LiteTracker: 時間的因果関係を活用した高精度かつ低遅延な組織トラッキング
LiteTracker achieves lightning-fast, accurate endoscopic tissue tracking for real-time surgery.
背景と学術的系譜
内視鏡ビデオストリームにおける組織トラッキングの課題は、変形可能かつ非剛体的な生物学的表面上で安定した参照点を維持する必要がある外科ナビゲーションや拡張現実(XR)システムの要求に端を発する。歴史的に、この分野は一般的なコンピュータビジョンの「点トラッキング(Point Tracking)」(古典的なParticle Videosアプローチなど)から発展し、極めて高い精度と超低遅延の両立が求められる医療応用へと特化してきた。
CoTracker3のような従来のSOTAモデルにおける根本的な「ペインポイント」は、スライディングウィンドウ処理への依存にある。これらのモデルは、予測を出力する前に複数のフレーム(ウィンドウ)を蓄積する必要がある。外科手術の現場において、これはしばしば200msを超える重大かつ人工的な遅延を生じさせ、リアルタイムのロボットフィードバックや拡張現実オーバーレイには許容できない。さらに、これらのモデルにおける反復的なリファインメント(精緻化)モジュールは計算コストが高く、ランタイムが線形に増加するため、高速なフレーム単位のトラッキングを阻害している。
直感的なドメイン用語
- スライディングウィンドウ処理 (Sliding-Window Processing): 会話の内容を理解する際、相手が16語の文章をすべて言い終えるまで待たなければならない状況を想像されたい。常に16語分の遅延が発生する。LiteTrackerはこれを「ライブ」ストリームへと変革し、各単語が発せられるごとに処理を行う。
- 時間的メモリバッファ (Temporal Memory Buffer): これは「短期記憶」のノートのようなものである。新しいフレームごとに複雑な計算をゼロからやり直すのではなく、過去のフレームから得られた重要な結果をノート(バッファ)に書き留め、必要な時に参照することで、膨大な時間を節約する。
- 指数移動平均 (EMA) フロー: これは、車の直近の速度と方向に基づいてその位置を予測することに似ている。ランダムに推測するのではなく、過去の動きの加重平均を用いることで、次の瞬間の位置を非常にスマートかつ迅速に予測し、低速で反復的な修正を不要にする。
- 非剛体変形 (Non-rigid Deformations): 剛体(テーブルなど)とは異なり、組織は伸縮し、折り畳まれ、押しつぶされる。これをトラッキングすることは、外科用ツールによって絶えず引っ張られ、ねじられる布地上の特定の点を追跡することに等しい。
表記法一覧
| 表記 | 説明 |
|---|---|
| $I_t$ | 時刻 $t$ におけるビデオフレーム |
| $Q$ | トラッキング対象となるクエリ点の集合 |
| $V_t$ | 時刻 $t$ における予測可視性スコア ($V_t \in [0, 1]$) |
| $C_t$ | 時刻 $t$ における予測信頼度スコア ($C_t \in [0, 1]$) |
| $P_t$ | 時刻 $t$ における点の予測2D位置 $(x, y)$ |
| $T_W$ | ウィンドウサイズ(同時に処理されるフレーム数) |
| $S$ | ストライド(処理間でスキップされるフレーム数) |
| $T_B$ | 時間的メモリバッファの容量 |
| $F_t$ | 指数移動平均フローベクトル |
| $\alpha$ | EMAフローのための時間的平滑化係数 |
数学的解釈
著者らは、重いスライディングウィンドウアーキテクチャを、時間的メモリバッファによってサポートされるフレーム単位のアプローチに置き換えることで、遅延の問題を解決した。元の反復的なリファインメントなしで精度を維持するため、スマートな初期化戦略を導入している。
初期化の核心は、以下のように定義されるEMAフローである:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
この式は、直近の動き $(P_{t-1} - P_{t-2})$ と過去の傾向 $F_{t-1}$ をブレンドすることで、モーションベクトル $F_t$ を算出する。$\alpha = 0.8$ に設定することで、モデルは直近の動きを重視し、次の位置 $P_t^{\text{init}}$ を高精度に予測可能となる:
$$P_t^{\text{init}} = P_{t-1} + F_t$$
この正確な開始点を提供することで、モデルは単一パス ($L=1$) で収束を達成し、従来のモデルを悩ませていた計算負荷の高い反復ループを実質的に排除した。時間的メモリバッファは、リングバッファからキャッシュされた相関特徴量を単純に取得するため、特徴抽出という「重労働」が繰り返されることを防ぐ。
問題定義と制約
核心的な問題定式化とジレンマ
開始点と目標状態
システムの入力は連続的な内視鏡ビデオストリームであり、目標は「長期点トラッキング」を実行すること、すなわち、解剖学的ランドマークや組織点を多数のフレームにわたって追跡することである。望ましい出力は、これらの点の正確な座標 $(x_t, y_t)$ と、その可視性および信頼度スコアのリアルタイム取得である。欠けているリンクは、高精度なトラッキング(通常は重い複数フレームのコンテキスト処理を要する)を維持しつつ、手術室環境の厳格な低遅延要件を同時に満たす能力である。
根本的なジレンマ
著者らは、時間的コンテキストと計算遅延の間の古典的なトレードオフに直面している。非剛体変形、ツールの遮蔽、急激なカメラ移動を特徴とする複雑な外科シーンにおいて組織を正確に追跡するため、現代のモデル(前身であるCoTracker3など)は「スライディングウィンドウ」処理に依存している。これは、アルゴリズムがフレームのシーケンス(例:16フレーム)をバッファリングし、正確な位置に収束するために複数の反復リファインメントステップを実行しなければならないことを意味する。これは、デジタルオーバーレイと物理的な組織の同期がずれることで安全性を損なう可能性がある、リアルタイムの外科ロボットやXRアプリケーションには許容できない「待機」期間を生じさせる。
ソリューションの数学的解釈
このギャップを埋めるため、著者らは重く冗長な計算を回避する2つの主要な「学習不要(training-free)」な最適化を導入した。
1. 時間的メモリバッファ(効率的な特徴量再利用)
新しいフレームごとにスライディングウィンドウ全体を再処理する代わりに、著者らは容量 $T_B = 16$ のリングバッファを実装した。このバッファは、ペアワイズの類似性測定を含むパイプラインの中で最も計算コストの高い部分である「相関特徴量」をキャッシュする。これを保存することで、システムはウィンドウストライドを待つことなく、フレーム単位の処理が可能となる。
2. 指数移動平均 (EMA) フロー初期化
(点を「見つける」ために以前必要とされていた)複数の反復リファインメントステップを不要にするため、著者らは巧妙な初期化戦略を導入した。EMAフロー $F_t$ を使用して、リファインメントモジュールが処理を行う前に点の位置を予測する:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
ここで $P_t$ は点の位置、$\alpha$ は平滑化係数(経験的に $0.8$ に設定)である。これにより、モデルは新しいフレームの初期位置を次のように計算できる:
$$P^{\text{init}}_t = P_{t-1} + F_t$$
この高精度な「推測」をTransformerに提供することで、モデルはリファインメントモジュールを単一パス ($L := 1$) で通過させ、収束を達成できる。これは反復ループの計算コストを実質的に消滅させるものであり、遅延低減における大きなブレイクスルーである。
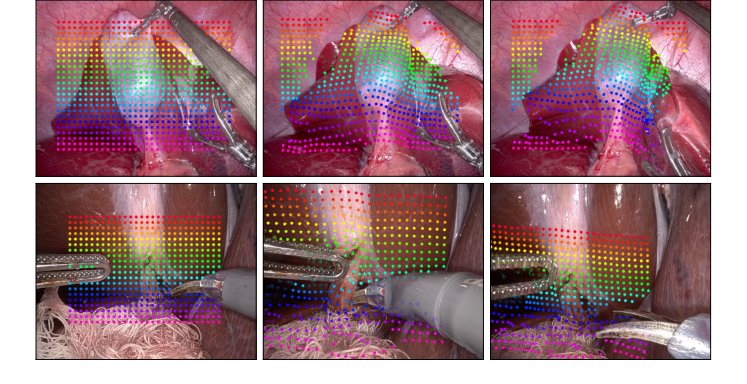 Figure 3. Qualitative results on video samples from the STIR Challenge 2024 [16] (top) and StereoMIS [7] (bottom) datasets. LiteTracker shows high tissue-tracking accuracy and occlusion handling under challenging deformations, tool interactions and perspec- tive changes
Figure 3. Qualitative results on video samples from the STIR Challenge 2024 [16] (top) and StereoMIS [7] (bottom) datasets. LiteTracker shows high tissue-tracking accuracy and occlusion handling under challenging deformations, tool interactions and perspec- tive changes
なぜこのアプローチか
選択の必然性
LiteTrackerの著者らは、現代の外科トラッキングにおける根本的なボトルネックを特定した。それは、Transformerベースの長期点トラッカー(CoTracker3など)の高い精度と、リアルタイム手術室環境の厳格な低遅延要件との間のトレードオフである。従来の「SOTA」手法は堅牢ではあるものの、スライディングウィンドウ処理に依存しており、システムは出力生成前にフレームのバッファ(例:16フレーム)を待機せざるを得ない。これは重大な「暗黙的遅延」を導入し、数百ミリ秒の遅延さえも安全性を損なう外科ロボット工学においては許容できない。
比較優位性
LiteTrackerは、Transformerモデルを有効にする時間的コンテキストを犠牲にすることなく、ウィンドウベースのバッチ処理からフレーム単位のアプローチへとパラダイムをシフトさせるため、質的に優れている。
- 構造的優位性: 時間的メモリバッファ(容量 $T_B = 16$ のリングバッファ)を実装することで、著者らは高コストな相関特徴量の冗長な再計算を回避している。これにより、計算オーバーヘッドは $O(N \cdot T_W)$ から、より効率的なフレーム単位の更新へと削減される。ここで $N$ は点の数、$T_W$ はウィンドウサイズである。
- 効率性: 本手法は $29.67$ ms の推論遅延を達成しており、これはCoTracker3より約 $7$ 倍、従来の最速手法であるTrack-Onより $2$ 倍高速である。スライディングウィンドウ蓄積による暗黙的遅延を考慮すると、CoTracker3に対する総遅延改善率は約 $16.6$ 倍に達する。
数学的・論理的メカニズム
数学的エンジン:指数移動平均 (EMA) フロー
LiteTrackerが計算コストの高い反復リファインメントを必要とせずに、高速かつ低遅延なパフォーマンスを達成することを可能にする数学的革新は、指数移動平均 (EMA) フロー初期化である。
このメカニズムを支配するマスター方程式は以下の通りである:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
方程式の分解
- $F_t$: 現在のフレーム $t$ に対する予測モーションベクトル(フロー)。これは、$t-1$ の位置から推定される $t$ の位置への点の変位を表す。
- $\alpha$: 時間的平滑化係数($0.8$ に設定)。これは「記憶の重み」として機能し、モデルが直近の観測された動きと過去の傾向のどちらをどの程度信頼するかを決定する。
- $(P_{t-1} - P_{t-2})$: この項は、過去2フレーム間における点の瞬間速度を計算する。組織の「現在の」方向を提供する。
- $F_{t-1}$: 以前に計算されたフローベクトル。これを含めることで、物理学における運動量項のように機能し、ノイズによるトラッキングのジッター(揺れ)を防ぎ、一貫した軌道を維持する。
結果、限界、および結論
LiteTrackerの分析:リアルタイム外科組織トラッキング
LiteTrackerの著者らは、重く反復的なウィンドウベースのプロセスを、効率化された単一パスのフレーム単位プロセスへと変換することで、遅延の問題を解決した。これは、高コストな特徴量をリングバッファにキャッシュし、単純かつエレガントな数学的ヒューリスティック(EMAフロー)を用いて点の位置を初期化することで達成された。
実験的検証
著者らは、CoTracker3、Track-On、および様々なMFTバリアントといったベースラインモデルに対して、自らのアーキテクチャを厳格にテストした。その証拠は説得力がある:
* 速度: LiteTrackerは 29.67 ms の推論遅延を達成し、CoTracker3より約 7倍、従来の最速手法であるTrack-Onより 2倍 高速となった。
* 精度: 大幅な高速化にもかかわらず、STIRおよびSuPerデータセットにおいて競争力のあるトラッキング精度を維持した。
* アブレーション研究: 著者らは、EMAフロー初期化においてリファインメントステップを増やしすぎると、かえってパフォーマンスが低下することを証明した。これは、彼らの初期化が極めて正確であり、さらなる反復は不要であるどころか有害であることを裏付けている。
他分野との同型性(Isomorphisms)
LiteTrackerの分析:低遅延組織トラッキング
背景と動機
ロボット手術や拡張現実(XR)の文脈において、軟組織の動きをリアルタイムで追跡することは根本的な課題である。剛体とは異なり、生物学的組織は複雑な非剛体変形、自己遮蔽、急激な視点変化を伴う。CoTracker3のような既存のSOTA手法は、高精度を維持するために複数のフレームを一度に処理するスライディングウィンドウアーキテクチャに依存している。このアプローチは有効ではあるが、計算上の大きな遅延を導入し、ミリ秒単位の遅延が安全性と精度に影響を及ぼすリアルタイムの手術環境には不向きである。本論文の著者らは、高精度な長期トラッキングと、術中アプリケーションの厳格な低遅延要件との間のギャップを埋めることを目指した。
核心的な問題と数学的解決策
著者らは、既存モデルにおける主要なボトルネックが、スライディングウィンドウ内での特徴量の冗長な再計算と、計算コストの高い反復リファインメントモジュールへの依存にあることを特定した。
これを解決するため、彼らは2つの主要な最適化を導入した:
1. 時間的メモリバッファ: フレームを再処理する代わりに、容量 $T_B = 16$ のリングバッファを実装し、相関特徴量をキャッシュした。これにより、以前に計算されたデータを再利用してフレーム単位のトラッキングを実行でき、計算負荷を効果的に削減した。
2. 指数移動平均 (EMA) フロー初期化: 複数の反復リファインメントステップを不要にするため、動きに基づいた初期化を導入した。フロー $F_t$ を次のように定義することで:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
(ここで $\alpha = 0.8$)、新しいフレームの初期位置 $P_t^{\text{init}}$ を次のように予測できる:
$$P_t^{\text{init}} = P_{t-1} + F_t$$
これは、モデルが単一パス ($L=1$) で高精度を達成することを可能にする堅牢な開始点を提供し、推論時間を劇的に短縮する。
構造的骨格
冗長な反復計算を、キャッシュされた時間的メモリと予測的な動きベースの初期化に置き換えることで、リアルタイムの状態推定を実現するメカニズム。