LiteTracker:利用时间因果关系实现高精度、低延迟的组织追踪
LiteTracker achieves lightning-fast, accurate endoscopic tissue tracking for real-time surgery.
背景与学术渊源
内窥镜视频流中的组织追踪问题,源于手术导航及扩展现实(XR)系统对非刚性生物表面保持稳定参考点的需求。从学术演进的角度看,该领域由通用的计算机视觉“点追踪”(如经典的 Particle Videos 方法)发展而来,并逐渐聚焦于医疗应用。在医疗场景中,核心挑战在于必须同时满足极高的准确性与超低延迟,这直接关系到手术的安全性。
现有 SOTA 模型(如 CoTracker3)的主要痛点在于其对滑动窗口(Sliding-Window)处理机制的依赖。这些模型在输出预测前,必须累积多个帧(即一个“窗口”)。在手术环境中,这会产生显著的人为延迟(通常超过 200ms),这对于实时机器人反馈或增强现实叠加而言是不可接受的。此外,这些模型中的迭代细化模块计算开销巨大,导致运行时间随帧数线性增加,从而阻碍了高速的逐帧追踪。
直观领域术语
- 滑动窗口处理 (Sliding-Window Processing): 类似于在理解对话时,必须等待对方说完整个 16 个字的句子后才能处理其中的任何词汇。这种机制导致处理过程始终滞后 16 个字。LiteTracker 将其转变为“实时”流,即在每个词被说出时即刻处理。
- 时间记忆缓冲区 (Temporal Memory Buffer): 可将其视为“短期记忆”笔记本。系统无需为每一帧从头重新计算复杂的数学运算,而是将之前帧的重要结果记录在笔记本(缓冲区)中,并在需要时直接检索,从而节省大量时间。
- 指数移动平均 (EMA) 流 (Exponential Moving Average Flow): 类似于根据车辆近期的速度和方向预测其位置。与其随机猜测,不如利用其过去运动的加权平均值,对下一时刻的位置做出快速且智能的预判,从而避免缓慢且重复的修正。
- 非刚性形变 (Non-rigid Deformations): 与刚性物体(如桌子)不同,组织会发生拉伸、折叠和挤压。追踪组织类似于追踪一块被手术器械不断拉扯和扭曲的织物上的特定点。
符号表
| 符号 | 描述 |
|---|---|
| $I_t$ | $t$ 时刻的视频帧 |
| $Q$ | 待追踪的查询点集合 |
| $V_t$ | $t$ 时刻的预测可见性分数 ($V_t \in [0, 1]$) |
| $C_t$ | $t$ 时刻的预测置信度分数 ($C_t \in [0, 1]$) |
| $P_t$ | $t$ 时刻点的预测二维坐标 $(x, y)$ |
| $T_W$ | 窗口大小(共同处理的帧数) |
| $S$ | 步长(处理间跳过的帧数) |
| $T_B$ | 时间记忆缓冲区的容量 |
| $F_t$ | 指数移动平均流向量 |
| $\alpha$ | EMA 流的时间平滑因子 |
数学解释
作者通过引入时间记忆缓冲区,以逐帧处理方法取代了繁重的滑动窗口架构,从而解决了延迟问题。为了在没有原始迭代细化的情况下保持准确性,作者提出了一种智能初始化策略。
其初始化的核心是 EMA 流,定义如下:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
该方程通过融合最近的运动 $(P_{t-1} - P_{t-2})$ 与历史趋势 $F_{t-1}$ 来计算运动向量 $F_t$。通过设置 $\alpha = 0.8$,模型赋予最近运动更高的权重,从而能够以高精度预测下一位置 $P_t^{\text{init}}$:
$$P_t^{\text{init}} = P_{t-1} + F_t$$
通过提供这一精确的起始点,模型实现了单次传递($L=1$)收敛,有效消除了困扰先前模型的计算密集型迭代循环。随后,时间记忆缓冲区确保了特征提取的“繁重工作”无需重复,系统只需从环形缓冲区中检索缓存的相关性特征即可。
问题定义与约束
核心问题表述与困境
起点与目标状态
系统的输入是连续的内窥镜视频流,目标是执行“长期点追踪”,即在多帧中跟踪特定的解剖标志或组织点。期望的输出是这些点在实时状态下的精确坐标 $(x_t, y_t)$,以及它们的可见性和置信度分数。缺失的环节在于:如何在保持高追踪精度(通常需要繁重的多帧上下文处理)的同时,满足手术室环境严格的低延迟要求。
基本困境
作者面临着时间上下文与计算延迟之间的经典权衡。为了在复杂的术中场景(具有非刚性形变、器械遮挡和快速相机移动等特征)中准确追踪组织,现代模型(如前作 CoTracker3)依赖于“滑动窗口”处理。这意味着算法必须缓冲一系列帧(例如 16 帧)并执行多次迭代细化步骤以收敛至准确位置。这产生了一个“等待”周期,对于实时手术机器人或 XR 应用而言是不可接受的,因为哪怕几毫秒的延迟都可能导致数字叠加层与物理组织之间的不同步。
解决方案的数学解释
为了弥合这一差距,作者引入了两种主要的“无需训练”优化方案,绕过了繁重且冗余的计算。
1. 时间记忆缓冲区(高效特征重用)
作者实现了一个容量为 $T_B = 16$ 的环形缓冲区,用于缓存“相关性特征”(即流水线中涉及成对相似度测量、计算开销最大的部分),而非为每一新帧重新处理整个滑动窗口。通过存储这些特征,系统避免了冗余计算,实现了逐帧处理。
2. 指数移动平均 (EMA) 流初始化
为了消除多次迭代细化步骤(此前用于“寻找”点),作者引入了基于运动的初始化策略。他们利用 EMA 流 $F_t$ 在细化模块介入前预测点的位置:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
其中 $P_t$ 为点位置,$\alpha$ 为平滑因子(经验设定为 $0.8$)。这使得模型能够计算新帧的初始位置:
$$P^{\text{init}}_t = P_{t-1} + F_t$$
通过向 Transformer 提供这一高精度的“猜测”,模型可在细化模块中实现单次传递($L := 1$)收敛。这有效地降低了迭代循环的计算成本,是减少延迟的一项重大突破。
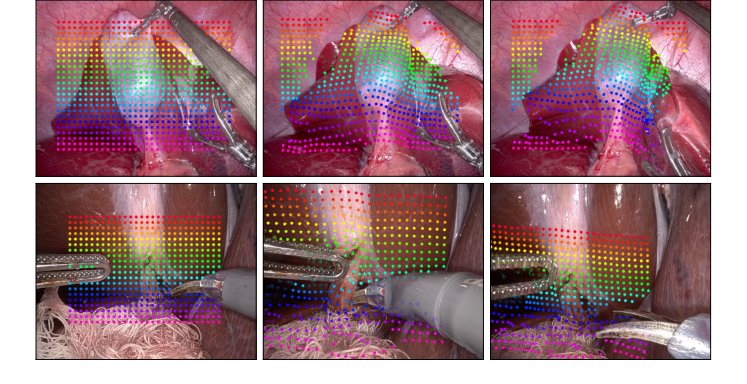 Figure 3. Qualitative results on video samples from the STIR Challenge 2024 [16] (top) and StereoMIS [7] (bottom) datasets. LiteTracker shows high tissue-tracking accuracy and occlusion handling under challenging deformations, tool interactions and perspec- tive changes
Figure 3. Qualitative results on video samples from the STIR Challenge 2024 [16] (top) and StereoMIS [7] (bottom) datasets. LiteTracker shows high tissue-tracking accuracy and occlusion handling under challenging deformations, tool interactions and perspec- tive changes
为何选择此方法
选择的必然性
LiteTracker 的作者识别出现代手术追踪中的根本瓶颈:基于 Transformer 的长期点追踪器(如 CoTracker3)的高精度与实时手术室环境严格的低延迟要求之间的权衡。传统的 SOTA 方法虽然稳健,但依赖于滑动窗口处理,迫使系统在产生输出前等待帧缓冲区(例如 16 帧)。这引入了显著的“隐性延迟”,对于手术机器人而言是不可接受的。
比较优势
LiteTracker 在定性上更具优势,因为它将范式从基于窗口的批处理转移到了逐帧处理,且未牺牲 Transformer 模型有效的时间上下文。
- 结构优势: 通过实现时间记忆缓冲区(容量为 $T_B = 16$ 的环形缓冲区),作者避免了昂贵相关性特征的冗余重计算。这使得计算开销从 $O(N \cdot T_W)$ 降低为更高效的逐帧更新(其中 $N$ 为点数,$T_W$ 为窗口大小)。
- 效率: 该方法的推理延迟为 $29.67$ ms,比 CoTracker3 快约 $7$ 倍,比此前最快的方法 Track-On 快 $2$ 倍。若计入滑动窗口累积的隐性延迟,其相对于 CoTracker3 的总延迟改善约为 $16.6$ 倍。
数学与逻辑机制
数学引擎:指数移动平均 (EMA) 流
使 LiteTracker 能够在无需计算密集型迭代细化的情况下实现高速、低延迟性能的核心数学创新是 EMA 流初始化。
控制该机制的主方程为:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
方程解析
- $F_t$:当前帧 $t$ 的预测运动向量(流)。它表示点从 $t-1$ 时刻的位置到 $t$ 时刻估计位置的位移。
- $\alpha$:时间平滑因子(设为 $0.8$)。它充当“记忆权重”,决定模型对最近观测到的运动与历史趋势的信任程度。
- $(P_{t-1} - P_{t-2})$:该项计算两前帧之间点的瞬时速度,提供了组织的“当前”方向。
- $F_{t-1}$:先前计算的流向量。通过包含此项,作者确保了模型保持轨迹的一致性,类似于物理学中的动量项,防止追踪因噪声而产生抖动。
结果、局限性与结论
LiteTracker 分析:实时手术组织追踪
LiteTracker 的作者通过将繁重的、迭代的、基于窗口的过程转化为精简的、单次的、逐帧的过程,解决了延迟问题。他们通过在环形缓冲区中缓存昂贵特征,并使用简单且优雅的数学启发式方法(EMA 流)来初始化点位置,实现了这一目标。
实验验证
作者针对 CoTracker3、Track-On 及各种 MFT 变体等基准模型对架构进行了严格测试。证据表明:
* 速度: LiteTracker 的推理延迟达到 29.67 ms,比 CoTracker3 快约 7 倍,比此前最快的方法 Track-On 快 2 倍。
* 准确性: 尽管速度大幅提升,但在 STIR 和 SuPer 数据集上仍保持了极具竞争力的追踪精度。
* 消融研究: 作者证明,如果使用过多的细化步骤,EMA 流初始化反而会降低性能,这证实了其初始化已足够精确,进一步的迭代不仅多余,甚至有害。
与其他领域的同构性
LiteTracker 分析:低延迟组织追踪
背景与动机
在机器人手术和扩展现实(XR)背景下,实时追踪软组织运动是一项基本挑战。与刚性物体不同,生物组织会经历复杂的非刚性形变、自遮挡和快速视角变化。现有的 SOTA 方法(如 CoTracker3)依赖于滑动窗口架构,通过一次处理多帧来保持高精度。虽然有效,但该方法引入了显著的计算延迟,使其不适用于实时手术环境。本文作者旨在弥合高精度长期追踪与术中应用严格低延迟要求之间的差距。
核心问题与数学解决方案
作者发现现有模型的主要瓶颈在于滑动窗口内特征的冗余重计算以及对计算密集型迭代细化模块的依赖。
为此,他们引入了两项关键优化:
1. 时间记忆缓冲区: 通过容量为 $T_B = 16$ 的环形缓冲区缓存相关性特征,系统能够通过重用先前计算的数据执行逐帧追踪,有效降低了计算负载。
2. EMA 流初始化: 通过定义流 $F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$($\alpha = 0.8$),他们能够将新帧的初始位置预测为 $P_t^{\text{init}} = P_{t-1} + F_t$。这提供了一个稳健的起点,使模型能在单次传递($L=1$)中实现高精度,大幅缩短了推理时间。
结构骨架
一种用缓存的时间记忆和基于预测的运动初始化来替代冗余迭代计算,从而实现实时状态估计的机制。