アクティブネマティック乱流における動的停止
Active fluids display spontaneous turbulentlike flows known as active turbulence.
背景と学術的系譜
起源と学術的系譜
分子モーター、細胞、あるいは合成粒子のような内部コンポーネントによって駆動される材料であるアクティブ流体の研究は、数十年にわたり活発な研究分野であった。この内部活動は自発的でしばしばカオス的な流れを生み出し、総称してアクティブ乱流と呼ばれる。この現象は、細菌懸濁液、精子、細胞骨格混合物、細胞単層、人工自己推進粒子など、多様なシステムで観察されている[1, 2-31]。歴史的に、これらの流れは、慣性が無視できる低レイノルズ数で発生するにもかかわらず、古典的な慣性乱流と驚くほど類似している。
アクティブネマティック乱流、すなわち細長い粒子が整列する傾向があるアクティブ流体の特定の種類という分野における最近の進歩は、速度パワースペクトルなどの特定の特性に対する普遍的なスケーリング則を明らかにしてきた[22,32,33]。例えば、小さな波数 $q$ における速度パワースペクトルの $q^{-1}$ スケーリングは、レイノルズ数が低く保たれる限り、粘性や活性などの特定の材料特性に依存せず、驚くほど堅牢であることが見出された[34]。この普遍的な振る舞いは、欠陥が多く存在するネマティックと欠陥が全く存在しない強く秩序だったネマティックの両方で観察された[32,33]。
しかしながら、我々の理解には重大なギャップが残っていた。これらの普遍的なスケーリング則は確立されたものの、流場場の他の非普遍的な特性に対する材料特性およびトポロジカル欠陥の有無の影響は、ほとんど探求されていなかった。この不明瞭さは根本的な限界を表していた。普遍的な側面を特徴付けることには成功した過去のアプローチは、流動配向パラメータや欠陥形成のエネルギーコストのような要因が、これらの普遍的なスケーリングを超えて複雑なパターンとダイナミクスをどのように形成するかを十分に説明していなかった。したがって、本論文は、特に欠陥のないアクティブネマティックにおける「動的停止」という、以前は見られず説明もされていなかった現象に焦点を当て、これらの非普遍的な特性を正確に調査することに動機づけられた。
直感的ドメイン用語
この論文で使用される専門用語を完全な初心者でも直感的に理解できるように、日常的な例えをいくつか示す。
- アクティブ流体: 各微細な成分(パスタの断片や野菜の粒など)が独自のミニチュアモーターを持ち、常に動き回って内部からスープをかき混ぜているスープのボウルを想像してほしい。スプーンでかき混ぜる必要がある通常のスープとは異なり、このスープは完全に自己撹拌される。
- ネマティック秩序: 背の高い草の野原を考えてほしい。通常の無秩序な状態では、草の葉はあらゆる方向に向けられているかもしれない。しかし、ネマティック秩序がある場合、ほとんどの草の葉は、まるで穏やかなそよ風に一緒に揺れているかのように、大まかに同じ方向を向く傾向がある。この好ましい集団的方向が、科学者が「ディレクター」と呼ぶものである。
- アクティブネマティック乱流: ここで、自己撹拌するスープと整列する草の葉を組み合わせる。内部モーターが非常に強力でカオス的であれば、それらは穏やかに整列するだけでなく、野生の川の急流やカオス的な煙のプルームのように、渦巻く予測不能で非常に動的な流れを生み出すが、それらはすべて成分自体によって生成される。これがアクティブネマティック乱流である。
- トポロジカル欠陥: 整列した草の野原において、トポロジカル欠陥は、草の葉が突然集団的な整列を失い、中心点を中心に渦巻いたり、相反する方向を向いたりする小さな局所的な「結び目」や「渦」のようなものである。それは、それ以外は秩序だったシステム内での激しい無秩序の点である。
- 動的停止: 常に動き、車線を変更する車で賑わう高速道路を想像してほしい。これは流動的で絶えず変化する交通パターンを生み出す。動的停止は、その交通の流れが突然、固定された、木のような「道路」と「流れ」のネットワークに落ち着くようなものである。車はこれらの経路に沿って移動し続けるが、道路ネットワーク自体の全体的な構造は安定し、劇的な進化を停止する。システムのカオス的な進化は、永続的で組織化されたパターンに「凍結」する。
記法表
| 記法 | タイプ | 説明 |
|---|---|---|
| $\mathbf{v}$ | 変数 | 流速場 |
| $\mathbf{n}$ | 変数 | ネマティックディレクター場(棒状粒子の局所平均配向) |
| $\psi$ | 変数 | 流線関数(非圧縮性流れを記述) |
| $s$ | 変数 | スカラー秩序パラメータ(局所的なネマティック整列強度を定量化) |
| $Q_{\alpha\beta}$ | 変数 | ネマティック秩序パラメータテンソル(ネマティック秩序と配向を記述) |
| $K$ | パラメータ | 弾性定数(ディレクター場の歪みに対する抵抗を測定) |
| $\eta$ | パラメータ | せん断粘性(流体のせん断流れに対する抵抗) |
| $\zeta$ | パラメータ | アクティブ応力パラメータ(内部アクティブ駆動の強度) |
| $v$ | パラメータ | 流動配向パラメータ(せん断下でのネマティックの再配向傾向) |
| $\gamma$ | パラメータ | 回転粘性(ディレクター場の回転に対する抵抗) |
| $A$ | パラメータ | アクティビティ数(システムサイズに対するアクティブ強制の無次元量) |
| $R$ | パラメータ | 粘性比(回転粘性とせん断粘性の比、$\gamma/\eta$) |
| $S$ | パラメータ | アクティブ応力の符号(伸長性/収縮性システムに対して $\pm 1$) |
| $\epsilon$ | パラメータ | 欠陥コアサイズ(トポロジカル欠陥コアの特性サイズ) |
問題定義と制約
中心的な問題定式化とジレンマ
本論文は、内部駆動コンポーネントが自発的でカオス的な流れを生み出す現象であるアクティブネマティック乱流の理解における重大なギャップに対処する。以前の研究では、アクティブネマティック乱流の速度パワースペクトルが、材料特性やトポロジカル欠陥の有無にほとんど依存しない普遍的なスケーリング則を示すことが確立されていた。しかし、材料特性およびトポロジカル欠陥の非存在が、これらの流れの非普遍的な特性に及ぼす正確な影響は、ほとんど探求されていなかった。
本論文の出発点(入力/現在の状態)は、アクティブネマティック乱流、特に「欠陥のない」領域である。この欠陥のない状態は、明示的なモデル構築(ディレクター場が固定されたモジュラスを持ち、欠陥形成を排除するディレクターベースモデル)または、欠陥コアのエネルギーコストが法外に高い条件(小さな欠陥コアサイズを持つQテンソルモデル)のいずれかによって達成される。システムは、アクティブ応力パラメータ $\zeta$ や、液晶がせん断下で再配向する傾向を記述する流動配向パラメータ $v$ などのパラメータによって特徴付けられる。
望ましい終点(出力/目標状態)は、流動配向パラメータ $v$ とトポロジカル欠陥の抑制が、アクティブネマティック流れの時空間構造とダイナミクスにどのように影響するかについての包括的な理解である。著者らは、欠陥が存在する場合に通常観察されるカオス的な流れとは異なる、欠陥のないアクティブネマティック乱流に出現する新しい「停止パターン」を明らかにし、特徴付けることを目指している。最終的な目標は、この「動的停止」の根本的なメカニズム、特にそれがネマティック領域壁の創発的な有効トポロジーとその接続規則からどのように生じるかを解明することである。
本論文が橋渡ししようとしている正確な欠落リンクまたは数学的ギャップは、流動配向、アクティブ応力、およびトポロジカル欠陥の非存在の間の相互作用を体系的に探求し、秩序だった停止状態のアクティブ乱流内での出現を説明できる理論的および計算的フレームワークの欠如である。普遍的なスケーリング則は知られていたが、欠陥のないシステムにおける特定の非普遍的なパターンとダイナミクスは、ほとんど特徴付けられていなかった。本論文は、これらの要因がカオス的な乱流から動的に停止した状態への遷移をどのように引き起こすかについて、詳細な数学的および物理的説明を提供しようとしている。
この特定の問題を解決しようとする過去の研究者を閉じ込めてきた痛みを伴うトレードオフまたはジレンマは、アクティブ乱流の本質そのものにある。アクティブ乱流は、しばしば永続的でカオス的な渦支配の流れによって特徴付けられ、トポロジカル欠陥がこれらのカオスの主要な駆動因子および組織化因子として頻繁に機能する。ジレンマは、欠陥が無秩序の原因であると同時に、特定の領域で持続的な乱流を可能にするということである。本論文は、伸長性棒状ネマティックにおいて、トポロジカル欠陥の非存在が、より単純な形態の乱流につながるのではなく、「動的停止」をもたらすことを明らかにしている。これは、カオスの源(欠陥)を取り除くことが、必ずしもより秩序だった乱流状態につながるのではなく、完全に異なる、停止した、より動的でない領域につながるという直感に反するトレードオフを示唆している。これは、欠陥が単に破壊的であるという従来の考え方に挑戦し、持続的な乱流ダイナミクスにおけるそれらの役割を強調している。
制約と失敗モード
動的停止のアクティブネマティック乱流における理解という問題は、いくつかの過酷で現実的な制約によって極めて困難になっている。
-
物理的/材料的制約:
- 欠陥フリー要件: 「欠陥フリー」アクティブネマティック乱流への中心的な焦点は、重大な制約である。トポロジカル欠陥はほとんどのアクティブネマティックシステムに普遍的に存在し、しばしばカオス的な流れの主要な駆動因子である。実験的に真に欠陥フリーのアクティブネマティックシステムを実現し維持することは極めて困難である。本論文は、ディレクター場が固定されたモジュラス $|n|=1$ を持ち、欠陥形成を排除するディレクターベースモデル、または欠陥コアに関連するエネルギーコストが法外に高い条件(小さな欠陥コアサイズを持つQテンソルモデル)で使用することで、これを対処している。
- パラメータ感度: 動的停止の発生は、材料特性、特に流動配向パラメータ $v$ とアクティブ応力パラメータ $\zeta$ の相互作用に非常に敏感である。停止状態は、伸長性配向領域 ($\zeta v < 0$、棒状ネマティックで $v \le 0$)でのみ観察される。これは、この現象がすべてのアクティブネマティックシステムに普遍的ではなく、特定の狭いパラメータ空間に限定されることを意味する。
- 低レイノルズ数: 理論的フレームワークとシミュレーションは厳密に「レイノルズ数ゼロ」で実行される。これは慣性効果が無視できることを意味する。これは流体力学を単純化するが、慣性が重要な役割を果たすシステムへの知見の直接的な適用性を制限し、流れのパターンと安定性を変化させる可能性がある。
- 欠陥コアサイズ閾値: より一般的なQテンソルモデルでは、欠陥コアサイズ $\epsilon$ とアクティブ長 $l_a$ の比が重要な制御パラメータである。動的停止は、$\epsilon \ll l_a$ の場合にのみ持続する。これは欠陥核生成がエネルギー的に抑制されることを意味する。$\epsilon$ が臨界閾値(固定 $Sv = -1$ で約 $0.25 l_a$)を超えると、欠陥が核生成し、停止状態の崩壊と欠陥が多く存在する乱流への遷移を引き起こす。これは現象を観察するための厳密な物理的条件を課す。
-
計算的制約:
- 大規模シミュレーション: 創発的なパターンと動的停止の長期的なダイナミクスを観察するには、「大規模数値シミュレーション」が必要である。これは、特に異なるパラメータ領域とシステムサイズを探索する場合、かなりの計算コストと時間を要する。
- Qテンソルモデルの数値的剛性: 完全なQテンソルモデル、特に小さな欠陥コアサイズ ($\epsilon \to 0$) の極限でのシミュレーションは、「ますます剛性が高く計算コストが高くなる」。この剛性は、潜在的な欠陥コアに関連する急峻な勾配と小さな長さスケールを解決する必要性から生じ、この極限ではより単純なディレクターベースモデルがより実用的な代替手段となる。
- 複雑なハイブリッド数値スキーム: シミュレーションは、運動量バランスのための擬スペクトル法と角度場進化のための有限要素法を組み合わせた洗練されたハイブリッド数値スキームを採用している。特性-ガラーキン法(対流項)、陰的処理(ラプラシアン項)、およびアダムス・バッシュフォース法(時間進化)などの技術を含むこの複雑なセットアップは、関与する多様な物理現象全体で数値的安定性と精度を確保するために必要である。
- システムサイズ制限: 著者らは停止の持続性をテストするために「さらに大きなシステムサイズ」でシミュレーションを実行したが、これらは「実質的に大きな計算努力を必要とした」。これは、計算リソースがこれらの現象を研究できる規模に実用的な制限を課していることを示唆しており、真のマクロシステムにおける非常に長距離の相関または停止状態の安定性の観察に影響を与える可能性がある。
-
データ駆動型/実験的制約:
- 実験的検証の欠如: 主要な制約は、「欠陥フリーアクティブネマティックに関する我々の予測の検証は実験的な課題を提示する」ことである。なぜなら、「動的停止—我々の主要な予測—はまだ実験的に実現されていない」からである。擬似欠陥や迷宮パターンなどの一部の要素が観察されているが、永続的なシステム全体に広がる停止状態は実験では依然として捉えどころがない。これは、現在研究されているシステムよりも欠陥核生成が大幅にコストがかかる新しいアクティブ材料の探索を必要とする。
- 欠陥制御の困難さ: 実験的なアクティブネマティックシステムでトポロジカル欠陥を正確に制御または抑制する能力は、大きな障害である。ほとんどの実験セットアップは本質的に欠陥を生成するため、モデルによって予測された欠陥フリー領域を分離して研究することが困難である。
なぜこのアプローチなのか
選択の必然性
著者らがディレクターベースの欠陥フリーモデルを選択したのは、単なる好みではなく、彼らが解決しようとしていた問題、すなわちトポロジカル欠陥の非存在下での「アクティブネマティック乱流における動的停止」を理解するという問題によって dictat された必然性であった。従来の「SOTA」(State-Of-The-Art)手法、例えば標準的なQテンソルモデルは、ほとんどのアクティブネマティックシステムに普遍的なトポロジカル欠陥の核生成とダイナミクスを考慮するように設計されている。しかし、この論文の核心的な新規性は、これらの欠陥がエネルギー的に抑制されるか、あるいは構築によって完全に排除される領域を探求することにある。
著者らが従来のモデルが不十分であると認識した正確な瞬間は、欠陥フリー状態を調査することにしたときであった。彼らが選択したモデルは、以前の最小モデル[33]の一般化であり、ネマティックディレクター場のモジュラス $|n|=1$ を明示的に固定している。この制約は、セクションIIで述べられているように、「トポロジカル欠陥の生成を排除する[33,38]」。この意図的な設計選択は、動的停止という現象、すなわち安定した木のような領域壁パターンによって特徴付けられる現象が、移動可能なトポロジカル欠陥によって根本的に変化するか、あるいは完全に妨げられるため、不可欠であった。欠陥のない環境を保証するモデルなしでは、この新しい停止状態を分離し特徴付けることは不可能であっただろう。Qテンソルモデルはより一般的であるが、著者らが明らかにしたい特定のダイナミクスを不明瞭にする欠陥を導入しただろう。
比較優位性
単純な性能指標を超えて、ディレクターベースの欠陥フリーモデルは、この特定の研究課題に対して、質的に深い優位性を提供する。その構造的利点は、トポロジカル欠陥のカオス的なダイナミクスによってマスクされている現象を分離し、強調する能力にある。
- 動的停止の解明: 最も重要な質的利点は、「動的停止」状態自体を解明する能力である。伸長性配向ネマティック ($S\nu < -1$) では、モデルはネマティック領域壁が「それらが引き込む流れによって強く安定化され」、結果として「空間を埋める木のようなパターン」になることを示す[図1(d)-1(f)]。この停止状態は、他の方法で研究されてきたカオス的で欠陥の多い乱流とは異なる、新しい発見である。
- 高次元ノイズと長期安定性の処理: 停止領域は、「はるかに弱い」大規模カオス流と、「特に大規模でのネマティックテンソル場の相関時間がはるかに長い」ことを示す[図1(i)、青]。これは、安定した長寿命の構造とダイナミクスを捉える質的な優位性を示しており、欠陥のあるシステムにおける高次元ノイズと短い相関時間によってしばしば圧倒される。モデルは、欠陥ダイナミクスからの「ノイズ」を効果的に低減し、根本的なパターン形成メカニズムが明確に現れるようにする。
- ターゲット領域における計算効率: 主な焦点ではないが、論文は実用的な利点を指摘している。セクションV.AでQテンソルモデルについて議論する際、著者らは「この極限(小さな欠陥コアサイズ)では、Qテンソルシミュレーションはますます剛性が高く計算コストが高くなるため、$\theta$ モデルがより効率的で実用的な代替手段となる」と述べている。欠陥フリー領域(これは非常に小さな欠陥コアサイズに対応する)では、ディレクターベースモデルは計算コストと安定性の点で圧倒的に優れており、停止状態のより広範なシミュレーションを可能にする。
制約との整合性
選択されたディレクターベースモデルは、トポロジカル欠陥によって導入される複雑さを伴わずにアクティブネマティック乱流を研究するという暗黙の制約と完全に整合している。問題の過酷な要件と解決策のユニークな特性との「結婚」は、いくつかの点で明らかである。
- 強制的な欠陥フリー状態: 最も重要な制約は、トポロジカル欠陥の不存在である。モデルの定式化は、ディレクター場モジュラスを $|n|=1$ に固定することによって、本質的に欠陥核生成を防止する[33,38]。これは直接的かつ完璧な整合であり、観察された現象がアクティビティ、流動配向、およびネマティック弾性の相互作用のみによるものであり、欠陥ダイナミクスによるものではないことを保証する。
- 流動配向への焦点: 本論文の目標は、「流動配向パラメータ $\nu$」がアクティブネマティック乱流にどのように影響するかを調査することである。エリクセン-レスリー液晶モデルは、彼らのアプローチの基礎を形成しており、このパラメータを自然に組み込んでいるため、流れの時空間構造と動的停止の出現に対するその影響を直接研究できる。
- 明確性のためのミニマリストアプローチ: 欠陥ダイナミクスの複雑さを排除することにより、モデルはミニマリストアプローチに従い、パターン形成と停止の根本的なメカニズムの明確な特定を可能にする。これは、ゼロベースの読者に複雑な現象を直感的に説明するという目標に沿っている。モデルは、欠陥が存在しない場合に発生する根本的に異なる挙動を強調するために、システムを単純化する。
代替案の却下
本論文は、特に欠陥フリーアクティブネマティックの初期調査のための主要なツールとして、完全なQテンソルモデルを含む代替アプローチを暗黙的かつ明示的に却下している。この却下の理由は、多岐にわたり明確である。
- 計算コストと剛性: セクションV.Aで述べられているように、欠陥コアサイズ $\epsilon$ が非常に小さい場合(欠陥フリー極限に近づく)、「Qテンソルシミュレーションはますます剛性が高く計算コストが高くなる」。欠陥がエネルギー的に抑制されているか存在しない領域では、ディレクターベースの $\theta$ モデルは「より効率的で実用的な代替手段」である。これは、この特定の問題に対する主なアプローチとしてQテンソルモデルを使用しない強力な実用的な理由である。
- 欠陥の混同効果: 主要な目的は、トポロジカル欠陥の非存在下での現象を研究することであった。Qテンソルモデルは、設計上、欠陥核生成とダイナミクスを可能にする。このようなモデルを使用すると、欠陥フリー環境における動的停止につながる特定のメカニズムを分離することが困難になる追加の複雑さの層が導入されるだろう。著者らは、「アクティブネマティックにおけるほとんどの実験とシミュレーションは、欠陥が多く存在する領域で行われてきた」(セクションVII)と明示的に述べており、これらの以前のアプローチは彼らの新しい欠陥フリー研究には適していなかったことを示唆している。
- 検証、置き換えではない: QテンソルモデルはセクションVで、彼らの欠陥フリーの発見が適用可能な領域を「区分けし、(2)それらの条件がもはや満たされなくなったときに生じる、より馴染みのある欠陥が多く存在する挙動への遷移を探求する」ために、置き換えではなく、文脈を広げるために導入されている。これは、Qテンソルモデルが欠陥フリー状態自体の初期の集中的な研究には理想的なツールではないが、欠陥フリーの発見を文脈化し、遷移を探求するための貴重なツールとして機能することを示している。本論文は、$\theta$ モデルが欠陥フリー極限でQテンソルモデルに収束することを示しており、この極限における単純なモデルの妥当性を確認している。欠陥の効果を他のパラメータの効果から分離する能力は、論文の発見にとって重要である。
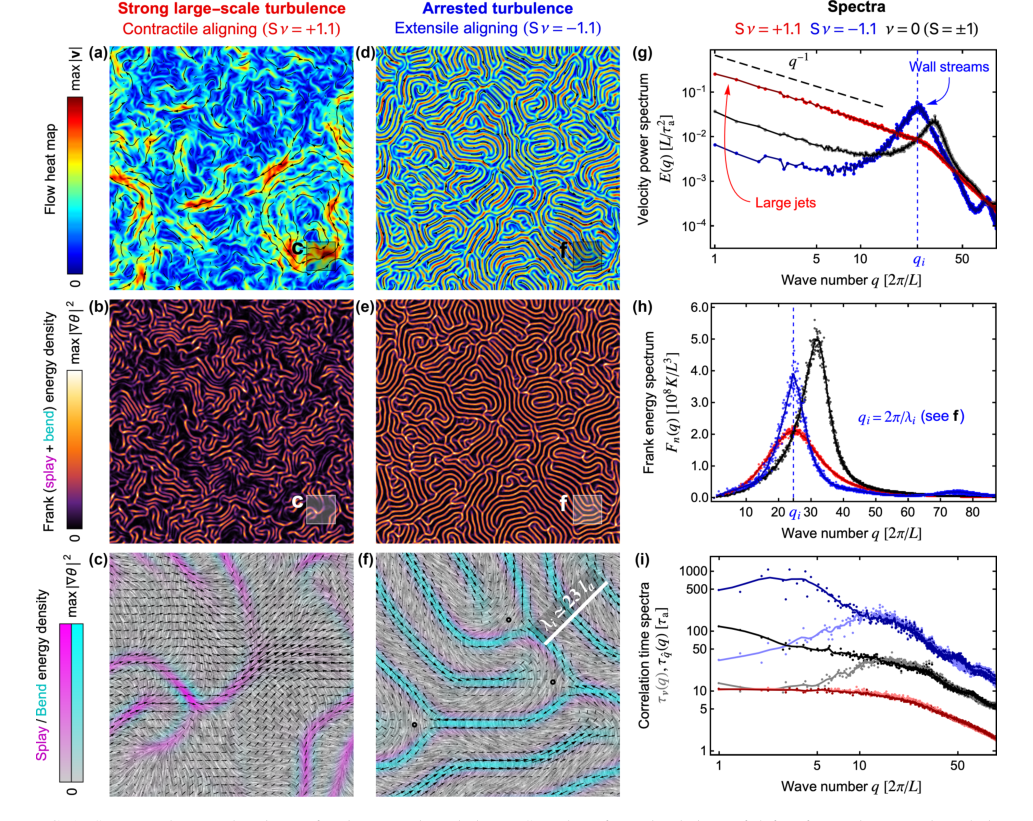 FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
数学的および論理的メカニズム
マスター方程式
アクティブネマティック乱流の根本的な振る舞い、特に本論文で研究されている欠陥フリー領域では、流体流れとネマティック液晶の配向との相互作用によって支配される。この相互作用は、2つの連立偏微分方程式によって捉えられる。1つは流体の運動量バランスを記述し、無次元化してその回転を取ると、流線関数に対するポアソン方程式になる。もう1つはネマティックディレクター場のダイナミクスを記述する。
無次元化された運動量バランス方程式(レイノルズ数ゼロでのナビエ・ストークス様方程式の回転を取って得られる)は次のとおりである。
$$
\nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) \quad \text{(6)}
$$
無次元化されたディレクターダイナミクス方程式(ネマティック配向が時間とともにどのように変化するかを記述する)は次のとおりである。
$$
\partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi \quad \text{(8)}
$$
これら2つの方程式、(6)と(8)は、欠陥フリーアクティブネマティックモデルの数学的エンジンを形成する。それらは、流体流れ($\psi$ で表される)がネマティックディレクター($\theta$)に影響を与え、ネマティックディレクターの配置が流体流れに影響を与えるため、連立している。
項ごとの解剖
これらのマスター方程式の各成分を分解して、その数学的意味と物理的役割を理解しよう。
方程式 (6): 運動量バランス
$$ \nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) $$
-
$\nabla^4\psi$:
- 数学的定義: これは流線関数 $\psi$ に作用するバイラプラシアン演算子である。これは $\nabla^2(\nabla^2\psi)$ に等しい。$\omega = -\nabla^2\psi$(渦度)であるため、この項は実質的に $-\nabla^2\omega$ である。
- 物理的/論理的役割: 流体力学では、この項は渦度の粘性散逸を表す。これは減衰機構として機能し、流体流れの変化に抵抗し、速度勾配を平滑化する傾向がある。$\nabla^2$(単なる $\nabla^2$ ではなく)の使用は、運動量バランス方程式の回転を2回取って圧力を排除し、すべてを流線関数で表現することから生じる。
- なぜ $\nabla^4$ か: この演算子は、流線関数で表現されたストークス方程式(低レイノルズ数での運動量バランス)の回転を取ることから自然に現れる。これは流体流れが非圧縮性であることを保証し、粘性力を考慮する。
-
$S$:
- 数学的定義: 無次元パラメータ、$S = \text{sign}(\zeta)$、ここで $\zeta$ はアクティブ応力パラメータである。
- 物理的/論理的役割: このパラメータはアクティブ応力の性質を決定する。伸長性応力(例:棒状成分が外側に押し出す)の場合は $S = +1$、収縮性応力(例:モータータンパク質が引き込む)の場合は $S = -1$ である。これはシステムの振る舞いの主要な制御パラメータであり、システムが強い乱流を示すか動的停止を示すかに影響を与える。
- なぜ符号か: 符号は、アクティブ成分が応力を生成する方法の根本的な違いを捉え、結果として生じる流れのパターンに大きな影響を与える。
-
$\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$:
- 数学的定義: これはネマティック配向テンソル $\tilde{g}_{\alpha\beta}$ の発散である。テンソル $\tilde{g}_{\alpha\beta}$ は $\tilde{g}_{\alpha\beta} = n_\alpha n_\beta - \frac{1}{2}\delta_{\alpha\beta}$ と定義される。ここで $n_\alpha$ はネマティックディレクター $\mathbf{n} = (\cos\theta, \sin\theta)$ の成分であり、$\delta_{\alpha\beta}$ はクロネッカーデルタである。
- 物理的/論理的役割: この項は、ネマティック成分によって生成されるアクティブ応力を表す。アクティブネマティックは化学エネルギーを機械的仕事に内部的に変換し、流体流れを駆動する応力を生成する。$\tilde{g}_{\alpha\beta}$ の発散は、これらの応力がどのように分布し、流体運動をどのように駆動するかを捉える。
- なぜ発散か: 応力テンソル($\sigma^A$ のような)の発散は、その応力が流体に及ぼす力密度を表す。これは応力を流体運動量に結合する標準的な方法である。
-
$R$:
- 数学的定義: 無次元粘性比、$R = \gamma/\eta$。
- 物理的/論理的役割: このパラメータは、ネマティックディレクターの回転粘性 ($\gamma$) と流体のせん断粘性 ($\eta$) を比較する。これは、流れや弾性トルクに応答してネマティックディレクターがどれだけ容易に再配向するかを影響する。
- なぜ比か: システム内の2種類の粘性抵抗を比較しているため、ディレクター回転と流体流れの間のバランスを理解する上で重要である。
-
$\nu$:
- 数学的定義: 無次元流動配向パラメータ。
- 物理的/論理的役割: このパラメータは、液晶ディレクターがせん断流れの下で再配向する傾向を特徴付ける。$\nu < 0$ の場合、ネマティックは流れに沿って整列する傾向がある(流動配向領域)。$\nu > 0$ の場合、タンブリングする傾向がある(タンブリング領域)。このパラメータは、動的停止に関する論文の発見の中心である。
- なぜ係数か: これは流動配向効果の強度をスケーリングする係数であり、液晶の重要な材料特性である。
-
$\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp)$:
- 数学的定義: これは流動配向とエリクセン応力から生じる応力の発散を表す。$h_\parallel$ と $h_\perp$ は配向場 $h_\alpha$ の成分であり、式(7)で $h_\parallel = \frac{1}{A}\nabla^2\theta$ および $h_\perp = \nu(\sin 2\theta d_1\psi + \cos 2\theta d_2\psi)$ と定義されている。ここで $d_1 = \frac{1}{2}(\partial_x^2 - \partial_y^2)$ および $d_2 = \partial_x\partial_y$ である。完全な $h_\alpha$ はディレクターに対する弾性トルクである。
- 物理的/論理的役割: この項は、弾性応力(エリクセン応力)と流動配向による応力を表す。弾性応力はネマティックディレクター場の歪みから生じ、流動配向はネマティックディレクターが流体の伸長流に応答して再配向する様子を記述する。これらの応力は流体運動量バランスにフィードバックし、流体場に影響を与える。
- なぜ差か: $\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp$ という特定の組み合わせは、弾性トルクと流動配向からの寄与を含む、偏差応力テンソルの対称部分(式4)から生じる。このテンソルの発散は、流体に対する力密度を表す。
方程式 (8): ディレクターダイナミクス
$$ \partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi $$
-
$\partial_t\theta$:
- 数学的定義: 時間 $t$ に対するネマティック角度 $\theta$ の偏微分。
- 物理的/論理的役割: これは時間発展項であり、空間のある点におけるネマティックディレクターの配向がどれだけ速く変化するかを表す。これはダイナミクスの核心である。
- なぜ微分か: 状態変数の変化率を捉える、あらゆる動的方程式の基本的な構成要素である。
-
$\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$:
- 数学的定義: これは対流項であり、流体流れによるネマティック角度 $\theta$ の移流を表す。$\epsilon_{\alpha\beta}$ はレビ・チビタ(完全反対称)テンソルであり、$\partial_\alpha\psi$ は流速 $\mathbf{v}$ の成分を表す。
- 物理的/論理的役割: この項は、ネマティックディレクターが流体流れによってどのように運ばれるかを記述する。流体要素が移動すると、そのネマティック配向も一緒に運ばれる。これはディレクターダイナミクスと流体速度を連立させる重要な非線形項である。
- なぜ $\epsilon_{\alpha\beta}$ と乗算か: レビ・チビタテンソルは、流線関数の回転を形成するために使用され、速度成分を与える。項 $\mathbf{v} \cdot \nabla\theta$ は物質微分を表し、局所的な時間発展と流れによる輸送の両方による変化を捉える。
-
$\frac{1}{A}\nabla^2\theta$:
- 数学的定義: ネマティック角度 $\theta$ のラプラシアンを、アクティビティ数 $A$ の逆数でスケーリングしたもの。
- 物理的/論理的役割: この項は、ネマティックディレクター場の空間的な変化(歪み)に抵抗する弾性トルクを表す。これは配向の急激な変化を平滑化する傾向があり、復元力のように機能する。アクティビティ数 $A = L^2/l_a^2$ は、システムサイズ $L$ とアクティブ長 $l_a = \sqrt{K/(|\zeta|R)}$(アクティブ応力とネマティック弾性応力のバランス)を比較する。大きな $A$ は、弾性力がアクティブな力に対して相対的に弱いことを意味する。
- なぜ $\nabla^2$ か: ラプラシアンは、空間勾配を最小化しようとする拡散または弾性力を表す標準的な数学的演算子である。
-
$h_\parallel$:
- 数学的定義: 配向場 $h_\alpha$ の平行成分であり、フランク自由エネルギーに関連している。具体的には、$h_\parallel = \frac{1}{A}\nabla^2\theta$(式(7)および式(8)の文脈から)。
- 物理的/論理的役割: この項は、ディレクターに作用する弾性トルクを表し、弾性歪みを最小限に抑える状態に向かわせる。これは左辺の $\frac{1}{A}\nabla^2\theta$ 項と同じ弾性復元力であるが、ここではソース項として明示的に示されている。式(8)における論文の定式化は、実質的に弾性トルク項を組み合わせている。
- なぜ加算か: 右辺の項はディレクター回転のソースまたはシンクであり、$\theta$ の全体的な変化に寄与する。
-
$\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$:
- 数学的定義: 流動配向パラメータ $\nu$ とネマティック配向テンソル $\tilde{g}_{\alpha\beta}$ および流線関数 $\psi$ の2階微分を含む、流動配向項。
- 物理的/論理的役割: この項は、伸長流(せん断)によるネマティックディレクターの再配向を記述する。これは、流体の変形場($\partial_\alpha\partial_\beta\psi$ に関連)がネマティックロッドをどのように整列またはタンブルさせるかを捉える。これは重要な連立項である。
- なぜ乗算か: これは、流動配向パラメータ、ネマティック配向、およびひずみ率テンソル($\partial_\alpha\partial_\beta\psi$ から導出される)の積であり、これらの要因が組み合わさって再配向トルクを生成する方法を反映している。
主要な無次元パラメータ:
- $L$: システムサイズ(長さスケール)。
- $\tau_a = \eta/|\zeta|$: アクティブ時間スケール。
- $K$: フランク弾性定数。
- $\eta$: せん断粘性。
- $\gamma$: 回転粘性。
- $\zeta$: アクティブ応力パラメータ。
- $A = L^2/l_a^2 = RL^2|\zeta|/K$: アクティビティ数。システムサイズとアクティブ長 $l_a$ を比較する。大きな $A$ は、弾性抵抗に対するアクティブな強制力が強いことを示す。
- $R = \gamma/\eta$: 粘性比。
- $\nu$: 流動配向パラメータ。
ステップバイステップの流れ
ある特定の場所と時間におけるアクティブネマティックシステムの状態を表す、単一の抽象的なデータポイントを想像してほしい。この状態は主に局所的なネマティックディレクター角度 $\theta$ と流線関数 $\psi$ によって定義される。システムは、これらのデータポイントを処理する機械的な組み立てラインのように、数値シミュレーションを通じて反復的に進化する。
-
初期状態入力: ある時間ステップ $n$ で、全空間グリッドにわたる現在のネマティック角度場 $\theta^n$ と流線関数場 $\psi^n$ が存在する。
-
運動量バランス計算(方程式6 / A1):
- システムはまず流体流れの更新に焦点を当てる。現在のネマティック角度 $\theta^n$ を取り込み、アクティブ応力($S(d_1 \sin 2\theta^n + d_2 \cos 2\theta^n)$ 項)と流動配向/エリクセン応力($-\frac{R\nu}{A}(d_1 \cos 2\theta^n \nabla^2\theta^n - d_2 \sin 2\theta^n \nabla^2\theta^n)$ 項、これは(A1)の右辺の一部)を計算するために使用する。これらの項は、流体を駆動する「強制関数」として機能する。
- これらの強制関数は、$\psi$ に対するバイラプラシアン方程式である運動量バランス方程式に投入される。これは擬スペクトル法を使用して解かれる。これは、空間微分がフーリエ空間で非常に効率的に計算されることを意味する。
- 特に、(A1)の左辺の $G(\theta^n, \psi^n)$ 項(流動配向応力の一部)は $\psi$ 自体に依存する。これを処理するために、不動点反復が使用される。$\psi$ の初期推測値(通常は前の時間ステップの値)が $G$ を計算するために使用され、次に新しい $\psi$ が解かれる。このプロセスは、計算された $\psi$ が現在の時間ステップの安定した値に収束するまで繰り返され、流れとそれが生成する応力の間の自己整合性が保証される。
- $\psi^n$ が決定されると、速度成分 ($v_x, v_y$)、渦度 ($\omega$)、および流動配向回転 ($C^n$) のような補助的な流れ場が $\psi^n$ から計算される。
-
ディレクターダイナミクス計算(方程式8 / A4):
- 次に、システムはネマティックディレクターの更新に注意を向ける。新しく計算された流れ場 ($v_x, v_y$) と現在のネマティック角度 $\theta^n$ を取る。
- ディレクターダイナミクス方程式(8)は、$\theta$ がどのように変化するかを記述する。対流項 ($\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$) は、ディレクターが流体流れによってどのように移流されるかを決定する。弾性項 ($\frac{1}{A}\nabla^2\theta$) は、ディレクター歪みを平滑化しようとする。右辺の項 ($h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$) は、伸長流による弾性トルクと再配向を表す。
- この方程式は有限要素法を使用して解かれる。対流項は、安定性のために特性-ガラーキン法を使用して別途処理され、実質的に流体要素の経路を追跡する。弾性(ラプラシアン)項は陰的に処理され、これは数値的安定性を確保するために、新しい $\theta^{n+1}$ と同時に解かれることを意味する。特に剛性の高い問題(注意深く処理されないと急激な変化を引き起こす可能性のある弾性力のような)に対して。
- 結果として、更新されたネマティック角度場 $\theta^{n+1}$ が得られる。
-
時間ステップの進行: システムは次に時間を $n$ から $n+1$ にインクリメントし、プロセス全体が繰り返され、新しい入力として $\theta^{n+1}$ と $\psi^{n+1}$ が使用される。
この反復的で連立したプロセスにより、システムは進化し、流体流れとネマティック配向は互いに継続的に影響を与え合い、アクティブ乱流や停止パターンなどの複雑なパターンと動的状態につながる。
最適化ダイナミクス
この文脈における「最適化ダイナミクス」は、従来の機械学習の最適化(損失関数を最小化する勾配降下法のような)というよりも、数値解の反復とシステムが安定または準安定状態に向かって長期的に進化することに、より関連している。
-
各時間ステップでの数値的収束:
- 流線関数に対する不動点反復: 各時間ステップ内で、流線関数 $\psi$ の運動量バランス方程式(A1)は不動点法を用いて反復的に解かれる。これは、$\psi$ の初期推測値が非線形項を計算するために使用され、次に新しい $\psi$ が計算されることを意味する。この新しい $\psi$ が次の反復の入力となり、プロセスは successive $\psi$ 解の差が小さな計算許容値(例:$10^{-8}$)を下回るまで繰り返される。これにより、流体流れ場が、その瞬間のネマティックディレクターによって生成される応力と自己整合性が保証される。ここでの「損失地形」は方程式の残差誤差であり、反復は「最小値」(ゼロ残差)を見つけることを目指す。
- ディレクターダイナミクスのための陰的処理: ディレクターダイナミクス方程式(A4)では、ラプラシアン(弾性)項は陰的に処理される。これは、次の時間ステップでの $\theta$ の値、すなわち $\theta^{n+1}$ が、$\theta^n$ から明示的に計算されるのではなく、直接解かれることを意味する。このアプローチは、特に剛性の高い項(注意深く処理されないと急激な変化を引き起こす可能性のある弾性力のような)を扱う場合に、数値的安定性を向上させる。これは、現在の流れを考慮して方程式を満たす安定した $\theta^{n+1}$ に実質的に「収束」する。
-
物理システムの進化と「学習」:
- 反復的な状態更新: シミュレーション全体は、フィールド $\theta$ と $\psi$ を時間ステップごとに反復的に更新することによって進行する。流れとディレクターダイナミクスの間のこの継続的なフィードバックループは、システムの進化を駆動する。
- 損失地形(暗黙的): 明示的な損失関数として定義されてはいないが、システムのダイナミクスは、複雑な「エネルギー地形」(例:フランク自由エネルギー、バルク自由エネルギー)をナビゲートしていると考えることができる。システムは自然に、これらのエネルギーを最小化する状態に進化するか、アクティブシステムでは、動的に維持される非平衡状態に到達する。
- 勾配と駆動力: 方程式の様々な項は、「勾配」または駆動力として機能する。例えば、アクティブ応力項 ($S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$) は流体運動を駆動し、弾性項 ($\nabla^2\psi$ および $\nabla^2\theta$) は歪みを平滑化しようとする復元力として機能する。流動配向項 ($\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$) は、ディレクターが流れに応答してどのように再配向するかを決定し、システムの応答を形成する。
- 動的停止への収束: 本論文の中心的な発見は、特定のパラメータ領域(例:伸長性配向ネマティック、$S\nu < -1$)では、システムが動的停止状態に「収束」することである。これはグローバル最小値を見つけるという意味での最適化ではなく、むしろシステムが安定した非平衡パターン(領域壁の木のようなネットワーク)に落ち着き、そこでカオス的な流れが抑制され、ダイナミクスがガラス系における老化現象に似た非常に遅い状態になることである。システムは、アクティブな強制、粘性散逸、弾性トルク、および流動配向の継続的な相互作用を通じて、これらの安定したパターンを形成することを「学習」する。勾配は効果的にシステムをこれらの停止構成に導く。
- ノイズの役割: ディレクターダイナミクス(Appendix A.4)に小振幅のガウス白色ノイズが追加され、完全に発達したアクティブ乱流への進化が加速される。このノイズは摂動として機能し、システムが「地形」を探索し、潜在的な局所的最小値または準安定状態から脱出するのを助け、特性的な乱流または停止領域に到達することを保証する。
本質的に、「最適化」とは、アクティブな力によって駆動され、材料特性によって制約されるこれらの支配方程式の下で、物理システムが自然に進化し、特性的な動的または停止状態に到達する傾向である。数値方法は、この進化が正確かつ安定してシミュレートされることを保証する。
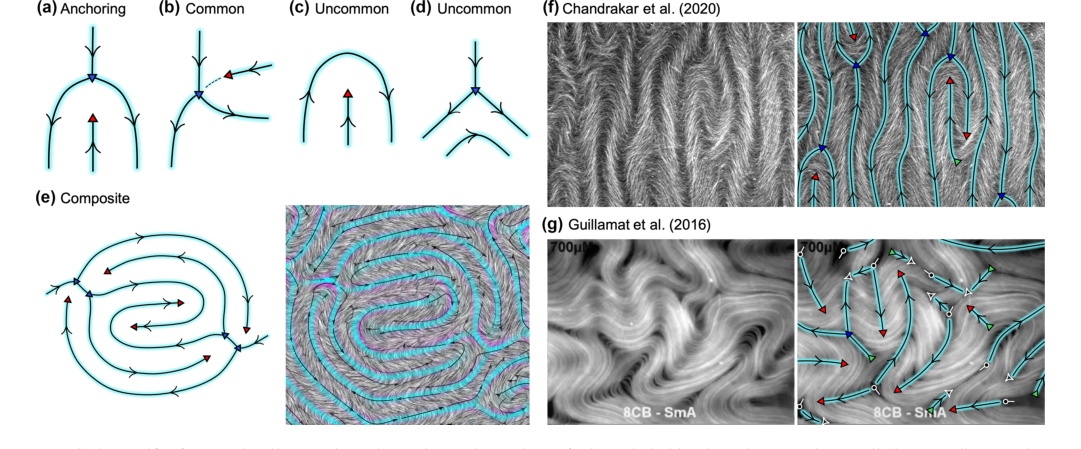 FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
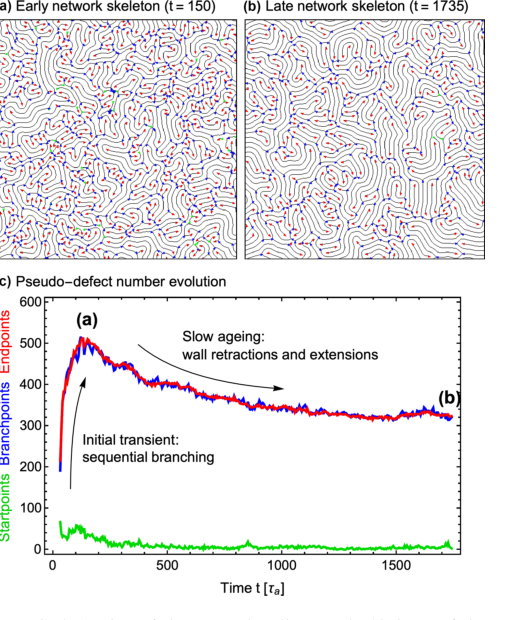 FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
結果、限界、および結論
実験設計とベースライン
著者らは、アクティブネマティック乱流のダイナミクス、特にトポロジカル欠陥と流動配向の役割を厳密に調査するために、数値実験を細心の注意を払って設計した。彼らの主なツールは大規模数値シミュレーションであり、2つの主要なモデルが採用された。
第一に、流動配向とエリクセン応力を組み込むことで、以前の研究を一般化したディレクターベースの欠陥フリーモデルが使用された。このモデルは、方程式(6)-(8)によって支配され、固定モジュラスを持つ連続的なディレクター場を強制することにより、本質的にトポロジカル欠陥の形成を排除する。この構造的な選択は、欠陥の影響を排除して領域壁のダイナミクスを分離するために重要であった。このモデルの主要な無次元パラメータには、アクティビティ数 $A = L^2/l_a^2$、粘性比 $R = \gamma/\eta$、および流動配向パラメータ $\nu$ が含まれる。ほとんどのシミュレーションでは、$R=1$ および $A=3.2 \times 10^5$ が設定され、これは $\nu=0$ の場合に大規模アクティブ乱流を示す領域である。実験は、2つの異なる領域を比較するように特別に設計された。
1. 収縮性配向性(Sv > 1): $S=-1$(収縮性応力)および $\nu=-1.1$(流動配向性ロッド)で例示される。これは「強い大規模乱流」のベースラインとして機能した。
2. 伸長性配向性(Sv < -1): $S=+1$(伸長性応力)および $\nu=-1.1$ を使用する。この領域は「停止乱流」を示すと仮説が立てられた。
$\nu=0$(非配向性)の参照ケースも含まれ、収縮性と伸長性の応力は回転を除いて同等であり、比較のためのニュートラルなベースラインを提供した。
第二に、制約のないQテンソルモデルが、発見の文脈を広げ、欠陥が多く存在するダイナミクスへの遷移を探求するために採用された。このモデルは、ランドー・ド・ジェンヌフレームワーク(ベリス・エドワーズモデル)に基づいており、Appendix Dで詳述されている。これは、真の $\pm 1/2$ トポロジカル欠陥の核生成を明示的に許可した。ここで重要な制御パラメータは、欠陥コアサイズ $\epsilon$ とアクティブ長 $l_a$ の比であった。このモデルを使用したシミュレーションでは、$R=1$、$S=1$、$A=10000$、$v=-1$ のパラメータが使用され、小さな角度摂動を持つ静止ネマティック状態から開始された。
数値積分は、運動量バランス(式(6))のための擬スペクトル法と、角度場進化(式(8))のための有限要素法(FEM)を組み合わせたハイブリッドスキームに依存した。Appendix Aで詳述されている。小振幅のガウス白色ノイズが、完全に発達したアクティブ乱流への進化を加速するために導入された。著者らが差別化または克服しようとした「犠牲者」(ベースラインモデル)は、主に $\nu=0$ 非配向性ケースと収縮性流動配向領域で観察された強い大規模乱流であった。Qテンソルモデルは、欠陥フリーモデルの予測の堅牢性をテストするための厳密な手段としても機能した。
証拠が証明すること
本論文で提示された証拠は、欠陥フリーアクティブネマティック乱流が、協調的な流れをチャネル化しカオス的な運動を抑制する安定した木のような領域壁ネットワークの出現によって特徴付けられる、驚くべき動的停止を起こし得ることを断定的に証明している。
動的停止の根本的なメカニズムは、伸長性流動配向領域(Sv < -1)を収縮性流動配向領域(Sv > 1)および $\nu=0$ 参照ケースと比較することによって、徹底的に証明された。収縮性配向領域では、シミュレーション(図1a-1c、ムービーS1)は、強い一時的な大規模ジェットと断片化された動的に再編成されるネマティック領域壁を伴う、非常にカオス的な流れを示した。「強い大規模乱流」のベースラインを表していた。これとは対照的に、伸長性配向領域(図1d-1f、ムービーS2)は、顕著に弱い大規模流れを示し、支配的な流れは曲がった領域壁に局在していた。決定的に、これらの領域壁は強く安定化され、永続的な空間を埋める木のようなパターンに成長・分岐し、「グリッドロック」状態、すなわち動的停止と呼ばれる状態になった。
この停止の決定的な、否定できない証拠は、スペクトル分析(図1g-1i)から得られた。
* 速度パワースペクトル(図1g): 両方の領域が低波数で普遍的な $q^{-1}$ スケーリングを示したが、収縮性ケースは大規模ジェットに関連する広範囲のスケールを示した。伸長性(停止)ケースは、より狭い $q^{-1}$ 範囲と短い長さスケールでの明確なピークを示し、大規模カオス流よりも局在した壁流の優位性を確認した。
* フランクエネルギー スペクトル(図1h): 伸長性(停止)ケースは、カオス的な収縮性領域のより広いピークとは異なり、非常に狭くシャープなピークを示し、高度に組織化され安定した壁パターンを示唆した。
* 相関時間スペクトル(図1i): これはおそらく最も説得力のある証拠であった。停止領域は、特に大規模で、流れとネマティックテンソル場の両方で著しく長い相関時間を示した。これは、ダイナミクスの低下とパターンの「ロック」を定量的に示し、システムが実際に動的停止を起こしたことを証明した。
さらなる証拠は、これらの停止状態の創発的なトポロジーを強調した。領域壁は「擬似欠陥」(開始点、分岐点、終点)を形成した。これらは真のトポロジカル欠陥ではないが、保存される擬似電荷を運んだ(図3)。シミュレーションは、初期の縞模様パターンから、ジグザグ不安定化と壁分岐を経て、最終的なグリッドロックされた木のようなパターンへの動的進化を示した(図2)。「アンカーリングモチーフ」(図4a)は、特に安定した構造として特定され、流れを「トラップ」する役割を果たした。擬似欠陥数の長期にわたる遅い緩和(図5c)は、ガラス系における老化現象を想起させ、状態の停止した性質をさらに強調した。さらに、停止パターンは「ユニカースル迷宮」(図6b)を囲むことが示され、他のシステムではまれなパターンであり、ユニークなパターン形成現象を示している。
Qテンソルモデルを使用して、動的停止の堅牢性が検証された。このモデルは、停止が欠陥フリー制約のアーティファクトではなく、欠陥核生成がエネルギー的に抑制される(すなわち、$\epsilon/l_a$ が小さい)場合に一般的な特徴であることを確認した。欠陥コアサイズ $\epsilon$ が臨界閾値($\approx 0.25 l_a$)を超えて増加すると、真の $\pm 1/2$ 欠陥が核生成し始め(図7b、7e、7f)、停止した壁パターンを破壊し、システムを無秩序な渦支配の乱流状態に遷移させた。この遷移は、欠陥がエネルギーの高い領域壁を効率的に溶解したため、全弾性自由エネルギーの劇的な減少を伴った(図7b、12c)。シミュレーションはまた、分岐点擬似欠陥が欠陥核生成の「ホットスポット」として機能することを示した(ムービーS8)。これにより、欠陥フリー領域と欠陥が多く存在する領域の間に明確なつながりが確立された。Qテンソルモデルと小さな $\epsilon/l_a$ における制約付き $\theta$ モデルとの定量的な一致(図11、ムービーS6)は、その極限における単純なモデルの妥当性をさらに固めた。
限界と将来の方向性
この研究はアクティブネマティック乱流に関する深い洞察を提供する一方で、いくつかの限界も浮き彫りにし、将来の研究のための多くの道を開く。
1つの重大な限界は、動的停止の実験的実現である。本論文は、この主要な予測がまだ実験で観察されていないことを明確に述べている。これを達成するには、現在の実験セットアップよりも欠陥対の核生成のエネルギーコストが大幅に高いアクティブ材料が必要となるだろう。これは、分子設計や欠陥形成を大幅に抑制する環境制御などの材料科学の革新の必要性を示唆している。
もう1つのさらなる探求の領域は、システムサイズ効果に関するものである。大規模シミュレーションが実行されたが、著者らは、さらに大きなシステムでは、頻繁な破壊イベントが停止した壁ネットワークの永続的なシステム全体に広がる接続性を妨げた(ムービーS9)と述べている。これは、停止状態が不安定になる臨界システムサイズが存在する可能性を示唆しており、おそらく壁ネットワークを破壊する可能性のある大規模カオス流の強度の増加によるものである。将来の研究は、この安定性境界をマッピングし、非常に大規模での破壊メカニズムを理解することを目指すべきである。
非単調な波長選択メカニズムは、未解決の問題のままである。本論文は、このメカニズムが本質的に非線形かつ2次元であり、その正確な依存性がまだ完全に理解されていないことを認めている。この複雑な相互作用を解明するには、さらなる理論的および計算的研究が必要である。
さらに、観察された欠陥密度とコアサイズの非単調依存性(一部の領域ではコアサイズ増加に伴い減少する)は興味深いが、完全には説明されておらず、将来の研究に委ねられている。これは、領域壁ネットワークの安定性に対する欠陥エネルギー学とパターン形成との間に、現在理解されているよりも複雑な関係があることを示唆している。非常に小さな欠陥コアサイズでのQテンソルシミュレーションの計算コストも実用的な限界を提示しており、その領域ではより単純な $\theta$ モデルが不可欠な代替手段となっている。
将来に向けて、いくつかの議論のトピックが現れる。
- 欠陥フリーアクティブネマティックシステムの設計: 流動配向と欠陥コアサイズの理解を活用して、本質的に欠陥形成を抑制し、それによって動的停止を促進するアクティブネマティックシステムをどのように設計できるか?これには、材料特性、アクティビティレベル、または閉じ込め形状の調整が含まれる可能性がある。
- 擬似欠陥と真の欠陥の相互作用: 擬似欠陥と真のトポロジカル欠陥が共存する遷移領域は豊かで、さらなる調査に値する。真の欠陥(壁の開始点または終点として機能できる)は、擬似欠陥ネットワークとどのように相互作用するか?停止状態と乱流状態を切り替えるために、この相互作用を制御できるか?
- 長距離トポロジカル秩序の本質: 停止状態で見られるユニカースル迷宮は、長距離トポロジカル秩序の一形態を示唆している。この秩序の数学的および物理的特性は何か?それは凝縮系物理学における他の形態のトポロジカル秩序と比較してどうであり、材料特性への影響は何か?
- ガラス系および老化とのアナロジー: 停止した領域壁ネットワークの遅い緩和ダイナミクスは、ガラス系における老化現象の特徴を共有している。ガラスの物理学からの洞察は、停止したアクティブネマティックの安定性、緩和、および摂動への応答をよりよく理解するために適用できるか?
- 構成要素枯渇の影響: 論文では、実験で欠陥でネマティック構成要素が枯渇していることが観察されており、これは欠陥エネルギーコストを低下させる可能性があると述べている。これを将来のモデルに組み込むことは、欠陥核生成とその壁ネットワーク安定性への影響のより正確な描写を提供する可能性がある。
- 3次元への一般化: この研究は2次元システムに焦点を当てていたが、3次元への分析の拡張は自然な次のステップとなるだろう。同様の動的停止現象または擬似トポロジカル構造が3次元アクティブネマティックに出現するか、そしてそれらの特性はどのように異なるだろうか?
これらの将来の方向性は、この分野の学際的な性質を強調しており、アクティブネマティックシステムの複雑さを完全に解明するために、理論物理学者、材料科学者、および実験家の協力が必要である。
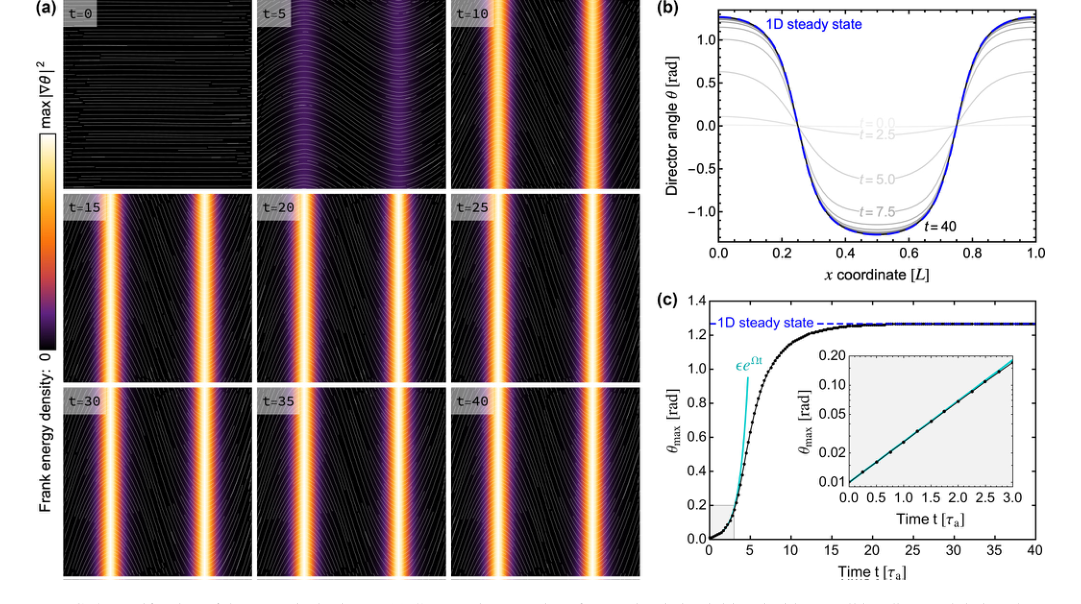 FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
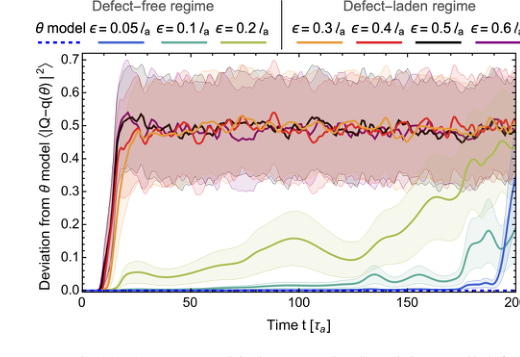 FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]
FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]