混合边界物理信息神经网络求解复杂边界的Navier-Stokes方程
Physics-informed neural networks (PINN) have achieved notable success in solving partial differential equations (PDE), yet solving the Navier-Stokes equations (NSE) with complex boundary conditions remains a...
背景与学术渊源
为了理解本文所解决问题的精确起源,我们需要审视流体力学与现代人工智能的交叉点。数十年来,科学家和工程师一直依赖 Navier-Stokes 方程 (NSE) 来描述粘性流体的动力学行为——本质上是液体和气体的运动方式。传统上,这些高度复杂、非线性的方程通过计算流体动力学 (CFD) 来求解。然而,CFD 需要一个称为“网格生成”的过程,即将物理空间划分为海量的微小形状网格。对于复杂、不规则的形状,创建这样的网格极其困难、耗时,并且可能导致数值不稳定。
2019 年,一项突破发生:物理信息神经网络 (PINNs) 被引入。PINNs 利用深度学习来求解这些方程,而无需任何网格。它们通过将物理定律直接嵌入神经网络的学习过程来实现这一点。然而,当研究人员开始将 PINNs 应用于实际流体问题时,出现了一个新的、高度特定的问题:处理复杂边界(如流体绕过不规则障碍物流动)。
先前 PINN 方法的基本限制——或“痛点”——是研究人员称之为“损失冲突问题”。在传统的 PINN 中,AI 被要求同时学习流体的物理规则(PDE 损失)和物理边界的规则(边界条件损失)。由于这两个目标都被放入一个单一的数学桶(损失函数)中,网络常常难以平衡它们。当几何边界变得高度复杂时,网络就会感到困惑。它可能完美地满足流体动力学,但未能遵守固体壁面,反之亦然。先前通过解析数学强制“硬约束”来解决此问题的尝试,导致在复杂连接处出现扭曲、不稳定的预测,因为那些数学函数不自然。作者撰写本文旨在解耦这些冲突的目标,创建一个混合系统,该系统独立但协同地处理边界和内部流体物理。
以下是论文中几个高度专业化的领域术语,用直观的类比来解释,以便初学者理解:
- Navier-Stokes 方程 (NSE):
- 类比: 将这些方程想象成水和空气分子最终的、不可违背的“交通规则”。正如交通规则规定了谁应该让行、可以开多快以及如何在不发生碰撞的情况下通过交叉路口一样,NSE 精确地规定了流体分子必须如何流动、旋转以及与压力和摩擦相互作用,同时不违反物理定律。
- 物理信息神经网络 (PINN):
- 类比: 想象一下教一个学生画一幅逼真的风景画。一个标准的神经网络只是记忆数百万张照片并尝试复制像素模式。然而,一个 PINN 是一个学生,他还学习了重力和光线透视的实际法则。因为他们知道潜在的规则,所以即使他们以前从未见过特定的瀑布,他们也不会意外地画出向上流动的瀑布。
- 损失冲突问题:
- 类比: 想象一下你正在雇佣一位厨师,并给他两个严格的指示:“让这道菜非常辣”和“确保它对孩子来说完全温和”。厨师会因为试图同时优化两个完全矛盾的要求而瘫痪,最终导致一顿糟糕的饭菜。在 PINNs 中,网络在试图同时完美满足内部流体物理和复杂边界规则时,会陷入类似的瘫痪状态。
- 距离度量网络 ($\mathcal{N_D}$):
- 类比: 将其视为现代汽车的停车距离传感器。当你倒车时,越靠近墙壁,它发出的哔哔声就越快。这个特定的子网络充当空间传感器,精确地告诉主 AI 它离边界有多近,因此 AI 确切地知道何时开始严格遵守“墙壁规则”而不是“开阔水域规则”。
下表整理了理解所提出的 HB-PINN 模型机制所必需的关键数学符号、变量和参数:
| 符号 | 类型 | 描述 |
|---|---|---|
| $\mathbf{u}$ | 变量 | 流体的速度向量(包含水平和垂直分量 $u$ 和 $v$)。 |
| $p$ | 变量 | 在给定的空间和时间点上的流体压力。 |
| $\rho$ | 参数 | 流体密度(对于不可压缩流保持不变)。 |
| $\nu$ | 参数 | 动力粘度系数,表示流体的内部摩擦或“稠度”。 |
| $q(\mathbf{x}, t)$ | 变量 | 在空间坐标 $\mathbf{x}$ 和时间 $t$ 下,任何感兴趣的被预测的物理量(例如速度或压力)的通用占位符。 |
| $\mathcal{P}_q(\mathbf{x}, t)$ | 函数 | 特解网络 ($\mathcal{N_P}$) 的输出,该网络被严格训练以满足边界条件。 |
| $\mathcal{D}_q(\mathbf{x}, t)$ | 函数 | 距离度量网络 ($\mathcal{N_D}$) 的输出,表示一个点到最近边界的空间距离。 |
| $\mathcal{H}_q(\mathbf{x}, t)$ | 函数 | 主网络 ($\mathcal{N_H}$) 的输出,该网络纯粹专注于求解内部流体动力学(控制偏微分方程)。 |
| $\mathcal{L}$ | 参数 | 损失函数,表示网络试图最小化的误差。它被分为 $\mathcal{L}_{PDE}$(方程误差)和 $\mathcal{L}_{BC}$(边界误差)等部分。 |
| $\lambda_i$ | 参数 | 加权系数,用于告诉网络在训练期间损失函数的哪个部分更重要。 |
| $\alpha$ | 参数 | 一个正值,控制距离函数的增长率(陡度),决定了网络从边界规则到内部规则的过渡有多么剧烈。 |
问题定义与约束
想象一下,要精确预测水流如何绕过一个崎岖的岩石,或者穿过一个复杂的管道系统。传统上,工程师使用计算流体动力学(CFD),这需要为整个流体区域绘制一个微观的、完美的网格——这个过程称为网格生成,它非常繁琐且容易出现数值不稳定性。
物理信息神经网络(PINNs)曾被寄予厚望,提供了一个绝妙的捷径:完全跳过网格,直接教会神经网络物理定律。然而,当应用于现实世界中复杂的形状时,这些网络遇到了巨大的数学障碍。下面我们将详细分析为何会发生这种情况,以及本文试图解决的具体问题。
起始状态与目标状态
输入(当前状态):
我们从一组时空坐标 $(x, t)$ 和流体动力学的控制规则开始,即不可压缩 Navier-Stokes 方程(NSE):
$$ \nabla \cdot \mathbf{u} = 0 $$
$$ \frac{\partial \mathbf{u}}{\partial t} + (\mathbf{u} \cdot \nabla)\mathbf{u} + \frac{1}{\rho}\nabla p - \nu \nabla^2 \mathbf{u} = 0 $$
除了这些方程,我们还有高度复杂的边界条件——例如分段入口或不规则的障碍结构,在这些地方流体速度必须严格为零(无滑移条件)。
输出(目标状态):
期望的最终结果是一个经过训练的神经网络,它能够即时、准确地输出任意给定点的速度矢量 $\mathbf{u}$(由 $u$ 和 $v$ 组成)和流体压力 $p$。
数学鸿沟:
缺失的环节是一个可靠的数学桥梁,它能够强制一个连续的神经网络严格遵守边界处尖锐、不规则的规则,同时又不破坏其计算流体内部平滑、连续物理量的能力。
痛苦的困境
先前的研究人员陷入了一个残酷的权衡,即所谓的“损失冲突问题”。在尝试解决这个问题时,改进一个方面会根本性地破坏另一个方面:
- 软约束陷阱: 在传统的 PINNs 中,你要求网络最小化一个单一的、巨大的损失函数,该函数同时包含物理误差(PDE 损失)和边界误差。但网络会不堪重负。它试图同时最小化两者,但复杂的边界产生了剧烈的数学梯度,在训练过程中会主动对抗物理梯度。最终,网络被迫妥协,导致边界不准确,从而污染了整个流体模拟。
- 硬约束陷阱: 为了解决这个问题,科学家们尝试了“硬约束”PINNs(如 hPINN)。他们通过解析距离函数在数学上强制网络输出在边界处严格为零。这里的痛苦困境是:对于复杂的几何形状,这些精确的数学公式非常不自然。强迫网络通过这些僵化的数学障碍会导致内部流体预测失真、混乱且不连续。你完美地修复了边界,但完全破坏了内部的流体动力学。
严峻的壁垒与约束
是什么使得这个问题如此难以解决?作者们遇到了几个严峻的现实壁垒:
- 几何不可行性: 为了使硬约束生效,你需要一个距离函数 $D_q(x, t)$,它计算任何点到边界的精确距离。对于一个简单的平坦墙壁,这是一个基本的代数方程。对于复杂、分段或不规则的边界,推导一个精确的解析表达式在数学上是不可能的。
- 极端梯度病态: 为了迫使标准网络关注边界,研究人员不得不人为地提高边界损失权重(例如,设置边界权重 $\lambda_2 = 1000$,而物理权重 $\lambda_1 = 1$)。这造成了巨大的不平衡。网络会过度关注记忆边缘,而完全忽略流体的实际控制方程。
- 高度非线性物理: Navier-Stokes 方程因其非线性的对流加速度项 $(\mathbf{u} \cdot \nabla)\mathbf{u}$ 而臭名昭著,难以处理。由于这种非线性,即使在复杂边界处的一个微小误差也会迅速放大,导致整个流动场预测不稳定。
- 网络容量限制: 要求单个神经网络架构同时学习复杂边界处所需的尖锐、高频过渡以及内部流体的平滑、低频物理动力学,这超出了标准优化能力。网络的权重很难同时表示这两种行为。
 Figure 40. Comparison of temperature results at t = 0.25, 0.5, 0.75, and 1.0 for the heat conduction problem: (a) sPINN predictions; (b) HB-PINN predictions; (c) ground truth (GT)
Figure 40. Comparison of temperature results at t = 0.25, 0.5, 0.75, and 1.0 for the heat conduction problem: (a) sPINN predictions; (b) HB-PINN predictions; (c) ground truth (GT)
为何采用此方法
要真正理解作者为何构建混合边界物理信息神经网络(HB-PINN),我们首先需要设身处地,审视他们试图解决问题的根本性质:即使用Navier-Stokes方程(NSE)对流体动力学进行建模。
如果您想知道作者为何不直接采用像GAN、Transformer或Diffusion模型这样流行且前沿的模型,答案在于严格的物理约束。我们并非试图生成逼真的水图像或预测序列中的下一个词。我们需要确定性地求解高度非线性的偏微分方程(PDE)。生成模型将噪声映射到数据分布,当您需要严格的数学遵循物理守恒定律(如质量和动量守恒)时,这几乎是无用的。
由于传统深度学习在此处失效,科学界依赖于物理信息神经网络(PINNs)。PINNs将实际的物理方程嵌入到神经网络的损失函数中。然而,作者遇到了一个巨大的障碍——他们意识到当前“SOTA”的PINNs在实际应用中存在根本性缺陷的那一刻。
问题出现在流体绕复杂障碍物(如封闭腔或分段入口)流动时。传统的PINNs(通常称为软约束PINNs,或sPINNs)试图通过将控制物理方程和边界条件同时塞入一个巨大的损失函数中来学习它们。这会产生严重的“损失冲突”。来自边界条件的梯度和来自内部物理的梯度在反向传播过程中会相互对抗。网络变得混乱,精度急剧下降。
先前修复此问题的尝试包括硬约束PINNs(hPINNs),它强制网络使用精确的解析数学公式来遵守边界。但正如作者在论文附录D中明确展示的那样,当存在复杂、不规则的几何形状时,这些解析函数会失效。它们变得不自然,并在流体域内部产生高度扭曲、不连续和不稳定的输出。
面对这种困境——软约束导致梯度冲突,而硬约束在复杂形状上数学上失效——作者意识到,一个解耦的、复合的架构是唯一可行的解决方案。
他们设计了HB-PINN,通过三个独立的子网络来划分和征服问题:
1. $\mathcal{N_P}$(特解网络):一个仅用于满足边界条件的网络。
2. $\mathcal{N_D}$(距离度量网络):一个学习任意点到边界的空间距离的网络。
3. $\mathcal{N_H}$(主网络):主要网络,完全致力于求解内部的控制PDE。
他们使用一种巧妙的复合公式将这些网络结合起来,用于任何物理量 $q$(如速度或压力):
$$N_q(\mathbf{x}, t) = \mathcal{N}_{\mathcal{P}_q}(\mathbf{x}, t) + \mathcal{N}_{\mathcal{D}_q}(\mathbf{x}, t) \cdot \mathcal{N}_{\mathcal{H}_u}(\mathbf{x}, t)$$
以下是为什么这个特定的数学模型在定性上优于以前的黄金标准。通过预训练 $\mathcal{N_P}$ 和 $\mathcal{N_D}$ 然后冻结它们的权重,距离函数 $\mathcal{N_D}$ 起到了空间门控器的作用。在精确的边界处,$\mathcal{N_D}$ 等于0,这意味着主网络 $\mathcal{N_H}$ 被完全归零,输出完全依赖于边界网络 $\mathcal{N_P}$。当您从边界移向流体内部时,$\mathcal{N_D}$ 平滑地过渡到1,允许主网络 $\mathcal{N_H}$ 接管并求解物理问题。
为了确保这种过渡完美平滑且不会破坏网络稳定性,他们引入了一个幂律函数来优化距离度量:
$$f(\hat{\mathcal{D}}_q) = 1 - (1 - \hat{\mathcal{D}}_q / \max(\hat{\mathcal{D}}_q))^\alpha$$
通过调整参数 $\alpha$,他们可以精确控制网络从边界到内部的过渡陡峭程度。
虽然该论文没有明确声称将内存复杂度从 $O(N^2)$ 降低到 $O(N)$(说实话,这里的计算瓶颈是优化,而不仅仅是内存扩展),但它展示了一个结构优势,使其压倒性地优越:完全消除了梯度病态。由于主网络 $\mathcal{N_H}$ 不再需要担心满足边界条件,它可以完全专注于最小化PDE残差。这种结构解耦导致与XPINN、SA-PINN和PirateNet等SOTA模型相比,均方误差(MSE)降低了一个数量级。
这种方法代表了问题严苛要求与解决方案独特属性之间的完美“结合”。问题要求严格的边界执行,而不依赖于不可能的解析数学;解决方案通过使用神经网络($\mathcal{N_D}$)来近似几何形状,有效地将几何上不可能的硬约束转化为高度灵活、可学习的约束,从而实现了这一点。
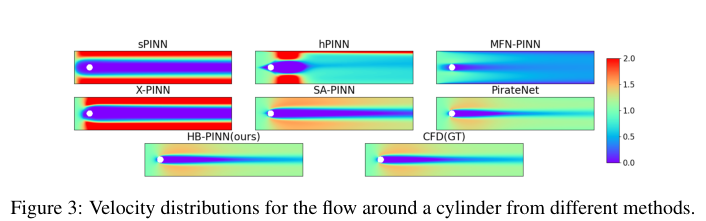 Figure 3. Velocity distributions for the flow around a cylinder from different methods
Figure 3. Velocity distributions for the flow around a cylinder from different methods
数学与逻辑机制
为了理解本文提出的突破性进展,我们必须首先审视模拟流体的基本问题。数十年来,工程师们一直依赖计算流体动力学(CFD)来理解空气如何流过机翼或水如何通过管道。这些传统方法需要“网格划分”——将空间分割成数百万个微小的几何网格。网格划分计算成本高昂、繁琐,并且在边界(如障碍物的形状)变得高度复杂时容易出现不稳定性。
最近,物理信息神经网络(PINNs)作为一种革命性的替代方案应运而生。PINNs 不使用网格,而是利用深度学习来猜测解,如果猜测违反了物理定律(特别是 Navier-Stokes 方程),则对神经网络进行惩罚。然而,标准的 PINNs 遇到了一个巨大的障碍:“损失冲突”。当流体遇到复杂边界时,神经网络会感到困惑。它试图同时满足复杂的边界条件(墙壁)和流体动力学(内部)。为这两个目标而争夺的数学梯度最终会相互抵消,导致模拟的准确性极低。
本文的作者通过创建混合边界 PINN(HB-PINN)解决了这个问题。他们没有强迫一个网络学习所有内容,而是构建了一个复合架构,严格地将边界约束与内部物理学分离开来。
以下是驱动整个框架的核心方程:
$$ \mathcal{N}_q(\mathbf{x}, t) = \mathcal{N}_{\mathcal{P}_q}(\mathbf{x}, t) + \mathcal{N}_{\mathcal{D}_q}(\mathbf{x}, t) \cdot \mathcal{N}_{\mathcal{H}_q}(\mathbf{x}, t) $$
让我们逐一解析这个方程,以确切了解它是如何处理数据的。
- $\mathcal{N}_q(\mathbf{x}, t)$:
- 数学定义: 对于给定空间坐标 $\mathbf{x}$ 和时间 $t$ 下的特定物理量 $q$(可以是速度 $u$、速度 $v$ 或压力 $p$)的最终复合输出函数。
- 物理/逻辑作用: 这是最终产品。它代表了流体在任何给定空间和时间点的确切状态。
- $\mathcal{N}_{\mathcal{P}_q}(\mathbf{x}, t)$:
- 数学定义: 特解网络(Particular Solution Network)的输出。
- 物理/逻辑作用: 它充当“边界执行器”。这是一个预训练的神经网络,其唯一任务是完美地记忆和满足边界条件(例如,确保在固体壁面上的速度恰好为零)。
- $+$(加法运算符):
- 为何使用加法而非乘法? 加法允许叠加原理。网络使用 $\mathcal{N}_{\mathcal{P}_q}$ 作为基础基线。如果作者在此处使用乘法,来自边界网络的零值将像黑洞一样,完全湮灭内部计算出的任何物理量。加法允许模型说:“从这个边界基线开始,然后在此之上添加内部流体动力学。”
- $\mathcal{N}_{\mathcal{D}_q}(\mathbf{x}, t)$:
- 数学定义: 由幂律函数塑造的距离度量网络(Distance Metric Network)的输出。
- 物理/逻辑作用: 这是一个空间掩码或“音量旋钮”。它在边界处输出恰好为 $0$ 的值,并随着你移动到流体内部而迅速增大到 $1$。
- $\cdot$(乘法运算符):
- 为何使用乘法而非加法? 这充当空间乘法器或门控机制。通过将距离度量与主物理网络相乘,方程强制物理网络在边界处乘以 $0$。这完全消除了墙壁处内部物理引擎的声音,确保边界执行器($\mathcal{N}_{\mathcal{P}_q}$)在边缘具有 $100\%$ 的绝对权威。
- $\mathcal{N}_{\mathcal{H}_q}(\mathbf{x}, t)$:
- 数学定义: 主网络(Primary Network)的输出。
- 物理/逻辑作用: 这是繁重的物理引擎。它是一个大型神经网络,完全致力于解决域内部的 Navier-Stokes 方程。
分步流程
想象一个抽象的数据点——一个空间和时间坐标 $(\mathbf{x}, t)$——进入这个数学流水线。
首先,该坐标被复制并同时馈送到三个独立的神经网络。在第一条路径中,特解网络评估该点,并输出一个完美尊重最近壁面的基线物理值。在第二条路径中,距离度量网络测量该点距离边界的远近,输出一个百分比(例如,如果在墙上则为 $0.0$,如果在流体深处则为 $0.99$)。在第三条路径中,主网络计算该点的复杂流体动力学。
接下来,流水线合并。主网络计算出的原始物理量乘以距离百分比。如果该点在墙上,物理量计算结果乘以零并被丢弃。如果它在开放流体中,它几乎完全保留。最后,这个缩放后的物理量计算结果被加到基线边界值上。结果是一个无缝、物理上准确的预测,它完美地尊重复杂的几何形状,而无需网络相互对抗。
优化动力学
要理解这个机制实际上是如何学习的,我们必须看看损失景观是如何形成的。在标准的 PINN 中,损失函数是边界误差和物理误差的混乱组合。梯度(指向网络正确答案的数学箭头)不断发生冲突。
HB-PINN 通过分阶段的优化动力学解决了这个问题。首先,边界网络($\mathcal{N}_{\mathcal{P}}$)和距离网络($\mathcal{N}_{\mathcal{D}}$)被预训练然后冻结。它们的权重被锁定。
由于边界已经完美处理并被锁定,主网络($\mathcal{N}_{\mathcal{H}}$)仅使用物理损失进行优化:
$$ \mathcal{L}_{\mathcal{H}} = \frac{1}{N_{\text{PDE}}} \sum_{i=1}^{N_{\text{PDE}}} \left( \| \nabla \cdot \mathbf{\hat{u}} \|^2 + \left\| \frac{\partial \mathbf{\hat{u}}}{\partial t} + (\mathbf{\hat{u}} \cdot \nabla)\mathbf{\hat{u}} + \frac{1}{\rho}\nabla \hat{p} - \nu\nabla^2\mathbf{\hat{u}} \right\|^2 \right) $$
在这里,作者使用对 $N_{\text{PDE}}$ 个离散配置点(collocation points)的求和($\sum$)而不是连续空间积分。为什么?因为神经网络通过离散的数据批次进行学习。我们无法在计算机内存中计算无限数量点的真实连续积分,因此我们采样数千个离散点并对它们的误差求和来近似积分。
范数($\| ... \|^2$)内的项是不可压缩 Navier-Stokes 方程(质量守恒和动量守恒)的精确残差。由于边界约束由冻结的子网络在数学上保证,$\mathcal{L}_{\mathcal{H}}$ 的损失景观被大大平滑了。梯度不再遭受病态冲突。它们严格指向最小化物理残差的下坡方向。网络收敛得更快,避免了由几何复杂性引起的局部最小值,并通过简单地允许物理引擎将其 $100\%$ 的学习能力完全集中在流体动力学上,从而实现了 SOTA 精度。
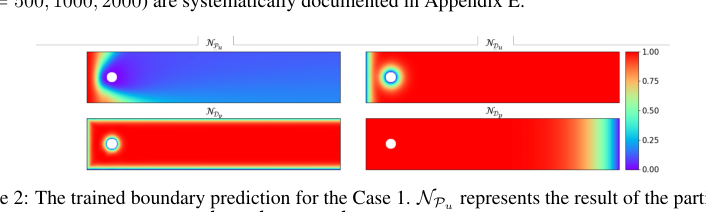 Figure 2. The trained boundary prediction for the Case 1. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
Figure 2. The trained boundary prediction for the Case 1. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
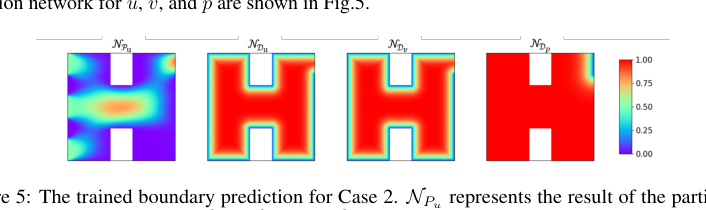 Figure 5. The trained boundary prediction for Case 2. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
Figure 5. The trained boundary prediction for Case 2. NPu represents the result of the particular solution network for u, while NDu, NDv, and NDp respectively represent the results of the distance metric network for u, v, and p
结果、局限性与结论
背景:河流的规则与学习规则的人工智能
要理解本文,我们首先需要理解两个概念:Navier-Stokes 方程 (NSE) 和物理信息神经网络 (PINNs)。
想象一下,您正试图精确预测水流过河流中一块岩石时的情形。在物理学中,我们使用 Navier-Stokes 方程,它们本质上是液体和气体的基本运动定律。它们计算压力、速度和粘度如何相互作用。然而,这些方程以难以求解而闻名。传统上,工程师使用计算流体动力学 (CFD),这涉及将河流分割成数百万个微小的数字网格(网格生成),并为每个网格计算数学。这种方法精度很高,但速度极慢且计算成本极高。
现在,PINNs 应运而生。我们不将空间分割成网格,而是让人工智能(神经网络)来猜测水流。但我们并非让它盲目猜测;我们将 Navier-Stokes 方程直接嵌入到 AI 的“损失函数”(其惩罚系统)中。如果 AI 猜测的流体行为违反了物理定律,它就会受到惩罚。随着时间的推移,它就能学会预测物理上准确的流体动力学,而无需复杂的网格。
然而,这里有一个问题:边界条件 (BCs)。河流的规则在边界处会发生变化。例如,接触岩石表面的水的速度为零(这称为无滑移条件)。
动机与约束:“损失冲突”
本文解决的核心问题是,标准的 PINNs 在多任务处理方面表现极差。
当标准的 PINN 尝试解决流体问题时,它必须同时最小化两个惩罚:
1. PDE 损失:“我是否遵守了河流中部流体的物理规律?”
2. BC 损失:“我是否遵守了水在岩石表面完全停止运动的规则?”
当边界简单时(例如直线管道),AI 可以很好地处理。但当边界复杂时——例如多个锯齿状岩石或分段入口——AI 会遇到损失冲突。边界规则和内部物理规律的梯度(指导 AI 如何改进的数学提示)开始相互对抗。AI 会感到困惑,做出妥协,最终在两方面都失败。
作者必须克服的约束是找到一种方法来严格执行边界规则,同时又不干扰 AI 在内部区域学习物理规律的能力,并且保持数学的平滑性和可微性,以便神经网络能够实际处理。
数学解释:他们解决了什么以及如何解决
作者通过完全解耦问题来解决这一难题。他们没有强迫一个 AI 完成所有任务,而是创建了一个混合边界 PINN (HB-PINN),该网络使用三个专门的子网络。
从数学上讲,他们使用以下优美的复合方程重新定义了任何物理量 $q(x, t)$(如速度或压力)的预测:
$$q(x, t) = \mathcal{N}_{P_q}(x, t) + \mathcal{N}_{D_q}(x, t) \cdot \mathcal{N}_{H_q}(x, t)$$
让我们详细分析一下这意味着什么:
- $\mathcal{N}_{P_q}$(特解网络): 这个网络经过预训练,有一个主要任务:满足边界条件。它学习流体在壁面处的行为。
- $\mathcal{N}_{D_q}$(距离度量网络): 这是巧妙之处。它计算一个点到边界的距离。它在边界处输出精确的 $0$,并随着您移向开放流体而迅速增加到 $1$。他们使用了一个特定的幂律函数来控制这种过渡:
$$f(\hat{D}_q) = 1 - (1 - \hat{D}_q / \max(\hat{D}_q))^\alpha$$ - $\mathcal{N}_{H_q}$(主网络): 这个网络仅专注于流体内部的 Navier-Stokes 方程。
再次查看主方程。在边界处,距离网络 $\mathcal{N}_{D_q}$ 输出 $0$。这意味着 $0 \cdot \mathcal{N}_{H_q}$ 变为 $0$,内部网络被完全抑制。最终答案就是 $\mathcal{N}_{P_q}$,它完美地满足了边界规则!当您远离壁面时,$\mathcal{N}_{D_q}$ 变为 $1$,允许主网络 $\mathcal{N}_{H_q}$ 接管并解决物理问题。损失冲突在数学上被消除了。
实验架构与“牺牲品”
作者并没有仅仅在表格上列出一些数字来宣称胜利;他们设计了一个残酷的测试环境。他们设置了三种流体动力学场景,最终达到了高度复杂的“分段入口带障碍方腔”(本质上是一个带有多个阻塞入口和内部壁的盒子),并在稳态和瞬态(随时间变化)条件下进行了测试。
实验中的“牺牲品”是物理 AI 领域最先进的模型:
* sPINN(标准基线)
* hPINN(硬约束 PINN,先前尝试修复边界)
* MFN-PINN(改进的傅里叶网络)
* XPINN & SA-PINN(先进的域分解和自适应模型)
* PirateNet(一个非常近期、高度鲁棒的架构)
决定性证据:
HB-PINN 优越性的无可辩驳的证明不仅仅在于均方误差 (MSE) 表格——尽管将误差降低一个数量级已经令人印象深刻。决定性的证据在于可视化残差图。
作者使用高保真计算流体动力学 (CFD) 作为绝对的 Ground Truth。当查看误差(残差)的热力图时,受损模型在内部障碍物的角落和复杂入口处显示出大量明显的红色区域(高误差)。基线模型根本无法解决奇怪边界附近的物理问题。与此形成鲜明对比的是,HB-PINN 的残差图几乎在整个域上都是深蓝色(接近零误差)。
此外,他们通过将雷诺数提高到 2000(使流体高度混沌)来增加难度。虽然基线模型的误差飙升,但 HB-PINN 保持了其结构完整性和准确性,证明了该解耦机制在极端现实条件下有效。
未来讨论话题
基于这篇精彩的论文,以下是一些关于未来研究和批判性思考的多样化视角和话题:
1. $\alpha$ 参数的自动化
在距离度量网络中,从壁面到内部过渡的陡峭程度由一个称为 $\alpha$ 的参数控制。作者指出,他们目前通过经验确定该值(通过反复试验,发现 $\alpha=5$ 在案例 2 中效果很好)。我们能否通过使 $\alpha$ 成为一个可学习的参数来发展这个框架?如果网络能够根据局部流体湍流动态调整边界层的陡峭度,它就可以使模型完全自适应。
2. 扩展到 3D 和移动边界
这里的实验严格是二维的,且障碍物是静态的。在现实世界的工程中(例如无人机的螺旋桨或跳动的人类心脏),边界是三维的并且不断移动。坦白说,我不太确定在高度复杂的三维几何形状下,采样距离度量的计算开销在理论上如何扩展,因为作者主要关注二维的经验时间。讨论如何在具有移动边界的四维时空连续体中高效计算 $\mathcal{N}_D$ 是一个关键的下一步。
3. 预训练与端到端学习的成本
HB-PINN 需要在训练主网络 ($\mathcal{N}_H$) 之前预训练特解网络 ($\mathcal{N}_P$) 和距离网络 ($\mathcal{N}_D$)。虽然这解决了损失冲突,但它引入了一个多阶段的流程。在更简单的场景中,训练三个独立网络的计算成本是否合理?一个有价值的讨论将是探索这三个网络是否可以统一到一个具有新颖门控机制的单一架构中,该机制可以在无需顺序预训练的情况下实现相同的数学解耦。
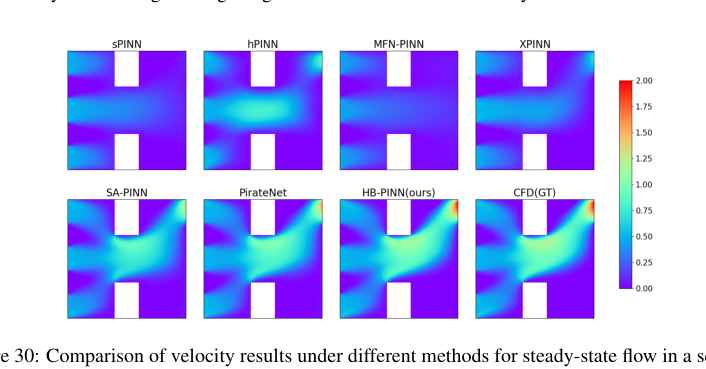 Figure 30. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 500
Figure 30. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 500
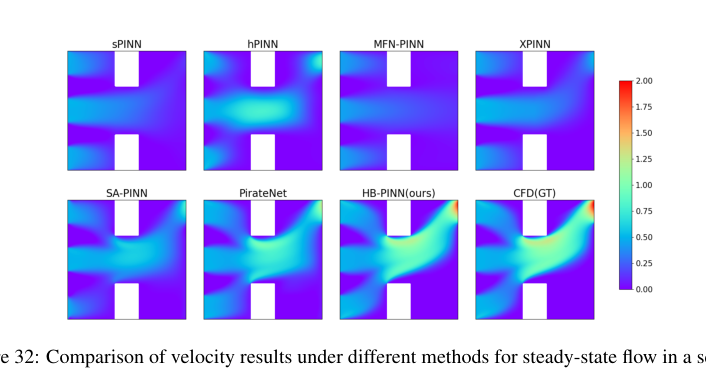 Figure 32. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 1000
Figure 32. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 1000
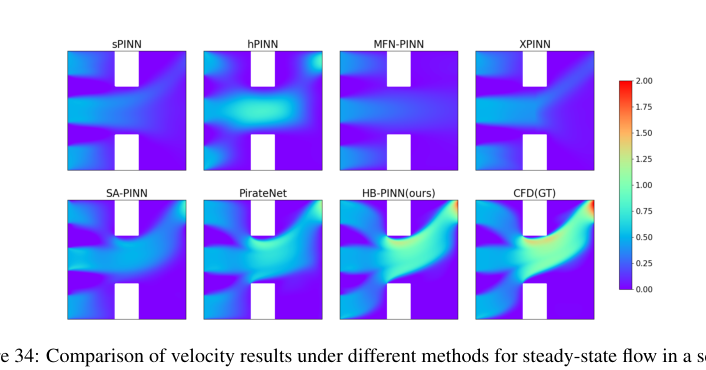 Figure 34. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 2000
Figure 34. Comparison of velocity results under different methods for steady-state flow in a square cavity with obstructed segmented inlet at Reynolds number Re = 2000