Layered KIK quantum error mitigation for dynamic circuits
Layered KIK quantum error mitigation for dynamic circuits
Background & Academic Lineage
The Origin & Academic Lineage
本文所解决的问题源于在嘈杂中等规模量子(NISQ)时代及以后构建可靠量子计算机的持续挑战。虽然量子纠错(QEC)是容错量子计算的最终目标,但它需要大量的硬件开销,特别是量子比特数量的显著增加。这使得QEC对于当前和近期的设备来说不切实际。
作为一种更直接、更实用的解决方案,量子纠错(QEM)应运而生。QEM旨在减少噪声对量子计算结果的影响,而无需QEC所需的大量硬件。相反,QEM通常会带来运行时成本,表现为实现所需精度需要增加“采样次数”(重复次数)。然而,QEM本身也面临可扩展性问题;其采样开销随着电路体积呈指数级增长,将其适用性限制在最多约一百个量子比特的电路中。
许多早期QEM方法的一个关键“痛点”是它们对噪声漂移的敏感性。量子系统中的噪声参数,如退相干时间或相干误差幅度,通常在实验过程中会发生变化。由于QEM方法会显著增加实验运行时间,这些时间噪声漂移会严重降低最终结果。基于表征的QEM方法尤其容易受到影响,因为精确学习噪声剖面所需的时间往往与噪声参数漂移的速度相冲突。
这促使了无关(免表征)QEM方法的开发,例如零噪声外推(ZNE)和自适应KIK协议,这些方法本身就对噪声漂移更具弹性。自适应KIK方法,在先前的工作[61]中引入,由于其漂移弹性、对非Clifford门的应用以及保证的性能界限,显示出巨大的潜力。它被确定为与QEC集成的一个有力候选者,形成混合QEC-QEM方法,可以利用QEC来处理主要的局部误差,并利用QEM来处理QEC难以解决的残余、相关或相干误差。
然而,原始的自适应KIK协议(称为全局KIK或GKIK)存在两个根本性限制,阻碍了其与QEC和动态电路的无缝集成:
1. 与中途测量(MCMs)不兼容: MCMs对于执行QEC协议中的综合测量至关重要,它允许在计算过程中检测和纠正错误。GKIK的全局噪声放大策略与这些中间测量不兼容。
2. 高阶Magnus噪声项的残余偏差: GKIK的公式忽略了Magnus展开中的高阶项,这可能会引入一个微小但显著的偏差,尤其是在处理强噪声或需要非常高精度时。这种偏差可能导致不准确的缓解结果。
这些限制迫使作者开发了分层KIK(LKIK)方法,该方法专门设计用于克服这些障碍,通过采用基于层的噪声放大方法,使其与动态电路和中途测量兼容,并更有效地解决高阶Magnus噪声项。
直观的领域术语
-
量子纠错(QEM):
- 直观类比: 想象你试图用一个有点模糊的相机拍一张非常精确的照片。QEM就像是拍几张照片,甚至可能以可控的方式故意让其中一些照片更模糊,然后用一个特殊的计算机程序将它们组合起来,猜测出完美清晰的照片应该是什么样子。你并没有修复相机镜头,但尽管有缺陷,你还是能得到一张更好的照片。
-
量子纠错(QEC):
- 直观类比: 想象一下,你把一个秘密信息写在三张独立的纸上,交给三个不同的信使。如果一个信使弄丢了纸或者纸被弄脏了,你仍然可以从另外两张纸上重建原始信息。QEC就像有一个系统,它不仅能告诉你信使的纸是否损坏,还能帮助你修复或替换它,确保信息总是完美地到达,但这需要更多的资源(更多的纸,更多的信使)。
-
动态电路:
- 直观类比: 考虑一个食谱,下一步取决于之前品尝的结果。如果汤太咸(一个“中途测量”结果),你就加更多的水(一个特定的“门”操作)。如果味道正好,你就继续下一个配料。动态电路是一种量子程序,它可以根据计算过程中进行的测量来改变其路径或操作,而不是遵循固定的、预定的序列。
-
噪声漂移弹性:
- 直观类比: 如果你试图在一艘移动的船上画一条直线,“噪声漂移弹性”意味着你的绘画技巧可以适应船体持续、不可预测的摇晃,并仍然画出一条直线。它不需要你停下船或不断重新测量它的运动;它只是在不断变化的情况下保持线条的笔直。
-
Magnus展开:
- 直观类比: 想象一下试图预测一个台球的精确轨迹,不仅要考虑初始撞击,还要考虑桌面的微小瑕疵、轻微的空气阻力以及球的旋转。Magnus展开是一种数学工具,通过为这些不完美之处添加越来越精细的修正来帮助描述球的路径。“高阶Magnus噪声项”就像那些非常微小、几乎难以察觉的影响,虽然微小,但如果你需要一个极其精确的预测球最终会停在哪里,它们可能会变得很重要。
符号表
| 符号 | 描述 |
|---|---|
Problem Definition & Constraints
Core Problem Formulation & The Dilemma
当前的量子计算实验环境充斥着噪声,这会在量子电路的期望值中引入偏差。虽然量子纠错(QEM)提供了一条实际的解决途径,但现有方法,特别是全局KIK(GKIK)协议,面临着严重的限制,阻碍了其适用性和可扩展性。
输入/当前状态的特征是嘈杂的量子电路,其中GKIK协议尽管具有漂移弹性等优点,但存在几个关键缺陷:
* 与中途测量(MCMs)不兼容: GKIK依赖于“全局噪声放大”(第2页)使其与MCMs(第5页)根本不兼容。MCMs对于动态量子电路至关重要,并且是量子纠错(QEC)协议的基石,因为它们涉及完全退相干状态的投影测量。在全局折叠框架内将这些视为“无限强的噪声”会导致不正确的噪声放大,因为投影效应是理想动态电路的预期组成部分,不应被缓解(第10页)。
* 高阶Magnus噪声项的偏差: GKIK公式忽略了“高阶Magnus噪声项”(第2页),导致缓解的期望值出现“小偏差”(第5页)。当噪声很强或“需要非常高的精度”时(第10页),这种偏差会变得很大。
* 哈密顿量求逆困难: GKIK需要“反转有效哈密顿量的符号”,这在某些量子计算平台上“不易实现”(第9页)。
此外,当考虑与QEC集成时,基于表征的QEM方法会遇到自身的问题。逻辑量子比特,即QEC的输出,表现出“微小”的错误率(第5页)。为缓解而表征这些微小错误变得“耗时”,并需要“高精度噪声表征”(第4-5页),使得这种集成不切实际。
期望终点(输出/目标状态)是一种“漂移弹性且无偏差”的QEM方法,用于“动态电路”(第9页)中的门误差缓解。具体来说,该方法必须:
* “与中途测量兼容”(第2页,第5页)。
* 有效抑制“由于未考虑的高阶Magnus噪声项引起的残余误差”(第2页),确保在强噪声场景下也能实现高精度。
* 实现“与量子纠错码的无缝集成”(第2页),允许QEC处理主要的噪声,而QEM处理残余和相关误差。
* “不增加比原始GKIK协议(第2页,第9页)额外的开销或实验复杂性”来实现这些改进。
* 能够通过调整层数将残余缓解误差降低到“目标实验精度”以下(第17页)。
当前状态与期望终点之间的确切缺失环节或数学鸿沟在于开发一种QEM协议,该协议能够系统地解决$\Omega_2$偏差并集成MCMs,而不会损害缓解过程或产生过多的开销。本文提出了一种“基于层的KIK应用”(LKIK)来弥合这一差距。在数学上,GKIK的性能受整个电路的二阶Magnus项$\Omega_2^G$的限制(第17页)。LKIK方法旨在消除$\Omega_2$中的层间交换子贡献,并通过增加层数使剩余的$\Omega_2$贡献可以忽略不计,从而实现无偏差操作(第17页)。挑战在于构建这种分层方法,使其能够正确地放大每一层的噪声,同时保留MCMs的功能并抵消高阶噪声项。
试图解决这个特定问题的先前研究人员所陷入的痛苦权衡或困境体现在几个方面:
1. QEM运行时 vs. 噪声漂移: 许多QEM协议显著增加了实验的运行时间,这反过来又放大了“时间噪声漂移”(第4页)的影响。依赖噪声表征的方法尤其脆弱,因为它们的表征在长时间的实验运行中会很快过时(第4页)。
2. QEC与基于表征的QEM集成: QEC与QEM结合的愿望很强烈,但基于表征的QEM要求误差足够明显且结构简单,以便于学习。这与QEC后逻辑量子比特上预期的“微小”且复杂的误差相冲突,导致“耗时的、高精度的噪声表征”(第4-5页)。这造成了一种困境:提高QEC的性能反而使QEM的集成更加困难。
3. GKIK的全局放大 vs. 中途测量: GKIK的全局噪声放大本质上与MCMs的局部、状态投影性质相冲突。MCMs是动态电路和QEC的组成部分,但GKIK的框架无法正确处理它们,如果将MCMs视为需要反演的电路的一部分,会导致“不正确的噪声放大”(第10页)。这是实现GKIK与QEC-QEM集成的一个核心困境。
4. 精度/噪声强度 vs. 采样成本: 使用GKIK实现高精度或缓解强噪声需要考虑“高阶Magnus噪声项”。然而,解决这些项所需的采样成本可能变得“不切实际”(第10页),从而在期望性能和实验可行性之间产生了权衡。
Constraints & Failure Modes
量子纠错对于动态电路的鲁棒量子纠错问题由于几个严峻的现实壁垒而变得“极其困难”:
-
物理约束:
- 哈密顿量求逆复杂性: GKIK方法需要“反转有效哈密顿量的符号”(第9页)。这并非一个普遍简单的操作,在各种量子计算平台上实现起来可能很困难,特别是对于复杂的门或架构。
- 薄层控制电子速度: 虽然LKIK提供了优势,但使用“更薄的层”(即,将电路分成许多小段)可能需要“更快的控制电子设备”,因为驱动哈密顿量的符号变化更频繁(第25页)。这给层的粒度带来了硬件限制。
- 薄层中的泄漏噪声和激发: 对于“更薄的层”,存在“泄漏噪声和非计算态激发的潜在可能性增加”(第25页)。缓解这些需要额外的脉冲整形技术,增加了实验设置的复杂性。
-
计算/采样约束:
- QEM的指数级采样开销: 大多数QEM方法,包括KIK,都会产生一个“采样开销”,该开销随着电路体积的增加呈“指数级”增长(第3页)。这将其适用性限制在相对较少量子比特的电路中(例如,超导电路中约一百个)。
- 耗时的噪声表征: 基于表征的QEM方法需要精确的噪声参数知识。对于“微小”错误,例如逻辑量子比特上的错误,这会导致“耗时的、高精度的噪声表征”(第4-5页),使其不适用于实时应用或大型电路。
- 高精度不切实际的采样成本: 当噪声很强或“需要非常高的精度”时,为考虑高阶Magnus噪声项所需的采样成本可能变得“不切实际”(第10页)。
- 朴素逐层缓解的指数级开销: 逐层独立缓解的直接方法(例如,通过将每层的缓解演化算符相乘)会导致采样开销“随着层数的增加呈指数级增长”(第22页)。例如,十层的零阶缓解可能需要大约一百万($2^{20}$)次采样,这通常是禁止的。
-
数据驱动约束:
- 时间噪声漂移: 量子处理器中的噪声参数不是静态的;它们“通常随时间变化”(第4页,第6页),原因包括温度波动、杂散电磁场或双层系统缺陷。由于QEM实验可能运行“数十小时或更长时间”,这些漂移会显著影响缓解的准确性(第6页)。
- 对表征基QEM的要求: 为了使表征基方法有效,错误必须“足够明显,以便在合理的时间内以足够的精度学习”,并且“噪声结构足够简单,可以用少量参数来描述”(第4-5页)。这些条件通常不满足,尤其对于逻辑量子比特。
- 嘈杂的中途测量: 在实际量子系统中,MCMs“通常是嘈杂的”,这可能“导致执行错误的门”(第15页)。这引入了另一层需要解决的错误,使动态电路复杂化。
故障模式(如果这些约束未被克服或使用了先前的方法):
* 性能下降: 如果QEM协议对噪声漂移不具弹性,最终结果将受到显著影响,导致结果不可靠(第4页)。
* 不正确的结果: 当噪声与理想酉算符不交换时,使用门插入等方法进行噪声放大,会导致“不正确的放大”和有偏差的结果(第8页,第20页)。
* 无法集成QEC: GKIK与MCMs的不兼容性意味着,严重依赖MCMs进行综合测量的QEC无法无缝集成,从而限制了整体的纠错能力(第5页,第10页)。
* 无法达到的精度: 在GKIK中忽略高阶Magnus项意味着,在不产生“不切实际”的采样成本的情况下,实现非常高的精度或缓解强噪声是不可能的(第10页)。
* 可扩展性瓶颈: 许多QEM方法的指数级采样开销,如果未得到解决,将阻止其应用于更大、更复杂的量子电路,限制了量子计算的可扩展性(第3页)。
Why This Approach
The Inevitability of the Choice
分层KIK(LKIK)方法通过直接解决先前量子纠错(QEM)方法(包括先前最有前途的全局KIK(GKIK)协议)的关键限制,成为唯一可行的解决方案。传统的“最先进”(SOTA)方法,如基于表征的QEM(例如,概率纠错、Clifford回归、机器学习),被认为不足,因为它们固有地对时间噪声漂移敏感。量子系统中的噪声参数通常随时间变化,而QEM方法所产生的显著采样开销意味着实验可能运行数十小时,使得这些漂移成为一个重大障碍(第4页,第6页)。此外,基于表征的方法在逻辑量子比特上预期的微小错误率方面存在困难,导致不切实际的长时间表征时间和与量子纠错(QEC)要求的兼容性问题(第5页)。
无关噪声放大方法虽然对漂移更具弹性,但也存在显著的缺点。脉冲拉伸零噪声外推(ZNE)需要复杂的校准,并且与扭曲技术不兼容,因为扭曲会错误地缩放相干误差。数字ZNE在噪声与理想酉算符不交换时会产生强误差偏差,而这种情况通常是存在的。NOX作为一种一阶缓解理论,仅限于弱噪声场景(第4页)。
自适应KIK方法(GKIK)被确定为对漂移具有弹性的QEM和QEC集成的有力候选者,为非强噪声提供了收敛保证。然而,GKIK本身存在两个关键的内在障碍,阻碍了其普遍适用性:
1. 与中途测量(MCMs)不兼容: MCMs对于执行QEC协议中的综合测量至关重要。GKIK的全局折叠方法将MCMs视为“无限强的噪声”,它们会完全退相干状态,使其无法在其框架内进行缓解,而不改变理想动态电路的功能(第5页,第10页)。
2. 高阶Magnus噪声项的残余偏差: GKIK由于未考虑的高阶Magnus展开修正而表现出微小但显著的偏差。当噪声很强或需要非常高的精度时,这种偏差会成为问题(第5页,第9页,第10页)。
作者意识到,为了同时克服这两个特定障碍,同时保留KIK的关键漂移弹性和无关性,需要采用基于层的应用。这一认识促使了分层KIK(LKIK)的开发,该方法专门设计用于解决这些问题,并为真正漂移弹性且无偏差的QEC-QEM协议开辟道路(第9页)。
Comparative Superiority
分层KIK(LKIK)在定性上优于先前的方法,包括全局KIK(GKIK),主要通过其增强的偏差抑制和与动态电路的固有兼容性。
首先,LKIK显著改善了偏差抑制。GKIK虽然有效,但由于高阶Magnus噪声项存在残余偏差(第5页,第10页)。LKIK通过将电路分成层并逐层应用KIK放大,系统地抑制了这些高阶修正。分析表明,层间交换子(图2中的方形区域)的贡献被消除,并且随着层数($L$)的增加,层特定的二阶Magnus项(图2中的蓝色三角形)变得可以忽略不计(第17页,第18页)。这使得该方法在实践中“无偏差”,意味着对于任何目标精度,都可以选择足够大的$L$来将残余偏差降低到目标实验精度以下(第18页)。定量而言,对于薄层,残余误差的尺度为$1/L^2$(第19页,图3),这比$1/L$的粗略界限“快得多”,显示出在误差减少方面具有优越的结构优势。
其次,LKIK的设计固有地支持中途测量(MCMs)和动态电路,这是相对于GKIK的一个关键结构优势。GKIK的全局折叠方法与MCMs不兼容,因为它们代表投影操作,在不破坏理想电路的情况下无法全局反转或放大(第10页)。LKIK通过将MCMs视为分层缓解框架内的未缩放函数来克服这一点。这允许在不进行缓解的情况下整合MCMs,从而在动态电路中保留其理想功能(第15页,方程22、23,图4)。这是一个关键的区别,因为动态电路,包括QEC码,严重依赖MCMs。
最后,LKIK保留了原始KIK协议的关键优势——漂移弹性。这意味着它可以处理噪声参数的时间变化,例如退相干时间或相干误差的变化,而不会降低性能(第4页,第8页)。这相对于基于表征的QEM方法具有显著的定性优势,后者固有地对这种漂移敏感(第4页,第6页)。漂移弹性、无偏差操作和MCM兼容性的结合,使得LKIK在将QEM与QEC集成以及在嘈杂中等规模量子(NISQ)时代进行通用动态电路方面具有压倒性优势。
Alignment with Constraints
分层KIK(LKIK)方法完美地符合动态电路鲁棒量子纠错的严苛要求,有效地将问题的约束与解决方案的独特属性相结合。
-
与动态电路和中途测量(MCMs)兼容: 主要约束是开发一种适用于任何动态电路的QEM方法,包括那些具有MCMs的电路,而MCMs是QEC的基础。GKIK由于其全局折叠方法在此失败(第5页,第10页)。LKIK的分层放大方案直接解决了这个问题。通过将KIK放大应用于各个层,可以将MCMs作为未进行缓解的未缩放操作来整合,从而在动态电路中保留其理想功能(第15页,方程22、23)。这是一个完美的匹配,数值模拟显示LKIK对于酉演化和具有MCMs及前馈的动态电路表现同样出色(图4,第21页)。
-
漂移弹性: QEM协议的一个关键期望特性是能够抵抗噪声漂移,即噪声参数在实验过程中会发生变化(第4页)。LKIK继承了KIK协议的这一关键特性。放大电路的执行顺序经过精心设计,以消除时间噪声漂移效应,确保即使噪声参数波动,该方法的性能也不会下降(第8页,第9页)。这直接解决了在现实的、漂移的量子硬件中可靠运行的约束。
-
高阶噪声项的缓解和无偏差操作: 高精度QEM的一个重要约束是存在高阶噪声项的残余误差,这困扰了GKIK(第5页,第10页)。LKIK的分层方法系统地抑制了这些项。通过消除层间交换子的贡献,并使足够层数的层特定二阶Magnus项可以忽略不计,LKIK在实践中实现了“无偏差”缓解(第17页,第18页)。对于薄层,残余误差的尺度为$1/L^2$,确保通过选择适当的层数,可以将缓解误差降低到任何目标实验精度以下(第19页)。这直接解决了即使在强噪声存在下也需要高精度缓解的需求。
-
与量子纠错(QEC)的无缝集成: 首要目标是实现对经过不完美QEC的电路进行可靠且漂移弹性的纠错(第3页)。由于QEC码是动态电路的实例,LKIK与动态电路和MCMs的兼容性使其能够与QEC无缝集成。这允许QEC处理主要的局部、非相关误差,而LKIK则处理QEC难以处理的残余误差,如泄漏、相关和相干误差(第3页,第15页)。这种协同作用提供了一种鲁棒的混合方法,完美地符合增强量子计算实验可靠性的愿景。
Rejection of Alternatives
本文提供了明确的理由来拒绝其他流行的QEM方法,突出了它们在动态电路、漂移弹性和高精度要求方面的根本性局限性。
-
基于表征的QEM方法(例如,PEC、PEA、Clifford回归、机器学习): 这些方法因其“固有地对时间噪声漂移敏感”(第4页,第6页)而被明确拒绝。量子系统中的噪声参数不是静态的,它们可能在QEM实验的长运行时间内显著变化,使得基于表征的方法不可靠,因为学习到的噪声模型很快就会过时。此外,将这些方法应用于逻辑量子比特,其中错误预计非常微小,将需要“耗时的、高精度的噪声表征”,这是不切实际的(第5页)。由于这些表征要求,它们也给QEC集成带来了挑战。
-
零噪声外推(ZNE)方法(例如,脉冲拉伸ZNE、数字ZNE、NOX):
- 脉冲拉伸ZNE被认为是有问题的,因为它“需要仔细的控制和校准程序”,并且“与扭曲技术也不完全兼容……因为拉伸会错误地缩放相干误差”(第4页)。这限制了其在某些噪声类型下的实际适用性和有效性。
- 数字ZNE在“噪声与理想酉算符不交换时,在任何缓解阶数下都会产生强误差偏差——而这种情况通常是存在的”(第4页)。本文明确指出,“数字噪声放大仅在不常见的噪声恰好与理想门交换的情况下才是正确的”(第7页),使其普遍不适用。
- NOX因其“是一阶缓解理论,因此仅限于弱噪声场景”(第4页)而被拒绝用于高精度或强噪声场景。
-
纯化方法: 这些方法被考虑但被驳回,因为它们“涉及硬件开销,并且仅限于有限的噪声模型”(第6页)。目标是一种无需额外硬件开销且适用性更广的方法。
-
全局KIK(GKIK): 虽然GKIK是漂移弹性QEM的一个有力候选者,但由于两个关键缺陷,它最终被拒绝作为最终解决方案(第5页,第9页,第10页):
- 与中途测量(MCMs)不兼容: GKIK的全局折叠机制无法正确处理MCMs,而MCMs对于动态电路和QEC综合测量至关重要。MCMs充当“无限强的噪声”,在不损坏理想电路的情况下无法在全局折叠框架内进行描述(第10页)。
- 高阶Magnus噪声项的残余偏差: GKIK表现出微小但持续的偏差,在强噪声或需要非常高精度时会变得显著(第10页)。这一限制意味着它无法实现真正无偏差的缓解。
分层KIK方法被开发出来,正是为了克服所有现有替代方案的这些已识别的缺点,提供一种漂移弹性、无偏差且与动态电路兼容的QEM解决方案,而无需额外的硬件开销。
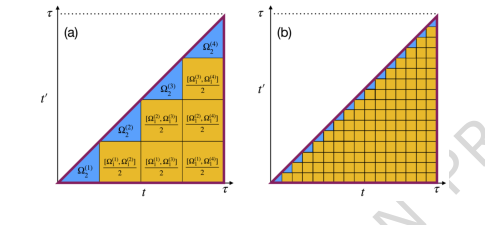 Figure 2. Local contributions to the global Ω2. (a) & (b) The performance of the global KIK introduced in [61] is limited by the second-order Magnus term of the entire circuit, ΩG 2 . ΩG 2 is calculated using a double integral whose inte- gration domain is depicted by the big triangle in (a). τ is the time duration of the unmitigated circuit. The same circuit can be described as a sequence of L consecutive layers (L = 4 in (a)). As a result, ΩG 2 can be divided into two different types of contributions: i) the blue triangles that arise from the Ω2 of each layer, and ii) the orange squares which originate from the Ω1 commutator of different layers. Crucially, we show that in the layered KIK protocol, the contribution of the squares is eliminated, leaving only the blue triangles con- tribution. Furthermore, as the layers get thinner (b), the contribution of the blue triangles becomes negligible. From this argument one can derive an upper bound on the LKIK mitigation error that scales as 1/L. Interestingly, when the layers are sufficiently thin, we find a tighter error bound that scales as 1/L2. As such, LKIK is bias-free in practice, since it is always possible to choose a sufficiently large L that guarantees that the residual mitigation error remains below the target experimental accuracy
Figure 2. Local contributions to the global Ω2. (a) & (b) The performance of the global KIK introduced in [61] is limited by the second-order Magnus term of the entire circuit, ΩG 2 . ΩG 2 is calculated using a double integral whose inte- gration domain is depicted by the big triangle in (a). τ is the time duration of the unmitigated circuit. The same circuit can be described as a sequence of L consecutive layers (L = 4 in (a)). As a result, ΩG 2 can be divided into two different types of contributions: i) the blue triangles that arise from the Ω2 of each layer, and ii) the orange squares which originate from the Ω1 commutator of different layers. Crucially, we show that in the layered KIK protocol, the contribution of the squares is eliminated, leaving only the blue triangles con- tribution. Furthermore, as the layers get thinner (b), the contribution of the blue triangles becomes negligible. From this argument one can derive an upper bound on the LKIK mitigation error that scales as 1/L. Interestingly, when the layers are sufficiently thin, we find a tighter error bound that scales as 1/L2. As such, LKIK is bias-free in practice, since it is always possible to choose a sufficiently large L that guarantees that the residual mitigation error remains below the target experimental accuracy
Mathematical & Logical Mechanism
The Master Equation
本文提出的分层KIK(LKIK)量子纠错方法的核心数学引擎,是通过以线性方式组合放大的嘈杂电路来构建一个缓解的演化算符。LKIK缓解演化算符的中心方程,推广到$L$层和高达$M$的缓解阶数,由下式给出:
$$ K_{\text{mit,LKIK}}^{(M)} = \sum_{j=0}^M a_j^{(M)} \prod_{l=1}^L K_l(K_l^I K_l)^j $$
一旦构建了该缓解算符,对于可观测量$A$在初始状态$\rho_0$上的最终缓解期望值通过以下方式获得:
$$ A_{\text{mit}}^{(M)} = \sum_{j=0}^M a_j^{(M)} \langle A | \left( \prod_{l=1}^L K_l(K_l^I K_l)^j \right) | \rho_0 \rangle $$
Term-by-Term Autopsy
让我们剖析这些方程以理解每个组成部分:
-
$K_{\text{mit,LKIK}}^{(M)}$:这是分层KIK缓解演化算符,阶数为$M$。
- 数学定义:它是放大噪声层算符乘积的线性组合。
- 物理/逻辑作用:该算符代表了在应用LKIK缓解协议后,理想的、无噪声的演化算符$U$的最佳估计。其目标是有效地“撤销”量子电路中存在的噪声。
- 为何求和:求和用于形成噪声通道的逆的多项式逼近。求和中的每一项都贡献于更高阶的修正,随着$M$的增加,可以实现更好的误差缓解。
-
$M$:这表示缓解阶数。
- 数学定义:一个整数,表示包含在线性组合中的噪声放大最高次幂。
- 物理/逻辑作用:更高的$M$意味着对噪声逆通道更复杂的多项式逼近,可能导致更好的误差缓解,但也会增加采样开销。
-
$a_j^{(M)}$:这些是线性组合的系数。
- 数学定义:实数,通常来自泰勒展开(方程(4)中的泰勒系数)或通过最小化L2范数自适应确定(参考文献[61]中提到)。
- 物理/逻辑作用:这些系数对于确保放大的嘈杂电路的线性组合有效地逼近理想的、无噪声的演化至关重要。它们被设计用来抵消直到某个阶数的噪声项。本文主要关注泰勒系数,它们是解析推导的,不是学习的。
- 为何相加:系数相加是因为它们形成了一个线性组合,这是多项式逼近的数学结构。
-
$\prod_{l=1}^L$:这表示层之间的乘积。
- 数学定义:算符的顺序组合,从$l=1$到$L$排序。
- 物理/逻辑作用:这表示量子电路被分成$L$个不同的、不重叠的“层”。整个电路的演化是这些层演化的顺序应用。乘积确保了操作的时间顺序得到尊重,这在量子力学中至关重要。
-
$K_l$:这是层$l$的嘈杂演化算符。
- 数学定义:一个算符(在Liouville空间中),描述了第$l$层的实际、不完美的量子演化,包括理想的酉操作和噪声。
- 物理/逻辑作用:这是嘈杂电路的基本构建块。它是我们试图缓解其误差的对象。
-
$K_l^I$:这是$K_l$的脉冲逆。
- 数学定义:通过反转第$l$层有效相互作用哈密顿量的调度并反转其符号而获得的算符。
- 物理/逻辑作用:脉冲逆是KIK协议的关键组成部分。它被设计用来“撤销”$K_l$的理想部分,同时以受控的方式保留或放大噪声。这允许构建噪声放大的电路。
-
$(K_l^I K_l)^j$:这个项表示层$l$的噪声放大,放大因子为$j$。
- 数学定义:算符$K_l^I K_l$应用$j$次。
- 物理/逻辑作用:乘积$K_l^I K_l$被设计成其理想部分是单位算符,但其噪声部分被放大。重复$j$次会进一步放大噪声。这种受控放大是基于噪声放大进行误差缓解的核心思想。
-
$\langle A | \cdot | \rho_0 \rangle$:这表示期望值。
- 数学定义:在Liouville空间中,对于算符$O$,期望值为$\text{Tr}[A \cdot O(\rho_0)]$,其中$A$是可观测量,$\rho_0$是初始状态。$\langle A | O | \rho_0 \rangle$是一种紧凑的表示方式。
- 物理/逻辑作用:这是量子实验中最终的感兴趣量——测量的平均值。缓解的目标是使这个值尽可能接近理想的、无噪声的期望值。
Step-by-Step Flow
将量子计算想象成一台复杂的机器,而LKIK则是一个复杂的维修和校准过程。以下是单个抽象数据点(代表量子状态)如何通过该机制流动:
-
电路拆解:首先,原始的、完整的量子电路(执行所需计算但固有噪声)在概念上被分解为$L$个较小的、顺序的“层”($K_1, K_2, \dots, K_L$)。每一层$K_l$本身就是一个有噪声的操作。
-
层特定噪声放大:对于每一层$K_l$,协议会生成一系列“放大”版本。这包括创建一个特殊的“脉冲逆”电路$K_l^I$,它被设计用来有效地反转$K_l$的理想部分。然后,对于每一层$l$和各种放大因子$j$(从0到$M$),构建一个噪声放大块$(K_l^I K_l)^j$。当$j=0$时,这个块就是单位算符。当$j=1$时,它是$K_l^I K_l$,依此类推。关键在于$K_l^I K_l$在以受控方式放大噪声的同时,不改变理想的酉功能。
-
重组为放大的完整电路:接下来,对于每个缓解阶数$j$,会重新组装一个完整的、全长度的量子电路。这个重组的电路由原始噪声层$K_l$与其噪声放大块$(K_l^I K_l)^j$串联而成,适用于每一层$l$。给定$j$的完整电路看起来像$K_L(K_L^I K_L)^j \dots K_2(K_2^I K_2)^j K_1(K_1^I K_1)^j$。这个过程生成了$M+1$个不同的完整电路,每个电路在所有层上都有不同程度的噪声放大。
-
执行和测量:然后,这些特别构造的$M+1$个电路中的每一个都在量子计算机上执行,从初始状态$\rho_0$开始。对于每次执行,都会测量可观测量$A$的期望值。这将产生一组原始的、有噪声的期望值$A_0^{\text{raw}}, A_1^{\text{raw}}, \dots, A_M^{\text{raw}}$。
-
后处理(线性组合):最后,这些原始期望值被输入到经典计算机中。在这里,它们使用预先确定的系数集$a_j^{(M)}$进行组合。最终的缓解期望值$A_{\text{mit}}^{(M)}$计算为加权和:$A_{\text{mit}}^{(M)} = \sum_{j=0}^M a_j^{(M)} A_j^{\text{raw}}$。这个线性组合充当滤波器,抵消放大的噪声项,从而提供对真实、无噪声期望值更好的估计。
Optimization Dynamics
分层KIK(LKIK)中的“优化”不是典型的机器学习意义上的连续、迭代学习过程,而是一种旨在收敛和减少偏差的战略构建和后处理方案。
-
噪声逆的逼近: 核心思想是使用多项式展开来逼近噪声通道的逆,$N^{-1}$。选择系数$a_j^{(M)}$使得线性组合$\sum_{j=0}^M a_j^{(M)} N^{2j}$有效地逼近$N^{-1}$。对于本文的范围,这些系数主要是泰勒系数,它们是解析推导的(方程4),来自$x^{-1}$在$x=1$附近的泰勒展开。因此,没有“学习”或迭代更新这些系数在此特定工作中。一旦选择了缓解阶数$M$,系数就是固定的。
-
通过缓解阶数($M$)实现收敛: 缓解的精度随着缓解阶数$M$的增加而提高。更高的$M$意味着对噪声逆通道更高阶的多项式逼近,可以抵消更复杂或更高阶的噪声项。这导致更精确的缓解期望值,向理想值收敛。然而,增加$M$也会带来更高的采样开销,因为需要执行更多的电路。
-
通过分层($L$)减少偏差: LKIK的一个关键创新是它能够通过将电路分成$L$层来显著减少残余偏差。本文证明,主导阶数的偏差项,与二阶Magnus项$\Omega_2$相关,对于足够薄的层,其尺度为$1/L^2$(方程34)。这意味着通过将电路分成更多的层,缓解方法本身的固有偏差可以变得任意小,从而使协议在实践中“无偏差”,只要$L$足够大。这是与增加$M$不同的关键收敛机制。
-
漂移弹性机制: 该协议被设计成对时间噪声漂移具有弹性。这是通过构建实验,使得总采样次数被分成多个集合来实现的。在每个集合中,执行所有$M+1$个放大的电路(给定$M$)。这确保了实验过程中发生的任何噪声漂移都会以相似的方式影响集合中的所有电路。后处理步骤中的线性组合(求和)然后有效地从每个集合中抵消这种共同的由漂移引起的偏差。对许多此类集合的缓解结果进行平均进一步减少了方差,从而实现了鲁棒的、漂移弹性的结果。这是一种巧妙的处理时变噪声的方法,而无需对其进行表征。
总之,LKIK机制通过预先计算系数来逼近逆函数来“学习”,并且通过增加逼近阶数($M$)和通过电路分层($L$)减少固有偏差来“收敛”。该方法的鲁棒性通过其固有的漂移弹性进一步增强,这是一种执行协议的结构属性,而不是迭代优化。
Results, Limitations & Conclusion
Experimental Design & Baselines
作者主要通过数值模拟严格验证了他们的分层KIK(LKIK)方法,并引用了配套的实验工作来解释特定方面。为了证明其数学声明,核心实验架构涉及将LKIK与全局KIK(GKIK)方法进行比较,后者作为主要基线。
对于主要比较,采用了四量子比特模拟,如图1所示。实验设计用于测量缓解期望值与理想值之间差异$\Delta(A)$,并以缓解阶数$M$为函数绘制。阶数$M=0$表示无缓解。测试了两种噪声强度参数:较弱的噪声场景$\xi = 0.02$(图1a)和较强的噪声场景$\xi = 0.2$(图1b)。理想期望值设置为约0.025。“受试者”在此比较中是GKIK(表示为“1 Layer (GKIK)”)和具有不同层数(2、4、10、20层)的LKIK。这种设置允许在不同噪声条件下直接比较增加LKIK层数如何影响缓解性能。
为了专门展示残余误差的尺度,图3展示了相同的四量子比特电路(如图1a所示)的数值实验,但这次绘制了固定缓解阶数(七)下误差作为层数$L$的函数。这对于验证薄层误差呈$1/L^2$依赖性的理论预测至关重要。
此外,本文还讨论了LKIK与动态电路的兼容性,这是一个关键优势。图4展示了一项数值模拟,将具有中途测量和前馈的动态电路的LKIK缓解与非动态的酉演化电路进行了比较。两种场景都使用了10层和噪声参数$\xi = 0.1$。这项实验旨在明确表明LKIK在复杂的动态环境中表现同样出色,而GKIK先前因与中途测量不兼容而失败。
虽然本文主要关注LKIK的数值证据和解析推导,但它在其“方法”部分引用了对KIK原理的两次实验演示。补充说明1描述了在离子阱量子计算机(IBEX - AQT)上的实验,该实验通过在$R_{xx}(\pi/2)$门电路中人为引入时间超旋转来演示KIK方法的漂移弹性。补充说明2详细介绍了在IBM超导设备(ibm_jakarta)上的实验,该实验验证了由门插入引起的噪声放大不正确的问题,而LKIK旨在解决这个问题。LKIK在动态量子电路中缓解误差的有效性的实验验证明确指出将在配套论文[62]中呈现。
What the Evidence Proves
本文提出的数值证据为分层KIK(LKIK)相对于全局KIK(GKIK)的优势提供了令人信服的证明,并解决了先前量子纠错(QEM)方案的几个关键限制。
首先,图1中的模拟无疑表明,LKIK在减小缓解期望值与理想值之间的偏差$\Delta(A)$方面显著优于GKIK。对于弱噪声($\xi = 0.02$)和强噪声($\xi = 0.2$)场景,增加LKIK的层数会导致缓解期望值的偏差大幅减小。例如,在图1a中,当$\xi = 0.02$时,GKIK(1层)的误差在$10^{-3}$左右趋于平稳,而LKIK(20层)在更高的缓解阶数下实现了低于$10^{-5}$的误差。这有力地证明了基于层的噪声放大机制有效地抑制了GKIK无法解决的误差。图1中的虚线代表了分层KIK公式(方程30)的预测,与模拟结果吻合良好,进一步验证了底层的数学模型。
其次,本文为LKIK具有足够层数时的无偏差特性提供了有力证据。图3绘制了缓解阶数为七时误差与层数的关系,清楚地显示误差的尺度为$1/L^2$。红色圆点(模拟结果)与灰色$1/L^2$曲线的良好拟合证实了理论预测(方程34)。这种尺度是关键的数学声明,证明了随着电路分成更多的层,来自高阶Magnus噪声项的残余偏差会迅速减小,从而使LKIK在实践中几乎无偏差。这直接解决了GKIK的一个主要限制,即由于未考虑的高阶Magnus项而产生的微小残余误差。
第三,LKIK与动态电路(包括中途测量(MCM)和前馈)的兼容性是一项重大突破。图4显示,LKIK对于动态电路(蓝色曲线)和非动态的酉演化电路(绿色曲线)表现同样出色。在这两种情况下,误差$\Delta(A)$都随着缓解阶数的增加而趋近于零。这是一个确凿的证据,表明LKIK克服了GKIK与MCMs的不兼容性,而MCMs对于量子纠错(QEC)协议至关重要。这使得LKIK成为复杂、现实世界量子计算的可行QEM方法。
最后,虽然本文中没有直接展示新的实验结果,但文本强调LKIK继承了原始KIK协议的漂移弹性,如补充说明1所示。这意味着该方法的性能对噪声参数的时间变化具有鲁棒性,这是长时间运行的量子实验的关键特性。无偏差操作、动态电路兼容性和漂移弹性的结合,使得LKIK成为一种强大而通用的QEM方法。
Limitations & Future Directions
虽然分层KIK(LKIK)协议在量子纠错方面取得了重大进展,但认识到其当前局限性并考虑未来发展方向至关重要。
一个直接的局限性是,这篇论文是“在线发表的文章”,意味着它是一个未经编辑的版本,可能包含错误。从技术角度来看,虽然LKIK被设计成漂移弹性且无偏差,但它依赖于基于脉冲的逆协议(KIK组件),在所有量子计算平台和门类型上可能并非普遍易于实现。特别是,本文指出,为固定或可调耦合器相位门[72]实现脉冲逆“不太直接”。这表明硬件级别的控制和校准仍然是广泛适用的实际挑战。
另一个需要考虑的方面是采样开销。尽管LKIK(特别是具有自适应系数时)可以降低与其他方法相比的采样成本,但它仍然会产生非微不足道的开销。本文提到“对于漂移弹性的QEM协议来说,数万次或更多的采样开销是现实的。”虽然这被认为是现实的,但它仍然代表了显著的资源成本,特别是随着电路复杂性的增加。与多变量外推(MVE)的比较也表明,尽管MVE的深度开销较小,但其“采样开销显著大于”单层泰勒(SLT)与GKIK相比,这表明优化运行时和采样效率仍然是一个关键领域。
此外,LKIK的理论误差尺度$1/L^2$依赖于“足够薄、均匀间隔的层”的假设。虽然本文表明与均匀性的偏差仅轻微影响较粗略的$1/L$界限,但在实践中实现最佳$1/L^2$尺度可能需要仔细的电路分解和脉冲级控制。LKIK在动态量子电路中的实验验证,如前所述,主要在配套论文[62]中进行,这意味着本文中所有声明的直接实验证据并不完全详尽。
展望未来,出现了几个令人兴奋的讨论主题和研究方向:
-
更深入的QEC-QEM集成: LKIK与中途测量的无缝兼容性为真正鲁棒的混合QEC-QEM协议打开了大门。未来的工作可以专注于设计和实验演示集成系统,其中QEC处理主要的局部、非相关误差,然后LKIK缓解残余的、更难纠正的误差,如泄漏、相关和相干误差。这可以显著推动容错量子计算的边界。
-
优化层分解和自适应系数: 对于给定的量子电路和噪声剖面,如何最优地确定层数($L$)和结构?研究可以探索动态调整$L$的层分解自适应算法,以最小化总开销同时满足目标精度。对自适应后处理技术(在本工作中被推迟)的进一步开发对于用更少的采样次数和电路实现更强的缓解至关重要。
-
特定硬件实现和脉冲工程: 研究在不同量子硬件架构(例如,超导、离子阱、光子)上为各种门集实现脉冲逆操作的具体挑战和解决方案。这可能涉及先进的脉冲整形技术,以缓解薄层中的泄漏噪声和激发,确保该方法在各种平台上的实用性。
-
非马尔可夫效应的缓解: 虽然Pauli扭曲和伪扭曲可以在应用KIK之前处理非马尔可夫噪声,但探索直接将非马尔可夫噪声模型纳入LKIK框架本身的方法,可能会带来更强大、更通用的缓解策略。这需要对非马尔可夫动力学如何在分层电路中传播有更深入的理解。
-
与其他QEM方法的协同作用: 本文建议将LKIK与基于表征的方法(PEC、PEA、机器学习)结合起来处理噪声的“主体”,让LKIK专注于漂移和稀疏噪声模型之外的误差。未来的研究可以系统地探索这些混合方法,量化采样开销、漂移弹性和整体性能的权衡。例如,将LKIK与张量纠错(TEM)结合,可能产生一种比单独使用LKIK具有更小采样开销的噪声漂移弹性解决方案。
-
运行时开销和可扩展性: 对LKIK运行时开销进行详细分析和实验验证,特别是与其他先进QEM方法(如MVE)相比,对于评估其实际可扩展性至关重要。探索跨多个量子处理器进行采样收集的并行化策略,可以进一步减少实际运行时间,使高采样开销更易于管理。
通过解决这些局限性并探索这些未来方向,LKIK框架有潜力成为嘈杂中等规模量子(NISQ)时代及以后可靠量子计算的基石。
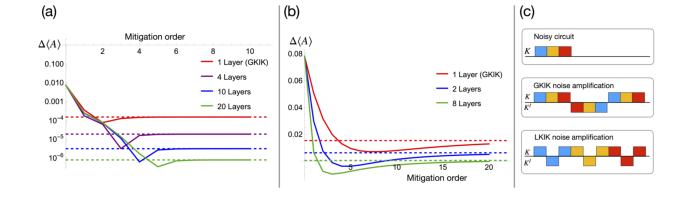 Figure 1. A four-qubit simulation demonstrating the advantage of using the layered-based KIK (LKIK) amplification over the global KIK amplification (GKIK - single layer). In (a) & (b) the y axis is the difference ∆⟨A⟩be- tween the mitigated expectation value (see main text) and the ideal value, and the x axis is the mitigation order M with M = 0 indicating no mitigation. The ideal expectation value is ⟨A⟩≃0.025. In (a) the noise strength parameter is ξ = 0.02 and in (b) it is ξ = 0.2. Fig. (a) shows that LKIK is essential for achiev- ing high accuracy even when the noise is weak, while Fig. (b) shows that LKIK is important when the noise is strong even when the requested target accuracy is modest. The dashed lines show the prediction of the Layered KIK formula (30). (c) An illustration of a three-layer circuit (top) being noise amplified with GKIK (middle) and LKIK (bottom). The amplification factor is three for both cases. Squares below the black horizontal line represent pulse-inverse operation
Figure 1. A four-qubit simulation demonstrating the advantage of using the layered-based KIK (LKIK) amplification over the global KIK amplification (GKIK - single layer). In (a) & (b) the y axis is the difference ∆⟨A⟩be- tween the mitigated expectation value (see main text) and the ideal value, and the x axis is the mitigation order M with M = 0 indicating no mitigation. The ideal expectation value is ⟨A⟩≃0.025. In (a) the noise strength parameter is ξ = 0.02 and in (b) it is ξ = 0.2. Fig. (a) shows that LKIK is essential for achiev- ing high accuracy even when the noise is weak, while Fig. (b) shows that LKIK is important when the noise is strong even when the requested target accuracy is modest. The dashed lines show the prediction of the Layered KIK formula (30). (c) An illustration of a three-layer circuit (top) being noise amplified with GKIK (middle) and LKIK (bottom). The amplification factor is three for both cases. Squares below the black horizontal line represent pulse-inverse operation
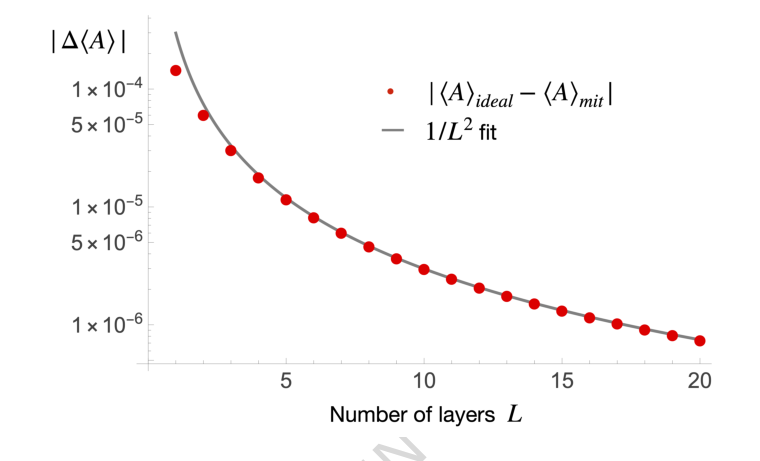 Figure 3. For the same example as in Fig. 1a, the error with respect to the ideal expectation value (red dots) is plotted for order seven as a function of number of layers. The good fit to the 1/L2 curve confirms the prediction of Eq. (34)
Figure 3. For the same example as in Fig. 1a, the error with respect to the ideal expectation value (red dots) is plotted for order seven as a function of number of layers. The good fit to the 1/L2 curve confirms the prediction of Eq. (34)