सक्रिय नेमेटिक अशांति में गतिकीय अवरोध
सक्रिय तरल पदार्थों का अध्ययन, जो आणविक मोटर, कोशिकाओं या सिंथेटिक कणों जैसे आंतरिक घटकों द्वारा संचालित होते हैं, दशकों से अनुसंधान का एक जीवंत क्षेत्र रहा है। यह आंतरिक गतिविधि स्वतःस्फूर्त, अक्सर अराजक प्रवाह...
पृष्ठभूमि और अकादमिक वंश
उत्पत्ति और अकादमिक वंश
सक्रिय तरल पदार्थों का अध्ययन, जो आणविक मोटर, कोशिकाओं या सिंथेटिक कणों जैसे आंतरिक घटकों द्वारा संचालित होते हैं, दशकों से अनुसंधान का एक जीवंत क्षेत्र रहा है। यह आंतरिक गतिविधि स्वतःस्फूर्त, अक्सर अराजक प्रवाह उत्पन्न करती है, जिसे सामूहिक रूप से सक्रिय अशांति कहा जाता है। यह घटना विभिन्न प्रकार की प्रणालियों में देखी गई है, जिनमें जीवाणु निलंबन, शुक्राणु, साइटोस्केलेटल मिश्रण, कोशिका मोनोलेयर्स और कृत्रिम स्व-चालित कण [1, 2-31] शामिल हैं। ऐतिहासिक रूप से, ये प्रवाह, कम रेनॉल्ड्स संख्या पर होने के बावजूद जहां जड़ता नगण्य है, क्लासिक जड़त्वीय अशांति से आश्चर्यजनक समानता रखते हैं।
सक्रिय नेमेटिक अशांति के क्षेत्र में हालिया प्रगति - एक विशिष्ट प्रकार का सक्रिय तरल पदार्थ जहां लम्बी कण संरेखित होते हैं - ने कुछ विशेषताओं के लिए सार्वभौमिक स्केलिंग कानून उजागर किए हैं, जैसे कि वेग शक्ति स्पेक्ट्रम [22,32,33]। उदाहरण के लिए, छोटे तरंग संख्याओं $q$ पर वेग शक्ति स्पेक्ट्रम का $q^{-1}$ स्केलिंग उल्लेखनीय रूप से मजबूत पाया गया, जो विशिष्ट सामग्री गुणों जैसे चिपचिपाहट या गतिविधि से स्वतंत्र है, बशर्ते रेनॉल्ड्स संख्या कम रहे [34]। यह सार्वभौमिक व्यवहार दोष-युक्त और दृढ़ता से व्यवस्थित दोष-मुक्त नेमेटिक्स दोनों में देखा गया [32,33]।
हालांकि, हमारी समझ में एक महत्वपूर्ण अंतर बना रहा: जबकि ये सार्वभौमिक स्केलिंग कानून स्थापित किए गए थे, प्रवाह क्षेत्र की अन्य, गैर-सार्वभौमिक विशेषताओं पर सामग्री गुणों और टोपोलॉजिकल दोषों की उपस्थिति या अनुपस्थिति के प्रभाव का काफी हद तक पता नहीं लगाया गया था। स्पष्टता की यह कमी एक मौलिक सीमा का प्रतिनिधित्व करती है। पिछले दृष्टिकोण, हालांकि सार्वभौमिक पहलुओं को चिह्नित करने में सफल रहे, ने पर्याप्त रूप से यह नहीं समझाया कि प्रवाह-संरेखण पैरामीटर या दोष निर्माण की ऊर्जा लागत जैसे कारक इन सार्वभौमिक स्केलिंग से परे जटिल पैटर्न और गतिकी को कैसे आकार देंगे। इस प्रकार, यह पत्र विशेष रूप से दोष-मुक्त सक्रिय नेमेटिक्स में "गतिकीय अवरोध" की घटना की सटीक जांच करने के लिए प्रेरित हुआ, एक ऐसी स्थिति जो पहले कभी नहीं देखी गई और समझाई गई थी।
सहज डोमेन शब्द
इस पत्र में प्रयुक्त विशिष्ट शब्दों को एक पूर्ण शुरुआती व्यक्ति को सहज रूप से समझने में मदद करने के लिए, यहां कुछ रोजमर्रा की समानताएं दी गई हैं:
- सक्रिय तरल पदार्थ: सूप के एक कटोरे की कल्पना करें जहां प्रत्येक छोटा घटक (जैसे पास्ता का एक टुकड़ा या सब्जी का टुकड़ा) का अपना लघु मोटर होता है और लगातार घूमता रहता है, सूप को अंदर से हिलाता रहता है। नियमित सूप के विपरीत जिसे हिलाने के लिए चम्मच की आवश्यकता होती है, यह सूप पूरी तरह से स्व-हिलाने वाला होता है।
- नेमेटिक क्रम: लम्बी घास के मैदान की कल्पना करें। एक सामान्य, अव्यवस्थित अवस्था में, ब्लेड सभी दिशाओं में इंगित कर सकते हैं। लेकिन नेमेटिक क्रम के साथ, अधिकांश घास के ब्लेड मोटे तौर पर एक ही दिशा में संरेखित होते हैं, जैसे कि वे सभी एक हल्की हवा में एक साथ झूल रहे हों। यह पसंदीदा सामूहिक दिशा वह है जिसे वैज्ञानिक "निर्देशक" कहते हैं।
- सक्रिय नेमेटिक अशांति: अब, स्व-हिलाने वाले सूप को संरेखित घास के ब्लेड के साथ मिलाएं। यदि आंतरिक मोटर बहुत शक्तिशाली और अराजक हैं, तो वे केवल धीरे-धीरे संरेखित नहीं होते हैं; वे घुमावदार, अप्रत्याशित और अत्यधिक गतिशील धाराएं बनाते हैं, जो एक जंगली नदी की धारा या एक अराजक धुएं के प्लम की तरह होती हैं, लेकिन सभी सामग्री द्वारा स्वयं उत्पन्न होती हैं। यह सक्रिय नेमेटिक अशांति है।
- टोपोलॉजिकल दोष: संरेखित घास के हमारे मैदान में, एक टोपोलॉजिकल दोष एक छोटे, स्थानीयकृत "गांठ" या "भंवर" की तरह होता है जहां घास के ब्लेड अचानक अपने सामूहिक संरेखण को खो देते हैं और एक केंद्रीय बिंदु के चारों ओर घूमते हैं, या विरोधी दिशाओं में इंगित करते हैं। यह एक अन्यथा व्यवस्थित प्रणाली के भीतर तीव्र अव्यवस्था का एक बिंदु है।
- गतिकीय अवरोध: कारों के साथ एक व्यस्त राजमार्ग की कल्पना करें जो लगातार चल रही हैं और लेन बदल रही हैं, जिससे एक तरल, लगातार बदलता हुआ यातायात पैटर्न बनता है। गतिकीय अवरोध उस यातायात प्रवाह की तरह है जो अचानक "सड़कों" और "धाराओं" के एक निश्चित, वृक्ष-जैसे नेटवर्क में बस जाता है। कारें अभी भी इन रास्तों पर चलती हैं, लेकिन सड़क नेटवर्क की समग्र संरचना स्वयं स्थिर हो जाती है और नाटकीय रूप से विकसित होना बंद कर देती है। प्रणाली का अराजक विकास एक स्थायी, संगठित पैटर्न में " जम" जाता है।
संकेतन तालिका
| संकेतन | प्रकार | विवरण |
|---|---|---|
| $\mathbf{v}$ | चर | प्रवाह वेग क्षेत्र |
| $\mathbf{n}$ | चर | नेमेटिक निर्देशक क्षेत्र (छड़-जैसे कणों का स्थानीय औसत अभिविन्यास) |
| $\psi$ | चर | प्रवाह फलन (असंपीड्य प्रवाह का वर्णन करता है) |
| $s$ | चर | अदिश क्रम पैरामीटर (स्थानीय नेमेटिक संरेखण शक्ति को मापता है) |
| $Q_{\alpha\beta}$ | चर | नेमेटिक क्रम पैरामीटर टेंसर (नेमेटिक क्रम और संरेखण का वर्णन करता है) |
| $K$ | पैरामीटर | लोचदार स्थिरांक (निर्देशक क्षेत्र विकृतियों के प्रतिरोध को मापता है) |
| $\eta$ | पैरामीटर | अपरूपण चिपचिपाहट (अपरूपण प्रवाह के प्रति तरल पदार्थ का प्रतिरोध) |
| $\zeta$ | पैरामीटर | सक्रिय तनाव पैरामीटर (आंतरिक सक्रिय ड्राइविंग की शक्ति) |
| $v$ | पैरामीटर | प्रवाह-संरेखण पैरामीटर (अपरूपण के तहत नेमेटिक्स को पुन: उन्मुख करने की प्रवृत्ति) |
| $\gamma$ | पैरामीटर | घूर्णी चिपचिपाहट (निर्देशक क्षेत्र घूर्णन के प्रति प्रतिरोध) |
| $A$ | पैरामीटर | गतिविधि संख्या (सिस्टम आकार के सापेक्ष सक्रिय बल का आयामहीन माप) |
| $R$ | पैरामीटर | चिपचिपाहट अनुपात (घूर्णी से अपरूपण चिपचिपाहट का अनुपात, $\gamma/\eta$) |
| $S$ | पैरामीटर | सक्रिय तनाव का चिन्ह ($\pm 1$ विस्तारशील/संकुचित प्रणालियों के लिए) |
| $\epsilon$ | पैरामीटर | दोष कोर आकार (टोपोलॉजिकल दोष कोर का विशिष्ट आकार) |
समस्या परिभाषा और बाधाएँ
मुख्य समस्या सूत्रीकरण और दुविधा
यह पत्र सक्रिय नेमेटिक अशांति की हमारी समझ में एक महत्वपूर्ण अंतर को संबोधित करता है, एक ऐसी घटना जहां तरल पदार्थों में आंतरिक रूप से संचालित घटक स्वतःस्फूर्त, अराजक प्रवाह बनाते हैं। पिछले शोधों ने स्थापित किया है कि सक्रिय नेमेटिक अशांति के वेग शक्ति स्पेक्ट्रम सार्वभौमिक स्केलिंग कानूनों को प्रदर्शित करते हैं, जो काफी हद तक विशिष्ट सामग्री गुणों या टोपोलॉजिकल दोषों की उपस्थिति से स्वतंत्र होते हैं। हालांकि, गैर-सार्वभौमिक विशेषताओं पर सामग्री गुणों और टोपोलॉजिकल दोषों की अनुपस्थिति के सटीक प्रभाव का काफी हद तक पता नहीं लगाया गया था।
इस पत्र के लिए प्रारंभिक बिंदु (इनपुट/वर्तमान स्थिति) सक्रिय नेमेटिक अशांति है, विशेष रूप से "दोष-मुक्त" व्यवस्था में। यह दोष-मुक्त स्थिति या तो स्पष्ट मॉडल निर्माण (निर्देशक-आधारित मॉडल जहां निर्देशक क्षेत्र का एक निश्चित मापांक होता है, दोष निर्माण को रोकता है) या उन स्थितियों द्वारा प्राप्त की जाती है जहां दोष कोर के लिए ऊर्जा लागत निषेधात्मक रूप से उच्च होती है (छोटे दोष कोर आकार के साथ क्यू-टेंसर मॉडल में)। सिस्टम को सक्रिय तनाव पैरामीटर $\zeta$ और प्रवाह-संरेखण पैरामीटर $v$ जैसे मापदंडों द्वारा चित्रित किया जाता है, जो तरल क्रिस्टल की अपरूपण के तहत पुन: उन्मुख होने की प्रवृत्ति का वर्णन करता है।
वांछित अंतिम बिंदु (आउटपुट/लक्ष्य स्थिति) प्रवाह-संरेखण पैरामीटर $v$ और टोपोलॉजिकल दोषों के दमन का प्रवाह क्षेत्र की स्थानिक-सामयिक संरचना और गतिकी पर कैसे प्रभाव पड़ता है, इसकी व्यापक समझ है। लेखक दोष-मुक्त सक्रिय नेमेटिक अशांति में उपन्यास "अवरुद्ध पैटर्न" को उजागर करने और चित्रित करने का लक्ष्य रखते हैं, जो दोषों की उपस्थिति में आमतौर पर देखी जाने वाली अराजक प्रवाह से अलग होते हैं। अंततः, लक्ष्य इस "गतिकीय अवरोध" के अंतर्निहित तंत्र को स्पष्ट करना है, विशेष रूप से यह कैसे नेमेटिक डोमेन दीवारों की एक उभरती हुई प्रभावी टोपोलॉजी और उनके कनेक्टिविटी नियमों से उत्पन्न होता है।
इस पत्र द्वारा पुल करने का प्रयास किया गया सटीक लुप्त कड़ी या गणितीय अंतर एक सैद्धांतिक और कम्प्यूटेशनल ढांचा है जो व्यवस्थित रूप से प्रवाह संरेखण, सक्रिय तनाव और टोपोलॉजिकल दोषों की अनुपस्थिति के बीच परस्पर क्रिया का पता लगा सकता है ताकि सक्रिय अशांति के भीतर व्यवस्थित, अवरुद्ध अवस्थाओं के उद्भव की व्याख्या की जा सके। जबकि सार्वभौमिक स्केलिंग कानून ज्ञात थे, दोष-मुक्त प्रणालियों में विशिष्ट, गैर-सार्वभौमिक पैटर्न और गतिकी का काफी हद तक अज्ञात था। यह पत्र प्रदान करने का प्रयास करता है कि ये कारक अराजक अशांति से गतिकीय रूप से अवरुद्ध अवस्था में संक्रमण का कारण कैसे बनते हैं, इसका एक विस्तृत गणितीय और भौतिक स्पष्टीकरण।
इस विशिष्ट समस्या को हल करने का प्रयास करने वाले पिछले शोधकर्ताओं को फंसाने वाला दर्दनाक ट्रेड-ऑफ या दुविधा स्वयं सक्रिय अशांति की प्रकृति में निहित है। सक्रिय अशांति अक्सर स्थायी, अराजक, भंवर-प्रमुख प्रवाह की विशेषता होती है, जिसमें टोपोलॉजिकल दोष अक्सर इस अराजकता के प्रमुख चालक और आयोजक के रूप में कार्य करते हैं। दुविधा यह है कि जबकि दोष अव्यवस्था के स्रोत हैं, वे कुछ व्यवस्थाओं में स्थायी अशांति को भी सक्षम करते हैं। यह पत्र बताता है कि विस्तारशील छड़-जैसे नेमेटिक्स में, टोपोलॉजिकल दोषों की अनुपस्थिति, अशांति के एक सरल रूप की ओर ले जाने के बजाय, एक "गतिकीय अवरोध" का परिणाम होती है। इसका तात्पर्य एक प्रति-सहज ज्ञान युक्त ट्रेड-ऑफ है: अराजकता के स्रोत (दोष) को हटाने से आवश्यक रूप से अधिक व्यवस्थित अशांत अवस्था नहीं होती है, बल्कि एक पूरी तरह से अलग, अवरुद्ध और कम गतिशील व्यवस्था होती है। यह पारंपरिक दृष्टिकोण को चुनौती देता है कि दोष केवल विघटनकारी होते हैं और अशांत गतिकी को बनाए रखने में उनकी भूमिका को उजागर करता है।
बाधाएँ और विफलता मोड
सक्रिय नेमेटिक अशांति में गतिकीय अवरोध को समझने की समस्या को कई कठोर, यथार्थवादी बाधाओं द्वारा अविश्वसनीय रूप से कठिन बनाया गया है:
-
भौतिक/सामग्री बाधाएँ:
- दोष-मुक्त आवश्यकता: "दोष-मुक्त" सक्रिय नेमेटिक अशांति पर मुख्य ध्यान एक महत्वपूर्ण बाधा है। टोपोलॉजिकल दोष अधिकांश सक्रिय नेमेटिक प्रणालियों में सर्वव्यापी होते हैं और अक्सर अराजक प्रवाह के प्राथमिक चालक होते हैं। प्रयोगात्मक रूप से एक वास्तव में दोष-मुक्त सक्रिय नेमेटिक प्रणाली का एहसास करना और बनाए रखना अत्यंत चुनौतीपूर्ण है। यह पत्र एक निर्देशक-आधारित मॉडल का उपयोग करके इसे संबोधित करता है जो निर्माण द्वारा दोषों को निषिद्ध करता है (निश्चित मापांक $|n|=1$) और एक क्यू-टेंसर मॉडल जहां दोषों का निर्माण विफल हो जाता है क्योंकि उनके कोर से जुड़ी ऊर्जा लागत बहुत अधिक होती है।
- पैरामीटर संवेदनशीलता: गतिकीय अवरोध की घटना सामग्री गुणों के परस्पर क्रिया के प्रति अत्यधिक संवेदनशील है, विशेष रूप से प्रवाह-संरेखण पैरामीटर $v$ और सक्रिय तनाव पैरामीटर $\zeta$। अवरुद्ध अवस्था केवल विस्तारशील संरेखण व्यवस्था ($\zeta v < 0$ छड़-जैसे नेमेटिक्स के लिए $v \le 0$ के साथ) में देखी जाती है। इसका मतलब है कि यह घटना सभी सक्रिय नेमेटिक प्रणालियों में सार्वभौमिक नहीं है, बल्कि एक विशिष्ट, संकीर्ण पैरामीटर स्थान तक सीमित है।
- कम रेनॉल्ड्स संख्या: सैद्धांतिक ढांचा और सिमुलेशन सख्ती से "लुप्त रेनॉल्ड्स संख्या" पर संचालित होते हैं, जिसका अर्थ है कि जड़त्वीय प्रभाव नगण्य हैं। जबकि यह हाइड्रोडायनामिक्स को सरल बनाता है, यह निष्कर्षों की प्रत्यक्ष प्रयोज्यता को उन प्रणालियों तक सीमित करता है जहां जड़ता एक महत्वपूर्ण भूमिका निभाती है, संभावित रूप से प्रवाह पैटर्न और स्थिरता को बदल सकती है।
- दोष कोर आकार सीमा: अधिक सामान्य क्यू-टेंसर मॉडल में, दोष कोर आकार $\epsilon$ और सक्रिय लंबाई $l_a$ का अनुपात एक महत्वपूर्ण नियंत्रण पैरामीटर है। गतिकीय अवरोध केवल तभी बना रहता है जब $\epsilon \ll l_a$, जिसका अर्थ है कि दोष न्यूक्लियेशन ऊर्जावान रूप से दबा हुआ है। यदि $\epsilon$ एक महत्वपूर्ण सीमा (निश्चित $Sv = -1$ के लिए लगभग $0.25 l_a$) से अधिक हो जाता है, तो दोष न्यूक्लियेट होते हैं, जिससे अवरुद्ध अवस्था का विघटन होता है और दोष-युक्त अशांति में संक्रमण होता है। यह घटना को देखने के लिए एक सख्त भौतिक स्थिति लागू करता है।
-
कम्प्यूटेशनल बाधाएँ:
- बड़े पैमाने पर सिमुलेशन: गतिकीय अवरोध के उभरते पैटर्न और दीर्घकालिक गतिकी को देखने के लिए "बड़े पैमाने पर संख्यात्मक सिमुलेशन" की आवश्यकता होती है। यह विभिन्न पैरामीटर व्यवस्थाओं और सिस्टम आकारों का पता लगाने के लिए, विशेष रूप से पर्याप्त कम्प्यूटेशनल व्यय और समय में तब्दील होता है।
- क्यू-टेंसर मॉडल की संख्यात्मक कठोरता: पूर्ण क्यू-टेंसर मॉडल का अनुकरण करना, विशेष रूप से छोटे दोष कोर आकार ($\epsilon \to 0$) की सीमा में, "बढ़ता हुआ कठोर और कम्प्यूटेशनल रूप से महंगा" हो जाता है। यह कठोरता संभावित दोष कोर से जुड़े तेज ग्रेडिएंट्स और छोटे लंबाई के पैमानों को हल करने की आवश्यकता से उत्पन्न होती है, जिससे सरल निर्देशक-आधारित मॉडल इस सीमा में एक अधिक व्यावहारिक विकल्प बन जाता है।
- जटिल हाइब्रिड संख्यात्मक योजना: सिमुलेशन एक परिष्कृत हाइब्रिड संख्यात्मक योजना का उपयोग करते हैं, जो गति संतुलन के लिए एक छद्म-स्पेक्ट्रल विधि और कोण क्षेत्र विकास के लिए एक परिमित-तत्व विधि को जोड़ती है। यह जटिल सेटअप, जिसमें संवहनी शब्दों के लिए विशेषताओं-गैलेरकिन, लाप्लासियन शब्दों के लिए अंतर्निहित उपचार, और समय विकास के लिए एडम्स-बैशफोर्थ जैसी तकनीकें शामिल हैं, शामिल विभिन्न भौतिक घटनाओं में संख्यात्मक स्थिरता और सटीकता सुनिश्चित करने के लिए आवश्यक है।
- सिस्टम आकार सीमाएँ: जबकि लेखकों ने अवरोध की दृढ़ता का परीक्षण करने के लिए "और भी बड़े सिस्टम आकारों" पर सिमुलेशन किए, इन "के लिए काफी अधिक कम्प्यूटेशनल प्रयास की आवश्यकता थी।" यह इंगित करता है कि कम्प्यूटेशनल संसाधन इन घटनाओं का अध्ययन किए जा सकने वाले पैमाने पर एक व्यावहारिक सीमा लगाते हैं, जो वास्तव में मैक्रोस्कोपिक प्रणालियों में बहुत लंबी दूरी के सहसंबंधों या अवरुद्ध अवस्थाओं की स्थिरता के अवलोकन को प्रभावित कर सकते हैं।
-
डेटा-संचालित/प्रायोगिक बाधाएँ:
- प्रायोगिक सत्यापन की कमी: एक बड़ी बाधा यह है कि "दोष-मुक्त सक्रिय नेमेटिक्स के लिए हमारी भविष्यवाणियों को मान्य करना एक प्रायोगिक चुनौती प्रस्तुत करता है" क्योंकि "गतिकीय अवरोध - हमारी प्राथमिक भविष्यवाणी - अभी तक प्रयोगात्मक रूप से महसूस नहीं की गई है।" जबकि छद्म-दोष और भूलभुलैया पैटर्न जैसे कुछ तत्वों का अवलोकन किया गया है, स्थायी, सिस्टम-व्यापी अवरुद्ध अवस्था प्रयोगों में मायावी बनी हुई है। इसके लिए उपन्यास सक्रिय सामग्रियों की खोज की आवश्यकता होती है जहां दोष न्यूक्लियेशन वर्तमान में अध्ययन की गई प्रणालियों की तुलना में काफी अधिक महंगा हो।
- दोषों को नियंत्रित करने में कठिनाई: प्रायोगिक सक्रिय नेमेटिक प्रणालियों में टोपोलॉजिकल दोषों को सटीक रूप से नियंत्रित करने या दबाने की क्षमता एक महत्वपूर्ण बाधा है। अधिकांश प्रायोगिक सेटअप स्वाभाविक रूप से दोष उत्पन्न करते हैं, जिससे मॉडल द्वारा अनुमानित दोष-मुक्त व्यवस्था को अलग करना और उसका अध्ययन करना मुश्किल हो जाता है।
यह दृष्टिकोण क्यों
चुनाव की अनिवार्यता
लेखकों द्वारा निर्देशक-आधारित दोष-मुक्त मॉडल का चुनाव केवल एक वरीयता नहीं थी, बल्कि उस समस्या द्वारा निर्देशित एक अनिवार्यता थी जिसे उन्होंने हल करने के लिए निर्धारित किया था: "सक्रिय नेमेटिक अशांति में गतिकीय अवरोध" का अध्ययन करना टोपोलॉजिकल दोषों की अनुपस्थिति में। पारंपरिक "SOTA" (State-Of-The-Art) विधियाँ, जैसे कि मानक क्यू-टेंसर मॉडल, टोपोलॉजिकल दोषों के न्यूक्लियेशन और गतिकी को ध्यान में रखने के लिए डिज़ाइन की गई हैं, जो अधिकांश सक्रिय नेमेटिक प्रणालियों में सर्वव्यापी हैं। हालांकि, इस पत्र की मुख्य नवीनता उन व्यवस्थाओं का पता लगाने में निहित है जहां ये दोष या तो ऊर्जावान रूप से दबाए जाते हैं या निर्माण द्वारा पूरी तरह से निषिद्ध होते हैं।
जिस क्षण लेखकों को एहसास हुआ कि पारंपरिक तरीके अपर्याप्त थे, वह तब था जब उन्होंने दोष-मुक्त अवस्था की जांच करने का निर्णय लिया। उनके चुने हुए मॉडल, एक पिछले न्यूनतम मॉडल [33] का एक सामान्यीकरण, स्पष्ट रूप से नेमेटिक निर्देशक क्षेत्र के लिए एक निश्चित मापांक $|n|=1$ लागू करता है। यह बाधा, जैसा कि अनुभाग II में कहा गया है, "टोपोलॉजिकल दोषों के निर्माण को रोकता है [33,38]।" यह जानबूझकर डिजाइन विकल्प आवश्यक था क्योंकि गतिकीय अवरोध की घटना, जो डोमेन दीवारों के स्थिर, वृक्ष-जैसे पैटर्न की विशेषता है, गतिशील टोपोलॉजिकल दोषों की अराजक गतिकी द्वारा मौलिक रूप से बदल जाती है या यहां तक कि रोकी जाती है। दोष-मुक्त वातावरण की गारंटी देने वाले मॉडल के बिना, इस उपन्यास अवरुद्ध अवस्था को अलग करना और चित्रित करना असंभव होता। क्यू-टेंसर मॉडल, हालांकि अधिक सामान्य है, दोषों को पेश करता, लेखकों द्वारा उजागर की जाने वाली विशिष्ट गतिकी को अस्पष्ट करता।
तुलनात्मक श्रेष्ठता
सरल प्रदर्शन मेट्रिक्स से परे, निर्देशक-आधारित दोष-मुक्त मॉडल इस विशिष्ट शोध प्रश्न के लिए गहन गुणात्मक श्रेष्ठता प्रदान करता है। इसका संरचनात्मक लाभ उन घटनाओं को अलग करने और उजागर करने की क्षमता में निहित है जो अन्यथा टोपोलॉजिकल दोषों की अराजक गतिकी से छिपी होती हैं।
- गतिकीय अवरोध का अनावरण: सबसे महत्वपूर्ण गुणात्मक लाभ स्वयं "गतिकीय अवरोध" अवस्था को प्रकट करने की इसकी क्षमता है। विस्तारशील संरेखण नेमेटिक्स ($S\nu < -1$) में, मॉडल दिखाता है कि नेमेटिक डोमेन दीवारें "उनके द्वारा खींचे गए प्रवाह द्वारा दृढ़ता से स्थिर हो जाती हैं," जिससे एक "स्थान-भरने वाला वृक्ष-जैसा पैटर्न" बनता है [चित्र 1(d)-1(f)]। यह अवरुद्ध अवस्था एक उपन्यास खोज है, जो अन्य विधियों द्वारा आमतौर पर देखी और अध्ययन की जाने वाली अराजक, दोष-युक्त अशांति से अलग है।
- उच्च-आयामी शोर और दीर्घकालिक स्थिरता को संभालना: अवरुद्ध व्यवस्था में "बहुत कमजोर" बड़े पैमाने पर अराजक प्रवाह और "बहुत लंबे सहसंबंध समय, विशेष रूप से बड़े पैमाने पर नेमेटिक टेंसर क्षेत्र के" होते हैं [चित्र 1(i), नीला]। यह स्थिर, दीर्घकालिक संरचनाओं और गतिकी को पकड़ने में गुणात्मक श्रेष्ठता का संकेत देता है, जो अक्सर दोष-युक्त प्रणालियों में उच्च-आयामी शोर और छोटे सहसंबंध समय से अभिभूत हो जाते हैं। मॉडल प्रभावी रूप से दोष गतिकी से "शोर" को कम करता है, जिससे पैटर्न निर्माण तंत्र स्पष्ट रूप से उभरता है।
- लक्षित व्यवस्था के लिए कम्प्यूटेशनल दक्षता: हालांकि एक प्राथमिक फोकस नहीं है, पत्र एक व्यावहारिक लाभ नोट करता है। अनुभाग V.A में क्यू-टेंसर मॉडल पर चर्चा करते समय, लेखक कहते हैं, "ध्यान दें कि क्यू-टेंसर सिमुलेशन इस सीमा [छोटे दोष कोर आकार] में तेजी से कठोर और कम्प्यूटेशनल रूप से महंगे हो जाते हैं, जिससे $\theta$ मॉडल एक अधिक कुशल और व्यावहारिक विकल्प बन जाता है।" दोष-मुक्त व्यवस्था (जो बहुत छोटे दोष कोर आकार के अनुरूप है) के लिए, निर्देशक-आधारित मॉडल कम्प्यूटेशनल लागत और स्थिरता में अत्यधिक श्रेष्ठ है, जिससे अवरुद्ध अवस्था के अधिक व्यापक सिमुलेशन की अनुमति मिलती है।
बाधाओं के साथ संरेखण
चुना गया निर्देशक-आधारित मॉडल टोपोलॉजिकल दोषों द्वारा पेश की जाने वाली जटिलताओं के बिना सक्रिय नेमेटिक अशांति का अध्ययन करने की अंतर्निहित बाधाओं के साथ पूरी तरह से संरेखित होता है। समस्या की कठोर आवश्यकताओं और समाधान के अद्वितीय गुणों के बीच "विवाह" कई तरीकों से स्पष्ट है:
- अनिवार्य दोष-मुक्त अवस्था: सबसे महत्वपूर्ण बाधा टोपोलॉजिकल दोषों की अनुपस्थिति है। मॉडल के सूत्रीकरण, निर्देशक क्षेत्र मापांक को $|n|=1$ पर निश्चित करके, स्वाभाविक रूप से दोष न्यूक्लियेशन को रोकता है [33,38]। यह एक प्रत्यक्ष और पूर्ण संरेखण है, यह सुनिश्चित करता है कि कोई भी देखी गई घटना केवल गतिविधि, प्रवाह संरेखण और नेमेटिक लोच के परस्पर क्रिया के कारण होती है, न कि दोष गतिकी के कारण।
- प्रवाह संरेखण पर ध्यान: पत्र का लक्ष्य यह जांचना है कि "प्रवाह-संरेखण पैरामीटर $\nu$" सक्रिय नेमेटिक अशांति को कैसे प्रभावित करता है। एरिकसेन-लेसली तरल क्रिस्टल मॉडल, जो उनके दृष्टिकोण का आधार बनता है, स्वाभाविक रूप से इस पैरामीटर को शामिल करता है, जिससे प्रवाह के स्थानिक-सामयिक संरचना और गतिकीय अवरोध के उद्भव पर इसके प्रभावों का प्रत्यक्ष अध्ययन संभव हो पाता है।
- स्पष्टता के लिए न्यूनतम दृष्टिकोण: दोष गतिकी की जटिलताओं को दूर करके, मॉडल एक न्यूनतम दृष्टिकोण का पालन करता है, जिससे पैटर्न निर्माण और अवरोध के अंतर्निहित तंत्रों की स्पष्ट पहचान संभव हो पाती है। यह एक शून्य-आधार पाठक को जटिल घटनाओं को सहज रूप से समझाने के लक्ष्य के साथ संरेखित होता है। मॉडल प्रणाली को सरल बनाता है ताकि दोषों की अनुपस्थिति में होने वाले मौलिक रूप से भिन्न व्यवहारों को उजागर किया जा सके।
विकल्पों का अस्वीकरण
यह पत्र स्पष्ट रूप से और अप्रत्यक्ष रूप से वैकल्पिक दृष्टिकोणों को अस्वीकार करता है, विशेष रूप से दोष-मुक्त सक्रिय नेमेटिक्स में उनके प्रारंभिक जांच के लिए प्राथमिक उपकरण के रूप में पूर्ण क्यू-टेंसर मॉडल। इस अस्वीकरण के पीछे का तर्क स्पष्ट और बहुआयामी है:
- कम्प्यूटेशनल लागत और कठोरता: जैसा कि अनुभाग V.A में उल्लेख किया गया है, जब दोष कोर आकार $\epsilon$ बहुत छोटा होता है (दोष-मुक्त सीमा के करीब), "क्यू-टेंसर सिमुलेशन तेजी से कठोर और कम्प्यूटेशनल रूप से महंगे हो जाते हैं।" उस व्यवस्था के लिए जहां दोष ऊर्जावान रूप से दबाए जाते हैं या अनुपस्थित होते हैं, निर्देशक-आधारित $\theta$ मॉडल एक "अधिक कुशल और व्यावहारिक विकल्प" है। इस विशिष्ट समस्या के लिए मुख्य दृष्टिकोण के रूप में क्यू-टेंसर मॉडल का उपयोग न करने का यह एक मजबूत व्यावहारिक कारण है।
- दोषों के भ्रमित करने वाले प्रभाव: प्राथमिक उद्देश्य "टोपोलॉजिकल दोषों की अनुपस्थिति में" घटनाओं का अध्ययन करना था। क्यू-टेंसर मॉडल, डिजाइन द्वारा, दोष न्यूक्लियेशन और गतिकी की अनुमति देते हैं। ऐसे मॉडल का उपयोग करने से जटिलता की एक अतिरिक्त परत पेश होगी, जिससे गतिकीय अवरोध की ओर ले जाने वाले विशिष्ट तंत्रों को दोष-मुक्त वातावरण में अलग करना मुश्किल हो जाएगा। लेखक स्पष्ट रूप से कहते हैं कि "सक्रिय नेमेटिक्स में अधिकांश प्रयोग और सिमुलेशन दोष-युक्त व्यवस्थाओं में किए गए हैं" (अनुभाग VII), जिसका अर्थ है कि ये पिछले दृष्टिकोण उनके उपन्यास दोष-मुक्त अध्ययन के लिए उपयुक्त नहीं थे।
- सत्यापन, प्रतिस्थापन नहीं: क्यू-टेंसर मॉडल को अनुभाग V में बाद में पेश किया गया है, प्रतिस्थापन के रूप में नहीं, बल्कि "उस व्यवस्था को स्पष्ट करने के लिए जिसमें हमारे दोष-मुक्त निष्कर्ष लागू रहते हैं, और (2) अधिक परिचित दोष-युक्त व्यवहार में संक्रमण का पता लगाने के लिए जो तब उत्पन्न होता है जब वे स्थितियां पूरी नहीं होती हैं।" यह दर्शाता है कि क्यू-टेंसर मॉडल उनके दोष-मुक्त निष्कर्षों को संदर्भित करने और संक्रमणों का पता लगाने के लिए एक मूल्यवान उपकरण के रूप में कार्य करता है, लेकिन यह स्वयं दोष-मुक्त अवरुद्ध अवस्था के प्रारंभिक, केंद्रित अध्ययन के लिए आदर्श उपकरण नहीं है। पत्र दिखाता है कि $\theta$ मॉडल उस सीमा में क्यू-टेंसर मॉडल के साथ अभिसरण करता है, जो इस विशिष्ट व्यवस्था के लिए सरल मॉडल की वैधता की पुष्टि करता है। दोषों के प्रभावों को अन्य मापदंडों से अलग करने की क्षमता पत्र के निष्कर्षों के लिए महत्वपूर्ण है।
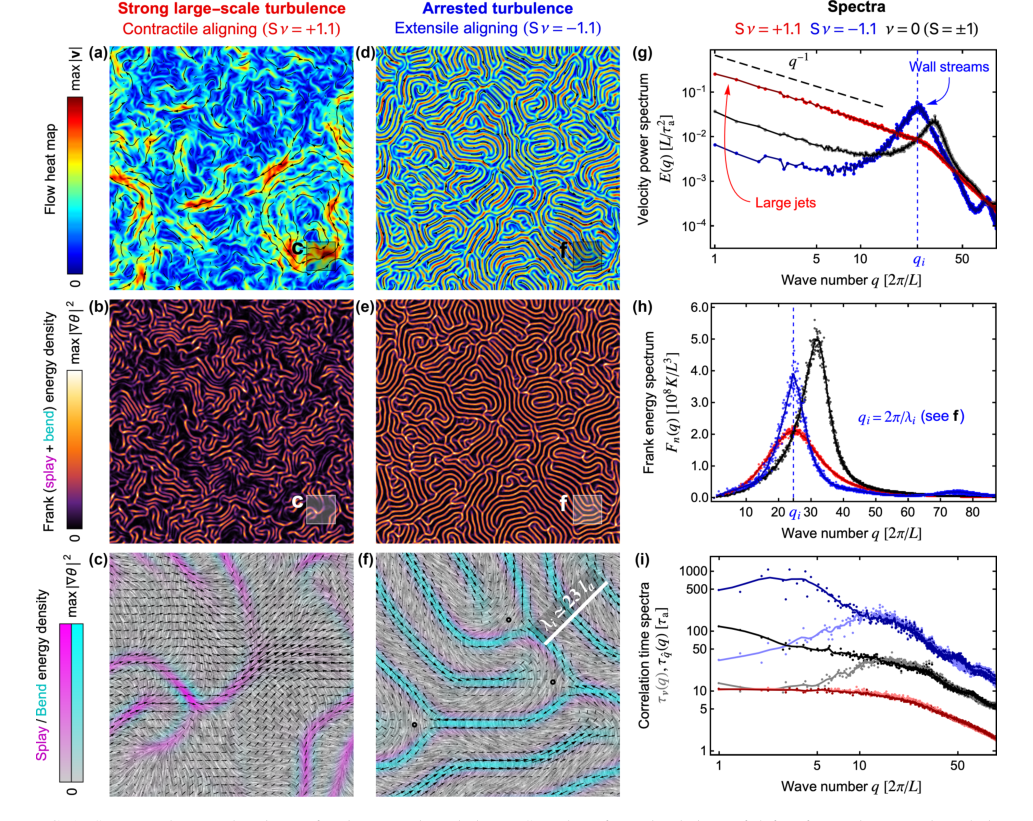 FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
गणितीय और तार्किक तंत्र
मास्टर समीकरण
सक्रिय नेमेटिक अशांति का मौलिक व्यवहार, विशेष रूप से इस पत्र में अध्ययन की गई दोष-मुक्त व्यवस्था में, द्रव प्रवाह और नेमेटिक तरल क्रिस्टल के अभिविन्यास के बीच परस्पर क्रिया द्वारा शासित होता है। इस परस्पर क्रिया को दो युग्मित आंशिक अंतर समीकरणों द्वारा पकड़ा जाता है: एक जो द्रव के संवेग संतुलन का वर्णन करता है, जो गैर-आयामीकरण और इसके कर्ल लेने के बाद, स्ट्रीम फ़ंक्शन के लिए एक पॉइसन समीकरण बन जाता है, और दूसरा जो नेमेटिक निर्देशक क्षेत्र की गतिकी का वर्णन करता है।
गैर-आयामी संवेग संतुलन समीकरण (लुप्त रेनॉल्ड्स संख्या पर नेवियर-स्टोक्स जैसे समीकरण के कर्ल से व्युत्पन्न) है:
$$
\nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) \quad \text{(6)}
$$
गैर-आयामी निर्देशक गतिकी समीकरण (यह वर्णन करता है कि समय के साथ नेमेटिक अभिविन्यास कैसे बदलता है) है:
$$
\partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi \quad \text{(8)}
$$
ये दो समीकरण, (6) और (8), दोष-मुक्त सक्रिय नेमेटिक मॉडल के गणितीय इंजन का निर्माण करते हैं। वे युग्मित हैं क्योंकि द्रव प्रवाह ( $\psi$ द्वारा दर्शाया गया) नेमेटिक निर्देशक ($\theta$) को प्रभावित करता है, और नेमेटिक निर्देशक की विन्यास द्रव प्रवाह को प्रभावित करती है।
पद-दर-पद विच्छेदन
आइए इन मास्टर समीकरणों के प्रत्येक घटक को उनके गणितीय अर्थ और भौतिक भूमिका को समझने के लिए विच्छेदित करें।
समीकरण (6): संवेग संतुलन
$$ \nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) $$
-
$\nabla^4\psi$:
- गणितीय परिभाषा: यह स्ट्रीम फ़ंक्शन $\psi$ पर कार्य करने वाला बायहार्मोनिक ऑपरेटर है। यह $\nabla^2(\nabla^2\psi)$ के बराबर है। चूंकि $\omega = -\nabla^2\psi$ (वर्टिसिटी), यह पद प्रभावी रूप से $-\nabla^2\omega$ है।
- भौतिक/तार्किक भूमिका: द्रव गतिकी में, यह पद वर्टिसिटी के चिपचिपे क्षय का प्रतिनिधित्व करता है। यह एक अवमंदन तंत्र के रूप में कार्य करता है, द्रव प्रवाह में परिवर्तन का विरोध करता है और वेग ग्रेडिएंट्स को चिकना करता है। $\nabla^4$ (सिर्फ $\nabla^2$ के बजाय) का उपयोग स्ट्रीम फ़ंक्शन के संदर्भ में सब कुछ व्यक्त करते समय दबाव को खत्म करने के लिए संवेग संतुलन समीकरण के कर्ल को दो बार लेने से उत्पन्न होता है।
- $\nabla^4$ क्यों: यह ऑपरेटर स्ट्रीम फ़ंक्शन के संदर्भ में व्यक्त स्टोक्स समीकरण (कम रेनॉल्ड्स संख्या पर संवेग संतुलन) के कर्ल को लेने से स्वाभाविक रूप से उत्पन्न होता है। यह सुनिश्चित करता है कि द्रव प्रवाह असंपीड्य रहे और चिपचिपे बलों को ध्यान में रखे।
-
$S$:
- गणितीय परिभाषा: एक आयामहीन पैरामीटर, $S = \text{sign}(\zeta)$, जहां $\zeta$ सक्रिय तनाव पैरामीटर है।
- भौतिक/तार्किक भूमिका: यह पैरामीटर सक्रिय तनाव की प्रकृति को निर्धारित करता है। $S = +1$ विस्तारशील तनावों के लिए (जैसे, छड़-जैसे घटक बाहर की ओर धकेलते हैं) और $S = -1$ संकुचित तनावों के लिए (जैसे, मोटर प्रोटीन अंदर की ओर खींचते हैं)। यह प्रणाली के व्यवहार के लिए एक प्रमुख नियंत्रण पैरामीटर है, जो यह प्रभावित करता है कि क्या प्रणाली मजबूत अशांति या गतिकीय अवरोध प्रदर्शित करती है।
- एक चिन्ह क्यों: चिन्ह सक्रिय घटकों द्वारा उत्पन्न तनाव के मौलिक अंतर को दर्शाता है, जिसके परिणामी प्रवाह पैटर्न पर गहरा प्रभाव पड़ता है।
-
$\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$:
- गणितीय परिभाषा: यह नेमेटिक अभिविन्यास टेंसर $\tilde{g}_{\alpha\beta}$ का विचलन है। टेंसर $\tilde{g}_{\alpha\beta}$ को $\tilde{g}_{\alpha\beta} = n_\alpha n_\beta - \frac{1}{2}\delta_{\alpha\beta}$ के रूप में परिभाषित किया गया है, जहां $n_\alpha$ नेमेटिक निर्देशक $\mathbf{n} = (\cos\theta, \sin\theta)$ का एक घटक है, और $\delta_{\alpha\beta}$ क्रोनकर डेल्टा है।
- भौतिक/तार्किक भूमिका: यह पद नेमेटिक घटकों द्वारा उत्पन्न सक्रिय तनाव का प्रतिनिधित्व करता है। सक्रिय नेमेटिक्स आंतरिक रूप से रासायनिक ऊर्जा को यांत्रिक कार्य में परिवर्तित करते हैं, जिससे द्रव प्रवाह को चलाने वाले तनाव उत्पन्न होते हैं। $\tilde{g}_{\alpha\beta}$ का विचलन इन तनावों को कैसे वितरित किया जाता है और वे द्रव गति को कैसे चलाते हैं, इसे पकड़ता है।
- विचलन क्यों: एक तनाव टेंसर (जैसे $\sigma^A$) का विचलन उस तनाव द्वारा द्रव पर लगाए गए बल घनत्व का प्रतिनिधित्व करता है। यह द्रव संवेग को युग्मित करने का एक मानक तरीका है।
-
$R$:
- गणितीय परिभाषा: आयामहीन चिपचिपाहट अनुपात, $R = \gamma/\eta$.
- भौतिक/तार्किक भूमिका: यह पैरामीटर नेमेटिक निर्देशक की घूर्णी चिपचिपाहट ($\gamma$) की तुलना द्रव की अपरूपण चिपचिपाहट ($\eta$) से करता है। यह प्रभावित करता है कि नेमेटिक निर्देशक प्रवाह और लोचदार टॉर्क के जवाब में कितनी आसानी से पुन: उन्मुख होता है।
- एक अनुपात क्यों: यह दो अलग-अलग प्रकार के चिपचिपे प्रतिरोधों की तुलना करता है, जो निर्देशक घूर्णन और द्रव प्रवाह के बीच संतुलन को समझने के लिए महत्वपूर्ण है।
-
$\nu$:
- गणितीय परिभाषा: आयामहीन प्रवाह-संरेखण पैरामीटर।
- भौतिक/तार्किक भूमिका: यह पैरामीटर तरल क्रिस्टल निर्देशक की अपरूपण प्रवाह के तहत पुन: उन्मुख होने की प्रवृत्ति को दर्शाता है। यदि $\nu < 0$, तो नेमेटिक प्रवाह के साथ संरेखित होने की प्रवृत्ति रखता है (प्रवाह-संरेखण व्यवस्था)। यदि $\nu > 0$, तो यह लुढ़कने की प्रवृत्ति रखता है (लुढ़कने वाली व्यवस्था)। यह पैरामीटर गतिकीय अवरोध पर पत्र के निष्कर्षों के लिए केंद्रीय है।
- एक गुणांक क्यों: यह एक गुणांक है जो प्रवाह-संरेखण प्रभाव की शक्ति को मापता है, जो तरल क्रिस्टल का एक प्रमुख भौतिक गुण है।
-
$\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp)$:
- गणितीय परिभाषा: यह पद प्रवाह संरेखण और एरिकसेन तनावों से उत्पन्न तनावों के विचलन का प्रतिनिधित्व करता है। $h_\parallel$ और $h_\perp$ ओरिएंटेशनल फ़ील्ड $h_\alpha$ के घटक हैं, जिन्हें समीकरण (7) में $h_\parallel = \frac{1}{A}\nabla^2\theta$ और $h_\perp = \nu(\sin 2\theta d_1\psi + \cos 2\theta d_2\psi)$ के रूप में परिभाषित किया गया है, जहां $d_1 = \frac{1}{2}(\partial_x^2 - \partial_y^2)$ और $d_2 = \partial_x\partial_y$ है। पूर्ण $h_\alpha$ निर्देशक पर लोचदार टॉर्क है।
- भौतिक/तार्किक भूमिका: यह पद लोचदार तनावों (एरिकसेन तनाव) और प्रवाह संरेखण के कारण होने वाले तनावों को दर्शाता है। लोचदार तनाव नेमेटिक निर्देशक क्षेत्र में विकृतियों से उत्पन्न होते हैं, जबकि प्रवाह संरेखण वर्णन करता है कि नेमेटिक निर्देशक द्रव के विस्तारशील प्रवाह के जवाब में कैसे पुन: उन्मुख होता है। ये तनाव द्रव संवेग संतुलन में वापस फीड करते हैं, जिससे प्रवाह क्षेत्र प्रभावित होता है।
- अंतर क्यों: $\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp$ का विशिष्ट संयोजन सममित भाग से उत्पन्न होता है (समीकरण 4), जिसमें लोचदार टॉर्क और प्रवाह संरेखण से योगदान शामिल है। इस टेंसर का विचलन द्रव पर बल घनत्व का प्रतिनिधित्व करता है।
समीकरण (8): निर्देशक गतिकी
$$ \partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi $$
-
$\partial_t\theta$:
- गणितीय परिभाषा: समय $t$ के संबंध में नेमेटिक कोण $\theta$ का आंशिक व्युत्पन्न।
- भौतिक/तार्किक भूमिका: यह समय विकास पद है, जो दर्शाता है कि अंतरिक्ष में एक निश्चित बिंदु पर नेमेटिक निर्देशक का अभिविन्यास कितनी जल्दी बदलता है। यह गतिकी का मूल है।
- व्युत्पन्न क्यों: यह किसी भी गतिशील समीकरण का एक मौलिक घटक है, जो एक स्थिति चर के परिवर्तन की दर का वर्णन करता है।
-
$\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$:
- गणितीय परिभाषा: यह संवहनी पद है, जो द्रव प्रवाह द्वारा नेमेटिक कोण $\theta$ के संवहन का प्रतिनिधित्व करता है। $\epsilon_{\alpha\beta}$ लेवी-सिविटा (पूरी तरह से प्रतिसममित) टेंसर है, और $\partial_\alpha\psi$ द्रव वेग $\mathbf{v}$ के घटकों का प्रतिनिधित्व करता है।
- भौतिक/तार्किक भूमिका: यह पद वर्णन करता है कि नेमेटिक निर्देशक को द्रव प्रवाह द्वारा कैसे ले जाया जाता है। यदि कोई द्रव तत्व चलता है, तो वह अपने नेमेटिक अभिविन्यास को अपने साथ ले जाता है। यह एक महत्वपूर्ण अरैखिक पद है जो निर्देशक गतिकी को द्रव वेग से जोड़ता है।
- $\epsilon_{\alpha\beta}$ और गुणन क्यों: लेवी-सिविटा टेंसर का उपयोग स्ट्रीम फ़ंक्शन के कर्ल को बनाने के लिए किया जाता है, जो वेग घटकों को देता है। पद $\mathbf{v} \cdot \nabla\theta$ सामग्री व्युत्पन्न का प्रतिनिधित्व करता है, जो स्थानीय समय विकास और प्रवाह द्वारा परिवहन दोनों के कारण होने वाले परिवर्तनों को दर्शाता है।
-
$\frac{1}{A}\nabla^2\theta$:
- गणितीय परिभाषा: नेमेटिक कोण $\theta$ का लाप्लासियन, गतिविधि संख्या $A$ के व्युत्क्रम द्वारा मापा जाता है।
- भौतिक/तार्किक भूमिका: यह पद लोचदार टॉर्क का प्रतिनिधित्व करता है जो नेमेटिक निर्देशक क्षेत्र में स्थानिक भिन्नताओं (विकृतियों) का विरोध करता है। यह अभिविन्यास में तेज परिवर्तनों को चिकना करने की कोशिश करता है, एक पुनर्स्थापना बल की तरह कार्य करता है। गतिविधि संख्या $A = L^2/l_a^2$ सिस्टम आकार $L$ की तुलना सक्रिय लंबाई $l_a = \sqrt{K/(|\zeta|R)}$ से करता है, जो सक्रिय और लोचदार नेमेटिक तनावों के बीच संतुलन है। एक बड़ा $A$ लोचदार प्रतिरोध की तुलना में मजबूत सक्रिय बल का संकेत देता है।
- $\nabla^2$ क्यों: लाप्लासियन एक गणितीय ऑपरेटर है जो प्रसार या लोचदार बलों के लिए उपयोग किया जाता है जो स्थानिक ग्रेडिएंट्स को कम करने की प्रवृत्ति रखते हैं।
-
$h_\parallel$:
- गणितीय परिभाषा: ओरिएंटेशनल फ़ील्ड $h_\alpha$ का समानांतर घटक, जो फ्रैंक मुक्त ऊर्जा से संबंधित है। विशेष रूप से, $h_\parallel = \frac{1}{A}\nabla^2\theta$ (समीकरण (7) और (8) के संदर्भ से)।
- भौतिक/तार्किक भूमिका: यह पद निर्देशक पर कार्य करने वाले लोचदार टॉर्क का प्रतिनिधित्व करता है, जो इसे न्यूनतम लोचदार विकृति की स्थिति की ओर ले जाता है। यह एलएचएस पर $\frac{1}{A}\nabla^2\theta$ पद के समान लोचदार पुनर्स्थापना बल है, लेकिन यहां इसे स्पष्ट रूप से एक स्रोत पद के रूप में दिखाया गया है। (8) में पत्र का सूत्रीकरण प्रभावी रूप से लोचदार टॉर्क पदों को जोड़ता है।
- जोड़ क्यों: आरएचएस पर पद घूर्णन के स्रोत या सिंक हैं, जो $\theta$ के समग्र परिवर्तन में योगदान करते हैं।
-
$\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$:
- गणितीय परिभाषा: प्रवाह-संरेखण पद, प्रवाह-संरेखण पैरामीटर $\nu$ और नेमेटिक अभिविन्यास टेंसर $\tilde{g}_{\alpha\beta}$ और स्ट्रीम फ़ंक्शन $\psi$ के दूसरे डेरिवेटिव्स से जुड़े।
- भौतिक/तार्किक भूमिका: यह पद विस्तारशील प्रवाह (अपरूपण) के कारण नेमेटिक निर्देशक के पुन: अभिविन्यास का वर्णन करता है। यह दर्शाता है कि द्रव के विरूपण क्षेत्र ( $\partial_\alpha\partial_\beta\psi$ से संबंधित) नेमेटिक छड़ों को संरेखित या लुढ़कने का कारण कैसे बनते हैं, जो $\nu$ के चिन्ह पर निर्भर करता है। यह एक महत्वपूर्ण युग्मन पद है।
- गुणा क्यों: यह प्रवाह-संरेखण पैरामीटर, नेमेटिक अभिविन्यास और स्ट्रेन-रेट टेंसर ( $\partial_\alpha\partial_\beta\psi$ से व्युत्पन्न) के उत्पाद का एक उत्पाद है, जो दर्शाता है कि ये कारक पुन: उन्मुख टॉर्क उत्पन्न करने के लिए कैसे संयुक्त होते हैं।
प्रमुख आयामहीन पैरामीटर:
- $L$: सिस्टम आकार (लंबाई पैमाना)।
- $\tau_a = \eta/|\zeta|$: सक्रिय समय पैमाना।
- $K$: फ्रैंक लोचदार स्थिरांक।
- $\eta$: अपरूपण चिपचिपाहट।
- $\gamma$: घूर्णी चिपचिपाहट।
- $\zeta$: सक्रिय तनाव पैरामीटर।
- $A = L^2/l_a^2 = RL^2|\zeta|/K$: गतिविधि संख्या। सिस्टम आकार की तुलना सक्रिय लंबाई $l_a$ से करता है। एक बड़ा $A$ लोचदार प्रतिरोध की तुलना में मजबूत सक्रिय बल का संकेत देता है।
- $R = \gamma/\eta$: चिपचिपाहट अनुपात।
- $\nu$: प्रवाह-संरेखण पैरामीटर।
चरण-दर-चरण प्रवाह
एक विशेष स्थान और समय पर सक्रिय नेमेटिक प्रणाली की स्थिति का प्रतिनिधित्व करने वाले एक एकल, अमूर्त डेटा बिंदु की कल्पना करें। यह स्थिति मुख्य रूप से स्थानीय नेमेटिक निर्देशक कोण $\theta$ और द्रव स्ट्रीम फ़ंक्शन $\psi$ द्वारा परिभाषित की जाती है। यह प्रणाली एक यांत्रिक असेंबली लाइन की तरह, इन डेटा बिंदुओं को संसाधित करने वाले एक संख्यात्मक सिमुलेशन के माध्यम से पुनरावृत्त रूप से विकसित होती है।
-
प्रारंभिक स्थिति इनपुट: एक दिए गए समय चरण $n$ पर, हमारे पास पूरे स्थानिक ग्रिड में वर्तमान नेमेटिक कोण क्षेत्र $\theta^n$ और स्ट्रीम फ़ंक्शन क्षेत्र $\psi^n$ है।
-
संवेग संतुलन गणना (समीकरण 6 / A1):
- सिस्टम पहले द्रव प्रवाह को अद्यतन करने पर ध्यान केंद्रित करता है। यह वर्तमान नेमेटिक कोण $\theta^n$ लेता है और सक्रिय तनावों ( $S(d_1 \sin 2\theta^n + d_2 \cos 2\theta^n)$ पद) और प्रवाह-संरेखण/एरिकसेन तनावों ( $-\frac{R\nu}{A}(d_1 \cos 2\theta^n \nabla^2\theta^n - d_2 \sin 2\theta^n \nabla^2\theta^n)$ पद, जो (A1) के आरएचएस का हिस्सा है) की गणना के लिए इसका उपयोग करता है। ये पद "बल लगाने वाले कार्य" के रूप में कार्य करते हैं जो द्रव को चलाते हैं।
- ये बल लगाने वाले कार्य फिर संवेग संतुलन समीकरण में फ़ीड किए जाते हैं, जो $\psi$ के लिए एक बायहार्मोनिक समीकरण है। इस समीकरण को छद्म-स्पेक्ट्रल विधि का उपयोग करके हल किया जाता है। इसका मतलब है कि स्थानिक डेरिवेटिव को फूरियर स्पेस में बहुत कुशलता से गणना की जाती है।
- महत्वपूर्ण रूप से, $\psi$ पर निर्भरता के कारण (A1) के एलएचएस पर $G(\theta^n, \psi^n)$ पद (जो प्रवाह-संरेखण तनाव का हिस्सा है)। इसे संभालने के लिए, एक निश्चित-बिंदु पुनरावृति का उपयोग किया जाता है: $\psi$ के लिए एक प्रारंभिक अनुमान (अक्सर पिछले समय चरण से) का उपयोग $G$ की गणना के लिए किया जाता है, फिर एक नया $\psi$ हल किया जाता है। यह प्रक्रिया तब तक दोहराई जाती है जब तक कि गणना की गई $\psi$ वर्तमान समय चरण के लिए एक स्थिर मान में परिवर्तित न हो जाए, जिससे तात्कालिक रूप से उत्पन्न तनावों के बीच प्रवाह की आत्म-संगति सुनिश्चित हो सके।
- एक बार $\psi^n$ निर्धारित हो जाने के बाद, वेग घटकों ($v_x, v_y$), वर्टिसिटी ($\omega$), और प्रवाह-संरेखण घूर्णन ($C^n$) जैसे सहायक प्रवाह क्षेत्रों की गणना $\psi^n$ से की जाती है।
-
निर्देशक गतिकी गणना (समीकरण 8 / A4):
- इसके बाद, सिस्टम नेमेटिक निर्देशक को अद्यतन करने की ओर मुड़ता है। यह नव-गणना किए गए प्रवाह क्षेत्रों ($v_x, v_y$) और वर्तमान नेमेटिक कोण $\theta^n$ लेता है।
- निर्देशक गतिकी समीकरण (8) का वर्णन करता है कि $\theta$ कैसे बदलता है। संवहनी पद ($\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$) निर्देशित करता है कि निर्देशक को द्रव प्रवाह द्वारा कैसे संवहित किया जाता है। लोचदार पद ($\frac{1}{A}\nabla^2\theta$) निर्देशक विकृतियों को चिकना करने का कार्य करता है। आरएचएस पद ($h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$) लोचदार टॉर्क और विस्तारशील प्रवाह के कारण पुन: अभिविन्यास का प्रतिनिधित्व करते हैं।
- इस समीकरण को परिमित-तत्व विधि का उपयोग करके हल किया जाता है। संवहनी पद को विशेषताओं-गैलेरकिन विधि का उपयोग करके अलग से संभाला जाता है ताकि स्थिरता सुनिश्चित हो सके, प्रभावी रूप से द्रव तत्वों के पथ का पता लगाया जा सके। लोचदार (लाप्लासियन) पद को अंतर्निहित रूप से संभाला जाता है, जिसका अर्थ है कि इसे संख्यात्मक स्थिरता सुनिश्चित करने के लिए, विशेष रूप से कठोर समस्याओं के लिए, नए $\theta^{n+1}$ के साथ एक साथ हल किया जाता है।
- परिणाम अद्यतन नेमेटिक कोण क्षेत्र $\theta^{n+1}$ है।
-
समय चरण बढ़ाएँ: सिस्टम फिर समय को $n$ से $n+1$ तक बढ़ाता है, और पूरी प्रक्रिया दोहराई जाती है, $\theta^{n+1}$ और $\psi^{n+1}$ को नए इनपुट के रूप में उपयोग किया जाता है।
यह पुनरावृत्त, युग्मित प्रक्रिया प्रणाली को विकसित करने की अनुमति देती है, जिसमें द्रव प्रवाह और नेमेटिक अभिविन्यास लगातार एक-दूसरे को प्रभावित करते हैं, जिससे सक्रिय अशांति या अवरुद्ध पैटर्न जैसी जटिल पैटर्न और गतिकीय अवस्थाएं उत्पन्न होती हैं।
अनुकूलन गतिकी
इस संदर्भ में "अनुकूलन गतिकी" एक पारंपरिक मशीन लर्निंग अनुकूलन (जैसे ग्रेडिएंट डिसेंट एक हानि फ़ंक्शन को कम करना) के बजाय संख्यात्मक समाधान और प्रणाली के दीर्घकालिक भौतिक विकास को एक स्थिर या अर्ध-स्थिर स्थिति की ओर संदर्भित करता है।
-
प्रत्येक समय चरण पर संख्यात्मक अभिसरण:
- स्ट्रीम फ़ंक्शन के लिए निश्चित-बिंदु पुनरावृति: प्रत्येक समय चरण के भीतर, स्ट्रीम फ़ंक्शन $\psi$ के लिए संवेग संतुलन समीकरण (A1) को निश्चित-बिंदु विधि का उपयोग करके पुनरावृत्त रूप से हल किया जाता है। इसका मतलब है कि $\psi$ के लिए एक प्रारंभिक अनुमान का उपयोग अरैखिक शब्दों की गणना के लिए किया जाता है, फिर एक नया $\psi$ गणना की जाती है। यह नया $\psi$ फिर अगली पुनरावृति के लिए इनपुट बन जाता है, और प्रक्रिया तब तक दोहराई जाती है जब तक कि क्रमिक $\psi$ समाधानों के बीच का अंतर एक छोटी कम्प्यूटेशनल सहनशीलता (जैसे, $10^{-8}$) से नीचे न गिर जाए। यह सुनिश्चित करता है कि द्रव प्रवाह क्षेत्र उस क्षण में नेमेटिक निर्देशक द्वारा उत्पन्न तनावों के साथ आत्म-सुसंगत है। यहां "हानि परिदृश्य" समीकरण की अवशिष्ट त्रुटि है, और पुनरावृति इसके "न्यूनतम" (शून्य अवशिष्ट) को खोजने का लक्ष्य रखती है।
- निर्देशक गतिकी के लिए अंतर्निहित उपचार: निर्देशक गतिकी समीकरण (A4) के लिए, लाप्लासियन (लोचदार) पद को अंतर्निहित रूप से संभाला जाता है। इसका मतलब है कि अगले समय चरण, $\theta^{n+1}$ पर $\theta$ के मान को सीधे हल किया जाता है, न कि $\theta^n$ से स्पष्ट रूप से गणना की जाती है। यह दृष्टिकोण संख्यात्मक स्थिरता को बढ़ाता है, विशेष रूप से कठोर शब्दों से निपटते समय (जैसे लोचदार बल जो सावधानी से संभाले न जाने पर तेजी से परिवर्तन का कारण बन सकते हैं)। यह प्रभावी रूप से एक स्थिर $\theta^{n+1}$ में "अभिसरण" करता है जो वर्तमान प्रवाह को देखते हुए समीकरण को संतुष्ट करता है।
-
भौतिक प्रणाली विकास और "सीखना":
- पुनरावृत्त स्थिति अद्यतन: पूरी सिमुलेशन एक समय चरण से दूसरे समय चरण तक क्षेत्रों $\theta$ और $\psi$ को पुनरावृत्त रूप से अद्यतन करके आगे बढ़ती है। द्रव प्रवाह और निर्देशक गतिकी के बीच यह निरंतर प्रतिक्रिया लूप प्रणाली के विकास को चलाता है।
- हानि परिदृश्य (अंतर्निहित): हालांकि स्पष्ट रूप से एक हानि फ़ंक्शन के रूप में परिभाषित नहीं किया गया है, प्रणाली की गतिकी को एक जटिल "ऊर्जा परिदृश्य" (जैसे, फ्रैंक मुक्त ऊर्जा, थोक मुक्त ऊर्जा) को नेविगेट करने के रूप में सोचा जा सकता है। प्रणाली स्वाभाविक रूप से इन ऊर्जाओं को कम करने वाली अवस्थाओं की ओर विकसित होती है या, सक्रिय प्रणालियों में, गतिशील रूप से बनाए गए गैर-संतुलन अवस्थाओं तक पहुंचती है।
- ग्रेडिएंट्स और ड्राइविंग बल: समीकरणों में विभिन्न पद "ग्रेडिएंट्स" या ड्राइविंग बलों के रूप में कार्य करते हैं। उदाहरण के लिए, सक्रिय तनाव पद ($S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$) द्रव गति को चलाता है, जबकि लोचदार पद ($\nabla^2\psi$ और $\nabla^2\theta$) पुनर्स्थापना बल के रूप में कार्य करते हैं, जो विकृतियों को चिकना करने की कोशिश करते हैं। प्रवाह-संरेखण पद ($\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$) निर्देशित करता है कि निर्देशक प्रवाह के जवाब में कैसे पुन: उन्मुख होता है, जिससे प्रणाली की प्रतिक्रिया आकार लेती है।
- गतिकीय अवरोध में अभिसरण: पत्र का केंद्रीय निष्कर्ष यह है कि, विशिष्ट पैरामीटर व्यवस्थाओं (जैसे, विस्तारशील संरेखण नेमेटिक्स $S\nu < -1$ के साथ) के लिए, प्रणाली एक गतिकीय रूप से अवरुद्ध अवस्था में "अभिसरण" करती है। यह एक वैश्विक न्यूनतम खोजने के अर्थ में एक अनुकूलन नहीं है, बल्कि प्रणाली एक स्थिर, गैर-संतुलन पैटर्न (वृक्ष-जैसे डोमेन दीवार नेटवर्क) में बस जाती है जहां अराजक प्रवाह दबाए जाते हैं, और गतिकी बहुत धीमी हो जाती है, जो कांच जैसी प्रणालियों में उम्र बढ़ने की घटनाओं की तरह होती है। प्रणाली सक्रिय बल, चिपचिपे क्षय, लोचदार टॉर्क और प्रवाह संरेखण की निरंतर परस्पर क्रिया के माध्यम से इन स्थिर पैटर्न को बनाने के लिए "सीखती है"। "ग्रेडिएंट्स" प्रभावी रूप से प्रणाली को इन अवरुद्ध विन्यासों में निर्देशित करते हैं।
- शोर की भूमिका: पूर्ण विकसित सक्रिय अशांति की ओर विकास को तेज करने के लिए निर्देशक गतिकी (परिशिष्ट A.4) में छोटे-आयाम वाले गॉसियन सफेद शोर को जोड़ा जाता है। यह शोर एक उपद्रव के रूप में कार्य करता है, जिससे प्रणाली को "परिदृश्य" का पता लगाने और संभावित स्थानीय न्यूनतम या मेटास्टेबल अवस्थाओं से बचने में मदद मिलती है, जिससे यह सुनिश्चित होता है कि यह विशिष्ट अशांत या अवरुद्ध व्यवस्थाओं तक पहुंचती है।
संक्षेप में, "अनुकूलन" सक्रिय बलों द्वारा संचालित और भौतिक गुणों द्वारा बाधित इन शासी समीकरणों के तहत विकसित होने वाली भौतिक प्रणाली की प्राकृतिक प्रवृत्ति है, जब तक कि यह एक विशिष्ट गतिशील या अवरुद्ध अवस्था तक नहीं पहुंच जाती। संख्यात्मक विधियाँ यह सुनिश्चित करती हैं कि इस विकास को सटीक और स्थिर रूप से अनुकरण किया जाए।
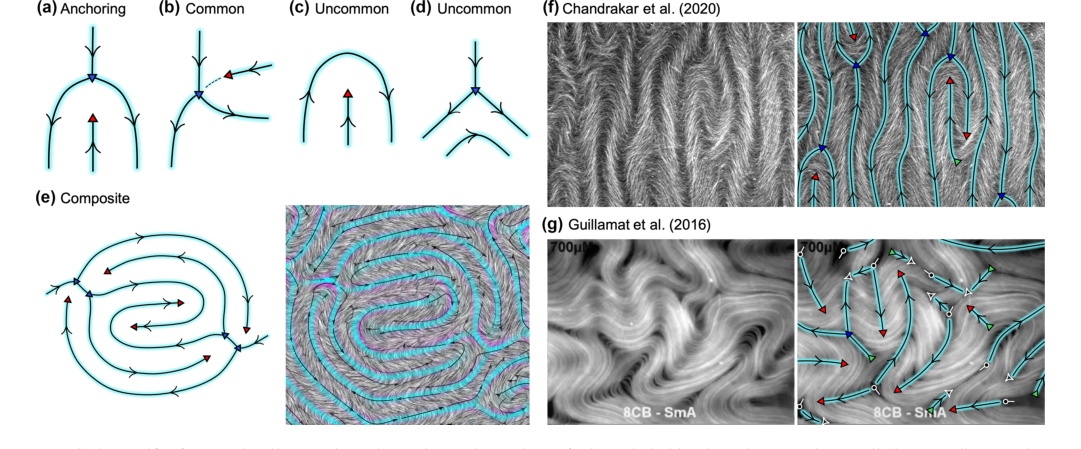 FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
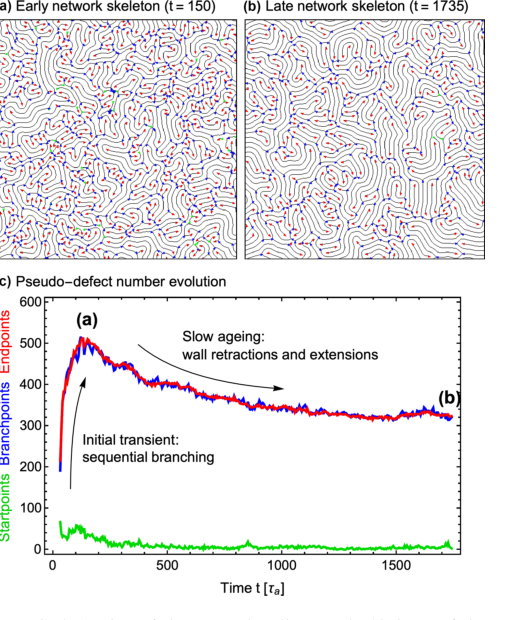 FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
परिणाम, सीमाएँ और निष्कर्ष
प्रायोगिक डिजाइन और आधार रेखाएँ
लेखकों ने सक्रिय नेमेटिक अशांति की गतिकी की कठोरता से जांच करने के लिए अपने संख्यात्मक प्रयोगों को सावधानीपूर्वक डिजाइन किया, विशेष रूप से टोपोलॉजिकल दोषों और प्रवाह संरेखण की भूमिका पर ध्यान केंद्रित किया। उनका प्राथमिक उपकरण बड़े पैमाने पर संख्यात्मक सिमुलेशन था, जिसमें दो मुख्य मॉडल का उपयोग किया गया था:
सबसे पहले, एक निर्देशक-आधारित दोष-मुक्त मॉडल का उपयोग किया गया था, जिसने प्रवाह संरेखण और एरिकसेन तनाव को शामिल करके पिछले कार्यों को सामान्यीकृत किया। यह मॉडल, समीकरण (6)–(8) द्वारा शासित, एक निश्चित मापांक के साथ एक निरंतर निर्देशक क्षेत्र को लागू करके स्वाभाविक रूप से टोपोलॉजिकल दोषों के निर्माण को रोकता है। यह वास्तुशिल्प विकल्प दोषों के भ्रमित करने वाले प्रभाव के बिना डोमेन दीवारों की गतिकी को अलग करने के लिए महत्वपूर्ण था। इस मॉडल में प्रमुख आयामहीन पैरामीटर गतिविधि संख्या $A = L^2/l_a^2$, चिपचिपाहट अनुपात $R = \gamma/\eta$, और प्रवाह-संरेखण पैरामीटर $\nu$ थे। अधिकांश सिमुलेशन के लिए, $R=1$ और $A=3.2 \times 10^5$ सेट किए गए थे, एक व्यवस्था जो $\nu=0$ होने पर बड़े पैमाने पर सक्रिय अशांति प्रदर्शित करने के लिए जानी जाती है। प्रयोगों को विशेष रूप से दो अलग-अलग व्यवस्थाओं की तुलना करने के लिए संरचित किया गया था:
1. संकुचित प्रवाह-संरेखण (Sv > 1), $S=-1$ (संकुचित तनाव) और $\nu=-1.1$ (प्रवाह-संरेखण छड़) द्वारा उदाहरण दिया गया। इसने "मजबूत बड़े पैमाने पर अशांति" के लिए एक आधार रेखा के रूप में कार्य किया।
2. विस्तारशील प्रवाह-संरेखण (Sv < -1), $S=+1$ (विस्तारशील तनाव) और $\nu=-1.1$ के साथ। इस व्यवस्था को "अवरुद्ध अशांति" प्रदर्शित करने का अनुमान लगाया गया था।
एक संदर्भ मामला जिसमें $\nu=0$ (गैर-संरेखण) शामिल था, जहां संकुचित और विस्तारशील तनाव घूर्णन तक समतुल्य होते हैं, तुलना के लिए एक तटस्थ आधार रेखा प्रदान की गई थी।
दूसरे, एक अनियंत्रित क्यू-टेंसर मॉडल का उपयोग उनके निष्कर्षों के संदर्भ को व्यापक बनाने और दोष-युक्त गतिकी में संक्रमण का पता लगाने के लिए किया गया था। यह मॉडल, बर्िस-एडवर्ड्स मॉडल (परिशिष्ट डी में विस्तृत) के लैंडौ-डी गेन्स ढांचे पर आधारित है, जिसने स्पष्ट रूप से वास्तविक $\pm 1/2$ टोपोलॉजिकल दोषों के न्यूक्लियेशन की अनुमति दी। यहां एक महत्वपूर्ण नियंत्रण पैरामीटर दोष कोर आकार $\epsilon$ और सक्रिय लंबाई $l_a$ का अनुपात था। इस मॉडल के साथ सिमुलेशन में $R=1$, $S=1$, $A=10000$, और $\nu=-1$ का उपयोग किया गया, जो एक छोटे कोणीय गड़बड़ी के साथ एक शांत नेमेटिक अवस्था से शुरू हुआ।
संख्यात्मक एकीकरण एक हाइब्रिड योजना पर निर्भर करता था, जो संवेग संतुलन (समीकरण 6) के लिए एक छद्म-स्पेक्ट्रल विधि को कोण क्षेत्र विकास (समीकरण 8) के लिए एक परिमित-तत्व विधि के साथ जोड़ता था, जैसा कि परिशिष्ट ए में वर्णित है। पूर्ण सक्रिय अशांति में विकास को तेज करने के लिए छोटे-आयाम वाले गॉसियन सफेद शोर को पेश किया गया था। लेखकों द्वारा अलग करने या हराने की मांग की गई "पीड़ित" (आधार रेखा मॉडल) मुख्य रूप से $\nu=0$ गैर-संरेखण मामला और संकुचित प्रवाह-संरेखण व्यवस्था में देखी गई मजबूत बड़े पैमाने पर अशांति थी। क्यू-टेंसर मॉडल ने दोष-मुक्त मॉडल की भविष्यवाणियों की मजबूती के लिए एक कठोर परीक्षण के रूप में भी कार्य किया।
जो साक्ष्य साबित करता है
इस पत्र में प्रस्तुत साक्ष्य निश्चित रूप से साबित करते हैं कि दोष-मुक्त सक्रिय नेमेटिक अशांति एक आश्चर्यजनक गतिकीय अवरोध से गुजर सकती है, जो नेमेटिक डोमेन दीवारों के एक स्थिर, वृक्ष-जैसे नेटवर्क के उद्भव की विशेषता है जो सुसंगत प्रवाह को चैनल करता है और अराजक गति को दबाता है।
गतिकीय अवरोध का मुख्य तंत्र विस्तारशील प्रवाह-संरेखण व्यवस्था (Sv < -1) की तुलना संकुचित प्रवाह-संरेखण व्यवस्था (Sv > 1) और $\nu=0$ संदर्भ मामले से करके क्रूरतापूर्वक साबित किया गया था। संकुचित संरेखण व्यवस्था में, सिमुलेशन (चित्र 1a-1c, मूवी S1) ने बड़े पैमाने पर जेट और खंडित, गतिशील रूप से पुनर्गठित नेमेटिक डोमेन दीवारों के साथ अत्यधिक अराजक प्रवाह दिखाया। इसने "मजबूत बड़े पैमाने पर अशांति" की आधार रेखा का प्रतिनिधित्व किया। इसके विपरीत, विस्तारशील संरेखण व्यवस्था (चित्र 1d-1f, मूवी S2) ने काफी कमजोर बड़े पैमाने पर प्रवाह प्रदर्शित किया, जिसमें प्रमुख प्रवाह मुड़े हुए डोमेन दीवारों के साथ स्थानीयकृत थे। महत्वपूर्ण रूप से, ये डोमेन दीवारें दृढ़ता से स्थिर हो गईं, एक स्थायी, स्थान-भरने वाले वृक्ष-जैसे पैटर्न में विकसित और शाखाएं निकलीं जो "ग्रिड्लॉक" बन गईं - एक अवस्था जिसे गतिकीय अवरोध कहा जाता है।
इस अवरोध के लिए निश्चित, निर्विवाद साक्ष्य स्पेक्ट्रल विश्लेषण (चित्र 1g-1i) से आए:
* वेग शक्ति स्पेक्ट्रम (चित्र 1g): जबकि दोनों व्यवस्थाओं ने कम तरंग संख्याओं पर सार्वभौमिक $q^{-1}$ स्केलिंग प्रदर्शित की, संकुचित मामले ने बड़े पैमाने पर जेट से जुड़े पैमानों की एक विस्तृत श्रृंखला दिखाई। अवरुद्ध विस्तारशील मामले, हालांकि, एक संकीर्ण $q^{-1}$ सीमा और छोटी लंबाई के पैमानों पर एक अलग शिखर था, जो बड़े पैमाने पर अराजक प्रवाह पर स्थानीयकृत दीवार धाराओं के प्रभुत्व की पुष्टि करता है।
* फ्रैंक ऊर्जा स्पेक्ट्रम (चित्र 1h): विस्तारशील (अवरुद्ध) मामले ने एक बहुत संकीर्ण और तेज शिखर दिखाया, जो अराजक संकुचित व्यवस्था में व्यापक शिखर के विपरीत, एक अत्यधिक संगठित और स्थिर दीवार पैटर्न का संकेत देता है।
* सहसंबंध समय स्पेक्ट्रा (चित्र 1i): यह शायद सबसे सम्मोहक साक्ष्य था। अवरुद्ध व्यवस्था ने प्रवाह और नेमेटिक टेंसर दोनों क्षेत्रों के लिए काफी लंबे सहसंबंध समय प्रदर्शित किए, विशेष रूप से बड़े पैमाने पर। इसने गतिकी में कमी और पैटर्न के "लॉकिंग" को सीधे मापा, यह साबित करते हुए कि प्रणाली वास्तव में गतिकीय अवरोध से गुजरी थी।
आगे के साक्ष्य ने इन अवरुद्ध अवस्थाओं की उभरती टोपोलॉजी को उजागर किया। डोमेन दीवारों ने "छद्म-दोष" (स्टार्टपॉइंट, ब्रांचपॉइंट, एंडपॉइंट) बनाए जो, हालांकि वास्तविक टोपोलॉजिकल दोष नहीं थे, एक संरक्षित छद्म-आवेश (चित्र 3) ले जाते थे। सिमुलेशन ने प्रारंभिक धारीदार पैटर्न से, ज़िगज़ैग अस्थिरता और दीवार शाखाओं के माध्यम से, अंतिम ग्रिड्लॉक वृक्ष-जैसे पैटर्न (चित्र 2) तक गतिशील विकास को दर्शाया। "एंकरिंग मोटिफ" (चित्र 4a), छद्म-दोषों की एक विशिष्ट व्यवस्था, विशेष रूप से एक स्थिर संरचना के रूप में पहचानी गई, जो प्रवाह के लिए एक "जाल" के रूप में कार्य करती थी। लंबे समय के पैमाने (चित्र 5c) पर छद्म-दोष संख्या के धीमे विश्राम, कांच जैसी प्रणालियों में उम्र बढ़ने की घटनाओं की याद दिलाते हुए, अवरुद्ध अवस्था की अवरुद्ध प्रकृति को और रेखांकित किया। इसके अलावा, अवरुद्ध पैटर्न को "एकिकर्सिक भूलभुलैया" (चित्र 6b) को घेरने के लिए दिखाया गया था, जो अन्य प्रणालियों में एक दुर्लभ पैटर्न है, जो एक अद्वितीय पैटर्न-निर्माण घटना को प्रदर्शित करता है।
गतिकीय अवरोध की मजबूती को फिर क्यू-टेंसर मॉडल का उपयोग करके मान्य किया गया था। इस मॉडल ने पुष्टि की कि अवरोध दोष-मुक्त बाधा का एक कलाकृति नहीं है, बल्कि एक सामान्य विशेषता है जब दोष न्यूक्लियेशन ऊर्जावान रूप से दबाया जाता है (यानी, छोटा $\epsilon/l_a$)। जैसे ही दोष कोर आकार $\epsilon$ एक महत्वपूर्ण सीमा ($\approx 0.25 l_a$) से अधिक हो गया, वास्तविक $\pm 1/2$ दोषों ने न्यूक्लियेट करना शुरू कर दिया (चित्र 7b, 7e, 7f), अवरुद्ध दीवार पैटर्न को बाधित किया और प्रणाली को एक अव्यवस्थित, भंवर-प्रमुख अशांत अवस्था में बदल दिया। इस संक्रमण के साथ कुल लोचदार मुक्त ऊर्जा (चित्र 7b, 12c) में नाटकीय कमी आई, क्योंकि दोषों ने उच्च-ऊर्जा डोमेन दीवारों को कुशलतापूर्वक भंग कर दिया। सिमुलेशन ने यह भी दिखाया कि ब्रांचपॉइंट छद्म-दोष दोष न्यूक्लियेशन (मूवी S8) के लिए "हॉट स्पॉट" के रूप में कार्य करते थे, जिससे दोष-मुक्त और दोष-युक्त व्यवस्थाओं के बीच एक स्पष्ट कड़ी स्थापित हुई। क्यू-टेंसर मॉडल और छोटे $\epsilon/l_a$ (चित्र 11, मूवी S6) पर बाधित $\theta$ मॉडल के बीच मात्रात्मक समझौता दोष-मुक्त दृष्टिकोण की वैधता को उस सीमा में और मजबूत करता है।
सीमाएँ और भविष्य की दिशाएँ
हालांकि इस कार्य ने सक्रिय नेमेटिक अशांति में गहन अंतर्दृष्टि प्रदान की है, इसने कई सीमाओं को भी उजागर किया है और भविष्य के अनुसंधान के लिए कई रास्ते खोले हैं।
एक महत्वपूर्ण सीमा गतिकीय अवरोध का प्रायोगिक अहसास है। पत्र स्पष्ट रूप से कहता है कि इस प्राथमिक भविष्यवाणी का अभी तक प्रयोगों में अवलोकन नहीं किया गया है। इसे प्राप्त करने के लिए सक्रिय सामग्रियों की आवश्यकता होगी जहां दोष जोड़े के न्यूक्लियेशन की ऊर्जा लागत वर्तमान प्रायोगिक सेटअप की तुलना में काफी अधिक हो। यह सामग्री विज्ञान नवाचार की आवश्यकता की ओर इशारा करता है, शायद नए आणविक डिजाइन या पर्यावरणीय नियंत्रण शामिल हों जो दोष निर्माण को दबाते हैं।
अन्वेषण का एक और क्षेत्र सिस्टम आकार के प्रभाव से संबंधित है। जबकि बड़े पैमाने पर सिमुलेशन किए गए थे, लेखकों ने नोट किया कि और भी बड़े सिस्टम में, लगातार फ्रैक्चरिंग घटनाओं ने अवरुद्ध दीवार नेटवर्क की स्थायी, सिस्टम-व्यापी कनेक्टिविटी को रोका (मूवी S9)। यह बताता है कि एक महत्वपूर्ण सिस्टम आकार हो सकता है जिसके परे अवरुद्ध अवस्था अस्थिर हो जाती है, संभावित रूप से बड़े पैमाने पर अराजक प्रवाह की बढ़ती ताकत के कारण जो दीवार नेटवर्क को बाधित कर सकती है। भविष्य के काम को इस स्थिरता सीमा को मैप करने और बहुत बड़े पैमाने पर फ्रैक्चर के तंत्र को समझने का लक्ष्य रखना चाहिए।
अरैखिक तरंग दैर्ध्य चयन तंत्र एक खुला प्रश्न बना हुआ है। पत्र स्वीकार करता है कि यह तंत्र, जो दीवारों के मोटे होने और झुकने/मोड़ने को संतुलित करता है, स्वाभाविक रूप से अरैखिक और द्वि-आयामी है, और इसके सटीक निर्भरता विभिन्न मापदंडों पर अभी तक पूरी तरह से समझी नहीं गई है। इस जटिल परस्पर क्रिया को सुलझाने के लिए गहन सैद्धांतिक और कम्प्यूटेशनल अध्ययनों की आवश्यकता है।
इसके अलावा, दोष घनत्व की गैर-मोनोटोनिक निर्भरता कोर आकार पर देखी गई (कुछ व्यवस्थाओं में कोर आकार बढ़ने के साथ घटती हुई) आकर्षक है लेकिन पूरी तरह से समझाई नहीं गई है, जिसे भविष्य के काम के लिए स्थगित कर दिया गया है। यह दोष ऊर्जावान और पैटर्न निर्माण के बीच वर्तमान में समझी जाने वाली तुलना में एक अधिक जटिल संबंध का सुझाव देता है। बहुत छोटे दोष कोर आकार पर क्यू-टेंसर सिमुलेशन की कम्प्यूटेशनल लागत भी एक व्यावहारिक सीमा प्रस्तुत करती है, जिससे उस सीमा में सरल $\theta$ मॉडल एक आवश्यक विकल्प बन जाता है।
आगे देखते हुए, कई चर्चा विषय उभरते हैं:
- दोष-मुक्त सक्रिय नेमेटिक प्रणालियों का डिजाइन: हम प्रवाह संरेखण और दोष कोर आकार की समझ का लाभ उठाकर सक्रिय नेमेटिक प्रणालियों को कैसे इंजीनियर कर सकते हैं जो स्वाभाविक रूप से दोष निर्माण को दबाते हैं, इस प्रकार गतिकीय अवरोध को बढ़ावा देते हैं? इसमें सामग्री गुणों, गतिविधि स्तरों या परिरोध ज्यामिति को ट्यून करना शामिल हो सकता है।
- छद्म-दोषों और वास्तविक दोषों की परस्पर क्रिया: संक्रमणकालीन व्यवस्था जहां छद्म-दोष और वास्तविक टोपोलॉजिकल दोष सह-अस्तित्व में हैं, समृद्ध है और आगे की जांच के योग्य है। वास्तविक दोष, जो दीवारों के लिए मूल या समाप्ति बिंदु के रूप में कार्य कर सकते हैं, छद्म-दोष नेटवर्क के साथ कैसे परस्पर क्रिया करते हैं? क्या अवरुद्ध और अशांत अवस्थाओं के बीच स्विच करने के लिए इस परस्पर क्रिया को नियंत्रित किया जा सकता है?
- दीर्घ-श्रेणी टोपोलॉजिकल क्रम की प्रकृति: अवरुद्ध अवस्था में देखी गई एकिकर्सिक भूलभुलैया दीर्घ-श्रेणी टोपोलॉजिकल क्रम के एक रूप का सुझाव देती है। इस क्रम के गणितीय और भौतिक गुण क्या हैं? यह संघनित पदार्थ प्रणालियों में टोपोलॉजिकल क्रम के अन्य रूपों से कैसे तुलना करता है, और सामग्री गुणों पर इसके क्या प्रभाव हैं?
- कांच जैसी प्रणालियों और उम्र बढ़ने के साथ समानताएं: अवरुद्ध दीवार नेटवर्क की धीमी विश्राम गतिकी कांच जैसी प्रणालियों में उम्र बढ़ने की घटनाओं के साथ विशेषताएं साझा करती है। अवरुद्ध सक्रिय नेमेटिक्स की स्थिरता, विश्राम और उपद्रवों के प्रति प्रतिक्रिया को बेहतर ढंग से समझने के लिए कांच के भौतिकी से अंतर्दृष्टि का उपयोग किया जा सकता है?
- घटक कमी का प्रभाव: पत्र उल्लेख करता है कि नेमेटिक घटकों को दोषों पर प्रयोगात्मक रूप से कम होते देखा जाता है, जो दोष ऊर्जा लागत को कम कर सकता है। भविष्य के मॉडल में इस प्रभाव को शामिल करने से दोष न्यूक्लियेशन और दीवार नेटवर्क स्थिरता पर इसके प्रभाव का अधिक सटीक चित्र प्रदान किया जा सकता है।
- तीन आयामों में सामान्यीकरण: जबकि इस अध्ययन ने 2डी प्रणालियों पर ध्यान केंद्रित किया, विश्लेषण को तीन आयामों तक विस्तारित करना एक स्वाभाविक अगला कदम होगा। क्या समान गतिकीय अवरोध घटनाएं या छद्म-टोपोलॉजिकल संरचनाएं 3डी सक्रिय नेमेटिक्स में उभरेंगी, और उनके गुण कैसे भिन्न होंगे?
ये भविष्य की दिशाएँ इस क्षेत्र की अंतःविषय प्रकृति को रेखांकित करती हैं, जिसके लिए सक्रिय नेमेटिक प्रणालियों की जटिलताओं को पूरी तरह से उजागर करने के लिए सैद्धांतिक भौतिकविदों, सामग्री वैज्ञानिकों और प्रयोगात्मक लोगों के बीच सहयोग की आवश्यकता होती है।
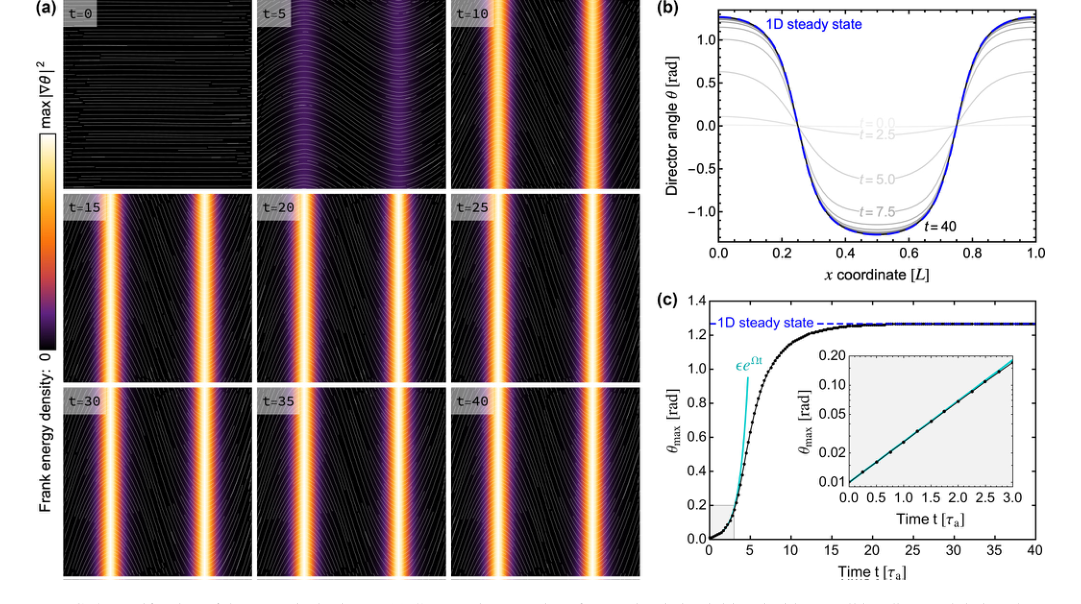 FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
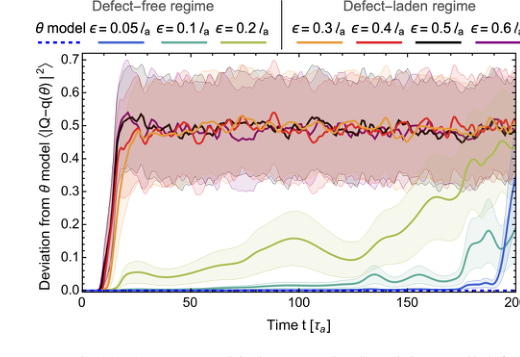 FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]
FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]