하이브리드 경계 물리 정보 신경망을 이용한 복잡한 경계에서의 Navier-Stokes 방정식 해법
Physics-informed neural networks (PINN) have achieved notable success in solving partial differential equations (PDE), yet solving the Navier-Stokes equations (NSE) with complex boundary conditions remains a...
배경 및 학문적 계보
이 논문에서 다루는 문제의 정확한 기원을 이해하기 위해서는 유체 역학과 현대 인공지능의 교차점을 살펴볼 필요가 있다. 수십 년 동안 과학자와 공학자들은 점성 유체의 동적 거동, 즉 액체와 기체가 어떻게 움직이는지를 설명하기 위해 Navier-Stokes 방정식(NSE)에 의존해 왔다. 전통적으로 이러한 매우 복잡하고 비선형적인 방정식은 계산 유체 역학(CFD)을 사용하여 해결되었다. 그러나 CFD는 "메쉬 생성"이라는 과정을 필요로 하는데, 이는 물리적 공간을 수많은 작은 모양의 격자로 분할하는 것이다. 복잡하고 불규칙한 형상에 대한 이 메쉬를 생성하는 것은 극도로 어렵고 시간이 많이 소요되며 수치적 불안정성을 야기할 수 있다.
2019년에 획기적인 발전이 이루어졌는데, Physics-Informed Neural Networks(PINNs)가 도입된 것이다. PINNs는 메쉬 없이도 이러한 방정식을 해결하기 위해 딥러닝을 사용한다. 이는 물리 법칙을 신경망의 학습 과정에 직접 내장함으로써 이루어진다. 그러나 연구자들이 실제 유체 문제에 PINNs를 적용하기 시작하면서, 복잡한 경계(불규칙한 장애물 주변의 유체 흐름 등)를 다루는 새롭고 매우 특정한 문제가 등장했다.
이전 PINN 접근 방식의 근본적인 한계, 즉 "pain point"는 연구자들이 "손실 충돌 문제(loss conflict problem)"라고 부르는 것이다. 기존의 PINN에서는 AI에게 유체의 물리 법칙(PDE 손실)과 물리적 경계의 규칙(경계 조건 손실)을 동시에 학습하도록 요청한다. 이 두 가지 목표가 단일 수학적 통(손실 함수)에 담겨 있기 때문에, 신경망은 종종 이를 균형 맞추는 데 어려움을 겪는다. 기하학적 경계가 매우 복잡해지면 신경망은 혼란스러워한다. 유체 역학은 완벽하게 만족시키지만 고체 벽을 존중하지 못하거나 그 반대의 경우가 발생할 수 있다. 해석적 수학을 사용하여 "하드 제약 조건(hard constraints)"을 강제함으로써 이를 수정하려는 이전 시도는 복잡한 접합부 근처에서 왜곡되고 불규칙한 예측을 초래했는데, 이는 해당 수학적 함수가 자연스럽지 않았기 때문이다. 본 논문의 저자들은 이러한 상충되는 목표를 분리하여, 경계와 내부 유체 물리학을 별도로 하지만 협력적으로 처리하는 하이브리드 시스템을 만들기 위해 이 논문을 작성했다.
다음은 이 논문의 몇 가지 매우 전문적인 도메인 용어를 완전한 초보자를 위한 직관적인 비유로 번역한 것이다.
- Navier-Stokes Equations (NSE):
- 비유: 물과 공기 분자를 위한 궁극적이고 깨지지 않는 "교통 법규"라고 생각하면 된다. 교통 법규가 누가 양보해야 하는지, 얼마나 빨리 갈 수 있는지, 충돌 없이 교차로를 어떻게 통과해야 하는지를 규정하는 것처럼, NSE는 유체 분자가 물리 법칙을 위반하지 않고 어떻게 흐르고, 소용돌이치며, 압력 및 마찰과 상호 작용해야 하는지를 정확하게 규정한다.
- Physics-Informed Neural Networks (PINN):
- 비유: 학생에게 사실적인 풍경화를 그리도록 가르치는 것을 상상해 보라. 표준 신경망은 수백만 장의 사진을 암기하고 픽셀 패턴을 복사하려고만 한다. 그러나 PINN은 중력과 빛의 원근법에 대한 실제 법칙도 배운 학생과 같다. 근본적인 규칙을 알고 있기 때문에, 특정 폭포를 본 적이 없더라도 위로 흐르는 폭포를 실수로 그리지 않을 것이다.
- Loss Conflict Problem:
- 비유: 당신이 요리사를 고용하여 두 가지 엄격한 지침을 주고 있다고 상상해 보라: "요리를 매우 맵게 만들어라"와 "어린이를 위해 완전히 순하게 만들어라." 요리사는 두 가지 완전히 모순되는 요구 사항을 동시에 최적화하려고 하다가 마비되어 끔찍한 식사를 만들게 된다. PINN에서 신경망은 내부 유체 물리학과 복잡한 경계 규칙을 정확히 동시에 완벽하게 만족시키려고 노력하다가 유사하게 마비된다.
- Distance Metric Network ($\mathcal{N_D}$):
- 비유: 최신 자동차의 주차 근접 센서라고 생각하면 된다. 후진할 때 벽에 가까워질수록 더 빠르게 삐 소리가 난다. 이 특정 하위 네트워크는 공간 센서 역할을 하여 메인 AI에게 경계까지의 거리가 얼마나 되는지를 정확히 알려주므로, AI는 "벽 규칙" 대 "열린 물 규칙"에 언제 엄격하게 주의를 기울이기 시작해야 하는지를 정확히 알게 된다.
아래는 제안된 HB-PINN 모델의 메커니즘을 이해하는 데 필요한 주요 수학적 표기법, 변수 및 매개변수를 정리한 표이다.
| 표기법 | 유형 | 설명 |
|---|---|---|
| $\mathbf{u}$ | 변수 | 유체의 속도 벡터 (수평 및 수직 성분 $u$ 및 $v$ 포함). |
| $p$ | 변수 | 특정 시공간 지점에서의 유체 압력. |
| $\rho$ | 매개변수 | 유체의 밀도 (비압축성 유동의 경우 일정하게 유지됨). |
| $\nu$ | 매개변수 | 동점성 계수로, 유체의 내부 마찰 또는 "점도"를 나타낸다. |
| $q(\mathbf{x}, t)$ | 변수 | 공간 좌표 $\mathbf{x}$와 시간 $t$에서의 예측 대상 물리량 (예: 속도 또는 압력)에 대한 일반적인 플레이스홀더. |
| $\mathcal{P}_q(\mathbf{x}, t)$ | 함수 | 경계 조건을 엄격하게 만족하도록 훈련된 Particular Solution Network ($\mathcal{N_P}$)의 출력. |
| $\mathcal{D}_q(\mathbf{x}, t)$ | 함수 | Distance Metric Network ($\mathcal{N_D}$)의 출력으로, 점과 가장 가까운 경계까지의 공간 거리를 나타낸다. |
| $\mathcal{H}_q(\mathbf{x}, t)$ | 함수 | Primary Network ($\mathcal{N_H}$)의 출력으로, 내부 유체 역학 (지배 방정식인 PDE)을 해결하는 데만 집중한다. |
| $\mathcal{L}$ | 매개변수 | 신경망이 최소화하려고 하는 오차를 나타내는 손실 함수. $\mathcal{L}_{PDE}$ (방정식 오차) 및 $\mathcal{L}_{BC}$ (경계 오차)와 같은 부분으로 분할된다. |
| $\lambda_i$ | 매개변수 | 훈련 중에 손실 함수의 어느 부분이 더 중요하게 집중해야 하는지를 신경망에 알려주는 데 사용되는 가중치 계수. |
| $\alpha$ | 매개변수 | 거리 함수의 성장률(기울기)을 제어하는 양수로, 신경망이 경계 규칙에서 내부 규칙으로 얼마나 날카롭게 전환되는지를 결정한다. |
문제 정의 및 제약 조건
물결이 거친 바위 주변이나 복잡한 파이프 시스템을 통해 흐르는 물의 흐름을 정확하게 예측한다고 상상해보자. 전통적으로 엔지니어들은 계산 유체 역학(CFD)을 사용하는데, 이는 전체 유체 영역에 걸쳐 미세하고 완벽한 격자를 그려야 하는 메쉬 생성 과정을 필요로 한다. 이 과정은 악명 높게 지루하고 수치적 불안정성에 취약하다.
물리 정보 신경망(PINNs)은 격자를 완전히 건너뛰고 신경망에 물리 법칙을 가르치는 획기적인 지름길을 약속했다. 그러나 실제 복잡한 형상에 적용될 때, 이러한 신경망은 거대한 수학적 장벽에 부딪힌다. 이것이 정확히 왜 발생하는지, 그리고 이 논문이 해결하려는 특정 문제를 자세히 살펴보자.
시작점과 목표 상태
입력 (현재 상태):
우리는 시공간 좌표 $(x, t)$의 집합과 비압축성 Navier-Stokes 방정식(NSE)으로 알려진 유체 역학의 지배 법칙으로 시작한다:
$$ \nabla \cdot \mathbf{u} = 0 $$
$$ \frac{\partial \mathbf{u}}{\partial t} + (\mathbf{u} \cdot \nabla)\mathbf{u} + \frac{1}{\rho}\nabla p - \nu \nabla^2 \mathbf{u} = 0 $$
이 방정식들과 함께, 우리는 분할된 입구 또는 유체 속도가 정확히 0이어야 하는 불규칙한 장애물 구조(미끄러짐 없음 조건)와 같은 매우 복잡한 경계 조건을 가진다.
출력 (목표 상태):
원하는 최종 목표는 주어진 임의의 지점에서 속도 벡터 $\mathbf{u}$ ($u$와 $v$로 구성)와 유체 압력 $p$를 즉각적이고 정확하게 출력할 수 있는 훈련된 신경망이다.
수학적 간극:
누락된 연결 고리는 연속적인 신경망이 내부 유체에서 발생하는 부드럽고 연속적인 물리학을 계산하는 능력을 손상시키지 않으면서 경계에서의 날카롭고 불규칙한 규칙을 엄격하게 준수하도록 강제하는 신뢰할 수 있는 수학적 다리이다.
고통스러운 딜레마
이전 연구자들은 "손실 충돌 문제"로 알려진 잔인한 절충안에 갇혀 있었다. 이를 해결하려고 할 때, 한 측면을 개선하면 다른 측면이 근본적으로 깨진다:
- 소프트 제약 함정: 기존 PINN에서는 물리 오차(PDE 손실)와 경계 오차를 모두 포함하는 단일의 거대한 손실 함수를 최소화하도록 신경망에 지시한다. 그러나 신경망은 압도당한다. 신경망은 둘 다 동시에 최소화하려고 시도하지만, 복잡한 경계는 훈련 중에 물리적 기울기에 적극적으로 저항하는 거친 수학적 기울기를 생성한다. 신경망은 결국 타협하게 되어 전체 유체 시뮬레이션을 오염시키는 부정확한 경계를 초래한다.
- 하드 제약 함정: 이를 해결하기 위해 과학자들은 "하드 제약" PINN(hPINN과 같은)을 시도했다. 그들은 분석적 거리 함수를 사용하여 수학적으로 경계에서 신경망의 출력이 정확히 0이 되도록 강제했다. 여기서 고통스러운 딜레마가 발생한다: 복잡한 형상의 경우, 이러한 정확한 수학적 공식은 매우 부자연스럽다. 신경망을 이러한 엄격한 수학적 고리를 통과하도록 강제하면 내부 유체 예측이 왜곡되고, 불규칙하며, 불연속적이게 된다. 경계는 완벽하게 수정하지만, 내부의 유체 역학은 완전히 깨진다.
가혹한 벽과 제약
이 문제를 해결하기 어렵게 만드는 것은 무엇인가? 저자들은 몇 가지 가혹하고 현실적인 벽에 부딪혔다:
- 기하학적 비실현 가능성: 하드 제약을 작동시키려면, 임의의 지점에서 경계까지의 정확한 거리를 계산하는 거리 함수 $D_q(x, t)$가 필요하다. 단순한 평평한 벽의 경우, 이는 기본적인 대수 방정식이다. 복잡하거나, 분할되거나, 불규칙한 경계의 경우, 정확한 해석적 표현을 도출하는 것은 수학적으로 불가능하다.
- 극심한 기울기 병리학: 표준 신경망이 경계에 주의를 기울이도록 강제하기 위해, 연구자들은 경계 손실 가중치를 인위적으로 부풀려야 한다(예: 경계 가중치 $\lambda_2 = 1000$으로 설정하고 물리 가중치 $\lambda_1 = 1$로 설정). 이는 엄청난 불균형을 야기한다. 신경망은 가장자리를 암기하는 데 과도하게 집중하고 실제 지배적인 유체 방정식을 완전히 무시한다.
- 고도로 비선형적인 물리학: Navier-Stokes 방정식은 비선형 대류 가속 항 $(\mathbf{u} \cdot \nabla)\mathbf{u}$로 인해 악명 높게 용서받지 못한다. 이 비선형성 때문에, 복잡한 경계에서의 미세한 오차조차도 빠르게 증폭되어 전체 유동장 예측을 불안정하게 만든다.
- 신경망 용량 한계: 단일 신경망 아키텍처에 복잡한 경계에서 요구되는 날카롭고 고주파수의 전환과 내부 유체의 부드럽고 저주파수의 물리적 역학을 동시에 학습하도록 요청하는 것은 단순히 표준 최적화 능력을 초과한다. 신경망의 가중치는 두 가지 동작을 동시에 쉽게 표현할 수 없다.
 Figure 40. Comparison of temperature results at t = 0.25, 0.5, 0.75, and 1.0 for the heat conduction problem: (a) sPINN predictions; (b) HB-PINN predictions; (c) ground truth (GT)
Figure 40. Comparison of temperature results at t = 0.25, 0.5, 0.75, and 1.0 for the heat conduction problem: (a) sPINN predictions; (b) HB-PINN predictions; (c) ground truth (GT)
이 접근 방식은 왜
저자들이 Hybrid Boundary Physics-Informed Neural Network (HB-PINN)을 구축한 이유를 진정으로 이해하기 위해서는, 먼저 그들의 입장에서 문제의 근본적인 성격을 살펴볼 필요가 있다. 그들이 해결하고자 했던 문제는 Navier-Stokes equations (NSE)를 이용한 유체 역학 모델링이었다.
저자들이 GAN, Transformer, 또는 Diffusion model과 같은 인기 있고 트렌디한 모델을 사용하지 않은 이유가 궁금하다면, 그 답은 물리학의 엄격한 제약 조건에 있다. 우리는 그럴듯하게 보이는 물의 이미지를 생성하거나 시퀀스의 다음 단어를 예측하려는 것이 아니다. 우리는 고도로 비선형적인 편미분 방정식(PDE)을 결정론적으로 풀어야 한다. 생성 모델은 노이즈를 데이터 분포로 매핑하는데, 이는 질량 및 운동량과 같은 물리적 보존 법칙에 대한 엄격하고 수학적인 준수가 필요한 경우 실질적으로 쓸모가 없다.
전통적인 딥러닝이 여기서 실패하기 때문에, 과학계는 Physics-Informed Neural Networks (PINNs)에 의존한다. PINNs는 실제 물리 방정식을 신경망의 손실 함수에 내장시킨다. 그러나 저자들은 심각한 난관에 봉착했다. 바로 현재의 "SOTA" PINNs가 실제 응용에 근본적으로 결함이 있다는 것을 깨달은 순간이었다.
이 문제는 유체가 복잡한 장애물(예: 막힌 공동 또는 분할된 입구) 주위를 흐를 때 발생한다. 기존의 PINNs(종종 soft-constrained PINNs, 또는 sPINNs라고 불림)는 지배적인 물리 방정식과 경계 조건을 동시에 학습하려고 시도하는데, 이를 단일의 거대한 손실 함수에 욱여넣는다. 이는 심각한 "손실 충돌(loss conflict)"을 야기한다. 경계 조건에서의 기울기(gradients)와 내부 물리에서의 기울기가 backpropagation 중에 문자 그대로 서로 싸운다. 신경망은 혼란스러워지고 정확도는 급락한다.
이를 해결하기 위한 이전의 시도는 hard-constrained PINNs (hPINNs)를 포함했는데, 이는 정확하고 해석적인 수학 공식을 사용하여 신경망이 경계를 존중하도록 강제한다. 그러나 저자들이 논문의 부록 D에서 명시적으로 보여주듯이, 복잡하고 불규칙한 기하학적 구조를 가질 때 이러한 해석적 함수는 실패한다. 그것들은 부자연스러워지고 유체 영역 내에서 매우 왜곡되고 불연속적이며 불규칙한 출력을 유발한다.
이 딜레마에 직면하여 — soft constraint는 기울기 충돌을 야기하고, hard constraint는 복잡한 모양에서 수학적으로 실패한다 — 저자들은 분리되고 복합적인 아키텍처가 유일하게 실행 가능한 해결책이라는 것을 깨달았다.
그들은 세 가지 별개의 하위 신경망을 사용하여 문제를 분할하고 정복하도록 HB-PINN을 설계했다:
1. $\mathcal{N_P}$ (Particular Solution Network): 경계 조건만을 만족하도록 학습된 신경망.
2. $\mathcal{N_D}$ (Distance Metric Network): 임의의 점에서 경계까지의 공간 거리를 학습하는 신경망.
3. $\mathcal{N_H}$ (Primary Network): 내부의 지배적인 PDE를 해결하는 데 전적으로 전념하는 주 신경망.
그들은 임의의 물리량 $q$(속도 또는 압력과 같은)에 대해 다음과 같은 훌륭한 복합 공식을 사용하여 이 신경망들을 결합했다:
$$N_q(\mathbf{x}, t) = \mathcal{N}_{\mathcal{P}_q}(\mathbf{x}, t) + \mathcal{N}_{\mathcal{D}_q}(\mathbf{x}, t) \cdot \mathcal{N}_{\mathcal{H}_u}(\mathbf{x}, t)$$
이 특정 수학 모델이 이전의 gold standard보다 질적으로 우수한 이유는 다음과 같다. $\mathcal{N_P}$와 $\mathcal{N_D}$를 사전 학습하고 그 가중치를 고정함으로써, 거리 함수 $\mathcal{N_D}$는 공간 게이트키퍼 역할을 한다. 정확한 경계에서 $\mathcal{N_D}$는 0이 되는데, 이는 주 신경망 $\mathcal{N_H}$가 완전히 0으로 처리되고 출력이 경계 신경망 $\mathcal{N_P}$에 100% 의존함을 의미한다. 경계에서 멀어져 유체 내부로 이동함에 따라, $\mathcal{N_D}$는 부드럽게 1로 전환되어 주 신경망 $\mathcal{N_H}$가 인계받아 물리학을 해결하도록 한다.
이 전환이 완벽하게 부드럽고 신경망을 불안정하게 만들지 않도록 하기 위해, 그들은 거리 측정치를 개선하기 위해 power-law 함수를 도입했다:
$$f(\hat{\mathcal{D}}_q) = 1 - (1 - \hat{\mathcal{D}}_q / \max(\hat{\mathcal{D}}_q))^\alpha$$
매개변수 $\alpha$를 조정함으로써, 그들은 신경망이 경계에서 내부로 전환되는 정도를 정확하게 제어할 수 있다.
이 논문은 명시적으로 $O(N^2)$에서 $O(N)$으로의 메모리 복잡도 감소를 주장하지는 않지만(솔직히 말해서 여기서 계산 병목 현상은 메모리 확장뿐만 아니라 최적화이다), 압도적으로 우수하게 만드는 구조적 이점을 보여준다: 기울기 병리 현상의 완전한 제거. 주 신경망 $\mathcal{N_H}$는 더 이상 경계를 만족시키는 것에 대해 걱정할 필요가 없기 때문에, PDE 잔차를 최소화하는 데만 집중할 수 있다. 이러한 구조적 분리는 XPINN, SA-PINN, PirateNet과 같은 SOTA 모델에 비해 평균 제곱 오차(MSE)에서 magnitude 감소를 가져온다.
이 접근 방식은 문제의 가혹한 요구 사항과 해결책의 고유한 속성 사이의 완벽한 "결합"을 나타낸다. 문제는 불가능한 해석적 수학에 의존하지 않고 엄격한 경계 강제를 요구했다. 해결책은 신경망($\mathcal{N_D}$)을 사용하여 기하학을 근사화함으로써 이를 제공했으며, 기하학적으로 불가능한 hard constraint를 매우 유연하고 학습 가능한 constraint로 효과적으로 전환했다.
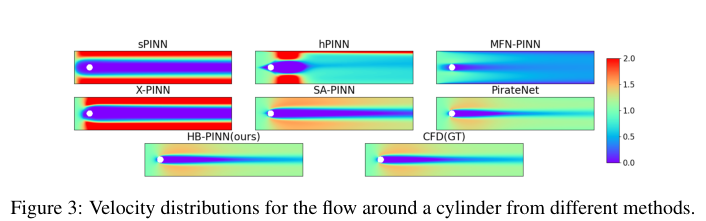 Figure 3. Velocity distributions for the flow around a cylinder from different methods
Figure 3. Velocity distributions for the flow around a cylinder from different methods
수학적 및 논리적 메커니즘
이 논문에서 제시된 혁신을 이해하기 위해서는 먼저 유체 시뮬레이션의 근본적인 문제부터 살펴볼 필요가 있다. 수십 년간 엔지니어들은 공기가 날개 위를 흐르는 방식이나 물이 파이프를 통과하는 방식을 이해하기 위해 전산 유체 역학(CFD)에 의존해 왔다. 이러한 전통적인 방법은 공간을 수백만 개의 미세한 기하학적 격자로 분할하는 "메싱(meshing)"을 요구한다. 메싱은 계산 비용이 많이 들고, 번거로우며, 경계(장애물의 형상과 같은)가 매우 복잡해질 때 불안정성을 야기하기 쉽다.
최근, 물리학 정보 신경망(PINNs)이 혁신적인 대안으로 등장했다. 메싱을 사용하는 대신, PINNs는 딥러닝을 사용하여 해를 추측하고, 그 추측이 물리학 법칙(구체적으로는 Navier-Stokes 방정식)을 위반할 경우 신경망에 페널티를 부과한다. 그러나 표준 PINNs는 "손실 충돌(loss conflict)"이라는 거대한 장애물에 부딪힌다. 유체가 복잡한 경계에 부딪힐 때, 신경망은 혼란스러워한다. 신경망은 복잡한 경계 조건(벽)과 유체 역학(내부)을 동시에 만족시키려고 시도한다. 이 두 가지 목표를 두고 싸우는 수학적 기울기(gradient)는 서로 상쇄되어 매우 부정확한 시뮬레이션으로 이어진다.
이 논문의 저자들은 하이브리드 경계 PINN(HB-PINN)을 개발하여 이 문제를 해결했다. 모든 것을 학습하도록 하나의 네트워크에 강요하는 대신, 경계 제약 조건과 내부 물리학을 엄격하게 분리하는 복합 아키텍처를 구축했다.
이 전체 프레임워크를 구동하는 핵심 방정식은 다음과 같다.
$$ \mathcal{N}_q(\mathbf{x}, t) = \mathcal{N}_{\mathcal{P}_q}(\mathbf{x}, t) + \mathcal{N}_{\mathcal{D}_q}(\mathbf{x}, t) \cdot \mathcal{N}_{\mathcal{H}_q}(\mathbf{x}, t) $$
이 방정식이 데이터를 어떻게 조작하는지 정확히 이해하기 위해 각 부분을 자세히 살펴보자.
- $\mathcal{N}_q(\mathbf{x}, t)$:
- 수학적 정의: 주어진 공간 좌표 $\mathbf{x}$와 시간 $t$에서 특정 물리량 $q$(속도 $u$, 속도 $v$, 또는 압력 $p$일 수 있음)에 대한 최종 복합 출력 함수.
- 물리적/논리적 역할: 이것이 최종 결과물이다. 공간과 시간의 임의의 주어진 지점에서 유체의 정확한 상태를 나타낸다.
- $\mathcal{N}_{\mathcal{P}_q}(\mathbf{x}, t)$:
- 수학적 정의: 특수해 네트워크(Particular Solution Network)의 출력.
- 물리적/논리적 역할: 이것은 "경계 강제자(boundary enforcer)" 역할을 한다. 이것은 경계 조건을 완벽하게 기억하고 만족시키는 유일한 임무를 가진 사전 훈련된 신경망이다(예: 고체 벽에서 속도가 정확히 0이 되도록 보장).
- $+$ (덧셈 연산자):
- 곱셈 대신 덧셈을 사용하는 이유: 덧셈은 중첩의 원리(principle of superposition)를 허용한다. 네트워크는 $\mathcal{N}_{\mathcal{P}_q}$를 기초적인 기준선으로 사용한다. 만약 저자들이 여기서 곱셈을 사용했다면, 경계 네트워크의 0 값은 블랙홀처럼 작용하여 내부에서 계산된 모든 물리학을 완전히 소멸시켰을 것이다. 덧셈은 모델이 "이 경계 기준선으로 시작하고, 그 위에 내부 유체 역학을 더하라"고 말할 수 있게 한다.
- $\mathcal{N}_{\mathcal{D}_q}(\mathbf{x}, t)$:
- 수학적 정의: 거듭제곱 법칙 함수(power-law function)에 의해 형성된 거리 측정 네트워크(Distance Metric Network)의 출력.
- 물리적/논리적 역할: 이것은 공간 마스크 또는 "볼륨 조절기(volume knob)"이다. 경계에서는 정확히 0의 값을 출력하고, 유체의 내부로 이동함에 따라 빠르게 1까지 증가한다.
- $\cdot$ (곱셈 연산자):
- 덧셈 대신 곱셈을 사용하는 이유: 이것은 공간 곱셈기 또는 게이팅 메커니즘(gating mechanism) 역할을 한다. 거리 측정치를 기본 물리학 네트워크에 곱함으로써, 방정식은 경계에서 물리학 네트워크에 0을 곱하도록 강제한다. 이것은 벽에서 내부 물리학 엔진을 완전히 음소거하여, 경계 강제자($\mathcal{N}_{\mathcal{P}_q}$)가 가장자리에서 100% 절대적인 권한을 갖도록 보장한다.
- $\mathcal{N}_{\mathcal{H}_q}(\mathbf{x}, t)$:
- 수학적 정의: 기본 네트워크(Primary Network)의 출력.
- 물리적/논리적 역할: 이것은 핵심적인 물리학 엔진이다. 이것은 도메인 내부에서 Navier-Stokes 방정식을 해결하는 데 전적으로 전념하는 대규모 신경망이다.
단계별 흐름
공간과 시간의 좌표인 $(\mathbf{x}, t)$라는 단일 추상 데이터 포인트가 이 수학적 조립 라인에 들어간다고 상상해보자.
먼저, 좌표는 복제되어 동시에 세 개의 별도 신경망으로 공급된다. 첫 번째 경로에서는 특수해 네트워크가 해당 포인트를 평가하고 가장 가까운 벽을 완벽하게 존중하는 기준 물리 값을 출력한다. 두 번째 경로에서는 거리 측정 네트워크가 해당 포인트가 경계로부터 얼마나 떨어져 있는지 측정하여 백분율을 출력한다(예: 벽에 있으면 0.0, 유체 깊숙이 있으면 0.99). 세 번째 경로에서는 기본 네트워크가 해당 포인트에 대한 복잡한 유체 역학을 계산한다.
다음으로, 조립 라인이 합쳐진다. 기본 네트워크의 원시 물리학 계산은 거리 백분율과 곱해진다. 포인트가 벽에 있다면, 물리학 계산은 0과 곱해져서 버려진다. 포인트가 열린 유체 안에 있다면, 거의 완전히 그대로 유지된다. 마지막으로, 이 스케일링된 물리학 계산은 기준 경계 값에 더해진다. 결과는 네트워크가 서로 싸우지 않고 복잡한 형상을 완벽하게 존중하는, 매끄럽고 물리적으로 정확한 예측이다.
최적화 역학
이 메커니즘이 실제로 어떻게 학습하는지 이해하려면 손실 함수의 형태를 살펴봐야 한다. 표준 PINN에서 손실 함수는 경계 오류와 물리학 오류의 복잡한 조합이다. 기울기(네트워크를 올바른 답으로 향하게 하는 수학적 화살표)는 끊임없이 충돌한다.
HB-PINN은 단계적 최적화 역학을 통해 이를 해결한다. 먼저, 경계 네트워크($\mathcal{N}_{\mathcal{P}}$)와 거리 네트워크($\mathcal{N}_{\mathcal{D}}$)가 사전 훈련된 후 고정된다. 이들의 가중치는 고정된다.
경계가 이미 완벽하게 처리되고 고정되었기 때문에, 기본 네트워크($\mathcal{N}_{\mathcal{H}}$)는 물리학 손실만을 사용하여 최적화된다.
$$ \mathcal{L}_{\mathcal{H}} = \frac{1}{N_{\text{PDE}}} \sum_{i=1}^{N_{\text{PDE}}} \left( \| \nabla \cdot \mathbf{\hat{u}} \|^2 + \left\| \frac{\partial \mathbf{\hat{u}}}{\partial t} + (\mathbf{\hat{u}} \cdot \nabla)\mathbf{\hat{u}} + \frac{1}{\rho}\nabla \hat{p} - \nu\nabla^2\mathbf{\hat{u}} \right\|^2 \right) $$
여기서 저자들은 연속적인 공간 적분 대신 $N_{\text{PDE}}$개의 이산 콜로케이션 포인트(collocation points)에 대한 합계($\sum$)를 사용한다. 왜냐하면 신경망은 이산적인 데이터 배치(batch)를 통해 학습하기 때문이다. 컴퓨터 메모리에서 무한한 수의 포인트에 대한 진정한 연속 적분을 계산할 수 없으므로, 수천 개의 이산 포인트를 샘플링하고 그 오류를 합산하여 적분을 근사한다.
노름($\| ... \|^2$) 안의 항들은 비압축성 Navier-Stokes 방정식(질량 보존 및 운동량 보존)의 정확한 잔차(residual)이다. 경계 제약 조건이 고정된 하위 네트워크에 의해 수학적으로 보장되기 때문에, $\mathcal{L}_{\mathcal{H}}$에 대한 손실 함수는 극적으로 평활화된다. 기울기는 더 이상 병적인 충돌을 겪지 않는다. 그들은 물리학 잔차를 최소화하는 방향으로 엄격하게 하향한다. 네트워크는 더 빠르게 수렴하고, 기하학적 복잡성으로 인한 지역 최솟값(local minima)을 피하며, 물리학 엔진이 학습 용량의 100%를 유체 역학에 집중하도록 함으로써 SOTA(State-Of-The-Art) 정확도를 달성한다.
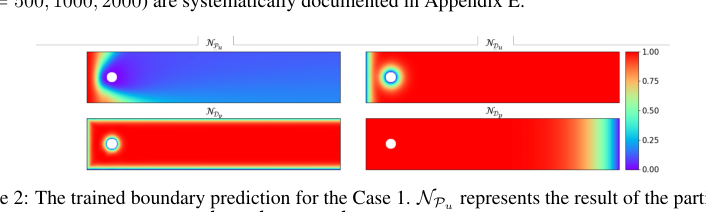 Figure 2. The trained boundary prediction for the Case 1. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
Figure 2. The trained boundary prediction for the Case 1. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
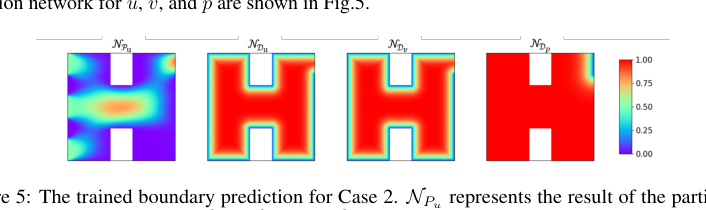 Figure 5. The trained boundary prediction for Case 2. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
Figure 5. The trained boundary prediction for Case 2. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
결과, 한계점 및 결론
배경: 강의 규칙과 이를 학습하는 AI
이 논문을 이해하기 위해서는 먼저 두 가지 개념, 즉 Navier-Stokes 방정식(NSE)과 물리 정보 신경망(PINNs)을 이해해야 한다.
강에서 바위 주변의 물 흐름을 정확하게 예측한다고 상상해보자. 물리학에서는 액체와 기체의 기본적인 운동 법칙인 Navier-Stokes 방정식을 사용한다. 이 방정식은 압력, 속도, 점도가 어떻게 상호작용하는지 계산한다. 그러나 이 방정식은 풀기 매우 어렵다. 전통적으로 엔지니어들은 계산 유체 역학(CFD)을 사용하는데, 이는 강을 수백만 개의 작은 디지털 격자(메시 생성)로 나누고 각 격자에 대해 수학적 계산을 수행하는 것을 포함한다. 이는 정확도가 매우 높지만, 엄청나게 느리고 계산 비용이 많이 든다.
여기서 PINNs가 등장한다. 공간을 격자로 나누는 대신, 우리는 인공지능(신경망)에게 물의 흐름을 추측하도록 요청한다. 하지만 단순히 무작위로 추측하게 하는 것이 아니라, Navier-Stokes 방정식을 AI의 "손실 함수"(페널티 시스템)에 직접 내장한다. AI가 물리 법칙을 위반하는 흐름을 추측하면 페널티를 받는다. 시간이 지남에 따라 AI는 복잡한 격자 없이 물리적으로 정확한 유체 역학을 예측하는 방법을 학습한다.
하지만 한 가지 문제가 있다: 경계 조건(BCs). 강의 규칙은 경계에서 변한다. 예를 들어, 바위 표면에 닿는 물은 속도가 정확히 0이다(이를 미끄러짐 없음 조건이라고 한다).
동기 및 제약: "손실 충돌"
이 논문이 다루는 핵심 문제는 표준 PINNs가 멀티태스킹에 매우 취약하다는 것이다.
표준 PINN이 유체 문제를 해결하려고 할 때, 두 가지 페널티를 동시에 최소화해야 한다:
1. PDE 손실: "강의 중간에서 흐르는 물의 물리 법칙을 따르고 있는가?"
2. BC 손실: "바위 표면에서 움직임을 멈추는 규칙을 따르고 있는가?"
경계가 직선 파이프와 같이 단순할 때, AI는 이를 잘 처리한다. 그러나 경계가 여러 개의 들쭉날쭉한 바위나 분할된 입구와 같이 복잡할 때, AI는 손실 충돌로 고통받는다. 경계 규칙과 내부 물리학에 대한 기울기(AI가 개선 방법을 알려주는 수학적 힌트)가 서로 충돌하기 시작한다. AI는 혼란스러워하고 타협하며, 결국 둘 다 실패하게 된다.
저자들이 극복해야 했던 제약은 AI가 내부 영역에서 물리학을 학습하는 것을 방해하지 않으면서 경계 규칙을 엄격하게 시행할 수 있는 방법을 찾는 것이었으며, 동시에 신경망이 실제로 처리할 수 있도록 수학을 부드럽고 미분 가능하게 유지하는 것이었다.
수학적 해석: 무엇을 어떻게 해결했는가
저자들은 문제를 완전히 분리함으로써 이를 해결했다. 하나의 AI에게 모든 것을 하도록 강요하는 대신, 세 개의 전문화된 하위 신경망을 사용하는 하이브리드 경계 PINN(HB-PINN)을 만들었다.
수학적으로, 그들은 이 아름다운 복합 방정식을 사용하여 임의의 물리량 $q(x, t)$(속도 또는 압력과 같은)의 예측을 재정의했다:
$$q(x, t) = \mathcal{N}_{P_q}(x, t) + \mathcal{N}_{D_q}(x, t) \cdot \mathcal{N}_{H_q}(x, t)$$
이것이 정확히 무엇을 의미하는지 자세히 살펴보자:
- $\mathcal{N}_{P_q}$ (특수해 신경망): 이 신경망은 한 가지 주요 작업을 위해 사전 훈련된다: 경계 조건을 만족시키는 것이다. 이는 벽 바로 근처에서 유체가 어떻게 움직여야 하는지를 학습한다.
- $\mathcal{N}_{D_q}$ (거리 측정 신경망): 이것이 핵심이다. 이 신경망은 한 지점이 경계에서 얼마나 떨어져 있는지 계산한다. 경계에서는 정확히 0을 출력하고, 열린 유체로 이동함에 따라 빠르게 1로 증가한다. 이 전환을 제어하기 위해 특정 거듭제곱 법칙 함수를 사용했다:
$$f(\hat{D}_q) = 1 - (1 - \hat{D}_q / \max(\hat{D}_q))^\alpha$$ - $\mathcal{N}_{H_q}$ (주 신경망): 이 신경망은 유체 내부의 Navier-Stokes 방정식에만 집중한다.
주요 방정식을 다시 보자. 경계에서 거리 측정 신경망 $\mathcal{N}_{D_q}$는 0을 출력한다. 이는 $0 \cdot \mathcal{N}_{H_q}$가 0이 된다는 것을 의미하며, 내부 신경망은 완전히 침묵한다. 최종 결과는 경계 규칙을 완벽하게 만족하는 $\mathcal{N}_{P_q}$일 뿐이다! 벽에서 멀어짐에 따라 $\mathcal{N}_{D_q}$는 1이 되어 주 신경망 $\mathcal{N}_{H_q}$가 인계받아 물리학을 해결할 수 있게 된다. 손실 충돌은 수학적으로 소멸된다.
실험 아키텍처 및 "희생자"
저자들은 승리를 주장하기 위해 단순히 몇 개의 숫자를 표에 제시하지 않았다. 그들은 무자비한 테스트 환경을 설계했다. 그들은 세 가지 유체 역학 시나리오를 설정했으며, 최종적으로는 정상 및 과도(시간 변화) 조건 하에서 매우 복잡한 "장애물이 있는 사각형 공동이 있는 분할 입구"(본질적으로 여러 개의 막힌 입구와 내부 벽이 있는 상자)를 다루었다.
이 실험의 "희생자"는 최첨단 물리 AI의 유명 인사들이었다:
* sPINN (표준 기준선)
* hPINN (경계 고정을 위한 이전 시도인 강제 경계 PINN)
* MFN-PINN (수정된 푸리에 신경망)
* XPINN & SA-PINN (고급 영역 분해 및 자체 적응 모델)
* PirateNet (매우 최근의 매우 강력한 아키텍처)
결정적인 증거:
HB-PINN의 우월성에 대한 부인할 수 없는 증거는 평균 제곱 오차(MSE) 표뿐만 아니라, 오차를 한 자릿수 이상 줄인 것은 인상적이었다. 결정적인 증거는 시각적 잔차 맵이었다.
저자들은 절대적인 Ground Truth로 고충실도 계산 유체 역학(CFD)을 사용했다. 오차(잔차)의 히트맵을 볼 때, 희생자 모델들은 내부 장애물의 모서리와 복잡한 입구 주변에 집중된 거대하고 눈에 띄는 빨간색 영역(높은 오차)을 보여주었다. 기준선은 이상한 경계 근처의 물리학을 전혀 파악하지 못했다. 이와 대조적으로, HB-PINN의 잔차 맵은 전체 영역에 걸쳐 거의 완전히 깊은 파란색(제로에 가까운 오차)이었다.
더욱이, 그들은 레이놀즈 수를 2000으로 높여(유체를 매우 혼란스럽게 만듦) 난이도를 높였다. 기준선 모델의 오차가 급증하는 동안, HB-PINN은 구조적 무결성과 정확성을 유지하여 분리 메커니즘이 극한의 현실에서 작동함을 입증했다.
향후 논의 주제
이 훌륭한 논문을 바탕으로, 향후 연구 및 비판적 사고를 위한 몇 가지 다양한 관점과 주제는 다음과 같다:
1. $\alpha$ 매개변수의 자동화
거리 측정 신경망에서 벽에서 내부로의 전환의 가파른 정도는 $\alpha$라는 매개변수에 의해 제어된다. 저자들은 현재 이 값을 경험적으로 결정한다고 언급했다(시행착오를 통해 Case 2에 $\alpha=5$가 잘 작동한다는 것을 발견함). $\alpha$를 학습 가능한 매개변수로 만들면 이 프레임워크를 발전시킬 수 있을까? 네트워크가 국부적인 유체 난류에 따라 경계층의 가파른 정도를 동적으로 조정할 수 있다면, 모델을 완전히 자체 튜닝할 수 있을 것이다.
2. 3D 및 이동 경계로의 확장
여기서의 실험은 엄격하게 2차원이며 정적 장애물을 사용한다. 실제 엔지니어링(예: 드론의 프로펠러 또는 뛰는 인간의 심장)에서는 경계가 3차원이며 끊임없이 움직인다. 솔직히 말해서, 저자들이 2D에서 경험적 시간에 주로 초점을 맞추고 있기 때문에, 매우 복잡한 3D 기하학으로 이동할 때 거리 측정 샘플링의 계산 오버헤드가 이론적으로 어떻게 확장되는지 완전히 확신할 수 없다. 이동 경계를 가진 4D 시공간 연속체에서 $\mathcal{N}_D$를 효율적으로 계산하는 방법에 대한 논의는 중요한 다음 단계이다.
3. 사전 훈련 대 종단 간 학습의 비용
HB-PINN은 주 신경망($\mathcal{N}_H$)을 훈련하기 전에 특수해 신경망($\mathcal{N}_P$)과 거리 신경망($\mathcal{N}_D$)을 사전 훈련해야 한다. 이것이 손실 충돌을 해결하지만, 다단계 파이프라인을 도입한다. 더 간단한 시나리오에서 세 개의 별도 신경망을 훈련하는 계산 비용이 정당화되는가? 이러한 세 개의 신경망을 순차적인 사전 훈련 없이 동일한 수학적 분리를 달성하는 새로운 게이팅 메커니즘을 가진 단일 아키텍처로 통합할 수 있는지 탐구하는 것은 가치 있는 논의가 될 것이다.
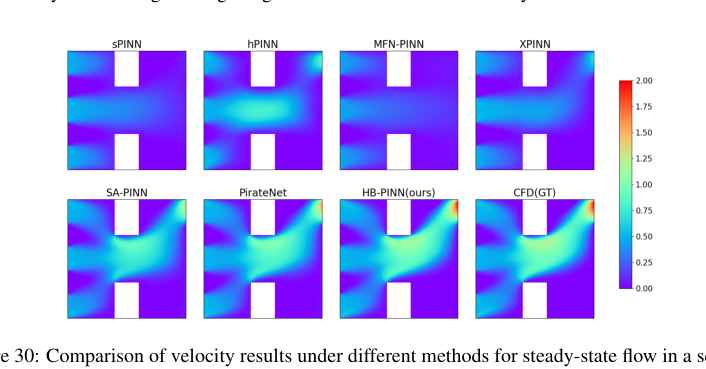 Figure 30. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 500
Figure 30. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 500
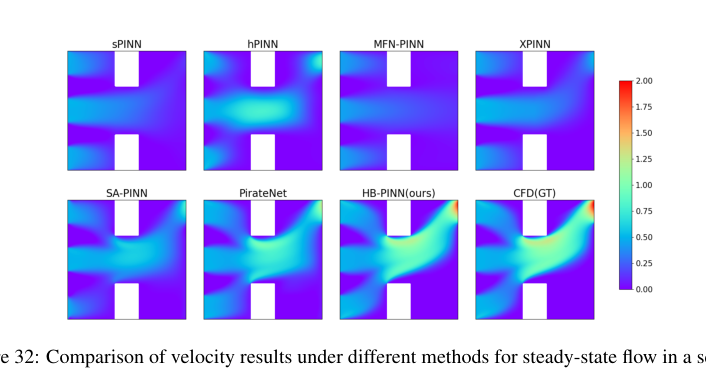 Figure 32. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 1000
Figure 32. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 1000
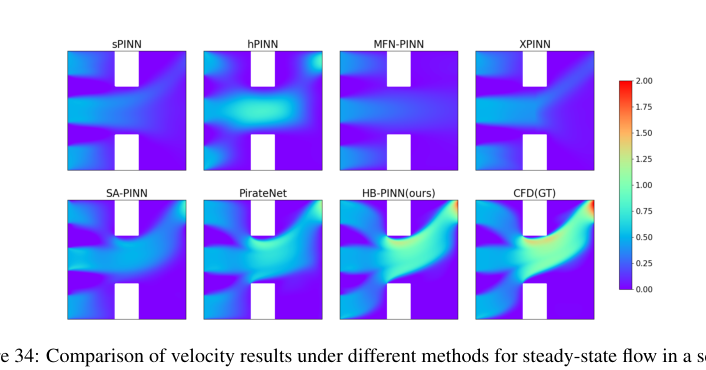 Figure 34. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 2000
Figure 34. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 2000