动态停滞在活性向列湍流中
Active fluids display spontaneous turbulentlike flows known as active turbulence.
背景与学术渊源
起源与学术渊源
活性流体,即由分子马达、细胞或合成粒子等内部组件驱动的材料,其研究已成为数十年来一个充满活力的领域。这种内部活动会产生自发的、通常是混乱的流动,统称为活性湍流。这种现象已在多种系统中观察到,包括细菌悬浮液、精子、细胞骨架混合物、细胞单层以及人造自驱动粒子 [1, 2-31]。历史上,尽管这些流动发生在惯性可忽略的低雷诺数下,但它们却与经典的惯性湍流惊人地相似。
活性向列湍流——一种特定类型的活性流体,其中细长粒子倾向于对齐——领域的最新进展揭示了某些特征(如速度功率谱)的普适标度律 [22,32,33]。例如,在小波数值 $q$ 下,速度功率谱的 $q^{-1}$ 标度律被发现非常稳健,独立于粘度或活性等特定材料属性,前提是雷诺数保持较低水平 [34]。这种普适行为在有缺陷和强有序无缺陷的向列相中都得到了观察 [32,33]。
然而,我们的理解中仍然存在一个显著的差距:尽管这些普适标度律已经确立,但材料属性和拓扑缺陷的存在与否对流动场其他非普适特征的影响在很大程度上仍未被探索。这种不确定性代表了一个根本性的局限性。先前的方法虽然在表征普适方面取得了成功,但未能充分解释诸如流动对齐参数或缺陷形成能量成本等因素如何塑造超越这些普适标度律的复杂模式和动力学。因此,本文旨在精确研究这些非普适特征,特别是关注无缺陷活性向列湍流中的“动态停滞”现象,这是一种前所未见且未被解释的状态。
直观的领域术语
为了帮助完全的初学者直观地理解本文使用的专业术语,这里提供一些日常类比:
- 活性流体: 想象一碗汤,其中每个微小的成分(如一小块意大利面或蔬菜丁)都有自己的微型马达,并不断移动,从内部搅动汤。与需要勺子搅拌的普通汤不同,这种汤完全是自搅动的。
- 向列序: 想象一片高草丛。在正常、无序的状态下,草叶可能指向各个方向。但具有向列序时,大多数草叶倾向于大致对齐在同一方向,就像它们都在轻柔的微风中一起摇曳一样。这种首选的集体方向就是科学家所说的“取向”。
- 活性向列湍流: 现在,将自搅动的汤与对齐的草叶结合起来。如果内部马达非常强大且混乱,它们不仅仅是轻柔地对齐;它们会产生旋转的、不可预测的、高度动态的电流,非常像一条狂野的河流急流或混乱的烟羽,但所有这些都是由成分本身产生的。这就是活性向列湍流。
- 拓扑缺陷: 在我们对齐的草地中,拓扑缺陷就像一个小的、局部的“结”或“漩涡”,草叶突然失去集体对齐并在一个中心点周围旋转,或指向冲突的方向。它是系统中本应有序但却出现强烈无序的点。
- 动态停滞: 想象一条繁忙的高速公路,汽车不断移动和变道,形成一种流动的、不断变化的交通模式。动态停滞就像这种交通流突然稳定成一个固定的、树状的“道路”和“溪流”网络。汽车仍然沿着这些路径行驶,但道路网络本身的整体结构变得稳定,不再发生剧烈演变。系统的混乱演变“冻结”成一种持久的、有组织的模式。
符号表
| 符号 | 类型 | 描述 |
|---|---|---|
| $\mathbf{v}$ | 变量 | 流速场 |
| $\mathbf{n}$ | 变量 | 向列取向场(棒状粒子局部平均取向) |
| $\psi$ | 变量 | 流函数(描述不可压缩流动) |
| $s$ | 变量 | 标量序参量(量化局部向列对齐强度) |
| $Q_{\alpha\beta}$ | 变量 | 向列序参量张量(描述向列序和对齐) |
| $K$ | 参数 | 弹性常数(衡量抵抗取向场畸变的程度) |
| $\eta$ | 参数 | 剪切粘度(流体抵抗剪切流动的能力) |
| $\zeta$ | 参数 | 活性应力参数(内部活性驱动强度) |
| $v$ | 参数 | 流动对齐参数(向列在剪切下重新取向的倾向) |
| $\gamma$ | 参数 | 转动粘度(抵抗取向场旋转的程度) |
| $A$ | 参数 | 活性数(活性力相对于系统尺寸的无量纲度量) |
| $R$ | 参数 | 粘度比(转动粘度与剪切粘度的比值,$\gamma/\eta$) |
| $S$ | 参数 | 活性应力符号(伸长/收缩系统为 $\pm 1$) |
| $\epsilon$ | 参数 | 缺陷核尺寸(拓扑缺陷核的特征尺寸) |
问题定义与约束
核心问题表述与困境
本文研究了活性向列湍流理解中的一个关键空白,即内部驱动组件在流体中产生自发、混乱的流动。先前的研究表明,活性向列湍流的速度功率谱表现出普适标度律,在很大程度上独立于特定材料属性或拓扑缺陷的存在。然而,材料属性和拓扑缺陷的缺失对这些流动的非普适特征的精确影响在很大程度上仍未被探索。
本文的起点(输入/当前状态)是活性向列湍流,特别是在“无缺陷”状态下。这种无缺陷状态通过显式模型构建(取向场具有固定模量的基于取向的模型,排除缺陷形成)或在缺陷核能量成本过高的情况下实现(具有小缺陷核尺寸的 Q-张量模型)。系统由活性应力参数 $\zeta$ 和描述液晶在剪切下重新取向倾向的流动对齐参数 $v$ 等参数表征。
期望的终点(输出/目标状态)是全面理解流动对齐参数 $v$ 和拓扑缺陷的抑制如何影响活性向列流动的时空结构和动力学。作者旨在揭示和表征在无缺陷活性向列湍流中出现的新的“停滞模式”,这些模式与存在缺陷时通常观察到的混乱流动不同。最终目标是阐明这种“动态停滞”的潜在机制,特别是它如何从向列畴壁的涌现有效拓扑及其连接规则中产生。
本文试图弥合的确切缺失环节或数学鸿沟是缺乏一个理论和计算框架,该框架能够系统地探索流动对齐、活性应力以及拓扑缺陷缺失之间的相互作用,以解释在活性湍流中涌现的有序、停滞状态。尽管普适标度律是已知的,但无缺陷系统中特定的、非普适的模式和动力学在很大程度上是未被表征的。本文旨在为这些因素如何导致从混乱湍流到动态停滞状态的转变提供详细的数学和物理解释。
试图解决这个特定问题的前辈研究者所陷入的痛苦的权衡或困境在于活性湍流本身的性质。活性湍流通常以持续的、混乱的、以涡旋为主的流动为特征,拓扑缺陷经常作为这种混乱的关键驱动者和组织者。困境在于,尽管缺陷是无序的来源,但它们也促成了某些状态下的持续湍流。本文揭示,在伸长型棒状向列相中,拓扑缺陷的缺失并没有导致更简单的湍流形式,而是导致了“动态停滞”。这暗示了一个反直觉的权衡:移除一个混乱源(缺陷)不一定会导致更有序的湍流状态,而是导致一种完全不同、停滞且动力学较少的状态。这挑战了缺陷仅是破坏性因素的传统观点,并突出了它们在维持湍流动力学中的作用。
约束与失效模式
理解活性向列湍流中动态停滞的问题由于几个严峻的、现实的约束而变得极其困难:
-
物理/材料约束:
- 无缺陷要求: 核心关注点是“无缺陷”活性向列湍流,这是一个重大的约束。拓扑缺陷在大多数活性向列系统中普遍存在,并且通常是混乱流动的首要驱动因素。在实验中实现和维持真正无缺陷的活性向列系统极其困难。本文通过使用一种通过构造禁止缺陷的取向模型(固定模量 $|n|=1$)和在缺陷核能量成本过高的条件下(Q-张量模型,缺陷核尺寸小)来解决这个问题。
- 参数敏感性: 动态停滞的发生高度依赖于材料属性的相互作用,特别是流动对齐参数 $v$ 和活性应力参数 $\zeta$。停滞状态仅在伸长型对齐状态下观察到(对于棒状向列相,当 $v \le 0$ 时,$\zeta v < 0$)。这意味着该现象并非在所有活性向列系统中都普遍存在,而是局限于一个特定的、狭窄的参数空间。
- 低雷诺数: 理论框架和模拟严格在“消失的雷诺数”下进行,这意味着惯性效应可忽略不计。虽然这简化了流体动力学,但它限制了研究结果直接应用于惯性起重要作用的系统的可能性,因为惯性可能会改变流动模式和稳定性。
- 缺陷核尺寸阈值: 在更通用的 Q-张量模型中,缺陷核尺寸 $\epsilon$ 与活性长度 $l_a$ 的比值是一个关键的控制参数。只有当 $\epsilon \ll l_a$ 时,动态停滞才会持续,这意味着缺陷成核在能量上受到抑制。如果 $\epsilon$ 超过临界阈值(对于固定的 $Sv = -1$,约为 $0.25 l_a$),则会形成缺陷,导致停滞状态的崩溃并转变为有缺陷的湍流。这为观察该现象施加了一个严格的物理条件。
-
计算约束:
- 大规模模拟: 观察动态停滞的涌现模式和长期动力学需要“大规模数值模拟”。这转化为巨大的计算成本和时间,尤其是在探索不同参数区域和系统尺寸时。
- Q-张量模型的数值刚度: 模拟完整的 Q-张量模型,特别是在小缺陷核尺寸 ($\epsilon \to 0$) 的极限下,变得“越来越刚性和计算成本高昂”。这种刚度源于需要解析潜在缺陷核相关的尖锐梯度和小长度尺度,使得更简单的基于取向的模型在这种极限下成为更实用的替代方案。
- 复杂的混合数值方案: 模拟采用复杂的混合数值方案,将伪谱法用于动量平衡,将有限元法用于角度场演化。这种复杂的设置,包括用于对流项的特征-Galerkin方法、用于拉普拉斯项的隐式处理以及用于时间演化的 Adams-Bashforth 方法,对于确保所涉及的各种物理现象的数值稳定性和准确性是必需的。
- 系统尺寸限制: 尽管作者进行了“更大系统尺寸”的模拟以测试停滞的持续性,但这些模拟“需要显著更大的计算量”。这表明计算资源对研究这些现象的尺度施加了实际限制,可能影响在真正宏观系统中观察到非常长程相关性或停滞状态的稳定性。
-
数据驱动/实验约束:
- 缺乏实验验证: 一个主要的约束是“验证我们对无缺陷活性向列的预测在实验上具有挑战性”,因为“动态停滞——我们的主要预测——尚未在实验中实现”。尽管一些元素,如伪缺陷和迷宫状图案,已被观察到,但持续的、跨越整个系统的停滞状态在实验中仍然难以捉摸。这使得有必要寻找新的活性材料,其中缺陷成核的成本比目前研究的系统要高得多。
- 控制缺陷的困难: 在实验活性向列系统中精确控制或抑制拓扑缺陷的能力是一个重大的障碍。大多数实验装置固有地产生缺陷,使得分离和研究模型预测的无缺陷区域变得困难。
为什么选择这种方法
选择的必然性
作者选择基于取向的无缺陷模型并非仅仅是偏好,而是由他们试图解决的问题所决定的必然结果:即在没有拓扑缺陷的情况下理解“活性向列湍流中的动态停滞”。传统的“SOTA”(最先进的)方法,如标准的 Q-张量模型,旨在考虑拓扑缺陷的成核和动力学,而拓扑缺陷在大多数活性向列系统中普遍存在。然而,本文的核心新颖之处在于探索一个缺陷被抑制或完全被构造禁止的区域。
作者意识到传统方法不足的精确时刻是他们决定研究无缺陷状态时。他们选择的模型,是先前最小模型 [33] 的推广,明确规定了向列取向场具有固定的模量 $|n|=1$。正如第二节所述,这个约束“排除了拓扑缺陷的产生 [33,38]”。这个刻意的设计选择至关重要,因为动态停滞现象,其特征是稳定的、树状的畴壁模式,会被移动的拓扑缺陷根本性地改变甚至阻止。如果没有一个保证无缺陷环境的模型,分离和表征这种新颖的停滞状态将是不可能的。Q-张量模型虽然更通用,但会引入缺陷,从而模糊了作者希望揭示的特定动力学。
相对优越性
除了简单的性能指标外,基于取向的无缺陷模型对于这个特定的研究问题提供了深刻的定性优势。其结构优势在于能够分离和突出那些被拓扑缺陷的混乱动力学所掩盖的现象。
- 揭示动态停滞: 最显著的定性优势是其揭示“动态停滞”状态的能力。在伸长型对齐向列相 ($S\nu < -1$) 中,该模型表明向列畴壁“被它们牵引的流动强烈稳定”,导致“空间填充的树状模式”[图 1(d)-1(f)]。这种停滞状态是一个新颖的发现,不同于其他方法通常观察和研究的混乱、有缺陷的湍流。
- 处理高维噪声和长期稳定性: 停滞状态表现出“弱得多的”大尺度混乱流动和“长得多的相关时间,尤其是在大尺度下向列张量场的相关时间 [图 1(i),蓝色]”。这表明在捕捉稳定、长寿命的结构和动力学方面具有定性优势,而这些在有缺陷的系统中常常被高维噪声和短相关时间所压倒。该模型有效地减少了缺陷动力学的“噪声”,从而清晰地展现了潜在的模式形成机制。
- 目标区域的计算效率: 虽然不是主要关注点,但本文指出了一项实际优势。在第五节 A 中讨论 Q-张量模型时,作者提到,“注意,Q-张量模拟在此极限下(小缺陷核尺寸)变得越来越刚性和计算成本高昂,使得 $\theta$ 模型成为一种更有效和实用的替代方案。”对于无缺陷区域(对应于非常小的缺陷核尺寸),基于取向的模型在计算成本和稳定性方面压倒性地优越,从而可以对停滞状态进行更广泛的模拟。
与约束的一致性
所选择的基于取向的模型完美地符合研究活性向列湍流不包含拓扑缺陷复杂性的隐含约束。问题严苛的要求与解决方案的独特属性之间的“结合”在几个方面显而易见:
- 强制无缺陷状态: 最关键的约束是拓扑缺陷的缺失。该模型通过将取向场模量固定为 $|n|=1$ 来构建,固有地阻止了缺陷成核 [33,38]。这是一个直接且完美的匹配,确保了任何观察到的现象都仅仅源于活性、流动对齐和向列弹性的相互作用,而不是缺陷动力学。
- 关注流动对齐: 本文的目标是研究“流动对齐参数 $\nu$”如何影响活性向列湍流。Ericksen-Leslie 液晶模型,它是他们方法的基础,自然地包含了这个参数,从而可以直接研究其对流动时空结构和动态停滞涌现的影响。
- 最小化方法以求清晰: 通过剥离缺陷动力学的复杂性,该模型遵循最小化方法,从而能够更清晰地识别模式形成和停滞的潜在机制。这符合向零基础读者直观解释复杂现象的目标。该模型简化了系统,以突出当缺陷缺失时可能发生的根本不同的行为。
替代方案的拒绝
本文隐含地和明确地拒绝了替代方法,特别是完整的 Q-张量模型,作为他们对无缺陷活性向列进行初步研究的主要工具。拒绝的理由是多方面的且清晰的:
- 计算成本和刚度: 如第五节 A 所述,当缺陷核尺寸 $\epsilon$ 非常小时(接近无缺陷极限),“Q-张量模拟变得越来越刚性和计算成本高昂”。对于缺陷在能量上被抑制或缺失的区域,基于取向的 $\theta$ 模型是“一种更有效和实用的替代方案”。这是不将 Q-张量模型作为此特定问题主要方法的一个强有力的实际理由。
- 缺陷的混淆效应: 主要目标是研究没有拓扑缺陷的情况下的现象。Q-张量模型的设计允许缺陷成核和动力学。使用这样的模型会引入额外的复杂性层,使得难以分离导致无缺陷环境中动态停滞的特定机制。作者明确指出,“大多数活性向列的实验和模拟都是在有缺陷的区域进行的”(第七节),这意味着这些先前的方法不适合他们新颖的无缺陷研究。
- 验证而非替代: Q-张量模型在第五节稍后被引入,不是作为替代品,而是为了“划定我们的无缺陷发现仍然适用的区域,以及(2)探索当这些条件不再满足时出现的更熟悉的有缺陷行为的过渡。”这表明 Q-张量模型作为背景化他们无缺陷发现和探索过渡的宝贵工具,但它并不是研究无缺陷停滞状态本身的首选工具。本文表明,在无缺陷极限下,$\theta$ 模型收敛到 Q-张量模型,证实了该简单模型在此特定区域的有效性。能够将缺陷的影响与其他参数分离开来对于本文的发现至关重要。
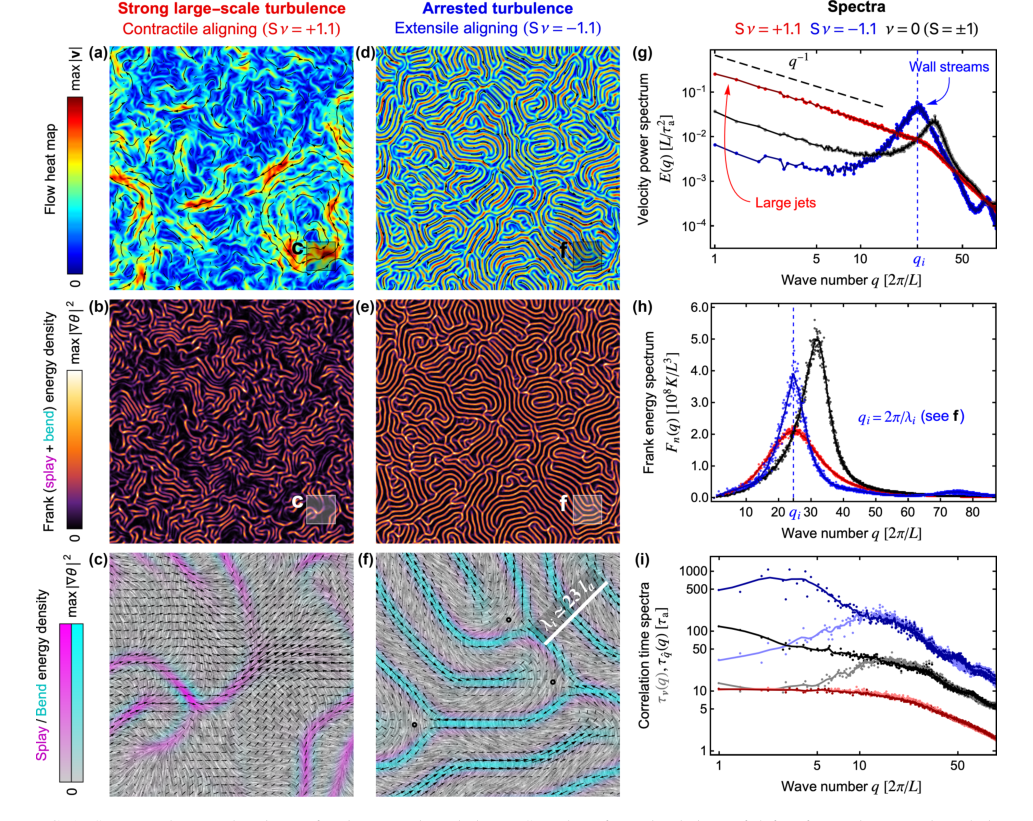 FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
数学与逻辑机制
主方程
活性向列湍流的基本行为,特别是在本文研究的无缺陷区域,由流体流动与向列液晶取向之间的相互作用决定。这种相互作用由两个耦合的偏微分方程捕获:一个描述流体的动量平衡,在无量纲化并取其旋度后,变成一个关于流函数的泊松方程;另一个描述向列取向场的动力学。
无量纲化的动量平衡方程(在消失的雷诺数下从 Navier-Stokes 类方程取旋度得到)为:
$$
\nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) \quad \text{(6)}
$$
无量纲化的取向动力学方程(描述向列取向如何随时间变化)为:
$$
\partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi \quad \text{(8)}
$$
这两个方程 (6) 和 (8) 构成了无缺陷活性向列模型数学引擎。它们是耦合的,因为流体流动(由 $\psi$ 表示)影响向列取向($\theta$),而向列取向的构型影响流体流动。
项的逐一剖析
让我们剖析这些主方程的每个组成部分,以理解它们的数学意义和物理作用。
方程 (6):动量平衡
$$ \nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) $$
-
$\nabla^4\psi$:
- 数学定义:这是作用在流函数 $\psi$ 上的双调和算子。它等同于 $\nabla^2(\nabla^2\psi)$。由于 $\omega = -\nabla^2\psi$(涡度),这一项实际上是 $-\nabla^2\omega$。
- 物理/逻辑作用:在流体动力学中,这一项代表涡度的粘性耗散。它作为一种阻尼机制,抵抗流体流动的变化,并倾向于平滑速度梯度。使用 $\nabla^4$(而不是仅使用 $\nabla^2$)源于将斯托克斯方程(低雷诺数下的动量平衡)取两次旋度以消除压力,并将所有内容用流函数表示。
- 为何是 $\nabla^4$:当用流函数表示斯托克斯方程(低雷诺数下的动量平衡)并取旋度时,该算子自然出现。它确保流体流动保持不可压缩,并考虑了粘性力。
-
$S$:
- 数学定义:一个无量纲参数,$S = \text{sign}(\zeta)$,其中 $\zeta$ 是活性应力参数。
- 物理/逻辑作用:该参数决定了活性应力的性质。对于伸长型应力(例如,棒状组件向外推),$S = +1$;对于收缩型应力(例如,马达蛋白向内拉),$S = -1$。它是系统行为的关键控制参数,影响系统是表现出强湍流还是动态停滞。
- 为何是符号:符号捕捉了活性组件产生应力的基本差异,这对产生的流动模式有深远影响。
-
$\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$:
- 数学定义:这是向列取向张量 $\tilde{g}_{\alpha\beta}$ 的散度。张量 $\tilde{g}_{\alpha\beta}$ 定义为 $\tilde{g}_{\alpha\beta} = n_\alpha n_\beta - \frac{1}{2}\delta_{\alpha\beta}$,其中 $n_\alpha$ 是向列取向 $\mathbf{n} = (\cos\theta, \sin\theta)$ 的分量,$\delta_{\alpha\beta}$ 是克罗内克尔 delta。
- 物理/逻辑作用:这一项代表向列组件产生的活性应力。活性向列材料将化学能转化为机械功,产生驱动流体流动的应力。$\tilde{g}_{\alpha\beta}$ 的散度捕捉了这些应力如何分布以及它们如何驱动流体运动。
- 为何是散度:应力张量(如 $\sigma^A$)的散度代表该应力施加在流体上的力密度。这是将应力耦合到流体动量的一种标准方法。
-
$R$:
- 数学定义:无量纲粘度比,$R = \gamma/\eta$。
- 物理/逻辑作用:该参数比较了向列取向的转动粘度($\gamma$)与流体的剪切粘度($\eta$)。它影响向列取向在响应流动和弹性力矩时重新取向的难易程度。
- 为何是比值:它是一个比值,因为它比较了系统中两种不同类型的粘性阻力,这对于理解取向旋转与流体流动之间的平衡至关重要。
-
$\nu$:
- 数学定义:无量纲流动对齐参数。
- 物理/逻辑作用:该参数表征了液晶取向在剪切流下重新取向的倾向。如果 $\nu < 0$,向列倾向于与流动对齐(流动对齐状态);如果 $\nu > 0$,则倾向于翻滚(翻滚状态)。该参数是本文关于动态停滞发现的核心。
- 为何是系数:它是一个系数,用于缩放流动对齐效应的强度,这是液晶的一个关键材料属性。
-
$\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp)$:
- 数学定义:这一项代表由流动对齐和 Ericksen 应力引起的应力的散度。$h_\parallel$ 和 $h_\perp$ 是取向场 $h_\alpha$ 的分量,在方程 (7) 中定义为 $h_\parallel = \frac{1}{A}\nabla^2\theta$ 和 $h_\perp = \nu(\sin 2\theta d_1\psi + \cos 2\theta d_2\psi)$,其中 $d_1 = \frac{1}{2}(\partial_x^2 - \partial_y^2)$ 和 $d_2 = \partial_x\partial_y$。完整的 $h_\alpha$ 是作用在取向上的弹性力矩。
- 物理/逻辑作用:这一项捕捉了弹性应力(Ericksen 应力)和由流动对齐引起的应力。弹性应力源于向列取向场的畸变,而流动对齐描述了向列取向如何响应流体的拉伸流动而重新取向。这些应力反馈到流体动量平衡中,影响流动场。
- 为何是差值:$\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp$ 的特定组合源于偏应力张量的对称部分(方程 4),该部分包括弹性力矩和流动对齐的贡献。该张量的散度代表作用在流体上的力密度。
方程 (8):取向动力学
$$ \partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi $$
-
$\partial_t\theta$:
- 数学定义:向列角度 $\theta$ 对时间 $t$ 的偏导数。
- 物理/逻辑作用:这是时间演化项,表示在空间固定点处向列取向改变的速度。它是动力学的核心。
- 为何是导数:它是任何动力学方程的基本组成部分,描述状态变量的变化率。
-
$\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$:
- 数学定义:这是对流项,表示向列角度 $\theta$ 被流体流动所平流。$\epsilon_{\alpha\beta}$ 是 Levi-Civita(全反对称)张量,$\partial_\alpha\psi$ 代表流体速度 $\mathbf{v}$ 的分量。
- 物理/逻辑作用:这一项描述了向列取向如何被流体流动所携带。如果一个流体单元移动,它会带走其向列取向。这是一个关键的非线性项,将取向动力学与流体速度耦合。
- 为何是 $\epsilon_{\alpha\beta}$ 和乘法:Levi-Civita 张量用于形成流函数的旋度,得到速度分量。项 $\mathbf{v} \cdot \nabla\theta$ 代表物质导数,捕捉了由于局部时间演化和流动输运引起的变化。
-
$\frac{1}{A}\nabla^2\theta$:
- 数学定义:向列角度 $\theta$ 的拉普拉斯算子,由活性数 $A$ 的倒数缩放。
- 物理/逻辑作用:这一项代表弹性力矩,它抵抗向列取向场的空间变化(畸变)。它倾向于平滑取向的剧烈变化,起着恢复力的作用。活性数 $A = L^2/l_a^2$ 比较了系统尺寸 $L$ 与活性长度 $l_a = \sqrt{K/(|\zeta|R)}$,这是活性和向列弹性应力之间的平衡。较大的 $A$ 表示弹性力相对于活性力较弱。
- 为何是 $\nabla^2$:拉普拉斯算子是用于扩散或弹性力(倾向于最小化空间梯度)的标准数学算子。
-
$h_\parallel$:
- 数学定义:取向场 $h_\alpha$ 的平行分量,它与 Frank 自由能有关。具体来说,$h_\parallel = \frac{1}{A}\nabla^2\theta$(来自方程 (7) 和方程 (8) 的上下文)。
- 物理/逻辑作用:这一项代表作用在取向上的弹性力矩,驱动其趋向于最小化弹性畸变的状态。它与左侧的 $\frac{1}{A}\nabla^2\theta$ 项是相同的弹性恢复力,但在这里它被明确显示为一个源项。方程 (8) 中的表述有效地结合了弹性力矩项。
- 为何是加法:右侧的项是取向旋转的源或汇,有助于 $\theta$ 的整体变化。
-
$\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$:
- 数学定义:流动对齐项,由流动对齐参数 $\nu$ 缩放,并涉及向列取向张量 $\tilde{g}_{\alpha\beta}$ 和流函数 $\psi$ 的二阶导数。
- 物理/逻辑作用:这一项描述了由于拉伸流动(剪切)引起的向列取向的重新取向。它捕捉了流体的变形场(与 $\partial_\alpha\partial_\beta\psi$ 相关)如何导致向列棒状物对齐或翻滚,具体取决于 $\nu$ 的符号。这是一个关键的耦合项。
- 为何是乘法:它是流动对齐参数、向列取向和应变率张量(从 $\partial_\alpha\partial_\beta\psi$ 导出)的乘积,反映了这些因素如何组合产生重新取向的力矩。
关键无量纲参数:
- $L$:系统尺寸(长度尺度)。
- $\tau_a = \eta/|\zeta|$:活性时间尺度。
- $K$:Frank 弹性常数。
- $\eta$:剪切粘度。
- $\gamma$:转动粘度。
- $\zeta$:活性应力参数。
- $A = L^2/l_a^2 = RL^2|\zeta|/K$:活性数。比较系统尺寸与活性长度 $l_a$。大的 $A$ 表示相对于弹性阻力,活性力较强。
- $R = \gamma/\eta$:粘度比。
- $\nu$:流动对齐参数。
分步流程
想象一个代表活性向列系统在特定位置和时间的瞬时状态的抽象数据点。该状态主要由局部向列取向角 $\theta$ 和流体流函数 $\psi$ 定义。系统通过数值模拟进行迭代演化,就像一个机械装配线处理这些数据点一样。
-
初始状态输入:在给定的时间步 $n$,我们拥有整个空间网格上当前的向列角度场 $\theta^n$ 和流函数场 $\psi^n$。
-
动量平衡计算(方程 6 / A1):
- 系统首先关注更新流体流动。它采用当前的向列角度 $\theta^n$,并用它来计算活性应力($S(d_1 \sin 2\theta^n + d_2 \cos 2\theta^n)$ 项)和流动对齐/Ericksen 应力($-\frac{R\nu}{A}(d_1 \cos 2\theta^n \nabla^2\theta^n - d_2 \sin 2\theta^n \nabla^2\theta^n)$ 项,这是 (A1) 右侧的一部分)。这些项充当驱动流体的“强迫函数”。
- 然后将这些强迫函数输入到动量平衡方程中,这是一个关于 $\psi$ 的双调和方程。该方程使用伪谱法求解。这意味着空间导数是在傅里叶空间中非常高效地计算的。
- 至关重要的是,(A1) 右侧的 $G(\theta^n, \psi^n)$ 项(这是流动对齐应力的一部分)本身依赖于 $\psi$。为了处理这种情况,使用了不动点迭代:使用 $\psi$ 的初始猜测(通常来自前一个时间步)来计算 $G$,然后求解方程得到新的 $\psi$。这个过程重复进行,直到计算出的 $\psi$ 收敛到当前时间步的稳定值,从而确保流动与它产生的应力之间的自洽性。
- 一旦确定了 $\psi^n$,就从 $\psi^n$ 计算出辅助流动场,如速度分量($v_x, v_y$)、涡度($\omega$)和流动对齐旋转($C^n$)。
-
取向动力学计算(方程 8 / A4):
- 接下来,系统转向更新向列取向。它采用新计算出的流动场($v_x, v_y$)和当前的向列角度 $\theta^n$。
- 取向动力学方程 (8) 描述了 $\theta$ 如何变化。对流项($\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$)决定了向列取向如何被流体流动平流。弹性项($\frac{1}{A}\nabla^2\theta$)的作用是平滑取向畸变。右侧的项($h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$)代表弹性力矩和由拉伸流动引起的重新取向。
- 该方程使用有限元法求解。对流项使用特征-Galerkin 方法单独处理以提高稳定性,有效地追踪流体单元的路径。弹性(拉普拉斯)项被隐式处理,这意味着它与新的 $\theta^{n+1}$ 同时求解,以确保数值稳定性,特别是对于刚性项(如弹性力,如果不小心处理可能导致快速变化)。它有效地“收敛”到一个满足当前流动方程的稳定 $\theta^{n+1}$。
-
推进时间步:系统然后将时间从 $n$ 递增到 $n+1$,整个过程重复进行,使用 $\theta^{n+1}$ 和 $\psi^{n+1}$ 作为新的输入。
这种迭代的耦合过程允许系统演化,流体流动和向列取向不断相互影响,从而产生观察到的复杂模式和动态状态,如活性湍流或停滞模式。
优化动力学
这里的“优化动力学”与其说是传统的机器学习优化(如梯度下降最小化损失函数),不如说是数值解的迭代过程以及系统趋向稳定或准稳定状态的长期物理演化。
-
每个时间步的数值收敛:
- 流函数的定点迭代:在每个时间步内,使用不动点方法求解流函数 $\psi$ 的动量平衡方程 (A1)。这意味着使用 $\psi$ 的初始猜测来计算非线性项,然后计算新的 $\psi$。这个新的 $\psi$ 然后成为下一次迭代的输入,过程重复进行,直到连续 $\psi$ 解之间的差异低于小的计算容差(例如,$10^{-8}$)。这确保了流体流动场与该瞬时向列取向产生的应力自洽。这里的“损失景观”是方程的残差误差,迭代旨在找到其“最小值”(零残差)。
- 取向动力学的隐式处理:对于取向动力学方程 (A4),拉普拉斯(弹性)项被隐式处理。这意味着下一个时间步的 $\theta$ 值 $\theta^{n+1}$ 是直接求解的,而不是显式地从 $\theta^n$ 计算。这种方法提高了数值稳定性,特别是在处理刚性项时(如弹性力,如果不小心处理可能导致快速变化)。它有效地“收敛”到一个满足给定当前流动的稳定 $\theta^{n+1}$。
-
物理系统演化与“学习”:
- 迭代状态更新:整个模拟通过从一个时间步迭代更新场 $\theta$ 和 $\psi$ 到下一个时间步来进展。这种流体和取向动力学之间的连续反馈循环驱动着系统的演化。
- 损失景观(隐式):虽然没有明确定义为损失函数,但系统的动力学可以被认为是导航一个复杂的“能量景观”(例如,Frank 自由能、体自由能)。系统自然地演化到最小化这些能量的状态,或者在活性系统中,达到动态维持的非平衡状态。
- 梯度和驱动力:方程中的各种项充当“梯度”或驱动力。例如,活性应力项 ($S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$) 驱动流体运动,而弹性项($\nabla^2\psi$ 和 $\nabla^2\theta$)充当恢复力,试图平滑畸变。流动对齐项($\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$)决定了向列如何响应流动而重新取向,从而塑造系统的响应。
- 收敛到动态停滞:本文的核心发现是,在特定参数区域(例如,伸长型对齐向列相,其中 $S\nu < -1$),系统“收敛”到一个动态停滞状态。这不是寻找全局最小值的优化,而是系统进入一个稳定的、非平衡的模式(树状畴壁网络),其中混乱的流动被抑制,动力学变得非常缓慢,类似于玻璃系统中的老化现象。系统通过活性力、粘性耗散、弹性力矩和流动对齐的连续相互作用“学习”形成这些稳定的模式。“梯度”有效地引导系统进入这些停滞构型。
- 噪声的作用:向取向动力学(附录 A.4)中添加了小幅度的均匀白噪声,以加速向完全发展的活性湍流的演化。这种噪声充当扰动,帮助系统探索“景观”并逃离潜在的局部最小值或亚稳态,确保它达到特征性的湍流或停滞区域。
本质上,“优化”是物理系统在这些控制方程下自然演化的趋势,由活性力驱动并受材料属性约束,直到达到一个特征性的动态或停滞状态。数值方法确保了这种演化能够被准确而稳定地模拟。
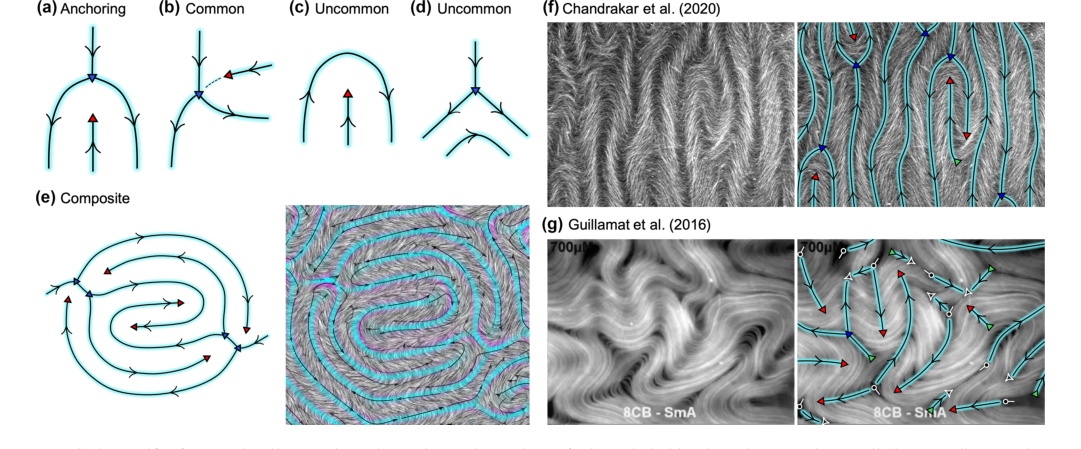 FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
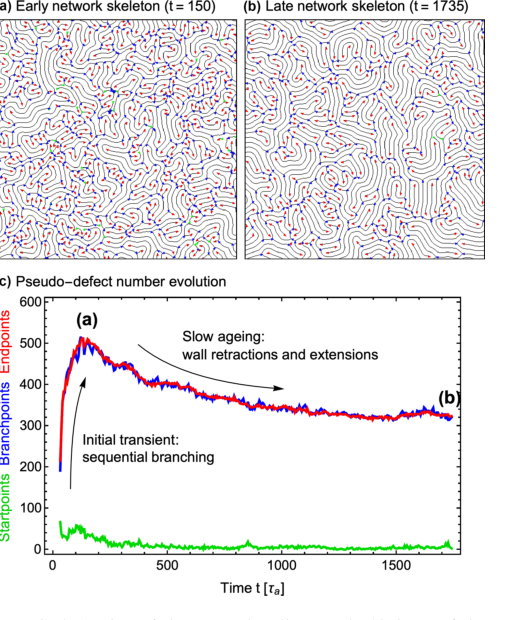 FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
结果、局限性与结论
实验设计与基线
作者精心设计了他们的数值实验,以严格研究活性向列湍流的动力学,特别是关注拓扑缺陷和流动对齐的作用。他们的主要工具是大型数值模拟,采用了两种主要模型:
首先,使用了一个基于取向的无缺陷模型,该模型通过引入流动对齐和 Ericksen 应力来推广先前的工作。该模型由方程 (6)-(8) 控制,通过强制执行具有固定模量的连续取向场来固有地排除拓扑缺陷的形成。这种结构选择对于在没有缺陷干扰的情况下分离畴壁动力学至关重要。该模型中的关键无量纲参数包括活性数 $A = L^2/l_a^2$、粘度比 $R = \gamma/\eta$ 和流动对齐参数 $\nu$。对于大多数模拟,设置 $R=1$ 和 $A=3.2 \times 10^5$,这是一个在 $\nu=0$ 时表现出大规模活性湍流的区域。实验专门设计用于比较两个不同的区域:
1. 收缩型对齐(Sv > 1),以 $S=-1$(收缩应力)和 $\nu=-1.1$(流动对齐棒状物)为例。这作为“强大规模湍流”的基线。
2. 伸长型对齐(Sv < -1),具有 $S=+1$(伸长应力)和 $\nu=-1.1$。该区域被假设为表现出“停滞湍流”。
还包括一个 $\nu=0$(非对齐)的参考案例,其中收缩和伸长应力在旋转下是等效的,提供了一个中性基线进行比较。
其次,使用了一个无约束的 Q-张量模型来拓宽其研究结果的背景并探索向有缺陷动力学的过渡。该模型基于附录 D 中详细描述的 Landau-de Gennes 框架(Beris-Edwards 模型),明确允许形成真正的 $\pm 1/2$ 拓扑缺陷。一个关键的控制参数是缺陷核尺寸 $\epsilon$ 与活性长度 $l_a$ 的比值。使用该模型的模拟参数为 $R=1$、$S=1$、$A=10000$ 和 $\nu=-1$,从一个静止的向列状态开始,并带有小的角度扰动。
数值积分依赖于混合方案,将伪谱法用于动量平衡(方程 (6))和有限元法用于角度场演化(方程 (8)),如附录 A 所述。引入了小幅度的均匀白噪声以加速向完全发展的活性湍流的演化。“受害者”(基线模型)是作者试图区分或超越的,主要是 $\nu=0$ 非对齐案例以及收缩型对齐区域中观察到的强大规模湍流。Q-张量模型也作为对无缺陷模型预测稳健性的严格检验。
证据证明的内容
本文提出的证据明确证明了无缺陷活性向列湍流可以经历一个显著的动态停滞,其特征是出现一个稳定的、树状的向列畴壁网络,该网络引导相干流动并抑制混乱运动。
通过将伸长型对齐区域(Sv < -1)与收缩型对齐区域(Sv > 1)和 $\nu=0$ 参考案例进行比较,动态停滞的核心机制得到了无情地证明。在收缩型对齐区域中,模拟(图 1a-1c,Movie S1)显示出高度混乱的流动,具有强烈的瞬时大规模射流和破碎的、动态重组的向列畴壁。这代表了“强大规模湍流”的基线。与此形成鲜明对比的是,伸长型对齐区域(图 1d-1f,Movie S2)表现出显著减弱的大规模流动,主要的流动局限于弯曲的畴壁。至关重要的是,这些畴壁被强烈稳定,生长并分支成一个持久的、空间填充的树状模式,该模式变得“卡死”——一种称为动态停滞的状态。
这种停滞的明确、无可辩驳的证据来自频谱分析(图 1g-1i):
* 速度功率谱(图 1g):尽管两个区域在低波数值下都显示出普适的 $q^{-1}$ 标度律,但收缩型案例显示出与大规模射流相关的广泛尺度。然而,停滞的伸长型案例具有更窄的 $q^{-1}$ 范围和在较短长度尺度上的明显峰值,证实了局部壁流相对于大规模混乱流动的优势。
* Frank 能量谱(图 1h):伸长型(停滞)案例显示出更窄、更尖锐的峰值,表明高度有序且稳定的壁模式,与混乱收缩区域的更宽峰值不同。
* 相关时间谱(图 1i):这可能是最有说服力的证据。停滞区域在流动和向列张量场方面都表现出显著更长的时间相关性,尤其是在大尺度下。这直接量化了减少的动力学和模式的“锁定”,证明系统确实经历了动态停滞。
进一步的证据突出了这些停滞状态的涌现拓扑。畴壁形成了“伪缺陷”(起点、分支点、终点),尽管它们不是真正的拓扑缺陷,但携带了守恒的伪电荷(图 3)。模拟说明了从初始条纹模式到之字形不稳定性再到壁分支,最终达到卡死的树状模式的动态演化(图 2)。“锚定基序”(图 4a),一种特定的伪缺陷排列,被确定为一种特别稳定的结构,充当流动的“陷阱”。伪缺陷数量在长时间尺度上的缓慢弛豫(图 5c),让人联想到玻璃系统中的老化现象,进一步强调了该状态的停滞性质。此外,停滞模式被证明包围着“单向迷宫”(图 6b),这是其他系统中罕见的模式,展示了一种独特的模式形成现象。
然后使用Q-张量模型验证了动态停滞的稳健性。该模型证实,停滞并非无缺陷约束的产物,而是当缺陷成核在能量上受到抑制时(即,$\epsilon/l_a$ 很小时)的普遍特征。随着缺陷核尺寸 $\epsilon$ 增加到临界阈值($\approx 0.25 l_a$)以上,真正的 $\pm 1/2$ 缺陷开始成核(图 7b, 7e, 7f),破坏了停滞的壁模式,并将系统转变为无序的、以涡旋为主的湍流状态。这种转变伴随着总弹性自由能的急剧降低(图 7b, 12c),因为缺陷有效地消解了高能畴壁。模拟还显示分支点伪缺陷充当缺陷成核的“热点”(Movie S8),建立了无缺陷和有缺陷区域之间的明确联系。Q-张量模型与小 $\epsilon/l_a$ 下的 $\theta$ 模型之间的定量一致性(图 11, Movie S6)进一步巩固了该简单模型在该极限下的有效性。
局限性与未来方向
尽管这项工作为活性向列湍流提供了深刻的见解,但它也突出了一些局限性,并为未来的研究开辟了许多途径。
一个显著的局限性是动态停滞的实验实现。本文明确指出,这一主要预测尚未在实验中观察到。要实现这一点,需要活性材料,其中成核缺陷对的能量成本比当前实验装置要高得多。这表明需要材料科学创新,可能涉及新的分子设计或环境控制来抑制缺陷形成。
另一个需要进一步探索的领域是系统尺寸效应。尽管进行了大规模模拟,但作者指出,在更大的系统中,频繁的断裂事件阻止了停滞壁网络的持久的、跨越整个系统的连通性(Movie S9)。这表明可能存在一个临界系统尺寸,在此尺寸之上,停滞状态变得不稳定,这可能是由于可能破坏壁网络的混乱大规模流动的强度增加所致。未来的工作应旨在绘制出这个稳定性边界,并理解非常大尺度的断裂机制。
非单调波长选择机制仍然是一个悬而未决的问题。本文承认,这种机制平衡了畴壁的粗化和弯曲/折叠,本质上是非线性和二维的,其对各种参数的确切依赖性尚未完全理解。需要更深入的理论和计算研究来揭示这种复杂的相互作用。
此外,观察到的缺陷密度对核尺寸的非单调依赖性(在某些区域随核尺寸增加而减小)非常有趣,但尚未完全解释,留待未来工作。这表明缺陷能量学与模式形成之间的关系比目前理解的更为复杂。Q-张量模型在非常小的缺陷核尺寸下的计算成本也带来了实际限制,使得更简单的 $\theta$ 模型在该区域成为必要的替代方案。
展望未来,出现了几个讨论话题:
- 设计无缺陷活性向列系统:我们如何利用对流动对齐和缺陷核尺寸的理解来设计固有抑制缺陷形成的活性向列系统,从而促进动态停滞?这可能涉及调整材料属性、活性水平或限制几何形状。
- 伪缺陷与真实缺陷的相互作用:伪缺陷和真实拓扑缺陷共存的过渡区域非常丰富,值得进一步研究。真实缺陷(可以作为畴壁的起点或终点)如何与伪缺陷网络相互作用?能否控制这种相互作用以在停滞和湍流状态之间切换?
- 长程拓扑序的性质:在停滞状态中观察到的单向迷宫暗示了一种长程拓扑序。这种序的数学和物理性质是什么?它与其他凝聚态系统中的拓扑序有何不同,它对材料性能有何影响?
- 与玻璃系统的类比和老化:停滞壁网络的缓慢弛豫动力学与玻璃系统中的老化现象具有相似之处。能否借鉴玻璃物理学的见解来更好地理解停滞活性向列对扰动的稳定性、弛豫和响应?
- 成分耗尽的影响:本文提到在实验中观察到向列成分在缺陷处耗尽,这可能会降低缺陷能量成本。将此效应纳入未来模型可以更准确地描绘缺陷成核及其对壁网络稳定性的影响。
- 推广到三维:尽管本研究侧重于二维系统,但将其分析扩展到三维将是自然的一步。在三维活性向列中是否会出现类似的动态停滞现象或伪拓扑结构,它们的性质会有何不同?
这些未来方向强调了该领域的跨学科性质,需要理论物理学家、材料科学家和实验学家的合作,以充分揭示活性向列系统的复杂性。
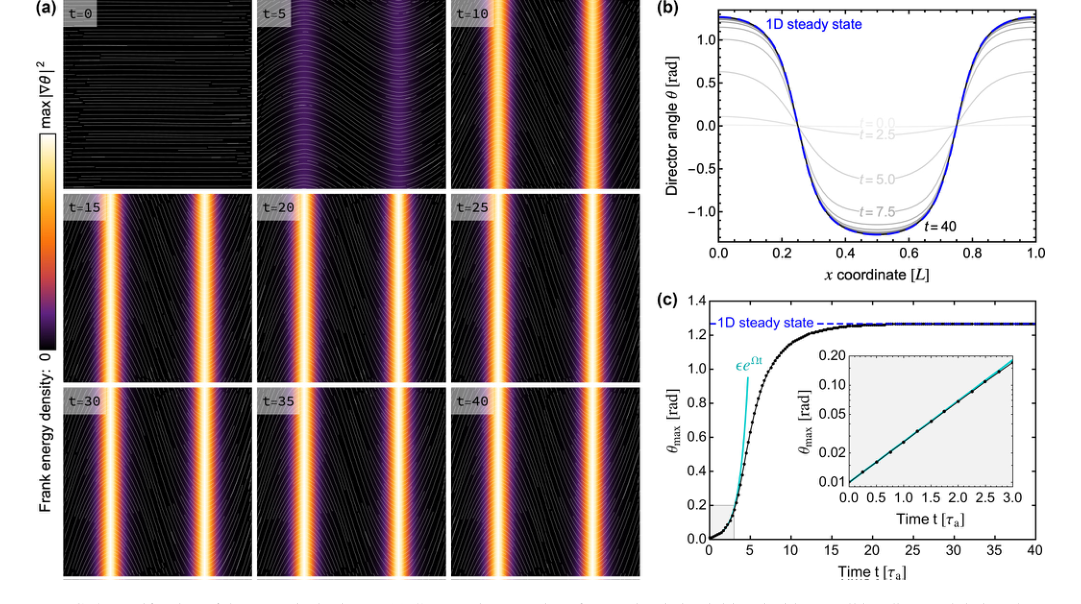 FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
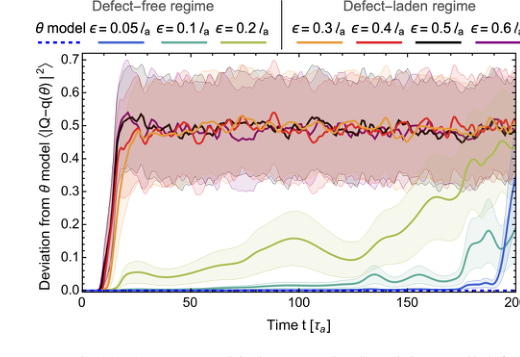 FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]
FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]