LiteTracker: Использование временной причинности для точного отслеживания тканей с низкой задержкой
Задача отслеживания тканей в эндоскопических видеопотоках обусловлена необходимостью хирургической навигации и систем расширенной реальности (XR) для поддержания стабильной привязки к деформируемым, нежестким...
Общие сведения и академический контекст
Задача отслеживания тканей в эндоскопических видеопотоках обусловлена необходимостью хирургической навигации и систем расширенной реальности (XR) для поддержания стабильной привязки к деформируемым, нежестким биологическим поверхностям. Исторически эта область развивалась от общего «отслеживания точек» в компьютерном зрении (например, классический подход Particle Videos) до специализированных медицинских приложений, где основной проблемой является критическая необходимость обеспечения как экстремальной точности, так и сверхнизкой задержки.
Фундаментальной «болевой точкой» предыдущих SOTA-моделей, таких как CoTracker3, является их зависимость от обработки методом скользящего окна (sliding-window processing). Эти модели требуют накопления нескольких кадров («окна») перед выводом прогноза. В хирургических условиях это создает значительную искусственную задержку — зачастую превышающую 200 мс, — что неприемлемо для роботизированной обратной связи в реальном времени или наложений дополненной реальности. Более того, модули итеративного уточнения (iterative refinement) в этих моделях вычислительно затратны, что приводит к линейному росту времени выполнения, препятствующему высокоскоростному покадровому отслеживанию.
Интуитивно понятные доменные термины
- Sliding-Window Processing: Представьте, что вы пытаетесь понять разговор, ожидая, пока человек закончит целое предложение из 16 слов, прежде чем вам будет позволено обработать каждое из них. Вы всегда отстаете на 16 слов. LiteTracker меняет это на «живой» поток, где каждое слово обрабатывается по мере произнесения.
- Temporal Memory Buffer: Это своего рода «блокнот кратковременной памяти». Вместо того чтобы заново вычислять сложные математические операции для каждого нового кадра, система записывает важные результаты предыдущих кадров в блокнот (буфер) и просто обращается к ним при необходимости, экономя огромное количество времени.
- Exponential Moving Average (EMA) Flow: Это похоже на прогнозирование положения автомобиля на основе его недавней скорости и направления. Вместо случайных догадок используется взвешенное среднее прошлых перемещений для формирования точного и быстрого прогноза о положении в следующий момент времени, что позволяет избежать медленных итеративных коррекций.
- Non-rigid Deformations: В отличие от жесткого объекта (например, стола), ткани растягиваются, складываются и сжимаются. Отслеживание их подобно попытке удержать конкретную точку на куске ткани, которую постоянно тянут и скручивают хирургические инструменты.
Таблица обозначений
| Обозначение | Описание |
|---|---|
| $I_t$ | Видеокадр в момент времени $t$ |
| $Q$ | Набор запросных точек (query points) для отслеживания |
| $V_t$ | Прогнозируемый показатель видимости в момент времени $t$ ($V_t \in [0, 1]$) |
| $C_t$ | Прогнозируемый показатель уверенности в момент времени $t$ ($C_t \in [0, 1]$) |
| $P_t$ | Прогнозируемые 2D-координаты $(x, y)$ точки в момент времени $t$ |
| $T_W$ | Размер окна (количество кадров, обрабатываемых совместно) |
| $S$ | Шаг (количество кадров, пропускаемых между обработками) |
| $T_B$ | Емкость буфера временной памяти |
| $F_t$ | Вектор потока экспоненциального скользящего среднего |
| $\alpha$ | Коэффициент временного сглаживания для EMA flow |
Математическая интерпретация
Авторы решили проблему задержки, заменив тяжелую архитектуру скользящего окна покадровым подходом, поддерживаемым буфером временной памяти. Для поддержания точности без использования исходного итеративного уточнения была внедрена стратегия интеллектуальной инициализации.
Основой инициализации является EMA flow, определяемый как:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
Это уравнение вычисляет вектор движения $F_t$ путем смешивания самого недавнего перемещения $(P_{t-1} - P_{t-2})$ с историческим трендом $F_{t-1}$. Установка $\alpha = 0.8$ позволяет модели придавать больший вес недавнему движению, что обеспечивает прогнозирование следующего положения $P_t^{\text{init}}$ с высокой точностью:
$$P_t^{\text{init}} = P_{t-1} + F_t$$
Предоставляя эту точную отправную точку, модель достигает сходимости за один проход ($L=1$), эффективно устраняя необходимость в вычислительно дорогих итеративных циклах, характерных для предыдущих моделей. Буфер временной памяти гарантирует, что «тяжелая работа» по извлечению признаков не повторяется, так как система просто извлекает кэшированные корреляционные признаки из кольцевого буфера.
Определение проблемы и ограничения
Формулировка основной проблемы и дилемма
Отправная точка и целевое состояние
Входными данными системы является непрерывный эндоскопический видеопоток, а целью — выполнение «долгосрочного отслеживания точек» (long-term point tracking), то есть сопровождение специфических анатомических ориентиров или точек ткани на протяжении множества кадров. Желаемый результат — точные координаты $(x_t, y_t)$ этих точек, а также показатели их видимости и уверенности в реальном времени. Недостающим звеном является способность поддерживать высокую точность отслеживания (которая обычно требует обработки тяжелого контекста нескольких кадров) при одновременном соблюдении строгих требований к низкой задержке в условиях операционной.
Фундаментальная дилемма
Авторы сталкиваются с классическим компромиссом между временным контекстом и вычислительной задержкой. Для точного отслеживания тканей в сложных хирургических сценах, характеризующихся нежесткими деформациями, окклюзиями инструментами и быстрыми движениями камеры, современные модели (например, предшественник CoTracker3) полагаются на обработку «скользящим окном». Это означает, что алгоритм должен буферизировать последовательность кадров (например, 16 кадров) и выполнять несколько итеративных шагов уточнения для сходимости к точному положению. Это создает период «ожидания», неприемлемый для хирургической робототехники или XR-приложений, где каждая миллисекунда задержки может привести к рассинхронизации цифрового наложения и физической ткани.
Математическая интерпретация решения
Чтобы преодолеть этот разрыв, авторы внедрили две основные оптимизации, не требующие обучения (training-free), которые позволяют избежать тяжелых избыточных вычислений.
1. Буфер временной памяти (эффективное повторное использование признаков)
Вместо повторной обработки всего скользящего окна для каждого нового кадра авторы реализовали кольцевой буфер с емкостью $T_B = 16$. Этот буфер кэширует «корреляционные признаки» — наиболее вычислительно затратную часть конвейера, включающую попарные измерения сходства. Храня их, система избегает избыточных вычислений, что позволяет осуществлять покадровую обработку, а не ждать полного шага окна.
2. Инициализация EMA Flow
Чтобы исключить необходимость в нескольких шагах итеративного уточнения (ранее требовавшихся для «поиска» точки), авторы внедрили стратегию инициализации на основе движения. Они используют EMA flow, $F_t$, для прогнозирования положения точки до того, как модуль уточнения начнет работу:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
где $P_t$ — положение точки, а $\alpha$ — коэффициент сглаживания (эмпирически установленный на 0.8). Это позволяет модели вычислить начальное положение для нового кадра как:
$$P^{\text{init}}_t = P_{t-1} + F_t$$
Предоставляя это высокоточное «предположение» трансформеру, модель достигает сходимости за один проход ($L := 1$) через модуль уточнения. Это эффективно снижает вычислительную стоимость итеративного цикла, что является значительным прорывом в уменьшении задержки.
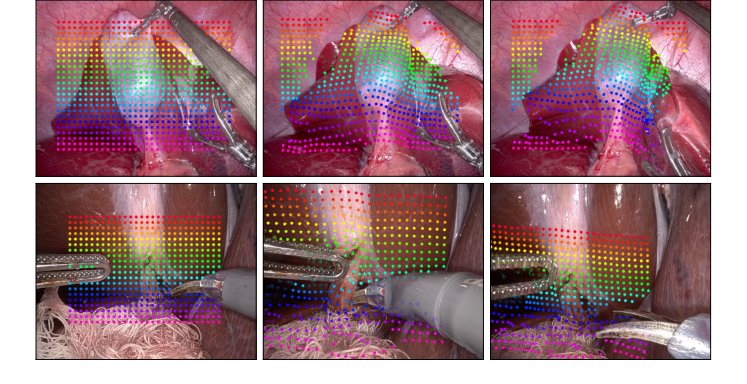 Figure 3. Qualitative results on video samples from the STIR Challenge 2024 [16] (top) and StereoMIS [7] (bottom) datasets. LiteTracker shows high tissue-tracking accuracy and occlusion handling under challenging deformations, tool interactions and perspec- tive changes
Figure 3. Qualitative results on video samples from the STIR Challenge 2024 [16] (top) and StereoMIS [7] (bottom) datasets. LiteTracker shows high tissue-tracking accuracy and occlusion handling under challenging deformations, tool interactions and perspec- tive changes
Почему именно этот подход
Неизбежность выбора
Авторы LiteTracker выявили фундаментальное «узкое место» в современном хирургическом отслеживании: компромисс между высокой точностью трансформерных долгосрочных трекеров (таких как CoTracker3) и строгими требованиями к низкой задержке в условиях реальной операционной. Традиционные SOTA-методы, будучи надежными, полагаются на обработку скользящим окном, которая вынуждает систему ждать буфер кадров (например, 16 кадров) перед выводом результата. Это вносит значительную «неявную задержку», неприемлемую для хирургической робототехники, где даже задержка в несколько сотен миллисекунд может поставить под угрозу безопасность.
Сравнительное преимущество
LiteTracker качественно превосходит аналоги, поскольку меняет парадигму с пакетной обработки на основе окон на покадровый подход, не жертвуя при этом временным контекстом, который делает трансформерные модели эффективными.
- Структурное преимущество: Реализуя буфер временной памяти (кольцевой буфер с емкостью $T_B = 16$), авторы избегают избыточного пересчета дорогостоящих корреляционных признаков. Это снижает вычислительные затраты с $O(N \cdot T_W)$ до более эффективного обновления для каждого кадра, где $N$ — количество точек, а $T_W$ — размер окна.
- Эффективность: Метод достигает задержки вывода в $29.67$ мс, что примерно в $7$ раз быстрее, чем CoTracker3, и в $2$ раза быстрее, чем предыдущий самый быстрый метод, Track-On. С учетом неявной задержки накопления скользящего окна, общее улучшение задержки по сравнению с CoTracker3 составляет примерно $16.6$ раз.
Математический и логический механизм
Математический движок: EMA Flow
Ключевой математической инновацией, позволяющей LiteTracker достигать высокой скорости и низкой задержки без необходимости в вычислительно затратном итеративном уточнении, является инициализация EMA Flow.
Основное уравнение, управляющее этим механизмом:
$$F_t = \alpha(P_{t-1} - P_{t-2}) + (1 - \alpha)F_{t-1}$$
Разбор уравнения
- $F_t$: Прогнозируемый вектор движения (поток) для текущего кадра $t$. Он представляет собой смещение точки из положения в момент $t-1$ в оценочное положение в момент $t$.
- $\alpha$: Коэффициент временного сглаживания (установлен на $0.8$). Он действует как «вес памяти», определяя, насколько модель доверяет самому недавнему наблюдаемому движению по сравнению с историческим трендом.
- $(P_{t-1} - P_{t-2})$: Этот член вычисляет мгновенную скорость точки между двумя предыдущими кадрами. Он задает «текущее» направление движения ткани.
- $F_{t-1}$: Ранее вычисленный вектор потока. Включая его, автор обеспечивает поддержание моделью последовательной траектории, действуя как инерционный член в физике, который предотвращает дрожание отслеживания из-за шума.
Результаты, ограничения и заключение
Анализ LiteTracker: отслеживание хирургических тканей в реальном времени
Авторы LiteTracker решили проблему задержки, трансформировав тяжелый, итеративный, оконный процесс в оптимизированный, однопроходный, покадровый процесс. Они достигли этого путем кэширования дорогостоящих признаков в кольцевом буфере и использования простой, элегантной математической эвристики (EMA flow) для инициализации положений точек.
Экспериментальная валидация
Авторы провели жесткое тестирование своей архитектуры на базовых моделях, таких как CoTracker3, Track-On и различных вариантах MFT. Доказательства убедительны:
* Скорость: LiteTracker достиг задержки вывода в 29.67 мс, что примерно в 7 раз быстрее, чем CoTracker3, и в 2 раза быстрее, чем предыдущий самый быстрый метод, Track-On.
* Точность: Несмотря на значительное ускорение, модель сохранила конкурентоспособную точность отслеживания на наборах данных STIR и SuPer.
* Абляционные исследования: Авторы доказали, что их инициализация EMA flow фактически снижает производительность, если используется слишком много шагов уточнения, подтверждая, что их инициализация настолько точна, что дальнейшие итерации не только излишни, но и вредны.