動的回路のための層状KIK量子誤り緩和
Layered KIK works with mid-circuit measurements & error correction for super reliable quantum computers.
背景と学術的系譜
起源と学術的系譜
本論文で取り上げられる問題は、ノイズの多い中間規模量子(NISQ)時代およびそれ以降における信頼性の高い量子コンピュータ構築という継続的な課題に端を発する。誤り訂正(QEC)は耐故障量子コンピューティングの究極の目標であるが、多大なハードウェアオーバーヘッド、特に量子ビット数の大幅な増加を要求する。これは、現在のおよび近未来のデバイスにとってQECの実用的ではない。
より直接的で実用的な解決策として、量子誤り緩和(QEM)が登場した。QEMは、QECのような広範なハードウェアを必要とせずに、量子計算結果に対するノイズの影響を低減することを目指す。その代わりに、QEMは通常、ランタイムコストを発生させ、所望の精度を達成するために必要な「ショット数」(繰り返し回数)の増加として現れる。しかし、QEM自体もスケーラビリティの問題に直面しており、そのサンプリングオーバーヘッドは回路の規模とともに指数関数的に増加し、約100量子ビットまでの回路への適用を制限している。
多くの初期QEMアプローチにおける重要な「ペインポイント」は、ノイズドリフトに対する感受性であった。デコヒーレンス時間やコヒーレント誤差の大きさなど、量子システムにおけるノイズパラメータは、実験の過程で変動することが多い。QEM手法は実験の実行時間を大幅に増加させる可能性があるため、これらの時間的なノイズドリフトは最終結果を著しく劣化させる可能性がある。特性評価ベースのQEM手法は、ノイズプロファイルを正確に学習することに依存しているため、特に脆弱である。なぜなら、正確な特性評価に必要な時間は、ノイズパラメータがドリフトする速度としばしば衝突するからである。
このことから、アグノスティック(特性評価フリー)なQEM手法、例えばゼロノイズ外挿(ZNE)や適応型KIKプロトコルが開発された。これらは本質的にノイズドリフトに対してより耐性がある。適応型KIK手法は、以前の研究[61]で導入され、ドリフト耐性、非クリフォードゲートへの適用性、および保証された性能限界により、大きな可能性を示した。これは、QECとの統合のための強力な候補として特定され、QECが支配的な局所誤差に対処し、QEMがQECが苦労する残差的、相関的、またはコヒーレント誤差に対処するハイブリッドQEC-QEMアプローチを形成した。
しかし、元の適応型KIKプロトコル(グローバルKIKまたはGKIKと呼ばれる)には、QECおよび動的回路とのシームレスな統合を妨げる2つの根本的な制限があった。
1. 中間回路測定(MCM)との非互換性: MCMは、QECプロトコルにおける症候群測定の実行に不可欠であり、計算中に誤差を検出および訂正することを可能にする。GKIKのグローバルノイズ増幅戦略は、これらの間接的な測定と互換性がなかった。
2. 高次マグナスノイズ項からの残差バイアス: GKIKの定式化は、マグナス展開の高次項を無視しており、特に強いノイズを扱う場合や非常に高い精度が要求される場合に、小さくても有意なバイアスを導入する可能性があった。このバイアスは、不正確な緩和結果につながる可能性がある。
これらの制限により、著者は層状KIK(LKIK)手法を開発することを余儀なくされた。これは、層ベースのノイズ増幅アプローチを採用することでこれらのハードルを克服するように特別に設計されており、動的回路および中間回路測定と互換性があり、高次マグナスノイズ項をより効果的に処理する。
直感的なドメイン用語
-
量子誤り緩和(QEM):
- 直感的なアナロジー: 少しぼやけたカメラで非常に鮮明な写真を撮ろうとしていると想像してください。QEMは、いくつかの写真を撮り、意図的にそれらを制御された方法でさらにぼかすこともあり、その後、特別なコンピュータプログラムを使用してそれらを組み合わせて、完璧に鮮明な写真がどのようであったかを推測することです。カメラのレンズを修理しているわけではありませんが、その欠点にもかかわらず、より良い写真を得ています。
-
量子誤り訂正(QEC):
- 直感的なアナロジー: 3枚の別々の紙に秘密のメッセージを書き、それを3人の異なるメッセンジャーに渡して送ることを考えてください。1人のメッセンジャーが紙を失ったり、それが汚れたりした場合でも、他の2人から元のメッセージを再構築できます。QECは、メッセンジャーの紙が損傷しているかどうかを教えてくれるだけでなく、それを修正または交換するのを助けるシステムのようなもので、メッセージが常に完璧に届くことを保証しますが、より多くのリソース(より多くの紙、より多くのメッセンジャー)が必要です。
-
動的回路:
- 直感的なアナロジー: 前回の味見の結果に次のステップが依存するレシピを考えてください。スープが塩辛すぎる場合(「中間回路測定」の結果)は、水を加えます(特定の「ゲート」操作)。ちょうど良ければ、次の材料に進みます。動的回路は、固定された、事前に決定されたシーケンスに従うのではなく、計算の最中に行われた測定に基づいて、そのパスまたは操作を変更できる量子プログラムです。
-
ノイズドリフト耐性:
- 直感的なアナロジー: 動いているボートの上にまっすぐな線を描こうとしている場合、「ノイズドリフト耐性」とは、あなたの描画技術がボートの絶え間ない、予測不可能な揺れに適応して、それでもまっすぐな線を描くことができることを意味します。ボートを止めたり、その動きを常に再測定したりする必要はありません。変化する条件にもかかわらず、線はまっすぐに保たれます。
-
マグナス展開:
- 直感的なアナロジー: 最初の一撃だけでなく、テーブルのわずかな不完全さ、わずかな空気抵抗、ボールのスピンも考慮して、ビリヤードボールの正確な軌道を予測しようとしていると想像してください。マグナス展開は、これらの不完全さに対するますます微妙な補正を追加することによって、ボールの経路を記述するのに役立つ数学的ツールです。「高次マグナスノイズ項」は、それらの非常に小さく、ほとんど知覚できない効果のようなもので、非常に正確な予測が必要な場合に重要になる可能性があります。
表記表
| 表記 | 説明 |
|---|---|
問題定義と制約
コア問題の定式化とジレンマ
現在の量子コンピューティング実験の状況はノイズに悩まされており、量子回路から得られる期待値にバイアスを導入している。量子誤り緩和(QEM)はこの問題に対処するための実用的な道を提供するが、既存の手法、特にグローバルKIK(GKIK)プロトコルは、その適用性とスケーラビリティを妨げる重大な制限に苦しんでいる。
入力/現在の状態はノイズの多い量子回路によって特徴付けられ、GKIKプロトコルは、ドリフト耐性のような利点にもかかわらず、いくつかの重大な欠陥に苦しんでいる。
* 中間回路測定(MCM)との非互換性: GKIKは「グローバルノイズ増幅」(2ページ)に依存しているため、MCM(5ページ)と根本的に互換性がない。MCMは動的量子回路に不可欠であり、量子誤り訂正(QEC)プロトコルの基盤である。なぜなら、それらは状態を完全にデコヒーアさせる射影測定を含むからである。これらをグローバル折り畳みフレームワーク内で「無限に強いノイズ」として扱うと、射影効果は理想的な動的回路の意図された部分であり緩和されるべきではないため、不正確なノイズ増幅につながる(10ページ)。
* 高次マグナスノイズ項からのバイアス: GKIKの定式化は「高次マグナスノイズ項」(2ページ)を無視しており、「緩和された期待値に小さなバイアス」をもたらす(5ページ)。このバイアスは、強いノイズを扱う場合や「高い精度が必要な場合」(10ページ)に顕著になる。
* ハミルトニアン反転の困難さ: GKIKは「有効ハミルトニアンの符号を反転させる」ことを要求し、これは「特定の量子コンピューティングプラットフォームで実装するのが容易ではない」(9ページ) 。
さらに、QECとの統合を考慮した場合、特性評価ベースのQEM手法は独自のセットの問題に直面する。論理量子ビットは、QECの出力であり、「ごくわずかな」エラー率を示す(5ページ)。これらのごくわずかな誤差を緩和のために特性評価することは「時間のかかる」ものであり、「高精度のノイズ特性評価」を要求する(4〜5ページ)ため、そのような統合は非実用的である。
望ましい終点(出力/目標状態)は、「動的回路」におけるゲート誤差緩和のための「ドリフト耐性がありバイアスフリー」なQEM手法である(9ページ)。具体的には、この手法は以下を満たす必要がある。
* 「中間回路測定と互換性がある」(2ページ、5ページ)。
* 「考慮されていない高次マグナスノイズ項による残差誤差」を効果的に抑制し(2ページ)、強いノイズシナリオでも高い精度を保証する。
* 「量子誤り訂正コードとのシームレスな統合」を可能にし(2ページ)、QECが支配的なノイズを処理し、QEMがQECが苦手とする残差的および相関的誤差に対処できるようにする。
* 元のGKIKプロトコルと比較して「追加のオーバーヘッドや実験的複雑さを伴わずに」これらの改善を達成する(2ページ、9ページ)。
* 層数を調整することにより、残差緩和誤差を「目標実験精度」以下に低減できる。
現在の状態と望ましい終点の間の正確な欠落リンクまたは数学的ギャップは、緩和プロセスを損なうことなく、または過剰なオーバーヘッドを発生させることなく、MCMを統合し、$\Omega_2$バイアスを体系的に処理できるQEMプロトコルの開発にある。本論文は、このギャップを埋めるために「KIKの層ベースの適用」(LKIK)を提案している。数学的には、GKIKの性能は回路全体の2次マグナス項 $\Omega_2^G$ によって制限される(17ページ)。LKIKアプローチは、$\Omega_2$への層間交換子の寄与を排除し、層数を増やすことによって残りの$\Omega_2$寄与を無視できるようにすることを目指し、それによってバイアスフリーな操作を達成する(17ページ)。課題は、MCMの機能を維持し、高次ノイズ項をキャンセルしながら、各層に対してノイズを正しく増幅するようにこの層状アプローチを定式化することである。
この特定の問題を解決しようとする以前の研究者を閉じ込めてきた痛みを伴うトレードオフまたはジレンマは、いくつかの方法で現れる。
1. QEMランタイム vs. ノイズドリフト: 多くのQEMプロトコルは実験の実行時間を大幅に増加させ、それが「時間的ノイズドリフト」(4ページ)の影響を増幅させる。ノイズ特性評価に依存する手法は特に脆弱であり、その特性評価は長い実験実行中に時代遅れになる(4ページ)。
2. 特性評価ベースQEMとのQEC統合: QECとQEMを組み合わせたいという願望は強いが、特性評価ベースQEMは、効率的な学習のために誤差が十分に顕著で構造が単純であることを必要とする。これは、QEC後の論理量子ビットで期待される「ごくわずかな」複雑な誤差と衝突し、「時間のかかる高精度ノイズ特性評価」(4〜5ページ)につながる。これは、QECを改善するとQEM統合がより困難になるというジレンマを生み出す。
3. GKIKのグローバル増幅 vs. 中間回路測定: GKIKのノイズ増幅のグローバルな性質は、MCMの局所的で状態射影的な性質と根本的に矛盾する。MCMは動的回路およびQECの不可欠な部分であるが、GKIKのフレームワークはそれらを正しく処理できず、MCMを反転させるべき回路の一部として扱うと「不正確なノイズ増幅」につながる(10ページ)。これは、GKIKでQEC-QEM統合を達成するための中心的なジレンマである。
4. 精度/ノイズ強度 vs. サンプリングコスト: GKIKで高い精度を達成したり、強いノイズを緩和したりするには、「高次マグナスノイズ項」を考慮する必要がある。しかし、これらの項に対処するために必要なサンプリングコストは「非現実的」になる可能性があり(10ページ)、望ましい性能と実験的実現可能性との間にトレードオフが生じる。
制約と失敗モード
動的回路のための堅牢な量子誤り緩和の問題は、いくつかの過酷で現実的な壁によって「非常に困難」になっている。
-
物理的制約:
- ハミルトニアン反転の複雑さ: GKIK手法は「有効ハミルトニアンの符号を反転させる」ことを要求する(9ページ)。これは普遍的に単純な操作ではなく、特に複雑なゲートやアーキテクチャの場合、さまざまな量子コンピューティングプラットフォームでの実装が困難な場合がある。
- 薄い層のための制御電子機器の速度: LKIKは利点を提供するが、「より薄い層」(つまり、回路を多くの小さなセグメントに分割する)を使用すると、駆動ハミルトニアンの符号変更がより頻繁になるため、「より高速な制御電子機器」が必要になる可能性がある(25ページ)。これは、層の粒度に対するハードウェアの制限となる。
- 薄い層における漏洩ノイズと励起: 「より薄い層」の場合、「漏洩ノイズと非計算状態の励起の可能性が増加する」(25ページ)。これらを緩和するには追加のパルス整形技術が必要であり、実験セットアップの複雑さが増す。
-
計算/サンプリング制約:
- QEMの指数関数的なサンプリングオーバーヘッド: KIKを含むほとんどのQEM手法は、「指数関数的に」回路規模とともに増加する「サンプリングオーバーヘッド」を発生させる(3ページ)。これは、比較的少数の量子ビット(例えば、超伝導量子ビットでは最大100)を持つ回路への適用を制限する。
- 時間のかかるノイズ特性評価: 特性評価ベースのQEM手法は、ノイズパラメータの正確な知識を必要とする。「ごくわずかな」誤差、例えば論理量子ビット上の誤差の場合、これは「時間のかかる高精度ノイズ特性評価」(4〜5ページ)につながり、リアルタイムアプリケーションや大規模回路には非実用的である。
- 高精度に対する非現実的なサンプリングコスト: ノイズが強い場合や「非常に高い精度が必要な場合」、高次マグナスノイズ項を考慮するために必要なサンプリングコストは「非現実的」になる可能性がある(10ページ)。
- ナイーブな層ごとの緩和に対する指数関数的なオーバーヘッド: 各層を独立して緩和する(例えば、各層の緩和された進化演算子を乗算する)単純なアプローチは、「層数とともに指数関数的に増加する」サンプリングオーバーヘッドにつながる(22ページ)。例えば、10層の1次緩和には約100万($2^{20}$)ショットが必要になる場合があり、これはしばしば実行不可能である。
-
データ駆動型制約:
- 時間的ノイズドリフト: 量子プロセッサのノイズパラメータは静的ではなく、「温度変動、迷走電磁場、または2準位系欠陥」(4ページ、6ページ)などの要因により、「通常は時間とともに変動」する。QEM実験は「数十時間以上」実行される可能性があるため、これらのドリフトは緩和の精度に大きく影響する可能性がある(6ページ)。
- 特性評価ベースQEMの要件: 特性評価ベースの手法が効果的であるためには、誤差が「合理的な時間枠内で十分な精度で学習できるほど顕著」であり、「ノイズ構造が少数のパラメータを使用して記述できるほど単純」である必要がある(4〜5ページ)。これらの条件は、特に論理量子ビットの場合、満たされないことが多い。
- ノイズの多い中間回路測定: 実用的な量子システムでは、MCMは「しばしばノイズが多い」ため、「誤ったゲートの実行につながる可能性がある」(15ページ)。これは、対処する必要がある別の層の誤差を導入し、動的回路を複雑にする。
失敗モード(これらの制約が克服されない場合、または以前の手法が使用された場合):
* 性能低下: QEMプロトコルがノイズドリフトに耐性がない場合、最終的な結果は著しく影響を受け、信頼性の低い結果につながる(4ページ)。
* 不正確な結果: ノイズが理想的なユニタリと交換しない場合にゲート挿入などの手法を使用してノイズを増幅すると、「不正確な増幅」とバイアスのある結果につながる(8ページ、20ページ)。
* QEC統合の不可能性: GKIKとMCMとの非互換性は、症候群測定に大きく依存するQECをシームレスに統合できないことを意味し、全体的な誤り抑制能力を制限する(5ページ、10ページ)。
* 達成不可能な精度: GKIKで高次マグナス項を無視すると、非常に高い精度を達成したり、強いノイズを緩和したりすることが、「非現実的」なサンプリングコストを発生させることなく不可能になる(10ページ)。
* スケーラビリティのボトルネック: 多くのQEM手法の指数関数的なサンプリングオーバーヘッドは、対処されない場合、より大きく複雑な量子回路への適用を防ぎ、量子計算のスケーラビリティを制限する(3ページ)。
なぜこのアプローチなのか
選択の必然性
層状KIK(LKIK)アプローチは、以前の量子誤り緩和(QEM)手法、特にこれまで最も有望であったグローバルKIK(GKIK)プロトコルを含む、それらの重要な制限を直接解決することによって、唯一実行可能な解決策として登場する。従来の「最先端」(SOTA)手法、例えば特性評価ベースのQEM(確率的誤りキャンセル、クリフォード回帰、機械学習など)は、時間的ノイズドリフトに固有の感受性があるため、不十分であると見なされた。量子システムにおけるノイズパラメータは通常時間とともに変動し、QEM手法によって発生する実質的なサンプリングオーバーヘッドは、実験が数十時間実行される可能性があることを意味し、これらのドリフトを重大な障害にする(4ページ、6ページ)。さらに、特性評価ベースの手法は、論理量子ビットで期待されるごくわずかなエラー率に苦労し、非現実的に長い特性評価時間と量子誤り訂正(QEC)要件との非互換性につながる(5ページ)。
パルスストレッチングゼロノイズ外挿(ZNE)は、複雑なキャリブレーションを必要とし、コヒーレント誤差を誤ってスケーリングするツイリング技術とは互換性がない。デジタルZNEは、ノイズが理想的なユニタリ演算子と交換しない場合に強い誤差バイアスを被る。NOXは、1次緩和理論であるため、弱いノイズシナリオに限定される(4ページ)。
アグノスティックノイズ増幅手法は、よりドリフト耐性があるものの、重大な欠点も提示した。パルスストレッチングゼロノイズ外挿(ZNE)は、複雑なキャリブレーションを必要とし、コヒーレント誤差を誤ってスケーリングするツイリング技術とは互換性がない。デジタルZNEは、ノイズが理想的なユニタリ演算子と交換しない場合に強い誤差バイアスを被る。NOXは、1次緩和理論であるため、弱いノイズシナリオに限定される(4ページ)。
適応型KIK手法(GKIK)は、ドリフト耐性のあるQEMおよびQEC統合のための強力な候補として特定され、非強いノイズに対する収束保証を提供した。しかし、GKIK自体には、その普遍的な適用性を妨げる2つの重要な固有のハードルがあった。
1. 中間回路測定(MCM)との非互換性: MCMは、QECプロトコルにおける症候群測定の実行に不可欠である。GKIKのグローバル折り畳みアプローチは、MCMを状態を完全にデコヒーアさせる「無限に強いノイズ」として扱い、理想的な動的回路機能を変更せずにそのフレームワーク内で緩和することを不可能にする(5ページ、10ページ)。
2. 高次マグナスノイズ項からの残差バイアス: GKIKは、考慮されていない高次マグナス展開補正による、小さくても実質的なバイアスを示した。このバイアスは、ノイズが強い場合や非常に高い精度が必要な場合に問題となる(5ページ、9ページ、10ページ)。
著者は、KIKの重要なドリフト耐性とアグノスティックな性質を維持しながら、これらの2つの特定のハードルを同時に克服するには、層ベースの適用が必要であると認識した。この認識が層状KIK(LKIK)の開発につながり、これはこれらの問題を解決し、真にドリフト耐性がありバイアスフリーなQEC-QEMプロトコルへの道を開くように明示的に設計されている(9ページ)。
比較優位性
層状KIK(LKIK)は、主にその強化されたバイアス抑制と動的回路との固有の互換性により、グローバルKIK(GKIK)を含む以前の手法に対して質的な優位性を提供する。
第一に、LKIKはバイアス抑制を大幅に改善する。GKIKは効果的であったが、高次マグナスノイズ項による残差バイアスに苦しんでいた(5ページ、10ページ)。LKIKは、回路を層に分割し、KIK増幅を層ごとに適用することにより、これらの高次補正を体系的に抑制する。分析によると、層間交換子からの寄与(図2の四角い領域で表される)が排除され、層固有の2次マグナス項(図2の青い三角形)は層数($L$)が増加するにつれて無視できるようになる(17ページ、18ページ)。これにより、実質的に「バイアスフリー」な手法となり、任意の目標精度に対して、十分な大きさの$L$を選択することで残差バイアスを目標実験精度以下に低減できることを意味する(18ページ)。定量的に、薄い層の場合、残差誤差は$1/L^2$でスケールし(19ページ、図3)、これは誤差低減における優れた構造的利点を示す、$1/L$の粗い上限よりも「大幅に速い」。
第二に、LKIKの設計は、中間回路測定(MCM)および動的回路を固有にサポートしており、GKIKに対する重要な構造的利点である。GKIKのグローバル折り畳みアプローチは、MCMと互換性がなかった。なぜなら、MCMはグローバルに反転または増幅できない射影操作を表し、理想的な回路を破損するからである(10ページ)。LKIKは、MCMを層状緩和フレームワーク内でスケールされていない関数として扱うことによってこれを克服する。これにより、MCMは緩和なしで組み込むことができ、動的回路内での理想的な機能を維持する(15ページ、式22、23、図4)。動的回路、特にQECコードはMCMに大きく依存しているため、これは重要な区別である。
最後に、LKIKは元のKIKプロトコルからのドリフト耐性という主要な利点を維持している。これは、デコヒーレンス時間やコヒーレント誤差の変化など、ノイズパラメータの時間的変動を、性能低下なしに処理できることを意味する(4ページ、8ページ)。これは、特性評価ベースのQEM手法に対する重大な質的利点であり、それらは本質的にそのようなドリフトに敏感である(4ページ、6ページ)。ドリフト耐性、バイアスフリー操作、およびMCM互換性の組み合わせにより、LKIKはQEMをQECと統合し、NISQ時代の動的回路全般にわたって圧倒的に優れたものとなる。
制約との整合性
層状KIK(LKIK)手法は、動的回路のための堅牢な量子誤り緩和という厳しい要件に完全に整合し、問題の制約と解決策の独自の特性を効果的に結びつけている。
-
動的回路および中間回路測定(MCM)との互換性: 主要な制約は、QECに不可欠なMCMを含むあらゆる動的回路に適用可能なQEM手法を開発することであった。GKIKは、そのグローバル折り畳みアプローチのためにここで失敗した(5ページ、10ページ)。LKIKの層ベース増幅スキームはこれを直接解決する。KIK増幅を個々の層に適用することにより、MCMは緩和されないスケールされていない操作として組み込むことができ、動的回路内での理想的な機能を維持する(15ページ、式22、23)。これは、数値シミュレーションがLKIKがユニタリ進化とMCMおよびフィードフォワードを備えた動的回路の両方で同等にうまく機能することを示す(図4、21ページ)ように、重要な適合である。
-
ドリフト耐性: QEMプロトコルにとって重要な望ましい機能は、ノイズパラメータが実験中に変動するノイズドリフトに対する耐性である(4ページ)。LKIKは、この重要な特性をKIKプロトコルから継承している。実験の実行順序は、時間的ノイズドリフト効果を排除するように特別に構造化されており、ノイズパラメータが変動しても手法の性能が低下しないことを保証する(8ページ、9ページ)。これは、ドリフトする実際の量子ハードウェアで確実に動作するという制約に直接対処する。
-
高次ノイズ項の緩和とバイアスフリー操作: 高精度QEMの重要な制約は、GKIKを悩ませた高次ノイズ項からの残差誤差の存在である(5ページ、10ページ)。LKIKの層ベースアプローチは、これらの項を体系的に抑制する。層間交換子からの寄与を排除し、十分な数の層で層固有の2次マグナス項を無視できるようにすることにより、LKIKは実質的に「バイアスフリー」な緩和を達成する(17ページ、18ページ)。残差誤差は薄い層に対して$1/L^2$でスケールし、層数を適切に選択することで、緩和誤差を任意の目標実験精度以下に低減できることを保証する(19ページ)。これは、強いノイズが存在する場合でも高精度緩和の必要性に直接対処する。
-
量子誤り訂正(QEC)とのシームレスな統合: 全体的な目標は、不完全なQECを受けている回路に対して、信頼性が高くドリフト耐性のある誤り緩和を可能にすることであった(3ページ)。QECコードは動的回路のインスタンスであるため、LKIKの動的回路およびMCMとの互換性により、QECとのシームレスな統合が可能になる。これにより、QECは支配的な局所的、非相関的誤差を処理でき、LKIKはQECにとって困難な残差的、漏洩的、相関的、およびコヒーレント誤差を抑制できる(3ページ、15ページ)。この相乗効果は、量子コンピューティング実験の信頼性を向上させるというビジョンに完全に整合する、堅牢なハイブリッドアプローチを提供する。
代替案の却下
本論文は、動的回路、ドリフト耐性、および高精度要件の文脈で、それらの根本的な制限を強調することにより、他の一般的なQEMアプローチを却下する明確な理由を提供する。
-
特性評価ベースQEM手法(例:PEC、PEA、クリフォード回帰、機械学習): これらの手法は、「時間的ノイズドリフトに対する固有の感受性」(4ページ、6ページ)のために明示的に却下された。量子システムにおけるノイズパラメータは静的ではなく、QEM実験の長い実行時間中に大幅に変動する可能性があり、学習されたノイズモデルがすぐに時代遅れになるため、特性評価ベースのアプローチは信頼性が低い。さらに、これらの手法を、誤差がごくわずかであると予想される論理量子ビットに適用すると、「時間のかかる高精度ノイズ特性評価」が必要になり、非実用的になる(5ページ)。また、これらの特性評価要件のためにQEC統合に課題をもたらす。
-
ゼロノイズ外挿(ZNE)手法(例:パルスストレッチングZNE、デジタルZNE、NOX):
- パルスストレッチングZNEは、「慎重な制御とキャリブレーション手順を必要とし」、「パルスストレッチングがコヒーレント誤差を誤ってスケーリングするため、ツイリング技術とも完全には互換性がない」(4ページ)ため、問題があると考えられた。これは、実用的な適用性と特定のノイズタイプに対する有効性を制限する。
- デジタルZNEは、「ノイズが理想的なユニタリ演算子と交換しない場合、任意の緩和次数で強い誤差バイアスを被る。これは通常の場合である」(4ページ)。本論文は、「デジタルノイズ増幅は、ノイズが理想的なゲートと交換するというまれなケースでのみ正しい」(7ページ)と明示的に述べており、一般的に不適切である。
- NOXは、高精度または強いノイズシナリオでは、「1次緩和理論であるため、弱いノイズシナリオに限定される」(4ページ)ため、却下された。
-
精製手法: これらのアプローチは検討されたが、「ハードウェアオーバーヘッドを伴い、限定的なノイズモデルに限定される」(6ページ)ため、却下された。目標は、追加のハードウェアオーバーヘッドがなく、より広範な適用性を持つ手法であった。
-
グローバルKIK(GKIK): GKIKはドリフト耐性のあるQEMの強力な候補であったが、2つの重大な欠陥のために最終的な解決策としては最終的に却下された(5ページ、9ページ、10ページ)。
- 中間回路測定(MCM)との非互換性: GKIKのグローバル折り畳みメカニズムは、動的回路およびQEC症候群測定に不可欠なMCMを正しく処理できない。MCMは、理想的な回路を破損することなくグローバル折り畳みフレームワーク内で記述できない「無限に強いノイズ」として機能する(10ページ)。
- 高次マグナスノイズ項からの残差バイアス: GKIKは、強いノイズや非常に高い精度が必要な場合に顕著になった、小さくても持続的なバイアスを示した(10ページ)。この制限は、真にバイアスフリーな緩和を達成できないことを意味した。
層状KIKアプローチは、これらの特定されたすべての既存の代替案の欠点を克服するために特別に開発され、追加のハードウェアオーバーヘッドなしに、ドリフト耐性があり、バイアスフリーで、動的回路互換性のあるQEMソリューションを提供する。
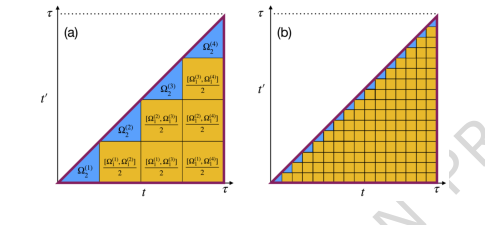 Figure 2. Local contributions to the global Ω2. (a) & (b) The performance of the global KIK introduced in [61] is limited by the second-order Magnus term of the entire circuit, ΩG 2 . ΩG 2 is calculated using a double integral whose inte- gration domain is depicted by the big triangle in (a). τ is the time duration of the unmitigated circuit. The same circuit can be described as a sequence of L consecutive layers (L = 4 in (a)). As a result, ΩG 2 can be divided into two different types of contributions: i) the blue triangles that arise from the Ω2 of each layer, and ii) the orange squares which originate from the Ω1 commutator of different layers. Crucially, we show that in the layered KIK protocol, the contribution of the squares is eliminated, leaving only the blue triangles con- tribution. Furthermore, as the layers get thinner (b), the contribution of the blue triangles becomes negligible. From this argument one can derive an upper bound on the LKIK mitigation error that scales as 1/L. Interestingly, when the layers are sufficiently thin, we find a tighter error bound that scales as 1/L2. As such, LKIK is bias-free in practice, since it is always possible to choose a sufficiently large L that guarantees that the residual mitigation error remains below the target experimental accuracy
Figure 2. Local contributions to the global Ω2. (a) & (b) The performance of the global KIK introduced in [61] is limited by the second-order Magnus term of the entire circuit, ΩG 2 . ΩG 2 is calculated using a double integral whose inte- gration domain is depicted by the big triangle in (a). τ is the time duration of the unmitigated circuit. The same circuit can be described as a sequence of L consecutive layers (L = 4 in (a)). As a result, ΩG 2 can be divided into two different types of contributions: i) the blue triangles that arise from the Ω2 of each layer, and ii) the orange squares which originate from the Ω1 commutator of different layers. Crucially, we show that in the layered KIK protocol, the contribution of the squares is eliminated, leaving only the blue triangles con- tribution. Furthermore, as the layers get thinner (b), the contribution of the blue triangles becomes negligible. From this argument one can derive an upper bound on the LKIK mitigation error that scales as 1/L. Interestingly, when the layers are sufficiently thin, we find a tighter error bound that scales as 1/L2. As such, LKIK is bias-free in practice, since it is always possible to choose a sufficiently large L that guarantees that the residual mitigation error remains below the target experimental accuracy
数学的・論理的メカニズム
マスター方程式
本論文で提示されている層状KIK(LKIK)量子誤り緩和手法のコア数学的エンジンは、増幅されたノイズのある回路の線形結合を構築することによって緩和された進化演算子を構築することを中心に展開している。$L$層および緩和次数$M$までのLKIK緩和進化演算子の中心方程式は次のように与えられる。
$$ K_{\text{mit,LKIK}}^{(M)} = \sum_{j=0}^M a_j^{(M)} \prod_{l=1}^L K_l(K_l^I K_l)^j $$
この緩和された演算子が構築されたら、初期状態$\rho_0$における観測量$A$の最終的な緩和期待値は次のように得られる。
$$ A_{\text{mit}}^{(M)} = \sum_{j=0}^M a_j^{(M)} \langle A | \left( \prod_{l=1}^L K_l(K_l^I K_l)^j \right) | \rho_0 \rangle $$
項ごとの剖検
これらの式を分解して、各コンポーネントを理解しよう。
-
$K_{\text{mit,LKIK}}^{(M)}$:これは層状KIK緩和進化演算子であり、次数$M$である。
- 数学的定義:増幅されたノイズのある層演算子の積の線形結合である。
- 物理的/論理的役割:この演算子は、LKIK緩和プロトコルを適用した後の、理想的でノイズのない進化演算子$U$の最良の推定値を表す。その目標は、量子回路に存在するノイズを効果的に「元に戻す」ことである。
- なぜ総和なのか:総和は、ノイズチャネルの逆の多項式近似を形成するために使用される。総和の各項は、より高次の補正に寄与し、$M$が増加するにつれて、より正確な緩和を可能にする。
-
$M$:これは緩和次数を表す。
- 数学的定義:線形結合に含まれるノイズ増幅の最高次数を表す整数。
- 物理的/論理的役割:より高い$M$は、逆ノイズのより洗練された多項式近似を意味し、より良い誤り緩和につながる可能性があるが、サンプリングオーバーヘッドも増加する。
-
$a_j^{(M)}$:これらは線形結合の係数である。
- 数学的定義:実数であり、通常はテイラー展開(式(4)のテイラー係数)から導出されるか、L2ノルムを最小化することによって適応的に決定される([61]で言及されている適応係数)。
- 物理的/論理的役割:これらの係数は、増幅されたノイズのある回路の線形結合が理想的なノイズのない進化を効果的に近似することを保証するために重要である。それらは、ある次数までのノイズ項をキャンセルするように設計されている。本論文は主にテイラー係数に焦点を当てており、これらは解析的に導出され、学習されない。
- なぜ加算なのか:係数は線形結合を形成するため、多項式近似の数学的構造である。
-
$\prod_{l=1}^L$:これは層の積を表す。
- 数学的定義:演算子の逐次的な構成であり、$l=1$から$L$まで順序付けられている。
- 物理的/論理的役割:これは、量子回路が$L$個の異なる、重複しない「層」に分割されていることを意味する。全体の回路進化は、これらの層の進化の逐次的な適用である。積は、量子力学において不可欠な操作の時間順序が尊重されることを保証する。
-
$K_l$:これは層$l$のノイズのある進化演算子である。
- 数学的定義:第$l$層の実際の不完全な量子進化を、理想的なユニタリ操作とノイズの両方を含むように記述する演算子(リウビル空間)。
- 物理的/論理的役割:これはノイズのある回路の基本的な構成要素である。緩和しようとしているのは、このノイズである。
-
$K_l^I$:これは$K_l$のパルス逆である。
- 数学的定義:層$l$の効果的な相互作用ハミルトニアンのスケジュールを反転させ、その符号を反転させることによって得られる演算子。
- 物理的/論理的役割:パルス逆はKIKプロトコルの重要なコンポーネントである。これは、$K_l$の理想的な部分を「元に戻す」ように設計されており、同時にノイズを制御された方法で維持または増幅する。これにより、ノイズ増幅回路を構築できる。
-
$(K_l^I K_l)^j$:この項は、層$l$の増幅されたノイズを増幅係数$j$で表す。
- 数学的定義:演算子$K_l^I K_l$を$j$回適用したもの。
- 物理的/論理的役割:積$K_l^I K_l$は、その理想的な部分が恒等であり、ノイズのある部分は増幅されるように設計されている。これを$j$回繰り返すことで、ノイズがさらに増幅される。この制御された増幅は、ノイズ増幅ベースの誤り緩和の核心的なアイデアである。
-
$\langle A | \cdot | \rho_0 \rangle$:これは期待値を表す。
- 数学的定義:リウビル空間では、演算子$O$に対して、期待値は$\text{Tr}[A \cdot O(\rho_0)]$であり、$A$は観測量、$\rho_0$は初期状態である。$\langle A | O | \rho_0 \rangle$という表記は、これを表すコンパクトな方法である。
- 物理的/論理的役割:これは量子実験における最終的な関心事である測定の平均値である。緩和の目標は、この値を理想的でノイズのない期待値にできるだけ近づけることである。
ステップバイステップフロー
量子計算を複雑な機械と見なし、LKIKを洗練された修理および校正プロセスと見なしてください。このメカニズムを通じて単一の抽象データポイント(量子状態を表す)がどのように流れるかを以下に示します。
-
回路の分解: まず、目的の計算を実行するが本質的にノイズのある元の完全な量子回路が、概念的に$L$個のより小さな、逐次的な「層」に分解されます($K_1, K_2, \dots, K_L$)。各層$K_l$自体はノイズのある操作です。
-
層固有のノイズ増幅: 各個々の層$K_l$について、プロトコルは一連の「増幅された」バージョンを生成します。これには、特殊な「パルス逆」回路$K_l^I$を作成することが含まれ、これは$K_l$の理想的な部分を効果的に逆転させるように設計されています。次に、各層$l$および様々な増幅係数$j$($0$から$M$まで)について、ノイズ増幅ブロック$(K_l^I K_l)^j$が構築されます。$j=0$の場合、このブロックは単なる恒等です。$j=1$の場合、$K_l^I K_l$となります。
-
増幅された完全回路への再構築: 次に、各緩和次数$j$について、完全な、フルレングスの量子回路が再構築されます。この再構築された回路は、各層$l$について、元のノイズのある層$K_l$とそのノイズ増幅ブロック$(K_l^I K_l)^j$を連結することによって形成されます。特定の$j$に対する完全回路は、$K_L(K_L^I K_L)^j \dots K_2(K_2^I K_2)^j K_1(K_1^I K_1)^j$のように見えます。このプロセスにより、$M+1$個の異なる完全回路が生成され、それぞれがすべての層にわたって異なるレベルのノイズ増幅が行われます。
-
実行と測定: これらの特別に構築された$M+1$個の回路のそれぞれが、初期状態$\rho_0$から開始して、量子コンピュータ上で実行されます。各実行について、観測量$A$の期待値が測定されます。これにより、一連の生の、ノイズのある期待値、$A_0^{\text{raw}}, A_1^{\text{raw}}, \dots, A_M^{\text{raw}}$が得られます。
-
後処理(線形結合): 最後に、これらの生の期待値が古典コンピュータに入力されます。ここで、事前に決定された係数セット$a_j^{(M)}$を使用して結合されます。最終的な緩和期待値$A_{\text{mit}}^{(M)}$は、加重合計として計算されます:$A_{\text{mit}}^{(M)} = \sum_{j=0}^M a_j^{(M)} A_j^{\text{raw}}$。この線形結合はフィルターとして機能し、増幅されたノイズ項をキャンセルして、真のノイズのない期待値のより良い推定値を提供します。
最適化ダイナミクス
層状KIK(LKIK)における「最適化」は、典型的な機械学習の意味での連続的な反復学習プロセスではなく、収束とバイアス低減のために設計された戦略的な構築と後処理スキームです。
-
ノイズ反転のための多項式近似: 基本的な考え方は、ノイズチャネルの逆、$N^{-1}$を多項式展開を使用して近似することです。係数$a_j^{(M)}$は、線形結合$\sum_{j=0}^M a_j^{(M)} N^{2j}$が$N^{-1}$を効果的に近似するように選択されます。本論文の範囲では、これらの係数は主にテイラー係数であり、解析的に導出されます(式4)。したがって、これらの係数の「学習」または反復更新は、この特定の作業内では行われません。係数は、緩和次数$M$が選択されると固定されます。
-
緩和次数($M$)による収束: 緩和の精度は、緩和次数$M$が増加するにつれて向上します。より高い$M$は、逆ノイズチャネルのより高次の多項式近似を意味し、より複雑または高次のノイズ項をキャンセルできます。これにより、より正確な緩和期待値が得られ、理想的な値に収束します。しかし、$M$を増やすと、より多くの回路を実行する必要があるため、サンプリングオーバーヘッドも増加します。
-
層化($L$)によるバイアス低減: LKIKの重要な革新は、回路を$L$個の層に分割することによって残差バイアスを大幅に低減できる能力です。本論文は、2次マグナス項$\Omega_2$に関連する主要なバイアス項が、十分に薄い層の場合、$1/L^2$でスケールすることを示しています(式34)。これは、回路をより多くの層に分割すると、緩和手法自体の固有のバイアスが任意に小さくなり、実質的にLKIKを「バイアスフリー」にすることを意味します。これは、Mを増やすこととは異なる重要な収束メカニズムです。
-
ドリフト耐性メカニズム: プロトコルは、時間的ノイズドリフトに対して耐性があるように設計されています。これは、実験の実行中に測定ショットの総数を複数のセットに分割するように実験を構造化することによって達成されます。各セット内で、すべての増幅された$M+1$個の回路(特定の$M$に対して)が実行されます。これにより、実験中に発生するノイズドリフトが、各セット内のすべての回路に同様に影響することが保証されます。後処理ステップの線形結合(総和)は、この共通のドリフト誘発バイアスを各セットから効果的にキャンセルします。多くのそのようなセットにわたる緩和された結果の平均化は、分散をさらに低減し、堅牢でドリフト耐性のある結果につながります。これは、それを特性評価する必要なしに時間変化するノイズを処理するための巧妙な方法です。
要するに、LKIKメカニズムは、逆関数を近似するように係数が事前に計算され、近似の次数($M$)を増やし、回路層化($L$)によって固有のバイアスを低減することによって「収束」するという意味で「学習」します。手法の堅牢性は、反復最適化ではなく、その実行プロトコルの構造的特性である固有のドリフト耐性によってさらに強化されます。
結果、制限、および結論
実験設計とベースライン
著者は、主に数値シミュレーションを通じて、層状KIK(LKIK)アプローチを厳密に検証しました。以前の量子誤り緩和(QEM)手法の特定の側面に関する補足的な実験作業への参照も含まれています。数学的主張を証明するための中心的な実験アーキテクチャは、グローバルKIK(GKIK)手法と比較することを含んでおり、これは主要なベースラインとして機能します。
主な比較のために、図1に示すように、4量子ビットシミュレーションが採用されました。実験は、緩和された期待値と理想値との差$\Delta(A)$を、緩和次数$M$に対してプロットして測定するように設計されました。次数$M=0$は緩和なしを表しました。2つのノイズ強度パラメータがテストされました:より弱いノイズシナリオ($\xi = 0.02$)とより強いノイズシナリオ($\xi = 0.2$)。理想的な期待値は約$0.025$に設定されました。この比較の「犠牲者」は、GKIK(「1層(GKIK)」として表される)と、層数を変えたLKIK(2、4、10、20層)でした。このセットアップにより、異なるノイズ条件下でのLKIKの層数を増やすことが緩和性能にどのように影響するかを直接比較できました。
残差誤差のスケーリングを具体的に示すために、図3は図1aと同じ4量子ビット回路の数値実験を示しましたが、今回は層数$L$の関数として固定緩和次数(7)の誤差をプロットしました。これは、薄い層に対する$1/L^2$誤差依存性という理論的予測を確認するために重要でした。
さらに、本論文は、LKIKの動的回路との互換性に取り組んでおり、これは重要な利点です。図4は、中間回路測定(MCM)およびフィードフォワードを含む動的回路に対するLKIK緩和と、非動的なユニタリ進化回路との比較を示す数値シミュレーションを示しています。両方のシナリオで10層と$\xi = 0.1$のノイズパラメータが使用されました。この実験は、LKIKが複雑な動的設定で同等にうまく機能することを決定的に示すことを目的としていました。これは、GKIKが以前に中間回路測定との非互換性により失敗した場所です。
本論文は主にLKIKの数値証拠と解析的導出に焦点を当てていますが、その「方法」セクションで、KIK原則の基礎となる2つの実験的デモンストレーションを参照しています。補足ノート1は、トラップドイオン量子コンピュータ(IBEX - AQT)での実験を説明しており、$R_{xx}(\pi/2)$ゲート回路で時間的な過回転を人為的に誘発することによってKIK手法のドリフト耐性を実証しました。補足ノート2は、IBM超伝導デバイス(ibm_jakarta)での実験を詳細に説明しており、LKIKが解決を目指す問題であるゲート挿入に起因する不正確なノイズ増幅の問題を検証しました。動的量子回路におけるLKIKの効果的な誤り緩和の実験的検証は、コンパニオン論文[62]で提示されることが明示的に述べられています。
証拠が証明すること
本論文で提示された数値証拠は、層状KIK(LKIK)がグローバルKIK(GKIK)および以前の量子誤り緩和(QEM)スキームのいくつかの重要な制限に対処することに対する優位性について、説得力のある証拠を提供しています。
第一に、図1のシミュレーションは、LKIKが緩和された期待値の理想値からのずれである誤差を大幅に削減する上で、GKIKを上回ることを否定できないことを示しています。弱いノイズ($\xi = 0.02$)と強いノイズ($\xi = 0.2$)の両方のシナリオで、LKIKの層数を増やすと、緩和された期待値の偏差が大幅に減少します。例えば、図1aでは、$\xi = 0.02$の場合、GKIK(1層)は誤差約$10^{-3}$でプラトーになりますが、20層のLKIKは、より高い緩和次数で誤差を$10^{-5}$未満に達成します。これは、層ベースのノイズ増幅メカニズムが、GKIKが処理できなかった誤差を効果的に抑制していることの決定的な証拠です。図1の破線は、層状KIK式(式30)の予測を表しており、シミュレーション結果とよく一致しており、基盤となる数学モデルをさらに検証しています。
第二に、本論文は、十分な数の層を持つLKIKのバイアスフリー性に関する強力な証拠を提供しています。図3は、緩和次数7の誤差を層数に対してプロットしており、誤差が$1/L^2$でスケールすることを明確に示しています。赤丸(シミュレーション結果)が灰色の$1/L^2$曲線によく適合していることは、理論的予測(式34)を確認しています。このスケーリングは、層数が増加するにつれて、高次マグナスノイズ項からの残差バイアスが急速に減少するため、LKIKを実質的にバイアスフリーにする重要な数学的主張です。これは、考慮されていない高次マグナス項による小さな残差誤差に苦しんだGKIKの主要な制限に直接対処します。
第三に、LKIKの中間回路測定(MCM)およびフィードフォワードを含む動的回路との互換性は、重要なブレークスルーです。図4は、LKIKが動的回路(青線)と非動的なユニタリ進化回路(緑線)の両方で同等にうまく機能することを示しています。どちらの場合も、誤差$\Delta(A)$は緩和次数が増加するにつれてゼロに近づきます。これは、LKIKが量子誤り訂正(QEC)プロトコルに不可欠なMCMとのGKIKの非互換性を克服したという、困難な証拠です。これにより、LKIKは複雑な実際の量子計算のための実行可能なQEM手法となります。
最後に、本論文の新しい実験結果には直接示されていませんが、テキストはLKIKが元のKIKプロトコルのドリフト耐性を継承していることを強調しており、これは補足ノート1で実証されています。これは、手法の性能がノイズパラメータの時間的変動に対して堅牢であることを意味し、長時間の量子実験にとって重要な特徴です。バイアスフリー操作、動的回路互換性、およびドリフト耐性の組み合わせにより、LKIKはNISQ時代における堅牢で汎用性の高いQEMアプローチとなります。
制限と将来の方向性
層状KIK(LKIK)プロトコルは量子誤り緩和における重要な進歩を示していますが、現在の制限を認識し、将来の開発の方向性を検討することが重要です。
最初の制限の1つは、この原稿が「プレス中の記事」であり、編集されていないバージョンであり、誤りが含まれている可能性があることです。技術的な観点から、LKIKはドリフト耐性がありバイアスフリーであるように設計されていますが、パルスベースの逆プロトコル(KIKコンポーネント)への依存は、すべての量子コンピューティングプラットフォームおよびゲートタイプで普遍的に単純に実装できるわけではない可能性があります。特に、本論文は、固定または調整可能なカプラー位相ゲート[72]のパルス逆の実装が「それほど単純ではない」と述べています。これは、ハードウェアレベルの制御とキャリブレーションが、多様なプラットフォームでの広範な適用性にとって依然として実用的な課題であることを示唆しています。
考慮すべきもう1つの側面は、サンプリングオーバーヘッドです。LKIKは、特に適応係数を使用する場合、サンプリングコストを削減できますが、それでもかなりのオーバーヘッドが発生します。本論文は、「ドリフト耐性のあるQEMプロトコルでは、1万ショット以上のサンプリングオーバーヘッドが現実的である」と述べています。これは現実的であると見なされますが、特に回路の複雑さが増すにつれて、依然として実質的なリソースコストを表します。多変量外挿(MVE)との比較も、MVEが(より小さな深さオーバーヘッドにもかかわらず)GKIKを使用した単一層テイラー(SLT)よりも「大幅に大きいサンプリングオーバーヘッド」を発生させることを示しており、ランタイムとサンプリング効率の最適化が依然として重要な分野であることを示唆しています。
さらに、LKIKの理論的誤差スケーリング$1/L^2$は、「十分に薄く、均一に間隔が空いた層」という仮定に依存しています。本論文は、均一性からの逸脱がより粗い$1/L$上限にわずかに影響することを示していますが、最適な$1/L^2$スケーリングを実際に達成するには、慎重な回路分解とパルスレベル制御が必要になる場合があります。動的量子回路に対するLKIKの実験的検証は、言及されているように、主にコンパニオン論文[62]で行われているため、この論文内のすべての主張に対する直接的な実験的証拠は詳細には述べられていません。
将来に向けて、いくつかのエキサイティングな議論のトピックと研究の方向性が現れます。
-
より深いQEC-QEM統合: LKIKの中間回路測定とのシームレスな互換性は、真に堅牢なハイブリッドQEC-QEMプロトコルの扉を開きます。将来の研究は、QECが支配的な局所的、非相関的誤差を処理し、LKIKが漏洩、相関、およびコヒーレント誤差などの残差的、修正困難な誤差を緩和する統合システムの設計と実験的実証に焦点を当てる可能性があります。これにより、耐故障量子コンピューティングの境界を大幅に押し広げることができます。
-
層分解と適応係数の最適化: 与えられた量子回路とノイズプロファイルに対して、層の数と構造($L$)を最適に決定するにはどうすればよいでしょうか?研究は、目標精度を満たしながら総オーバーヘッドを最小限に抑えるために$L$を動的に調整する層分解のための適応アルゴリズムを探求する可能性があります。適応後処理技術の開発(この作業では延期された)は、より少ないショットと回路でより強力な緩和を達成するために不可欠です。
-
ハードウェア固有の実装とパルスエンジニアリング: さまざまな量子ハードウェアアーキテクチャ(例:超伝導、トラップドイオン、フォトニック)上のさまざまなゲートセットに対するパルス逆操作の実装における特定の課題と解決策の調査。これには、薄い層での漏洩ノイズと励起を緩和するための高度なパルス整形技術が含まれる可能性があり、さまざまなプラットフォーム全体での手法の実用性を保証します。
-
非マルコフ効果の緩和: KIKを適用する前に非マルコフノイズに対処するためにパウリツイリングと擬似ツイリングを使用できますが、非マルコフノイズモデルをLKIKフレームワーク自体に直接組み込む方法を探索すると、さらに強力で一般的な緩和戦略につながる可能性があります。これには、非マルコフダイナミクスが層状回路をどのように伝播するかについてのより深い理解が必要になります。
-
他のQEM手法との相乗効果: 本論文は、LKIKを特性評価ベースの手法(PEC、PEA、機械学習)と組み合わせて、ノイズの「大部分」に対処し、LKIKがドリフトとスパースノイズモデル外の誤差に集中できるようにすることを提案しています。将来の研究は、これらのハイブリッドアプローチを体系的に探求し、サンプリングオーバーヘッド、ドリフト耐性、および全体的なパフォーマンスのトレードオフを定量化する可能性があります。例えば、LKIKをテンソル誤り緩和(TEM)と組み合わせると、LKIK単独よりも少ないサンプリングオーバーヘッドでノイズドリフト耐性のあるソリューションが得られる可能性があります。
-
ランタイムオーバーヘッドとスケーラビリティ: 他の高度なQEM手法(MVEなど)との比較を含む、LKIKのランタイムオーバーヘッドの詳細な分析と実験的検証は、その実用的なスケーラビリティを評価するために不可欠です。複数の量子プロセッサにわたるショット収集の並列化戦略を探索すると、壁時計時間がさらに短縮され、高いサンプリングオーバーヘッドがより管理しやすくなる可能性があります。
これらの制限に対処し、これらの将来の方向性を探求することにより、LKIKフレームワークは、NISQ時代およびそれ以降の信頼性の高い量子計算の基盤となる可能性があります。
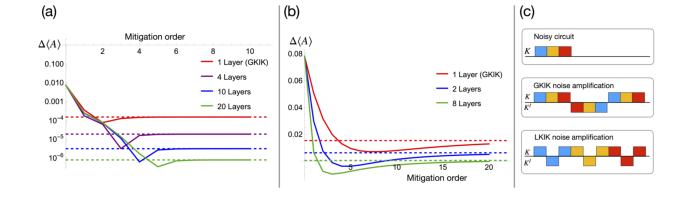 Figure 1. A four-qubit simulation demonstrating the advantage of using the layered-based KIK (LKIK) amplification over the global KIK amplification (GKIK - single layer). In (a) & (b) the y axis is the difference ∆⟨A⟩be- tween the mitigated expectation value (see main text) and the ideal value, and the x axis is the mitigation order M with M = 0 indicating no mitigation. The ideal expectation value is ⟨A⟩≃0.025. In (a) the noise strength parameter is ξ = 0.02 and in (b) it is ξ = 0.2. Fig. (a) shows that LKIK is essential for achiev- ing high accuracy even when the noise is weak, while Fig. (b) shows that LKIK is important when the noise is strong even when the requested target accuracy is modest. The dashed lines show the prediction of the Layered KIK formula (30). (c) An illustration of a three-layer circuit (top) being noise amplified with GKIK (middle) and LKIK (bottom). The amplification factor is three for both cases. Squares below the black horizontal line represent pulse-inverse operation
Figure 1. A four-qubit simulation demonstrating the advantage of using the layered-based KIK (LKIK) amplification over the global KIK amplification (GKIK - single layer). In (a) & (b) the y axis is the difference ∆⟨A⟩be- tween the mitigated expectation value (see main text) and the ideal value, and the x axis is the mitigation order M with M = 0 indicating no mitigation. The ideal expectation value is ⟨A⟩≃0.025. In (a) the noise strength parameter is ξ = 0.02 and in (b) it is ξ = 0.2. Fig. (a) shows that LKIK is essential for achiev- ing high accuracy even when the noise is weak, while Fig. (b) shows that LKIK is important when the noise is strong even when the requested target accuracy is modest. The dashed lines show the prediction of the Layered KIK formula (30). (c) An illustration of a three-layer circuit (top) being noise amplified with GKIK (middle) and LKIK (bottom). The amplification factor is three for both cases. Squares below the black horizontal line represent pulse-inverse operation
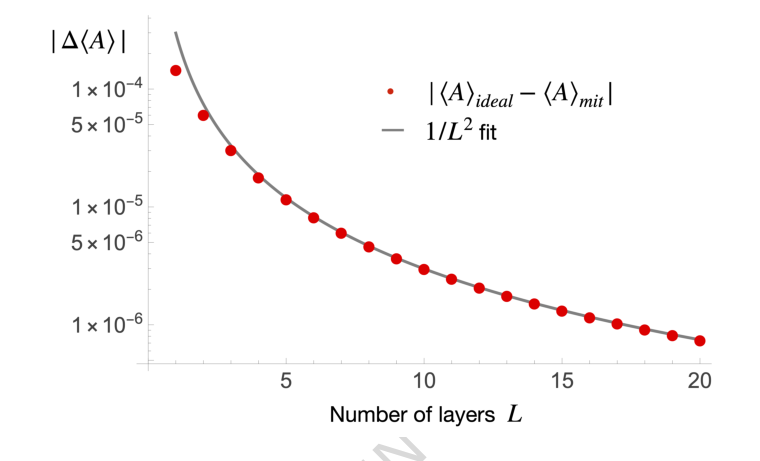 Figure 3. For the same example as in Fig. 1a, the error with respect to the ideal expectation value (red dots) is plotted for order seven as a function of number of layers. The good fit to the 1/L2 curve confirms the prediction of Eq. (34)
Figure 3. For the same example as in Fig. 1a, the error with respect to the ideal expectation value (red dots) is plotted for order seven as a function of number of layers. The good fit to the 1/L2 curve confirms the prediction of Eq. (34)