동적 회로를 위한 계층형 KIK 양자 오류 완화
Layered KIK works with mid-circuit measurements & error correction for super reliable quantum computers.
배경 및 학술적 계보
기원 및 학술적 계보
본 논문에서 다루는 문제는 노이즈가 많은 중간 규모 양자(NISQ) 시대 및 그 이후에 신뢰할 수 있는 양자 컴퓨터를 구축하는 지속적인 과제에서 비롯된다. 양자 오류 정정(QEC)은 내결함성 양자 컴퓨팅의 궁극적인 목표이지만, 상당한 하드웨어 오버헤드, 특히 큐비트 수의 상당한 증가를 요구한다. 이는 현재 및 근미래 장치에 QEC를 비현실적으로 만든다.
더 즉각적이고 실용적인 해결책으로 양자 오류 완화(QEM)가 등장했다. QEM은 QEC의 광범위한 하드웨어를 요구하지 않고 양자 계산 결과에 대한 노이즈의 영향을 줄이는 것을 목표로 한다. 대신, QEM은 일반적으로 런타임 비용을 발생시키며, 이는 원하는 정확도를 달성하기 위해 필요한 "샷"(반복) 수의 증가로 나타난다. 그러나 QEM 자체도 확장성 문제에 직면해 있다. 샘플링 오버헤드는 회로 볼륨이 증가함에 따라 기하급수적으로 증가하여 약 백 큐비트까지의 회로에 대한 적용 가능성을 제한한다.
많은 초기 QEM 접근 방식의 중요한 "고충점"은 노이즈 드리프트에 대한 민감성이었다. 디코히어런스 시간 또는 코히런트 오류 크기와 같은 양자 시스템의 노이즈 매개변수는 종종 실험 중에 변동한다. QEM 방법은 실험 실행 시간을 상당히 늘릴 수 있으므로 이러한 시간적 노이즈 드리프트는 최종 결과를 상당히 저하시킬 수 있다. 특성화 기반 QEM 방법은 노이즈 프로파일을 정확하게 학습하는 데 의존하므로 정확한 특성화에 필요한 시간이 노이즈 매개변수가 드리프트하는 속도와 충돌하기 때문에 특히 취약하다.
이는 제로 노이즈 외삽(ZNE) 및 적응형 KIK 프로토콜과 같은 불가지론적(특성화 없는) QEM 방법의 개발로 이어졌으며, 이는 본질적으로 노이즈 드리프트에 더 탄력적이다. 이전 연구 [61]에서 소개된 적응형 KIK 방법은 드리프트 탄력성, 비클리포드 게이트에 대한 적용 가능성 및 보장된 성능 경계로 인해 상당한 가능성을 보여주었다. 이는 QEC와 통합하기 위한 강력한 후보로 식별되었으며, QEC가 지배적인 국소 오류를 처리하고 QEM이 QEC가 어려움을 겪는 잔여, 상관 또는 코히런트 오류를 처리하도록 하는 하이브리드 QEC-QEM 접근 방식을 형성한다.
그러나 원래 적응형 KIK 프로토콜(글로벌 KIK 또는 GKIK라고 함)은 QEC 및 동적 회로와의 원활한 통합을 방해하는 두 가지 근본적인 한계를 가지고 있었다.
1. 중간 회로 측정(MCM)과의 비호환성: MCM은 QEC 프로토콜에서 증후군 측정을 실행하는 데 필수적이며, 계산 중에 오류를 감지하고 수정할 수 있다. GKIK의 글로벌 노이즈 증폭 전략은 이러한 중간 측정과 호환되지 않았다.
2. 고차 매그너스 노이즈 항으로 인한 잔여 편향: GKIK 공식은 매그너스 전개의 고차 항을 무시했으며, 이는 특히 강한 노이즈를 처리하거나 매우 높은 정확도가 요구될 때 작지만 상당한 편향을 도입할 수 있다. 이 편향은 부정확한 완화 결과로 이어질 수 있다.
이러한 한계로 인해 저자들은 계층 기반 노이즈 증폭 접근 방식을 채택하여 이러한 장애물을 극복하도록 특별히 설계된 계층형 KIK(LKIK) 방법을 개발해야 했으며, 이는 동적 회로 및 중간 회로 측정과 호환되며 고차 매그너스 노이즈 항을 더 효과적으로 처리한다.
직관적인 도메인 용어
-
양자 오류 완화(QEM):
- 직관적인 비유: 약간 흐릿한 카메라로 매우 선명한 사진을 찍으려고 한다고 상상해 보라. QEM은 여러 장의 사진을 찍고, 의도적으로 일부 사진을 제어된 방식으로 더 흐릿하게 만든 다음, 특별한 컴퓨터 프로그램을 사용하여 이를 결합하여 완벽하게 선명한 사진이 어떻게 보였을지 추측하는 것과 같다. 카메라 렌즈를 고치는 것이 아니라, 결함에도 불구하고 더 나은 사진을 얻는 것이다.
-
양자 오류 정정(QEC):
- 직관적인 비유: 세 개의 별도 종이에 비밀 메시지를 적어 세 명의 다른 메신저에게 전달하는 것을 생각해 보라. 한 메신저가 종이를 잃어버리거나 얼룩이 묻으면 다른 두 명으로부터 원래 메시지를 복구할 수 있다. QEC는 메신저의 종이가 손상되었는지 알려줄 뿐만 아니라 이를 수정하거나 교체하는 데 도움이 되는 시스템과 같다. 메시지가 항상 완벽하게 도착하도록 보장하지만, 더 많은 리소스(더 많은 종이, 더 많은 메신저)가 필요하다.
-
동적 회로:
- 직관적인 비유: 이전 맛 테스트 결과에 따라 다음 단계가 결정되는 레시피를 고려해 보라. 수프가 너무 짜면("중간 회로 측정" 결과), 물을 더 추가한다("게이트" 연산). 적절하면 다음 재료로 넘어간다. 동적 회로는 미리 정해진 고정된 순서를 따르는 대신, 계산 중에 수행된 측정을 기반으로 경로 또는 연산을 변경할 수 있는 양자 프로그램이다.
-
노이즈 드리프트 탄력성:
- 직관적인 비유: 움직이는 보트 위에서 직선을 그리려고 할 때, "노이즈 드리프트 탄력성"은 당신의 그림 기술이 보트의 끊임없고 예측할 수 없는 흔들림에 적응하여 여전히 직선을 만들 수 있음을 의미한다. 보트를 멈추거나 움직임을 끊임없이 다시 측정할 필요가 없으며, 변화하는 조건에도 불구하고 직선을 유지한다.
-
매그너스 전개:
- 직관적인 비유: 초기 타격뿐만 아니라 테이블의 작은 결함, 약간의 공기 저항, 공의 회전을 고려하여 당구공의 정확한 궤적을 예측하려고 한다고 상상해 보라. 매그너스 전개는 이러한 결함에 대한 점점 더 미묘한 수정을 추가하여 공의 경로를 설명하는 데 도움이 되는 수학적 도구이다. "고차 매그너스 노이즈 항"은 매우 작고 거의 감지할 수 없는 효과와 같으며, 작지만 공이 최종적으로 어디에 도달할지에 대한 극도로 정확한 예측이 필요한 경우 중요해질 수 있다.
표기법 표
| 표기법 | 설명 |
|---|---|
문제 정의 및 제약 조건
핵심 문제 공식화 및 딜레마
현재 양자 컴퓨팅 실험 환경은 노이즈로 인해 양자 회로에서 얻은 기대값에 편향을 도입한다. 양자 오류 완화(QEM)가 이를 해결하기 위한 실용적인 경로를 제공하지만, 글로벌 KIK(GKIK) 프로토콜을 포함한 기존 방법은 적용 가능성과 확장성을 방해하는 상당한 한계를 가지고 있다.
입력/현재 상태는 노이즈가 많은 양자 회로로 특징지어지며, GKIK 프로토콜은 드리프트 탄력성과 같은 장점에도 불구하고 몇 가지 치명적인 결함으로 어려움을 겪고 있다.
* 중간 회로 측정(MCM)과의 비호환성: GKIK의 "글로벌 노이즈 증폭"(2페이지)에 대한 의존성은 MCM(5페이지)과 근본적으로 호환되지 않는다. MCM은 동적 양자 회로에 필수적이며 양자 오류 정정(QEC) 프로토콜의 초석이다. 왜냐하면 이는 상태를 완전히 디코히어런스시키는 투영 측정과 관련되기 때문이다. 이를 글로벌 폴딩 프레임워크 내에서 "무한히 강한 노이즈"로 취급하면 투영 효과가 이상적인 동적 회로의 의도된 부분이며 완화되어서는 안 되기 때문에 부정확한 노이즈 증폭으로 이어진다(10페이지).
* 고차 매그너스 노이즈 항으로 인한 편향: GKIK 공식은 "고차 매그너스 노이즈 항"(2페이지)을 무시하여 완화된 기대값에 "작은 편향"을 초래한다(5페이지). 이 편향은 강한 노이즈를 처리하거나 "높은 정확도가 요구될 때"(10페이지) 상당해진다.
* 해밀토니안 역전의 어려움: GKIK는 "유효 해밀토니안의 부호 역전"을 요구하며, 이는 특정 양자 컴퓨팅 플랫폼에서 "구현하기 쉽지 않다"(9페이지).
또한, QEC와의 통합을 고려할 때 특성화 기반 QEM 방법은 자체적인 문제에 직면한다. 논리 큐비트, QEC의 출력은 "미세한" 오류율을 나타낸다(5페이지). 이러한 미세한 오류를 완화를 위해 특성화하는 것은 "시간이 많이 걸리고" "높은 정확도의 노이즈 특성화"를 요구하여(4-5페이지) 이러한 통합을 비현실적으로 만든다.
원하는 종점(출력/목표 상태)은 "동적 회로"에서 게이트 오류 완화를 위한 "드리프트 탄력적이고 편향 없는" QEM 방법이다(9페이지). 구체적으로, 이 방법은 다음을 수행해야 한다.
* "중간 회로 측정과 호환"되어야 한다(2페이지, 5페이지).
* "설명되지 않은 고차 매그너스 노이즈 항으로 인한 잔여 오류"를 효과적으로 억제하여(2페이지) 강한 노이즈 시나리오에서도 높은 정확도를 보장해야 한다.
* "양자 오류 정정 코드와의 원활한 통합"을 가능하게 하여(2페이지), QEC가 지배적인 노이즈를 처리하는 동안 QEM이 QEC가 어려움을 겪는 잔여 및 상관 오류를 처리하도록 해야 한다.
* 원래 GKIK 프로토콜에 비해 "추가 오버헤드나 실험적 복잡성을 발생시키지 않고" 이러한 개선을 달성해야 한다(2페이지, 9페이지).
* "층 수를 조정하여" 잔여 완화 오류를 "목표 실험 정확도" 아래로 줄일 수 있어야 한다(17페이지).
현재 상태와 원하는 종점 사이의 정확한 누락된 연결 또는 수학적 격차는 MCM을 통합하면서 완화 프로세스를 손상시키거나 과도한 오버헤드를 발생시키지 않고 $\Omega_2$ 편향을 체계적으로 처리하고 MCM을 통합할 수 있는 QEM 프로토콜을 개발하는 데 있다. 본 논문은 이 격차를 해소하기 위해 "KIK의 계층 기반 적용"(LKIK)을 제안한다. 수학적으로 GKIK의 성능은 전체 회로의 두 번째 순서 매그너스 항 $\Omega_2^G$에 의해 제한된다(17페이지). LKIK 접근 방식은 $\Omega_2$에 대한 계층 간 교환자 기여를 제거하고 층 수를 늘려 나머지 $\Omega_2$ 기여를 무시할 수 있도록 하여 편향 없는 작동을 달성하는 것을 목표로 한다(17페이지). 과제는 MCM의 기능을 보존하고 고차 노이즈 항을 상쇄하면서 각 계층에 대해 노이즈를 올바르게 증폭하도록 이 계층 기반 접근 방식을 공식화하는 것이다.
이 특정 문제를 해결하려는 이전 연구자들을 가두었던 고통스러운 절충 또는 딜레마는 여러 가지 방식으로 나타난다.
1. QEM 런타임 대 노이즈 드리프트: 많은 QEM 프로토콜은 실험의 런타임을 크게 증가시키며, 이는 "시간적 노이즈 드리프트"(4페이지)의 영향을 증폭시킨다. 노이즈 특성화에 의존하는 방법은 특성화가 긴 실험 실행 중에 오래되므로 특히 취약하다(4페이지).
2. 특성화 기반 QEM과의 QEC 통합: QEC와 QEM을 결합하려는 욕구는 강하지만, 특성화 기반 QEM은 효율적인 학습을 위해 오류가 충분히 두드러지고 구조가 단순해야 한다. 이는 논리 큐비트에서 예상되는 "미세한" 복잡한 오류와 충돌하여 "시간이 많이 걸리는 고정밀 노이즈 특성화"(4-5페이지)로 이어진다. 이는 QEC를 개선하면 QEM 통합이 더 어려워지는 딜레마를 만든다.
3. GKIK의 글로벌 증폭 대 중간 회로 측정: GKIK의 노이즈 증폭의 글로벌 특성은 MCM의 국소적이고 상태 투영적인 특성과 근본적으로 충돌한다. MCM은 동적 회로 및 QEC의 필수적인 부분이지만, GKIK의 프레임워크는 이를 올바르게 처리할 수 없어 MCM을 역전시켜야 하는 회로의 일부로 취급하면 "부정확한 노이즈 증폭"으로 이어진다(10페이지). 이는 GKIK와 QEC-QEM 통합을 달성하는 데 핵심적인 딜레마다.
4. 정확도/노이즈 강도 대 샘플링 비용: GKIK로 높은 정확도를 달성하거나 강한 노이즈를 완화하려면 "고차 매그너스 노이즈 항"을 고려해야 한다. 그러나 이러한 항을 처리하는 데 필요한 샘플링 비용은 "비현실적"(10페이지)이 될 수 있으며, 원하는 성능과 실험적 타당성 간의 절충을 만든다.
제약 조건 및 실패 모드
동적 회로를 위한 강력한 양자 오류 완화 문제는 몇 가지 혹독하고 현실적인 장벽으로 인해 "극도로 어렵게" 만들어진다.
-
물리적 제약:
- 해밀토니안 역전 복잡성: GKIK 방법은 "유효 해밀토니안의 부호 역전"(9페이지)을 요구한다. 이는 보편적으로 간단한 연산이 아니며, 특히 복잡한 게이트나 아키텍처의 경우 다양한 양자 컴퓨팅 플랫폼에서 구현하기 어려울 수 있다.
- 얇은 계층을 위한 제어 전자 장치 속도: LKIK는 이점을 제공하지만, "얇은 계층"(즉, 회로를 여러 개의 작은 세그먼트로 분할)을 사용하면 더 빈번한 구동 해밀토니안의 부호 변경으로 인해 "더 빠른 제어 전자 장치"가 필요할 수 있다(25페이지). 이는 계층의 세분성에 대한 하드웨어 제한을 부과한다.
- 얇은 계층에서의 누설 노이즈 및 여기: "얇은 계층"의 경우 "누설 노이즈 및 비계산 상태의 여기 가능성"(25페이지)이 증가한다. 이를 완화하려면 추가적인 펄스 성형 기술이 필요하며 실험 설정에 복잡성을 더한다.
-
계산/샘플링 제약:
- QEM의 기하급수적 샘플링 오버헤드: KIK를 포함한 대부분의 QEM 방법은 회로 볼륨이 "기하급수적으로" 증가하는 "샘플링 오버헤드"를 발생시킨다(3페이지). 이는 상대적으로 적은 수의 큐비트(예: 초전도 회로에서 백 개까지)를 가진 회로에 대한 적용 가능성을 제한한다.
- 시간이 많이 걸리는 노이즈 특성화: 특성화 기반 QEM 방법은 노이즈 매개변수에 대한 정확한 지식이 필요하다. 논리 큐비트의 "미세한" 오류의 경우, 이는 "시간이 많이 걸리는 고정밀 노이즈 특성화"(4-5페이지)로 이어져 실시간 응용 프로그램이나 대규모 회로에 비현실적이다.
- 고정확도를 위한 비현실적인 샘플링 비용: 노이즈가 강하거나 "매우 높은 정확도가 필요한" 경우, 고차 매그너스 노이즈 항을 고려하는 데 필요한 샘플링 비용은 "비현실적"(10페이지)이 될 수 있다.
- 단순 계층별 완화에 대한 기하급수적 오버헤드: 각 계층을 독립적으로 완화하는(예: 각 계층에 대한 완화된 진화 연산자를 곱하는) 단순한 접근 방식은 "계층 수에 따라 기하급수적으로 증가하는"(22페이지) 샘플링 오버헤드를 초래한다. 예를 들어, 10개 계층의 1차 완화는 약 백만($2^{20}$) 샷이 필요할 수 있으며, 이는 종종 금지된다.
-
데이터 기반 제약:
- 시간적 노이즈 드리프트: 양자 프로세서의 노이즈 매개변수는 정적이지 않으며, 온도 변동, 외부 전자기장 또는 2준위 시스템 결함과 같은 요인으로 인해 "일반적으로 시간이 지남에 따라 변동"(4페이지, 6페이지)한다. QEM 실험은 "수십 시간 이상" 실행될 수 있으므로 이러한 드리프트는 완화의 정확도에 상당한 영향을 미칠 수 있다(6페이지).
- 특성화 기반 QEM에 대한 요구 사항: 특성화 기반 방법이 효과적이려면 오류가 "합리적인 시간 내에 적절한 정확도로 학습될 수 있을 만큼 충분히 두드러지고 노이즈 구조가 소수의 매개변수를 사용하여 설명될 만큼 충분히 단순해야"(4-5페이지) 한다. 이러한 조건은 특히 논리 큐비트의 경우 종종 충족되지 않는다.
- 노이즈가 많은 중간 회로 측정: 실제 양자 시스템에서 MCM은 "종종 노이즈가 많아" "잘못된 게이트 실행으로 이어질 수 있다"(15페이지). 이는 해결해야 할 또 다른 오류 계층을 도입하여 동적 회로를 복잡하게 만든다.
실패 모드 (이러한 제약 조건이 극복되지 않거나 이전 방법이 사용되는 경우):
* 성능 저하: QEM 프로토콜이 노이즈 드리프트에 탄력적이지 않으면 최종 결과에 상당한 영향을 미쳐 신뢰할 수 없는 결과로 이어진다(4페이지).
* 부정확한 결과: 이상적인 유니터리와 가환하지 않는 노이즈가 있는 경우 게이트 삽입을 사용하여 노이즈를 증폭하는 방법을 사용하면 "부정확한 증폭"과 편향된 결과가 발생한다(8페이지, 20페이지).
* QEC 통합 불가: GKIK와 MCM의 비호환성으로 인해 증후군 측정에 크게 의존하는 QEC를 원활하게 통합할 수 없어 전반적인 오류 억제 능력이 제한된다(5페이지, 10페이지).
* 달성 불가능한 정확도: GKIK에서 고차 매그너스 항을 무시하면 강한 노이즈를 완화하거나 매우 높은 정확도를 달성하는 것이 "비현실적인" 샘플링 비용을 발생시키지 않고는 불가능해진다(10페이지).
* 확장성 병목 현상: 많은 QEM 방법의 기하급수적 샘플링 오버헤드는 해결되지 않으면 더 크고 복잡한 양자 회로에 적용할 수 없게 되어 양자 컴퓨팅의 확장성을 제한한다(3페이지).
왜 이 접근 방식인가
선택의 불가피성
계층형 KIK(LKIK) 접근 방식은 이전에 가장 유망했던 글로벌 KIK(GKIK) 프로토콜을 포함한 이전 양자 오류 완화(QEM) 방법의 치명적인 한계를 직접적으로 해결함으로써 유일하게 실행 가능한 해결책으로 등장한다. 전통적인 "최첨단"(SOTA) 방법, 즉 특성화 기반 QEM(예: 확률적 오류 제거, 클리포드 회귀, 기계 학습)은 본질적으로 시간적 노이즈 드리프트에 민감하기 때문에 불충분한 것으로 간주되었다. 양자 시스템의 노이즈 매개변수는 일반적으로 시간이 지남에 따라 변동하며, QEM 방법으로 인해 발생하는 상당한 샘플링 오버헤드는 실험이 수십 시간 동안 실행될 수 있음을 의미하므로 이러한 드리프트는 상당한 장애물이 된다(4페이지, 6페이지). 또한, 특성화 기반 방법은 논리 큐비트에서 예상되는 미세한 오류율로 어려움을 겪어 비현실적으로 긴 특성화 시간과 양자 오류 정정(QEC) 요구 사항과의 비호환성으로 이어진다(5페이지).
펄스 스트레칭 제로 노이즈 외삽(ZNE)은 복잡한 보정 및 코히런트 오류를 잘못 확장하는 트윌링 기술과 호환되지 않는다. 디지털 ZNE는 노이즈가 이상적인 유니터리 연산과 가환하지 않을 때 강한 오류 편향으로 어려움을 겪는다. NOX는 1차 완화 이론이므로 약한 노이즈 시나리오로 제한된다(4페이지).
적응형 KIK 방법(GKIK)은 드리프트 탄력적 QEM 및 QEC 통합을 위한 강력한 후보로 식별되었으며, 비강한 노이즈에 대한 수렴 보장을 제공한다. 그러나 GKIK 자체는 보편적인 적용 가능성을 방해하는 두 가지 치명적인 고유 장애물을 가지고 있었다.
1. 중간 회로 측정(MCM)과의 비호환성: MCM은 QEC 프로토콜에서 증후군 측정을 실행하는 데 필수적이다. GKIK의 글로벌 폴딩 접근 방식은 MCM을 상태를 완전히 디코히어런스시키는 "무한히 강한 노이즈"로 취급하여 이상적인 동적 회로 기능을 수정하지 않고는 프레임워크 내에서 이를 완화할 수 없게 한다(5페이지, 10페이지).
2. 고차 매그너스 노이즈 항으로 인한 잔여 편향: GKIK는 설명되지 않은 고차 매그너스 전개 보정으로 인해 작지만 상당한 편향을 나타냈다. 이 편향은 노이즈가 강하거나 높은 정확도가 요구될 때 문제가 된다(5페이지, 9페이지, 10페이지).
저자들은 KIK의 중요한 드리프트 탄력성 및 불가지론적 특성을 유지하면서 이러한 두 가지 특정 장애물을 동시에 극복하려면 계층 기반 적용이 필요하다는 것을 깨달았다. 이 깨달음은 LKIK를 개발하게 했으며, 이는 이러한 문제를 해결하고 진정으로 드리프트 탄력적이고 편향 없는 QEC-QEM 프로토콜을 향한 길을 열도록 명시적으로 설계되었다(9페이지).
비교 우위
계층형 KIK(LKIK)는 주로 향상된 편향 억제와 동적 회로와의 본질적인 호환성을 통해 글로벌 KIK(GKIK)를 포함한 이전 방법보다 질적으로 우수하다.
첫째, LKIK는 편향 억제를 크게 개선한다. GKIK는 효과적이었지만 고차 매그너스 노이즈 항으로 인한 잔여 편향으로 어려움을 겪었다(5페이지, 10페이지). LKIK는 회로를 계층으로 나누고 계층별로 KIK 증폭을 적용함으로써 이러한 고차 보정을 체계적으로 억제한다. 분석에 따르면 계층 간 교환자(그림 2의 사각형 영역)의 기여가 제거되고 계층별 2차 매그너스 항(그림 2의 파란색 삼각형)은 계층 수($L$)가 증가함에 따라 무시할 수 있게 된다(17페이지, 18페이지). 이는 실질적으로 "편향 없는" 방법으로 이어져, 어떤 목표 정확도에 대해서도 충분히 큰 $L$을 선택하여 잔여 편향을 목표 실험 정확도 아래로 줄일 수 있다(18페이지). 정량적으로 얇은 계층의 경우 잔여 오류는 $1/L^2$로 확장되며(19페이지, 그림 3), 이는 $1/L$의 거친 경계보다 "상당히 빠르며" 오류 감소에서 우수한 구조적 이점을 보여준다.
둘째, LKIK의 설계는 중간 회로 측정(MCM) 및 동적 회로를 본질적으로 지원하며, 이는 GKIK에 비해 중요한 구조적 이점이다. GKIK의 글로벌 폴딩 접근 방식은 MCM과 호환되지 않았다. 왜냐하면 MCM은 이상적인 회로를 손상시키지 않고는 전역적으로 역전시키거나 증폭할 수 없는 투영 연산을 나타내기 때문이다(10페이지). LKIK는 MCM을 완화되지 않는 스케일링되지 않은 함수로 취급하여 이를 극복하며, 이는 동적 회로 내에서 이상적인 기능을 보존한다(15페이지, 방정식 22, 23, 그림 4). 동적 회로, 특히 QEC 코드는 MCM에 크게 의존하기 때문에 이는 중요한 차이점이다.
마지막으로, LKIK는 원래 KIK 프로토콜의 핵심 이점인 드리프트 탄력성을 유지한다. 이는 디코히어런스 시간 또는 코히런트 오류의 변경과 같은 노이즈 매개변수의 시간적 변동을 성능 저하 없이 처리할 수 있음을 의미한다(4페이지, 8페이지). 이는 특성화 기반 QEM 방법에 비해 상당한 질적 이점이며, 본질적으로 이러한 드리프트에 민감하다(4페이지, 6페이지). 드리프트 탄력성, 편향 없는 작동 및 MCM 호환성의 조합으로 인해 LKIK는 QEC와 QEM을 통합하고 노이즈가 많은 중간 규모 양자(NISQ) 시대의 일반적인 동적 회로에 대해 압도적으로 우수하다.
제약 조건과의 정렬
계층형 KIK(LKIK) 방법은 동적 회로를 위한 양자 오류 완화의 혹독한 요구 사항과 완벽하게 정렬되어 문제의 제약 조건과 솔루션의 고유한 속성을 효과적으로 결합한다.
-
동적 회로 및 중간 회로 측정(MCM)과의 호환성: 주요 제약 조건은 QEC에 필수적인 MCM을 포함한 모든 동적 회로에 적용 가능한 QEM 방법을 개발하는 것이었다. GKIK는 글로벌 폴딩 접근 방식으로 인해 여기서 실패했다(5페이지, 10페이지). LKIK의 계층 기반 증폭 체계는 이를 직접적으로 해결한다. 각 계층에 KIK 증폭을 적용함으로써 MCM은 완화되지 않는 스케일링되지 않은 연산으로 통합될 수 있어 동적 회로 내에서 이상적인 기능을 보존한다(15페이지, 방정식 22, 23). 이는 LKIK가 MCM 및 피드포워드를 포함하는 동적 회로와 유니터리 진화에 대해 동등하게 잘 수행됨을 보여주는 수치 시뮬레이션에서 입증된 것처럼 핵심적인 이점이다(그림 4, 21페이지).
-
드리프트 탄력성: QEM 프로토콜의 주요 바람직한 기능은 실험 중에 노이즈 매개변수가 변동하는 노이즈 드리프트에 대한 탄력성이다(4페이지). LKIK는 이 중요한 속성을 KIK 프로토콜에서 상속한다. 실험 순서는 시간적 노이즈 드리프트 효과를 제거하도록 특별히 구성되어 노이즈 매개변수가 변동하더라도 방법의 성능이 저하되지 않도록 보장한다(8페이지, 9페이지). 이는 실제 드리프트하는 양자 하드웨어에서 안정적으로 작동하는 제약 조건을 직접적으로 해결한다.
-
고차 노이즈 항 완화 및 편향 없는 작동: 고정밀 QEM의 중요한 제약 조건은 GKIK를 괴롭혔던 고차 노이즈 항의 잔여 오류 존재이다(5페이지, 10페이지). LKIK의 계층 기반 접근 방식은 이러한 항을 체계적으로 억제한다. 계층 간 교환자의 기여를 제거하고 충분한 수의 계층으로 계층별 2차 매그너스 항을 무시할 수 있게 함으로써 LKIK는 실질적으로 "편향 없는" 완화를 달성한다(17페이지, 18페이지). 잔여 오류는 얇은 계층의 경우 $1/L^2$로 확장되어, 적절한 수의 계층을 선택하여 완화 오류를 임의의 목표 실험 정확도 아래로 줄일 수 있도록 보장한다(19페이지). 이는 강한 노이즈가 있는 경우에도 높은 정확도 완화의 필요성을 직접적으로 해결한다.
-
양자 오류 정정(QEC)과의 원활한 통합: 궁극적인 목표는 불완전한 QEC를 겪는 회로에 대해 안정적이고 드리프트 탄력적인 오류 완화를 가능하게 하는 것이었다(3페이지). QEC 코드는 동적 회로의 인스턴스이므로 LKIK의 동적 회로 및 MCM과의 호환성은 QEC와의 원활한 통합을 가능하게 한다. 이를 통해 QEC는 지배적인 국소적, 비상관 오류를 처리하고 LKIK는 QEC가 처리하기 어려운 누설, 상관 및 코히런트 오류와 같은 잔여 오류를 처리할 수 있다(3페이지, 15페이지). 이 시너지는 양자 컴퓨팅 실험의 신뢰성을 향상시키려는 비전과 완벽하게 일치하는 강력한 하이브리드 접근 방식을 제공한다.
대안의 거부
본 논문은 동적 회로, 드리프트 탄력성 및 고정밀 요구 사항의 맥락에서 근본적인 한계를 강조하면서 다른 인기 있는 QEM 접근 방식의 거부에 대한 명확한 이유를 제공한다.
-
특성화 기반 QEM 방법(예: PEC, PEA, 클리포드 회귀, 기계 학습): 이러한 방법은 "시간적 노이즈 드리프트에 대한 본질적인 민감성"(4페이지, 6페이지)으로 인해 명시적으로 거부되었다. 양자 시스템의 노이즈 매개변수는 정적이지 않으며, QEM 실험의 긴 실행 시간 동안 상당히 변동할 수 있어 특성화 기반 접근 방식이 신뢰할 수 없게 된다. 학습된 노이즈 모델이 빠르게 오래되기 때문이다. 또한, 논리 큐비트에 이러한 방법을 적용하는 것은 "시간이 많이 걸리는 고정밀 노이즈 특성화"(5페이지)가 필요하며, 이는 비현실적이다. 또한 이러한 특성화 요구 사항으로 인해 QEC 통합에 문제가 있다.
-
제로 노이즈 외삽(ZNE) 방법(예: 펄스 스트레칭 ZNE, 디지털 ZNE, NOX):
- 펄스 스트레칭 ZNE는 "신중한 제어 및 보정 절차가 필요하며... 코히런트 오류를 잘못 확장하므로 트윌링 기술과 완전히 호환되지 않는다"(4페이지)는 점에서 문제가 있는 것으로 간주되었다. 이는 실용적인 적용 가능성과 특정 노이즈 유형에 대한 효과를 제한한다.
- 디지털 ZNE는 "노이즈가 이상적인 유니터리와 가환하지 않는 경우(일반적인 경우) 모든 완화 순서에서 강한 오류 편향"으로 어려움을 겪는다(4페이지). 본 논문은 "디지털 노이즈 증폭은 노이즈가 이상적인 게이트와 가환하는 드문 경우에만 올바르다"(7페이지)고 명시적으로 명시하여 일반적으로 부적합하다.
- NOX는 "1차 완화 이론이므로 약한 노이즈 시나리오로 제한된다"(4페이지)는 점에서 고정밀 또는 강한 노이즈 시나리오에 대해 거부되었다.
-
정화 방법: 이러한 접근 방식은 고려되었지만 "하드웨어 오버헤드를 포함하고 제한된 노이즈 모델에 국한된다"(6페이지)는 점에서 기각되었다. 목표는 추가 하드웨어 오버헤드 없이 더 넓은 적용 가능성을 가진 방법이었다.
-
글로벌 KIK(GKIK): GKIK는 드리프트 탄력적 QEM을 위한 강력한 후보였지만, 두 가지 치명적인 결함으로 인해 최종 해결책으로 궁극적으로 거부되었다(5페이지, 9페이지, 10페이지).
- 중간 회로 측정(MCM)과의 비호환성: GKIK의 글로벌 폴딩 메커니즘은 동적 회로 및 QEC 증후군 측정에 필수적인 MCM을 제대로 처리할 수 없다. MCM은 이상적인 회로를 손상시키지 않고 글로벌 폴딩 프레임워크 내에서 설명할 수 없는 "무한히 강한 노이즈" 역할을 한다(10페이지).
- 고차 매그너스 노이즈 항으로 인한 잔여 편향: GKIK는 작지만 지속적인 편향을 나타냈으며, 이는 강한 노이즈 또는 매우 높은 정확도가 요구될 때 중요해졌다(10페이지). 이 한계는 편향 없는 완화를 진정으로 달성할 수 없음을 의미했다.
계층형 KIK 접근 방식은 이러한 모든 기존 대안의 식별된 단점을 극복하기 위해 특별히 개발되었으며, 추가 하드웨어 오버헤드 없이 드리프트 탄력적이고 편향 없으며 동적 회로 호환 QEM 솔루션을 제공한다.
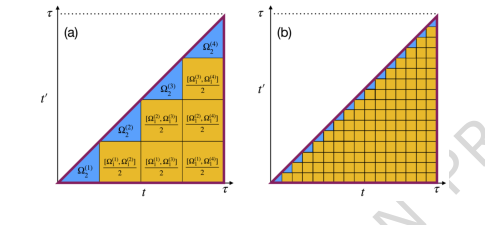 Figure 2. Local contributions to the global Ω2. (a) & (b) The performance of the global KIK introduced in [61] is limited by the second-order Magnus term of the entire circuit, ΩG 2 . ΩG 2 is calculated using a double integral whose inte- gration domain is depicted by the big triangle in (a). τ is the time duration of the unmitigated circuit. The same circuit can be described as a sequence of L consecutive layers (L = 4 in (a)). As a result, ΩG 2 can be divided into two different types of contributions: i) the blue triangles that arise from the Ω2 of each layer, and ii) the orange squares which originate from the Ω1 commutator of different layers. Crucially, we show that in the layered KIK protocol, the contribution of the squares is eliminated, leaving only the blue triangles con- tribution. Furthermore, as the layers get thinner (b), the contribution of the blue triangles becomes negligible. From this argument one can derive an upper bound on the LKIK mitigation error that scales as 1/L. Interestingly, when the layers are sufficiently thin, we find a tighter error bound that scales as 1/L2. As such, LKIK is bias-free in practice, since it is always possible to choose a sufficiently large L that guarantees that the residual mitigation error remains below the target experimental accuracy
Figure 2. Local contributions to the global Ω2. (a) & (b) The performance of the global KIK introduced in [61] is limited by the second-order Magnus term of the entire circuit, ΩG 2 . ΩG 2 is calculated using a double integral whose inte- gration domain is depicted by the big triangle in (a). τ is the time duration of the unmitigated circuit. The same circuit can be described as a sequence of L consecutive layers (L = 4 in (a)). As a result, ΩG 2 can be divided into two different types of contributions: i) the blue triangles that arise from the Ω2 of each layer, and ii) the orange squares which originate from the Ω1 commutator of different layers. Crucially, we show that in the layered KIK protocol, the contribution of the squares is eliminated, leaving only the blue triangles con- tribution. Furthermore, as the layers get thinner (b), the contribution of the blue triangles becomes negligible. From this argument one can derive an upper bound on the LKIK mitigation error that scales as 1/L. Interestingly, when the layers are sufficiently thin, we find a tighter error bound that scales as 1/L2. As such, LKIK is bias-free in practice, since it is always possible to choose a sufficiently large L that guarantees that the residual mitigation error remains below the target experimental accuracy
수학적 및 논리적 메커니즘
마스터 방정식
본 논문에서 제시된 계층형 KIK(LKIK) 양자 오류 완화 방법의 핵심 수학적 엔진은 선형 방식으로 증폭된 노이즈가 많은 회로를 결합하여 완화된 진화 연산자를 구성하는 데 중점을 둔다. $L$ 계층 및 최대 완화 순서 $M$에 대한 LKIK 완화 진화 연산자에 대한 중심 방정식은 다음과 같다.
$$ K_{\text{mit,LKIK}}^{(M)} = \sum_{j=0}^M a_j^{(M)} \prod_{l=1}^L K_l(K_l^I K_l)^j $$
이 완화된 연산자가 구성되면 초기 상태 $\rho_0$에 대한 관측량 $A$에 대한 최종 완화된 기대값은 다음과 같이 얻어진다.
$$ A_{\text{mit}}^{(M)} = \sum_{j=0}^M a_j^{(M)} \langle A | \left( \prod_{l=1}^L K_l(K_l^I K_l)^j \right) | \rho_0 \rangle $$
항별 분석
이러한 방정식을 분해하여 각 구성 요소를 이해해 보자.
-
$K_{\text{mit,LKIK}}^{(M)}$: 이는 계층형 KIK 완화 진화 연산자이며 순서 $M$이다.
- 수학적 정의: 증폭된 노이즈가 많은 계층 연산자의 곱에 대한 선형 조합이다.
- 물리적/논리적 역할: 이 연산자는 LKIK 완화 프로토콜을 적용한 후 이상적인 노이즈 없는 진화 연산자 $U$의 최적 추정치를 나타낸다. 목표는 양자 회로에 존재하는 노이즈를 효과적으로 "되돌리는" 것이다.
- 합산 이유: 합산은 노이즈 채널의 역함수에 대한 다항식 근사를 형성하는 데 사용된다. 합산의 각 항은 더 높은 순서의 보정에 기여하여 $M$이 증가함에 따라 더 정확한 완화를 가능하게 한다.
-
$M$: 이는 완화 순서를 나타낸다.
- 수학적 정의: 선형 조합에 포함된 노이즈 증폭의 최고 차수를 나타내는 정수이다.
- 물리적/논리적 역할: 더 높은 $M$은 노이즈 역함수에 대한 더 정교한 다항식 근사를 의미하며, 잠재적으로 더 나은 오류 완화를 초래하지만 샘플링 오버헤드도 증가한다.
-
$a_j^{(M)}$: 이는 선형 조합의 계수이다.
- 수학적 정의: 일반적으로 테일러 전개(4식의 테일러 계수) 또는 L2 노름을 최소화하여 적응적으로 결정되는 실수(61절 참조).
- 물리적/논리적 역할: 이러한 계수는 증폭된 노이즈가 많은 회로의 선형 조합이 이상적인 노이즈 없는 진화 연산자를 효과적으로 근사하도록 보장하는 데 중요하다. 이는 특정 순서까지 노이즈 항을 취소하도록 설계되었다. 본 논문은 주로 분석적으로 파생되고 학습되지 않는 테일러 계수에 중점을 둔다.
- 덧셈 이유: 계수는 다항식 근사를 위한 수학적 구조인 선형 조합을 형성하므로 더해진다.
-
$\prod_{l=1}^L$: 이는 계층에 대한 곱을 나타낸다.
- 수학적 정의: $l=1$부터 $L$까지 순서가 지정된 연산자의 순차적 구성이다.
- 물리적/논리적 역할: 이는 양자 회로가 $L$개의 별개의 비중첩 "계층"으로 분할됨을 의미한다. 전체 회로 진화는 이러한 계층 진화의 순차적 적용이다. 곱은 양자 역학에서 중요한 연산의 시간 순서를 존중하도록 보장한다.
-
$K_l$: 이는 계층 $l$에 대한 노이즈가 많은 진화 연산자이다.
- 수학적 정의: $l$번째 계층의 실제 불완전한 양자 진화를 설명하는 연산자(리우빌 공간에서), 이상적인 유니터리 연산과 노이즈를 모두 포함한다.
- 물리적/논리적 역할: 이것은 노이즈가 많은 회로의 기본 구성 요소이다. 완화하려는 대상이다.
-
$K_l^I$: 이는 $K_l$의 펄스 역함수이다.
- 수학적 정의: 계층 $l$에 대한 유효 상호작용 해밀토니안의 스케줄을 반전시키고 부호를 반전시켜 얻은 연산자이다.
- 물리적/논리적 역할: 펄스 역함수는 KIK 프로토콜의 중요한 구성 요소이다. 이는 $K_l$의 이상적인 부분 단위를 "되돌리는" 동시에 노이즈를 제어된 방식으로 보존하거나 증폭하도록 설계되었다. 이를 통해 노이즈가 증폭된 회로를 구성할 수 있다.
-
$(K_l^I K_l)^j$: 이 항은 계층 $l$에 대한 증폭된 노이즈를 증폭 계수 $j$에서 나타낸다.
- 수학적 정의: 연산자 $K_l^I K_l$을 $j$번 적용한 것이다.
- 물리적/논리적 역할: 곱 $K_l^I K_l$은 이상적인 부분이 항등원이지만 노이즈 부분이 증폭되도록 설계되었다. 이를 $j$번 반복하면 노이즈가 더욱 증폭된다. 이 제어된 증폭은 노이즈 증폭 기반 오류 완화의 핵심 아이디어이다.
-
$\langle A | \cdot | \rho_0 \rangle$: 이는 연산자의 기대값을 나타낸다.
- 수학적 정의: 리우빌 공간에서 연산자 $O$에 대해 기대값은 $\text{Tr}[A \cdot O(\rho_0)]$이며, 여기서 $A$는 관측량이고 $\rho_0$는 초기 상태이다. $\langle A | O | \rho_0 \rangle$ 표기법은 이를 표현하는 간결한 방법이다.
- 물리적/논리적 역할: 이는 양자 실험에서 관심 있는 최종 양, 즉 측정의 평균값이다. 완화의 목표는 이 값을 이상적인 노이즈 없는 기대값에 최대한 가깝게 만드는 것이다.
단계별 흐름
양자 계산을 복잡한 기계로, LKIK를 정교한 수리 및 보정 프로세스로 상상해 보라. 이 메커니즘을 통해 단일 추상 데이터 포인트(양자 상태를 나타냄)가 어떻게 흐르는지 살펴보자.
-
회로 분해: 먼저, 원하는 계산을 수행하지만 본질적으로 노이즈가 많은 전체 양자 회로가 개념적으로 $L$개의 더 작고 순차적인 "계층"($K_1, K_2, \dots, K_L$)으로 분해된다. 각 계층 $K_l$ 자체는 노이즈가 많은 연산이다.
-
계층별 노이즈 증폭: 각 개별 계층 $K_l$에 대해 프로토콜은 "증폭된" 버전 시리즈를 생성한다. 여기에는 "펄스 역함수" 회로 $K_l^I$를 생성하는 것이 포함되며, 이는 $K_l$의 이상적인 부분을 효과적으로 반전시키도록 설계되었다. 그런 다음 각 계층 $l$과 다양한 증폭 계수 $j$(0부터 $M$까지)에 대해 노이즈 증폭 블록 $(K_l^I K_l)^j$가 구성된다. $j=0$일 때 이 블록은 항등원이다. $j=1$일 때 $K_l^I K_l$이다.
-
증폭된 전체 회로로 재조립: 다음으로, 각 완화 순서 $j$에 대해 전체 길이의 양자 회로가 재조립된다. 이 재조립된 회로는 각 계층 $l$에 대해 원래 노이즈가 많은 계층 $K_l$와 노이즈 증폭 블록 $(K_l^I K_l)^j$를 연결하여 형성된다. 주어진 $j$에 대한 전체 회로는 $K_L(K_L^I K_L)^j \dots K_2(K_2^I K_2)^j K_1(K_1^I K_1)^j$와 같이 보인다. 이 프로세스는 각기 다른 수준의 노이즈 증폭을 가진 $M+1$개의 서로 다른 전체 회로를 생성한다.
-
실행 및 측정: 이렇게 특별히 구성된 $M+1$개의 회로 각각이 초기 상태 $\rho_0$에서 시작하여 양자 컴퓨터에서 실행된다. 각 실행에 대해 관측량 $A$의 기대값이 측정된다. 이는 일련의 원시 노이즈가 많은 기대값 $A_0^{\text{raw}}, A_1^{\text{raw}}, \dots, A_M^{\text{raw}}$을 생성한다.
-
후처리(선형 조합): 마지막으로, 이러한 원시 기대값은 클래식 컴퓨터로 전달된다. 여기서 미리 결정된 계수 집합 $a_j^{(M)}$을 사용하여 결합된다. 최종 완화된 기대값 $A_{\text{mit}}^{(M)}$은 가중 합으로 계산된다: $A_{\text{mit}}^{(M)} = \sum_{j=0}^M a_j^{(M)} A_j^{\text{raw}}$. 이 선형 조합은 필터 역할을 하여 증폭된 노이즈 항을 취소하여 실제 노이즈 없는 기대값의 더 나은 추정치를 제공한다.
최적화 역학
계층형 KIK(LKIK)의 "최적화"는 수렴 및 편향 감소를 위해 설계된 전략적 구성 및 후처리 체계이지, 일반적인 기계 학습의 연속적인 반복 학습 프로세스가 아니다.
-
노이즈 역전을 위한 다항식 근사: 기본 아이디어는 노이즈 채널의 역함수 $N^{-1}$을 다항식 전개를 사용하여 근사하는 것이다. 계수 $a_j^{(M)}$는 선형 조합 $\sum_{j=0}^M a_j^{(M)} N^{2j}$가 $N^{-1}$을 효과적으로 근사하도록 선택된다. 본 논문의 범위 내에서 이러한 계수는 주로 분석적으로 파생되는 테일러 계수이며(4식), $x=1$ 주변의 $x^{-1}$의 테일러 전개에서 파생된다. 따라서 이 작업 내에서 이러한 계수를 반복적으로 업데이트하거나 "학습"하는 것은 없다. 계수는 완화 순서 $M$이 선택되면 고정된다.
-
완화 순서($M$)를 통한 수렴: 완화의 정확도는 완화 순서 $M$이 증가함에 따라 개선된다. 더 높은 $M$은 노이즈 역함수에 대한 더 높은 차수의 다항식 근사를 의미하며, 이는 더 복잡하거나 고차 노이즈 항을 취소할 수 있다. 이는 이상적인 값으로 수렴하는 더 정확한 완화된 기대값으로 이어진다. 그러나 $M$을 증가시키면 더 많은 회로를 실행해야 하므로 샘플링 오버헤드가 증가한다.
-
계층화($L$)를 통한 편향 감소: LKIK의 핵심 혁신은 회로를 $L$개의 계층으로 분해하여 잔여 편향을 크게 줄이는 능력이다. 본 논문은 충분히 얇은 계층의 경우 주요 편향 항, 즉 두 번째 순서 매그너스 항 $\Omega_2$와 관련된 항이 $1/L^2$로 확장됨을 보여준다(34식). 이는 계층 수를 늘리면 방법 자체의 고유 편향이 임의로 작아져 프로토콜을 실질적으로 "편향 없음"으로 만든다는 것을 의미한다. 이는 고차 매그너스 노이즈 항으로 인해 작은 잔여 오류가 발생했던 GKIK의 한계를 직접적으로 해결한다.
-
드리프트 탄력성 메커니즘: 프로토콜은 시간적 노이즈 드리프트에 탄력적이도록 설계되었다. 이는 실험 샷의 총 수를 여러 세트로 나누는 방식으로 달성된다. 각 세트 내에서 모든 $M+1$개의 증폭된 회로(주어진 $M$에 대해)가 실행된다. 이는 실험 중에 발생하는 모든 노이즈 드리프트가 각 세트 내의 모든 회로에 유사한 방식으로 영향을 미치도록 보장한다. 후처리 단계의 선형 조합(합산)은 이 공통 드리프트 유발 편향을 각 세트에서 효과적으로 취소한다. 이러한 여러 세트에 대한 완화된 결과의 평균은 분산을 줄여 안정적인 드리프트 탄력적 결과를 제공한다. 이는 이를 특성화할 필요 없이 시간에 따라 변하는 노이즈를 처리하는 영리한 방법이다.
요약하자면, LKIK 메커니즘은 역함수를 근사하도록 계수가 사전 계산되고, 이 근사의 순서($M$)를 증가시키고, 회로 계층화($L$)를 통해 고유 편향을 줄임으로써 "학습"한다. 방법의 안정성은 반복적인 최적화가 아닌 실행 프로토콜의 구조적 속성인 내재된 드리프트 탄력성으로 더욱 강화된다.
결과, 한계 및 결론
실험 설계 및 기준선
저자들은 주로 수치 시뮬레이션을 통해 계층형 KIK(LKIK) 접근 방식을 엄격하게 검증했으며, 특정 측면에 대한 동반 실험 작업을 참조했다. 주요 비교를 위해 4큐비트 시뮬레이션이 사용되었으며, 이는 그림 1에 나와 있다. 실험은 완화된 기대값과 이상적인 값 사이의 차이 $\Delta(A)$를 완화 순서 $M$에 대해 플로팅하여 측정하도록 설계되었다. 순서 $M=0$은 완화가 없음을 나타냈다. 약한 노이즈 시나리오($\xi = 0.02$)와 더 강한 노이즈 시나리오($\xi = 0.2$)의 두 가지 노이즈 강도 매개변수가 테스트되었다. 이상적인 기대값은 약 0.025로 설정되었다. 이 비교의 "희생자"는 "1 계층(GKIK)"으로 표시된 GKIK와 다양한 계층 수(2, 4, 10, 20 계층)를 가진 LKIK였다. 이 설정은 다양한 노이즈 조건에서 LKIK의 계층 수를 늘리는 것이 완화 성능에 어떻게 영향을 미치는지 직접 비교할 수 있게 했다.
잔여 오류의 확장을 구체적으로 보여주기 위해 그림 3은 그림 1a와 동일한 4큐비트 회로에 대한 수치 실험을 제시했지만, 이번에는 계층 수 $L$의 함수로 고정된 완화 순서(7)에 대한 오류를 플로팅했다. 이는 얇은 계층에 대한 $1/L^2$ 오류 의존성에 대한 이론적 예측을 검증하는 데 중요했다.
또한, 본 논문은 LKIK의 동적 회로와의 호환성을 다루었으며, 이는 주요 이점이다. 그림 4는 중간 회로 측정 및 피드포워드를 포함하는 동적 회로에 대한 LKIK 완화와 비동적 유니터리 진화 회로를 비교하는 수치 시뮬레이션을 보여주었다. 두 시나리오 모두 10개의 계층과 $\xi = 0.1$의 노이즈 매개변수를 사용했다. 이 실험은 LKIK가 GKIK가 이전에 실패했던 중간 회로 측정과의 비호환성으로 인해 복잡한 동적 설정에서도 동등하게 잘 수행됨을 결정적으로 보여주는 것을 목표로 했다.
이 논문은 주로 LKIK에 대한 수치 증거와 분석 파생에 중점을 두지만, "방법" 섹션에서 기본 KIK 원리의 두 가지 실험적 시연을 참조한다. 보충 노트 1은 $R_{xx}(\pi/2)$ 게이트 회로에 인위적으로 시간적 과회전을 유도하여 KIK 방법의 드리프트 탄력성을 입증한 이온 트랩 양자 컴퓨터(IBEX - AQT)에 대한 실험을 설명한다. 보충 노트 2는 IBM 초전도 장치(ibm_jakarta)에 대한 실험을 자세히 설명하며, 이는 LKIK가 해결하고자 하는 문제인 게이트 삽입으로 인해 발생하는 부정확한 노이즈 증폭 문제를 검증했다. 동적 양자 회로에서 오류를 완화하는 LKIK의 효과에 대한 실험적 검증은 동반 논문 [62]에 제시된다고 명시적으로 명시되어 있다.
증거가 증명하는 것
본 논문에서 제시된 수치 증거는 계층형 KIK(LKIK)가 글로벌 KIK(GKIK)에 비해 갖는 이점에 대한 설득력 있는 증거를 제공하며, 이전 양자 오류 완화(QEM) 체계의 몇 가지 치명적인 한계를 해결한다.
첫째, 그림 1의 시뮬레이션은 LKIK가 GKIK보다 $\Delta(A)$ 오류를 줄이는 데 훨씬 뛰어나다는 것을 부인할 수 없이 보여준다. 약한($\xi = 0.02$) 및 강한($\xi = 0.2$) 노이즈 시나리오 모두에서 LKIK의 계층 수를 늘리면 완화된 기대값의 이상값으로부터의 편차가 크게 감소한다. 예를 들어, 그림 1a에서 $\xi = 0.02$일 때 GKIK(1 계층)는 오류가 약 $10^{-3}$에서 평탄화되는 반면, 20 계층의 LKIK는 더 높은 완화 순서에서 $10^{-5}$ 미만의 오류를 달성한다. 이는 계층 기반 노이즈 증폭 메커니즘이 GKIK가 처리할 수 없었던 오류를 효과적으로 억제한다는 결정적인 증거이다. 그림 1의 점선은 LKIK 공식(30식)의 예측을 나타내며 시뮬레이션 결과와 잘 일치하여 기본 수학 모델을 더욱 검증한다.
둘째, 본 논문은 충분한 수의 계층을 가진 LKIK의 편향 없는 특성에 대한 강력한 증거를 제공한다. 그림 3은 완화 순서 7에 대한 오류를 계층 수에 대해 플로팅하며, 오류가 $1/L^2$로 확장됨을 명확하게 보여준다. 빨간색 점(시뮬레이션 결과)이 회색 $1/L^2$ 곡선에 잘 맞는 것은 이론적 예측(34식)을 확인한다. 이 확장은 고차 매그너스 노이즈 항으로 인한 잔여 편향이 빠르게 감소하여 LKIK를 실질적으로 편향 없게 만든다는 것을 증명하는 중요한 수학적 주장이다. 이는 설명되지 않은 고차 매그너스 항으로 인해 작은 잔여 오류가 발생했던 GKIK의 한계를 직접적으로 해결한다.
셋째, LKIK의 동적 회로(중간 회로 측정(MCM) 및 피드포워드 포함)와의 호환성은 중요한 돌파구이다. 그림 4는 LKIK가 동적 회로(파란색 곡선)와 비동적 유니터리 진화 회로(녹색 곡선)에 대해 동등하게 잘 수행됨을 보여준다. 두 경우 모두 완화 순서가 증가함에 따라 오류 $\Delta(A)$가 0에 접근한다. 이는 LKIK가 양자 오류 정정(QEC) 프로토콜에 필수적인 MCM과의 GKIK의 비호환성을 극복한다는 결정적인 증거이다. 이는 LKIK를 복잡한 실제 양자 계산에 대한 실행 가능한 QEM 방법으로 만든다.
마지막으로, 이 논문의 새로운 실험 결과에 직접적으로 표시되지는 않았지만, 텍스트는 LKIK가 보충 노트 1에서 입증된 대로 원래 KIK 프로토콜의 드리프트 탄력성을 상속한다고 강조한다. 이는 방법의 성능이 시간적 노이즈 매개변수 변동에 대해 견고하다는 것을 의미하며, 이는 장시간 실행되는 양자 실험에 중요한 특징이다. 편향 없는 작동, 동적 회로 호환성 및 드리프트 탄력성의 조합으로 인해 LKIK는 NISQ 시대 이후 신뢰할 수 있는 양자 컴퓨팅의 강력하고 다재다능한 QEM 접근 방식이 된다.
한계 및 향후 방향
계층형 KIK(LKIK) 프로토콜은 양자 오류 완화에서 상당한 발전을 제시하지만, 현재의 한계를 인식하고 향후 개발을 위한 방향을 고려하는 것이 중요하다.
즉각적인 한계 중 하나는 이 원고가 "인쇄 중인 기사"이며, 편집되지 않은 버전일 수 있고 오류가 포함될 수 있다는 것이다. 기술적인 관점에서 볼 때 LKIK는 드리프트 탄력적이고 편향 없도록 설계되었지만, 펄스 기반 역함수 프로토콜(KIK 구성 요소)에 대한 의존성은 모든 양자 컴퓨팅 플랫폼 및 게이트 유형에 걸쳐 보편적으로 간단하게 구현되지 않을 수 있다. 특히, 본 논문은 고정 또는 가변 커플러 위상 게이트 [72]에 대한 펄스 역함수 구현이 "덜 간단하다"고 언급한다. 이는 하드웨어 수준의 제어 및 보정이 다양한 플랫폼에 대한 광범위한 적용 가능성에 대한 실질적인 과제로 남아 있음을 시사한다.
또 다른 고려 사항은 샘플링 오버헤드이다. LKIK는 특히 적응형 계수를 사용하면 다른 방법보다 샘플링 비용을 줄일 수 있지만, 여전히 상당한 오버헤드를 발생시킨다. 본 논문은 "드리프트 탄력적인 QEM 프로토콜에 대해 만 건 또는 그 이상의 샘플링 오버헤드가 현실적이다"라고 언급한다. 이는 현실적인 것으로 간주되지만, 특히 회로 복잡성이 증가함에 따라 상당한 리소스 비용을 나타낸다. 다변수 외삽(MVE)과의 비교는 MVE가 더 작은 깊이 오버헤드를 가지고 있음에도 불구하고 GKIK를 사용한 단일 계층 테일러(SLT)보다 "상당히 더 큰 샘플링 오버헤드"를 발생시킨다는 점을 강조하며, 이는 런타임 및 샘플링 효율성을 최적화하는 것이 여전히 중요한 영역임을 시사한다.
또한, LKIK에 대한 $1/L^2$의 이론적 오류 확장은 "충분히 얇고 균일하게 간격을 둔 계층"이라는 가정에 의존한다. 본 논문은 균일성에서 벗어난 편차가 더 거친 $1/L$ 경계에 약간만 영향을 미친다는 것을 보여주지만, 최적의 $1/L^2$ 확장을 실질적으로 달성하려면 신중한 회로 분해 및 펄스 수준 제어가 필요할 수 있다. 동적 회로에 대한 LKIK의 실험적 검증은 동반 논문 [62]에 주로 제시되므로 이 논문 내의 모든 주장에 대한 직접적인 실험적 증거는 자세히 설명되어 있지 않다.
앞으로 나아가면서 몇 가지 흥미로운 논의 주제와 연구 방향이 나타난다.
-
더 깊은 QEC-QEM 통합: LKIK의 중간 회로 측정과의 원활한 호환성은 진정으로 안정적인 하이브리드 QEC-QEM 프로토콜을 위한 길을 열어준다. 향후 연구는 QEC가 지배적인 국소적, 비상관 오류를 처리하고 LKIK가 누설, 상관 및 코히런트 오류와 같이 수정하기 어려운 잔여 오류를 완화하는 통합 시스템을 설계하고 실험적으로 시연하는 데 중점을 둘 수 있다. 이는 내결함성 양자 컴퓨팅의 경계를 크게 확장할 수 있다.
-
계층 분해 및 적응형 계수 최적화: 주어진 양자 회로 및 노이즈 프로파일에 대한 계층 수 및 구조($L$)를 최적으로 결정하는 방법은 무엇인가? 연구는 목표 정확도를 충족하면서 총 오버헤드를 최소화하기 위해 동적으로 $L$을 조정하는 계층 분해를 위한 적응형 알고리즘을 탐색할 수 있다. 더 적은 샷과 회로로 더 강력한 완화를 달성하기 위해 적응형 후처리 기술(이 작업에서 연기됨)의 추가 개발이 필수적이다.
-
하드웨어별 구현 및 펄스 엔지니어링: 다양한 양자 하드웨어 아키텍처(예: 초전도, 이온 트랩, 광자)의 다양한 게이트 세트에 대한 펄스 역함수 연산 구현에 대한 특정 과제 및 솔루션 조사. 이는 얇은 계층에서 누설 노이즈 및 여기를 완화하기 위한 고급 펄스 성형 기술을 포함할 수 있으며, 다양한 플랫폼에서 방법의 실용성을 보장한다.
-
비마르코프 효과 완화: 트윌링 및 의사 트윌링은 KIK를 적용하기 전에 비마르코프 노이즈를 처리할 수 있지만, 비마르코프 동역학 모델을 LKIK 프레임워크 자체에 직접 통합하는 방법을 탐색하면 더욱 강력하고 일반적인 완화 전략으로 이어질 수 있다. 이는 계층화된 회로를 통해 비마르코프 동역학이 어떻게 전파되는지에 대한 더 깊은 이해가 필요할 것이다.
-
다른 QEM 방법과의 시너지: 본 논문은 "대부분"의 노이즈를 처리하기 위해 특성화 기반 방법(PEC, PEA, 기계 학습)과 LKIK를 결합할 것을 제안하며, LKIK가 드리프트 및 해당 노이즈 모델 외부의 오류에 집중할 수 있도록 한다. 향후 연구는 이러한 하이브리드 접근 방식을 체계적으로 탐색하여 샘플링 오버헤드, 드리프트 탄력성 및 전반적인 성능의 절충을 정량화할 수 있다. 예를 들어, LKIK를 텐서 오류 완화(TEM)와 결합하면 LKIK 자체보다 샘플링 오버헤드가 적은 노이즈-드리프트 탄력적 솔루션을 얻을 수 있다.
-
런타임 오버헤드 및 확장성: 다른 고급 QEM 방법(예: MVE)과 비교하여 LKIK의 런타임 오버헤드에 대한 상세한 분석 및 실험적 검증은 실질적인 확장성을 평가하는 데 중요하다. 여러 양자 프로세서에 걸쳐 샷 수집을 병렬화하는 전략을 탐색하면 벽시계 시간을 더욱 줄여 높은 샘플링 오버헤드를 더 관리하기 쉽게 만들 수 있다.
이러한 한계를 해결하고 이러한 향후 방향을 탐색함으로써 LKIK 프레임워크는 NISQ 시대 이후 신뢰할 수 있는 양자 컴퓨팅의 초석이 될 잠재력을 가지고 있다.
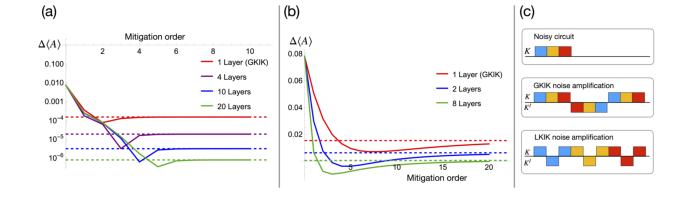 Figure 1. A four-qubit simulation demonstrating the advantage of using the layered-based KIK (LKIK) amplification over the global KIK amplification (GKIK - single layer). In (a) & (b) the y axis is the difference ∆⟨A⟩be- tween the mitigated expectation value (see main text) and the ideal value, and the x axis is the mitigation order M with M = 0 indicating no mitigation. The ideal expectation value is ⟨A⟩≃0.025. In (a) the noise strength parameter is ξ = 0.02 and in (b) it is ξ = 0.2. Fig. (a) shows that LKIK is essential for achiev- ing high accuracy even when the noise is weak, while Fig. (b) shows that LKIK is important when the noise is strong even when the requested target accuracy is modest. The dashed lines show the prediction of the Layered KIK formula (30). (c) An illustration of a three-layer circuit (top) being noise amplified with GKIK (middle) and LKIK (bottom). The amplification factor is three for both cases. Squares below the black horizontal line represent pulse-inverse operation
Figure 1. A four-qubit simulation demonstrating the advantage of using the layered-based KIK (LKIK) amplification over the global KIK amplification (GKIK - single layer). In (a) & (b) the y axis is the difference ∆⟨A⟩be- tween the mitigated expectation value (see main text) and the ideal value, and the x axis is the mitigation order M with M = 0 indicating no mitigation. The ideal expectation value is ⟨A⟩≃0.025. In (a) the noise strength parameter is ξ = 0.02 and in (b) it is ξ = 0.2. Fig. (a) shows that LKIK is essential for achiev- ing high accuracy even when the noise is weak, while Fig. (b) shows that LKIK is important when the noise is strong even when the requested target accuracy is modest. The dashed lines show the prediction of the Layered KIK formula (30). (c) An illustration of a three-layer circuit (top) being noise amplified with GKIK (middle) and LKIK (bottom). The amplification factor is three for both cases. Squares below the black horizontal line represent pulse-inverse operation
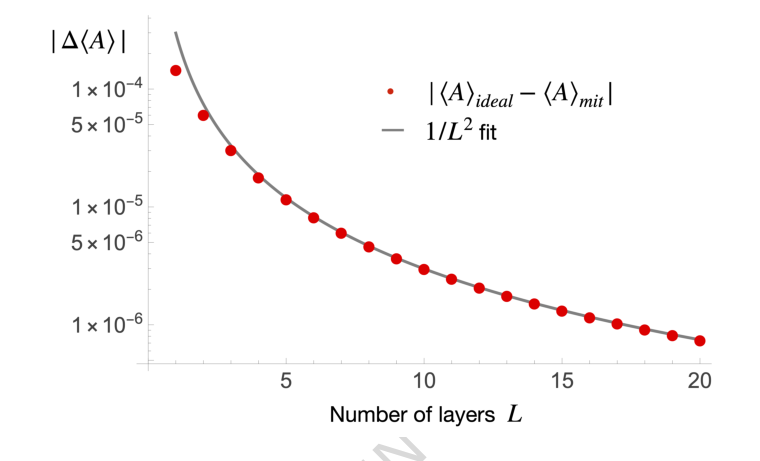 Figure 3. For the same example as in Fig. 1a, the error with respect to the ideal expectation value (red dots) is plotted for order seven as a function of number of layers. The good fit to the 1/L2 curve confirms the prediction of Eq. (34)
Figure 3. For the same example as in Fig. 1a, the error with respect to the ideal expectation value (red dots) is plotted for order seven as a function of number of layers. The good fit to the 1/L2 curve confirms the prediction of Eq. (34)