого этапа отсоединены от параметров первого этапа (
detach(fo(x;θo))). Это означает, что уточнение SDF использует предсказание занятости как фиксированный вход, предотвращая вмешательство его собственных геометрических ограничений в задачу первоначальной сегментации. - Уточнение SDF, еще один 3D U-Net, принимает эту информацию о занятости и через свою собственную многоуровневую обработку преобразует ее в непрерывное значение знакового расстояния, $f_{SDF}(x)$. Это значение больше не является вероятностью, а является действительным числом: отрицательным, если $x$ находится внутри сосуда, положительным, если снаружи, и в идеале нулем, если точно на поверхности сосуда. Здесь грубый набросок преобразуется в точное, непрерывное геометрическое представление.
- Вероятность занятости $f_o(x)$ из Этапа 1 затем передается в сеть уточнения SDF, $f_r(\cdot; \theta_r)$. Важно отметить, что градиенты из этого этапа отсоединены от параметров первого этапа (
-
Расчет потерь (Фаза "контроля качества"):
- Теперь и $f_o(x)$, и $f_{SDF}(x)$ сравниваются с их соответствующими истинными значениями ($y$ для занятости, $f^*_{SDF}(x)$ для SDF).
- Член $\mathcal{L}_{occ}$ проверяет, насколько хорошо $f_o(x)$ соответствует истинной бинарной метке $y$.
- Член $\mathcal{L}_{sdf}$ измеряет абсолютную разницу между $f_{SDF}(x)$ и истинным SDF $f^*_{SDF}(x)$.
- Член $\mathcal{L}_{eik}$ проверяет градиент $f_{SDF}(x)$, гарантируя, что он близок к 1, тем самым проверяя, что $f_{SDF}(x)$ ведет себя как надлежащее поле расстояний.
- Член $\mathcal{L}_{gauss}$ применяет проверку сглаживания с весом расстояния к $f_{SDF}(x)$, гарантируя, что удаленные области сглажены, сохраняя при этом резкие детали вблизи поверхности.
- Наконец, член $\mathcal{L}_{sur}$ наказывает любые слабые, неоднозначные значения SDF, близкие к нулю, эффективно "очищая" потенциальные плавающие артефакты.
- Все эти индивидуальные проверки объединяются в общую потерю $\mathcal{L}$, которая предоставляет единую метрику производительности модели для нашей частицы $x$.
-
Обновление параметров (Фаза "обучения"):
- На основе общей потери $\mathcal{L}$ вычисляются градиенты и используются оптимизатором (в данном случае Adam) для корректировки параметров ($\theta_o$ и $\theta_r$) обоих U-Net. Это итеративное корректирование, повторяемое в течение многих частиц и эпох, позволяет всей системе учиться и улучшать свои предсказания.
-
Окончательный вывод (Реконструированный сосуд):
- После обучения для вывода система принимает новые КТ-данные, и для любой точки $x$ выдает предсказанное значение $f_{SDF}(x)$. Поверхность сосуда затем просто определяется как совокупность всех точек, где $f_{SDF}(x) = 0$. Этот нулевой уровень затем может быть преобразован в 3D-сетку с использованием таких алгоритмов, как Marching Cubes, что приводит к окончательной, высококачественной реконструированной сосудистой сети.
Динамика оптимизации
Модель VesselSDF обучается и сходится путем итеративной минимизации общей функции потерь $\mathcal{L}$ с использованием оптимизатора Adam. Этот процесс включает в себя сложное взаимодействие градиентов и формирования ландшафта потерь, управляемое различными членами мастер-уравнения.
-
Поведение градиента:
- Во время каждой итерации обучения оптимизатор Adam вычисляет градиенты общей потери $\mathcal{L}$ по отношению ко всем обучаемым параметрам ($\theta_o$ для U-Net предсказания занятости и $\theta_r$ для U-Net уточнения SDF).
- Операция
detachв Уравнении 3 является критическим аспектом потока градиента. Она гарантирует, что градиенты от членов потерь, специфичных для SDF ($\mathcal{L}_{sdf}$, $\mathcal{L}_{eik}$, $\mathcal{L}_{gauss}$, $\mathcal{L}_{sur}$), не распространяются обратно для обновления параметров $\theta_o$ первоначальной сети предсказания занятости. Этот выбор дизайна изолирует задачу первоначальной сегментации, позволяя ей обеспечить стабильную, надежную отправную точку без искажений со стороны более сложных геометрических ограничений SDF. Только член $\mathcal{L}_{occ}$ вносит вклад в обновление $\theta_o$. - Напротив, все пять членов потерь вносят вклад в обновление $\theta_r$, параметров уточнения SDF. Это означает, что уточнение SDF одновременно учится соответствовать истинному SDF, обеспечивать эйконализационные свойства, сглаживать удаленные области и подавлять плавающие артефакты, все это опираясь на первоначальное предсказание занятости.
-
Формирование ландшафта потерь: Каждый член мастер-уравнения специфическим образом формирует многомерный ландшафт потерь, направляя оптимизацию к желаемому решению:
- $\mathcal{L}_{sdf}$ (Потери L1): Этот член создает "V-образную" долину в ландшафте потерь, центрированную вокруг истинных значений SDF. Линейный штраф обеспечивает постоянную величину градиента (кроме точного минимума), что помогает оптимизатору эффективно двигаться к истинным значениям SDF. Его устойчивость к выбросам означает, что случайные шумные истинные метки не будут сильно искажать ландшафт чрезвычайно крутыми градиентами.
- $\mathcal{L}_{occ}$ (Бинарная кросс-энтропия): Для сети занятости этот член формирует ландшафт, который сильно наказывает неправильную классификацию. Он создает крутые склоны, которые подталкивают предсказанные вероятности к 0 для фона и к 1 для сосуда, делая "энергетически выгодным" для модели принимать четкие, уверенные бинарные решения.
- $\mathcal{L}_{eik}$ (Эйконализационная регуляризация): Это мощное геометрическое ограничение. Оно создает ландшафт, где предсказания с величинами градиентов, близкими к 1, предпочтительны, формируя "желоб" вдоль идеального многообразия SDF. Отклонения от этого единичного градиента приводят к сильным штрафам, эффективно "подталкивая" предсказания модели к соответствию свойствам истинной функции расстояния. Это предотвращает неестественное схлопывание или раздувание SDF.
- $\mathcal{L}_{gauss}$ (Гауссовая регуляризация с весом расстояния): Этот член вводит адаптивный эффект сглаживания в ландшафт потерь. В областях, далеких от поверхности сосуда (где $|f_{SDF}(x)|$ велико), этот член создает более гладкий, плоский ландшафт, побуждая модель уменьшать высокочастотный шум. Однако вблизи поверхности сосуда (где $|f_{SDF}(x)| \approx 0$) его влияние уменьшается, позволяя ландшафту сохранять более резкие особенности, соответствующие мелким деталям сосудов. Это умный способ сбалансировать глобальную гладкость с локальной точностью.
- $\mathcal{L}_{sur}$ (Регуляризация поверхности): Экспоненциальная природа этого члена создает очень крутой "обрыв" в ландшафте потерь вокруг $f_{SDF}(x) = 0$. Если модель предсказывает слабую, неподтвержденную поверхность (т.е. $f_{SDF}(x)$ близко к нулю, но не подтверждено другими членами), этот член генерирует сильный градиент, который отталкивает $f_{SDF}(x)$ от нуля. Это эффективно "стирает" ложные плавающие артефакты, делая крайне невыгодным для модели предсказание неоднозначных значений вблизи поверхности.
-
Итеративные обновления состояния и сходимость:
- Оптимизатор Adam с адаптивными скоростями обучения для каждого параметра эффективно перемещается по этому сложному ландшафту потерь. Он использует оценки первого и второго моментов градиентов для корректировки размера шага для каждого параметра, позволяя быстрее сходиться в соответствующих направлениях и медленнее обновляться в шумных или плоских областях.
- В течение 100 эпох модель итеративно обновляет свои параметры. Изначально предсказания могут быть грубыми, но по мере обучения совокупное влияние контролируемых членов подтягивает предсказания к истинным значениям, в то время как члены регуляризации уточняют геометрию, обеспечивая гладкость, надлежащие свойства поля расстояний и подавление артефактов. Совместное обучение с отсоединенным потоком градиентов позволяет модели сначала установить надежную карту занятости, а затем тщательно уточнить ее до высококачественного, непрерывного SDF, что приводит к точным и топологически согласованным реконструкциям сосудов. Скорость обучения $5 \times 10^{-4}$ является распространенным выбором для Adam, обеспечивая хороший баланс между скоростью и стабильностью.
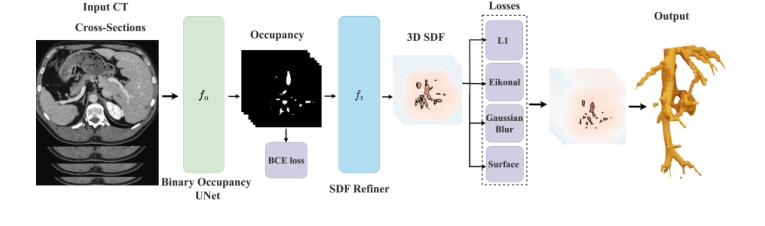 Figure 1. Overview of VesselSDF, our two-stage approach for vessel segmentation and reconstruction from CT scans. In the first stage, a 3D U-Net predicts a binary occupancy map. The second stage refines this occupancy into a signed distance field (SDF) using an additional 3D U-Net, guided by geometric regularization terms. The output 3D SDF, converted into a mesh, contains high-quality reconstructed vessels
Figure 1. Overview of VesselSDF, our two-stage approach for vessel segmentation and reconstruction from CT scans. In the first stage, a 3D U-Net predicts a binary occupancy map. The second stage refines this occupancy into a signed distance field (SDF) using an additional 3D U-Net, guided by geometric regularization terms. The output 3D SDF, converted into a mesh, contains high-quality reconstructed vessels
Результаты, ограничения и заключение
Экспериментальный дизайн и базовые модели
Авторы тщательно разработали свои эксперименты для проверки эффективности VesselSDF, двухэтапного фреймворка для реконструкции сосудистых сетей. Для первого этапа, который предсказывает бинарную карту занятости, они использовали архитектуру 3D U-Net, улучшенную вентилями внимания для захвата многомасштабных признаков сосудов. Второй этап, ответственный за уточнение этой занятости до непрерывного поля знаковых расстояний (SDF), использовал более легкий 3D U-Net с двумя уровнями кодера-декодера. Оба этапа обучались совместно в течение 100 эпох с использованием оптимизатора Adam со скоростью обучения $5 \times 10^{-4}$. Важно отметить, что во время обучения не применялось увеличение данных, чтобы сохранить точность значений SDF. Обучение проводилось на полных объемных входных данных размером $512 \times 512 \times 16$ с размером пакета 16. После реконструкции для извлечения окончательных сеток сосудов применялся метод Marching Cubes с разрешением 512. Общая функция потерь $\mathcal{L} = \lambda_s \mathcal{L}_{sdf} + \lambda_o \mathcal{L}_{occ} + \lambda_e \mathcal{L}_{eik} + \lambda_g \mathcal{L}_{gauss} + \lambda_{sur} \mathcal{L}_{sur}$ включала несколько членов: контролируемые потери SDF и занятости, эйконализационную регуляризацию для гладких переходов расстояний, гауссовый регуляризатор с весом расстояния для адаптивной гладкости и регуляризацию поверхности для подавления плавающих артефактов. Веса для этих членов были установлены как $\lambda_s = 0.1$, $\lambda_o = 0.01$, $\lambda_e = 0.01$, $\lambda_g = 0.1$ и $\lambda_{sur} = 0.1$.
"Жертвами" (базовыми моделями), против которых VesselSDF был тщательно протестирован, были три передовые архитектуры объемной сегментации, выполняющие бинарную воксельную классификацию:
1. 3D-UNet [5]: Фундаментальная архитектура кодера-декодера, широко используемая в сегментации медицинских изображений.
2. 3D SA-UNet [8]: Расширение 3D-UNet, включающее модули пространственного внимания, предназначенные для адаптивного взвешивания откликов признаков, особенно полезных для тонкой сосудистой сети.
3. nnU-Net [9]: Метод самоконфигурирования, который использует два U-Net (один для обработки низкого разрешения и один для обработки более высокого разрешения) для достижения надежной сегментации медицинских изображений.
Производительность VesselSDF оценивалась на двух общедоступных наборах данных сегментации печеночных сосудов:
- Набор данных печеночных сосудов (Medical Segmentation Decathlon - Task 08) [2]: Содержит 303 КТ-скана печеночных вен с полуавтоматическими аннотациями.
- Набор данных IRCADb [19]: Содержит 20 КТ-сканов брюшной полости с контрастным усилением и полностью ручными сегментациями сосудистых структур печени.
Истинные SDF были вычислены из бинарных истинных значений для обучения.
Чтобы окончательно доказать свои математические утверждения, авторы использовали комплексный набор из пяти метрик для 3D-реконструкции сосудов:
- Объемное перекрытие: Показатель Дайса и IoU (Intersection over Union).
- Топологическое сходство: Расстояние Жаккара (JD).
- Геометрическая точность: Расстояние Хамфри (CD) и расстояние Хаусдорфа (HD), которые измеряют среднее и максимальное поверхностное расстояние соответственно.
Что доказывают свидетельства
Свидетельства, представленные в Таблице 1 и на Рис. 2, недвусмысленно демонстрируют превосходную производительность VesselSDF, особенно в сохранении геометрической точности и связности сложных сосудистых сетей.
На сложном наборе данных Hepatic Vessels VesselSDF превзошел все базовые модели по всем метрикам. Например, его показатель Дайса составил 0.72 по сравнению с 0.69 у nnU-Net, а расстояние Хамфри (более низкое значение указывает на лучшую производительность) составило 0.68, что значительно лучше, чем 0.82 у nnU-Net. Это убедительное, неоспоримое доказательство того, что основной механизм VesselSDF, использующий непрерывные SDF и геометрическую регуляризацию, дает более точные объемные и поверхностные реконструкции, чем традиционная бинарная воксельная классификация.
Для набора данных IRCADb VesselSDF показал сопоставимую производительность с базовыми моделями по метрикам, основанным на объеме (Dice, IoU, JD), что указывает на аналогичную общую точность сегментации. Однако он значительно превзошел базовые модели по метрикам, основанным на поверхности (CD и HD). Например, CD VesselSDF составил 0.60, в то время как у nnU-Net — 0.75, а HD — 3.5 по сравнению с 4.2 у nnU-Net. Это подчеркивает, что, хотя общий объем может быть схожим, VesselSDF создает гораздо более геометрически точную и гладкую поверхность сосуда, что имеет решающее значение для клинического анализа.
Качественные результаты на Рис. 2 дополнительно подтверждают эти выводы. Визуальные сравнения ясно показывают, что VesselSDF более эффективно сохраняет тонкие сосуды и сложные схемы ветвления, что приводит к более полным и анатомически согласованным реконструкциям. Метод демонстрирует уменьшение распространенных артефактов, таких как плавающая геометрия и несвязанные структуры, которые преследуют подходы бинарной воксельной классификации.
Абляционное исследование в Таблице 2 дает ценное представление о вкладе каждого компонента VesselSDF. Удаление этапа уточнения SDF (w/o SDF refinement) привело к падению показателя Дайса с 0.72 до 0.69 и увеличению CD с 0.68 до 0.70, доказывая, что второй этап жизненно важен для геометрической точности. Пропуск первоначального предсказания бинарной занятости и прямое предсказание SDF (w/o Binary Occupancy) привело к еще более существенному снижению производительности (Dice 0.65, CD 0.75), подтверждая преимущество двухэтапного подхода в разделении обнаружения сосудов и геометрического уточнения. Наконец, удаление адаптивной гауссовой регуляризации (w/o Gaussian Loss) сохранило схожие показатели Дайса, но привело к появлению поверхностных артефактов, подтверждая ее роль в обеспечении глобальной гладкости без чрезмерного сглаживания критических краев сосудов. Полный VesselSDF достигает наилучшей производительности по всем метрикам, при этом уточнение SDF особенно улучшает непрерывность сосудов, как показано улучшенными метриками реконструкции.
Ограничения и будущие направления
Хотя VesselSDF представляет собой значительный прогресс в реконструкции сосудистых сетей, особенно для разреженных КТ-данных, статья косвенно указывает на области для дальнейшего развития. В заключении говорится, что VesselSDF демонстрирует "меньше проблем, таких как плавающая геометрия и несвязанные структуры", подразумевая, что эти проблемы, хотя и смягчены, могут быть не полностью устранены. Фокус на печеночных сосудах и разреженных КТ-срезах также предполагает потенциальные ограничения в обобщении.
Вот некоторые темы для обсуждения того, как мы можем дальше развивать и эволюционировать эти выводы:
-
Обобщение на различные анатомии и модальности: Текущая работа сосредоточена на печеночных сосудах из КТ-сканов. Насколько надежен VesselSDF при применении к другим сложным сосудистым сетям, таким как коронарные артерии, церебральная васкулатура или почечные сосуды, которые могут иметь различные геометрические характеристики и патологии? Более того, как он будет работать на различных методах визуализации, таких как МРА или КТА, с различными разрешениями и профилями шума? Можно ли разработать более обобщенную "фундаментальную модель" для реконструкции сосудов, возможно, путем включения разнообразных наборов данных и методов адаптации домена?
-
Вычислительная эффективность и приложения в реальном времени: Хотя SDF предлагают высокую геометрическую точность, их вычисление и реконструкция могут быть ресурсоемкими. Для клинических применений, требующих быстрой обратной связи, таких как интраоперационное руководство или поддержка диагностики в реальном времени, скорость вывода VesselSDF может быть узким местом. Будущие исследования могут изучить более эффективные неявные нейронные представления, разреженные методы SDF или оптимизированное аппаратное ускорение для обеспечения реконструкции сосудистых сетей в реальном времени.
-
Интеграция с передовыми клиническими рабочими процессами: Помимо статической реконструкции, как высококачественные 3D-модели сосудов, генерируемые VesselSDF, могут быть интегрированы в более передовые клинические рабочие процессы? Это может включать моделирование динамики кровотока для гемодинамического анализа, точное планирование хирургических вмешательств с наложениями дополненной реальности или даже разработку устройств, специфичных для пациента. Разработка удобных интерфейсов и инструментов, позволяющих клиницистам взаимодействовать с этими непрерывными 3D-представлениями и анализировать их, будет иметь решающее значение.
-
Надежность при патологических вариациях и аномалиях: Используемые наборы данных в основном представляют типичные структуры сосудов. Реальные клинические данные часто включают значительные патологические вариации, такие как тяжелые стенозы, аневризмы, артериовенозные мальформации или ангиогенез опухолей, которые могут резко изменять морфологию сосудов. Насколько надежен VesselSDF при таких экстремальных отклонениях от типичной анатомии? Будущие исследования могут быть сосредоточены на включении более разнообразных патологических наборов данных, разработке функций потерь, чувствительных к конкретным патологическим признакам, или использовании состязательного обучения для улучшения надежности против аномальных структур.
-
Квантификация неопределенности в реконструкции: В медицинской визуализации знание уверенности в предсказании модели часто так же важно, как и само предсказание. Для VesselSDF, особенно в областях с высокой разреженностью или шумом, квантификация неопределенности реконструированного SDF может предоставить ценную информацию клиницистам. Изучение байесовских нейронных сетей или ансамблевых методов для оценки неопределенности в предсказании SDF может повысить клиническую полезность и надежность реконструкций.
-
За пределами статических 3D: к 4D реконструкции: Многие сосудистые патологии включают динамические процессы, такие как пульсация сосудов, изменения кровотока или деформация во времени. Может ли VesselSDF быть расширен для реконструкции 4D (3D + время) сосудистых сетей из динамических последовательностей изображений? Это открыло бы возможности для изучения механики сосудов, закономерностей кровотока и прогрессирования заболеваний в более комплексной манере.
 Table 1. Quantitative Results on the Hepatic Vessels and IRCADb datasets. Comparison of vessel reconstruction performance using different baselines. We report volume metrics (Dice Coefficient, Intersection over Union (IoU), and Jaccard similarity (JD)) and surface metrics (Chamfer distance (CD) ×100 and Hausdorff Distance (HD))
Table 1. Quantitative Results on the Hepatic Vessels and IRCADb datasets. Comparison of vessel reconstruction performance using different baselines. We report volume metrics (Dice Coefficient, Intersection over Union (IoU), and Jaccard similarity (JD)) and surface metrics (Chamfer distance (CD) ×100 and Hausdorff Distance (HD))
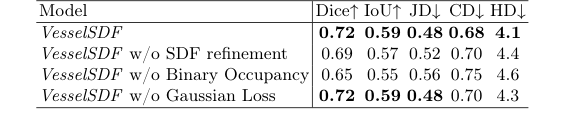 Table 2. Ablations on the Hepatic Vessels dataset
Table 2. Ablations on the Hepatic Vessels dataset
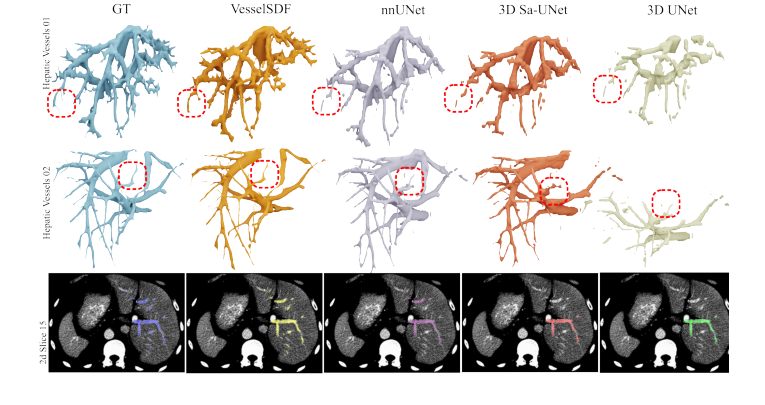 Figure 2. Qualitative 3D reconstruction results on the Hepatic Vessels dataset. The bottom row displays 2D slices highlighting the segmentation results
Figure 2. Qualitative 3D reconstruction results on the Hepatic Vessels dataset. The bottom row displays 2D slices highlighting the segmentation results