동적 정체 현상: 능동 네마틱 난류에서
Active fluids display spontaneous turbulentlike flows known as active turbulence.
배경 및 학문적 계보
기원 및 학문적 계보
분자 모터, 세포 또는 합성 입자와 같은 내부 구성 요소에 의해 구동되는 능동 유체, 즉 재료의 연구는 수십 년 동안 활발한 연구 분야였습니다. 이러한 내부 활동은 종종 혼란스러운 자발적인 흐름을 생성하며, 이를 통틀어 능동 난류라고 합니다. 이 현상은 박테리아 현탁액, 정자, 세포 골격 혼합물, 단층 세포 및 인공 자가 추진 입자를 포함한 다양한 시스템에서 관찰되었습니다 [1, 2-31]. 역사적으로 이러한 흐름은 관성이 무시할 수 있는 낮은 레이놀즈 수에서 발생함에도 불구하고 고전적인 관성 난류와 놀라운 유사성을 보입니다.
길쭉한 입자가 정렬되는 경향이 있는 능동 유체의 특정 유형인 능동 네마틱 난류 분야의 최근 발전은 속도 파워 스펙트럼과 같은 특정 특징에 대한 보편적인 스케일링 법칙을 밝혀냈습니다 [22,32,33]. 예를 들어, 작은 파수 $q$에서 속도 파워 스펙트럼의 $q^{-1}$ 스케일링은 레이놀즈 수가 낮게 유지된다면 점도 또는 활성과 같은 특정 재료 특성에 독립적으로 놀랍도록 견고하다는 것이 발견되었습니다 [34]. 이 보편적인 거동은 결함이 있거나 결함이 없는 강하게 정렬된 네마틱 모두에서 관찰되었습니다 [32,33].
그러나 우리의 이해에는 상당한 격차가 존재했습니다. 이러한 보편적인 스케일링 법칙이 확립되었지만, 흐름 장의 다른 비보편적인 특징에 대한 재료 특성 및 위상 결함의 존재 또는 부재의 영향은 대부분 탐구되지 않았습니다. 이러한 명확성의 부족은 근본적인 한계를 나타냈습니다. 보편적인 측면을 특징짓는 데 성공했지만, 이전 접근 방식은 흐름 정렬 매개변수 또는 결함 형성에 드는 에너지 비용과 같은 요인이 이러한 보편적 스케일링을 넘어서는 복잡한 패턴과 역학을 어떻게 형성할 것인지 충분히 설명하지 못했습니다. 따라서 이 논문은 특히 이전에 보지 못했고 설명되지 않은 상태인 결함 없는 능동 네마틱에서의 "동적 정체" 현상에 초점을 맞춰 이러한 비보편적인 특성을 정확하게 조사하도록 동기 부여되었습니다.
직관적인 도메인 용어
이 논문에서 사용된 전문 용어를 완전한 초보자가 직관적으로 이해할 수 있도록 일상적인 비유를 들어 설명합니다.
- 능동 유체: 각 작은 성분(예: 파스타 조각 또는 채소 조각)이 자체 소형 모터를 가지고 끊임없이 움직이며 내부에서 수프를 휘젓는 수프 그릇을 상상해 보세요. 숟가락으로 휘저어야 하는 일반 수프와 달리 이 수프는 완전히 자체 휘젓기입니다.
- 네마틱 질서: 키 큰 잔디밭을 생각해보세요. 정상적이고 무질서한 상태에서는 잔디 블레이드가 모든 방향을 가리킬 수 있습니다. 그러나 네마틱 질서가 있으면 대부분의 잔디 블레이드가 부드러운 바람에 함께 흔들리는 것처럼 대략 같은 방향으로 정렬되는 경향이 있습니다. 이 선호되는 집합적 방향을 과학자들은 "디렉터"라고 부릅니다.
- 능동 네마틱 난류: 이제 자체 휘젓는 수프와 정렬되는 잔디 블레이드를 결합하세요. 내부 모터가 매우 강력하고 혼란스럽다면 단순히 부드럽게 정렬되는 것이 아니라, 재료 자체에 의해 생성되지만, 거친 강 급류 또는 혼란스러운 연기 기둥과 매우 유사하게 소용돌이치고 예측할 수 없으며 매우 역동적인 전류를 생성합니다. 이것이 능동 네마틱 난류입니다.
- 위상 결함: 정렬된 잔디밭에서 위상 결함은 잔디 블레이드가 집합적 정렬을 갑자기 잃고 중앙 지점을 중심으로 소용돌이치거나 상충되는 방향을 가리키는 작은 국소적인 "매듭" 또는 "소용돌이"와 같습니다. 이는 대체로 질서 있는 시스템 내에서 강렬한 무질서의 지점입니다.
- 동적 정체: 끊임없이 움직이고 차선을 변경하여 유동적이고 끊임없이 변화하는 교통 패턴을 만드는 바쁜 고속도로를 상상해 보세요. 동적 정체는 그 교통 흐름이 갑자기 "도로"와 "하천"의 고정된 나무 모양 네트워크로 정착되는 것과 같습니다. 자동차는 여전히 이 경로를 따라 움직이지만, 도로 네트워크 자체의 전반적인 구조는 안정화되고 더 이상 극적으로 진화하지 않습니다. 시스템의 혼란스러운 진화는 지속적이고 조직적인 패턴으로 "얼어붙습니다".
표기법 표
| 표기법 | 유형 | 설명 |
|---|---|---|
| $\mathbf{v}$ | 변수 | 흐름 속도 장 |
| $\mathbf{n}$ | 변수 | 네마틱 디렉터 장 (막대 모양 입자의 국소 평균 방향) |
| $\psi$ | 변수 | 흐름 함수 (비압축성 흐름 설명) |
| $s$ | 변수 | 스칼라 질서 매개변수 (국소 네마틱 정렬 강도 정량화) |
| $Q_{\alpha\beta}$ | 변수 | 네마틱 질서 매개변수 텐서 (네마틱 질서 및 정렬 설명) |
| $K$ | 매개변수 | 탄성 상수 (디렉터 장 왜곡에 대한 저항 측정) |
| $\eta$ | 매개변수 | 전단 점도 (유체의 전단 흐름에 대한 저항) |
| $\zeta$ | 매개변수 | 능동 응력 매개변수 (내부 능동 구동 강도) |
| $v$ | 매개변수 | 흐름 정렬 매개변수 (전단 하에서 네마틱이 재정렬되는 경향) |
| $\gamma$ | 매개변수 | 회전 점도 (디렉터 장 회전에 대한 저항) |
| $A$ | 매개변수 | 활성 수 (시스템 크기에 대한 능동 강제력의 무차원 척도) |
| $R$ | 매개변수 | 점도 비율 (회전 점도 대 전단 점도 비율, $\gamma/\eta$) |
| $S$ | 매개변수 | 능동 응력의 부호 (신장성/수축성 시스템에 대해 $\pm 1$) |
| $\epsilon$ | 매개변수 | 결함 코어 크기 (위상 결함 코어의 특성 크기) |
문제 정의 및 제약 조건
핵심 문제 공식화 및 딜레마
이 논문은 내부적으로 구동되는 유체 구성 요소가 자발적이고 혼란스러운 흐름을 생성하는 능동 네마틱 난류에 대한 우리의 이해에서 중요한 격차를 다룹니다. 이전 연구에서는 능동 네마틱 난류의 속도 파워 스펙트럼이 특정 재료 특성이나 위상 결함의 존재에 크게 독립적인 보편적인 스케일링 법칙을 나타낸다고 확립했습니다. 그러나 재료 특성 및 결함의 부재가 이러한 흐름의 비보편적인 특징에 미치는 정확한 영향은 대부분 탐구되지 않았습니다.
이 논문의 시작점(입력/현재 상태)은 능동 네마틱 난류, 특히 "결함 없는" 영역입니다. 이 결함 없는 상태는 명시적인 모델 구성(디렉터 장이 고정된 모듈러스를 가져 결함 형성을 방지하는 디렉터 기반 모델) 또는 결함 코어의 에너지 비용이 엄청나게 높은 조건(작은 결함 코어 크기를 가진 Q-텐서 모델)을 통해 달성됩니다. 시스템은 능동 응력 매개변수 $\zeta$ 및 액정의 전단 하에서의 재정렬 경향을 설명하는 흐름 정렬 매개변수 $v$와 같은 매개변수로 특징지어집니다.
원하는 최종점(출력/목표 상태)은 흐름 정렬 매개변수 $v$와 위상 결함의 억제가 능동 네마틱 흐름의 시공간 구조 및 역학에 미치는 영향을 포괄적으로 이해하는 것입니다. 저자들은 결함이 존재할 때 일반적으로 관찰되는 혼란스러운 흐름과는 다른, 결함 없는 능동 네마틱 난류에서 발생하는 새로운 "정체된 패턴"을 밝히고 특징화하는 것을 목표로 합니다. 궁극적으로, 특히 네마틱 영역 벽의 창발적 유효 위상 및 연결 규칙에서 발생하는 이 "동적 정체"의 기본 메커니즘을 설명하는 것이 목표입니다.
이 논문이 연결하려고 시도하는 정확한 누락된 연결 또는 수학적 격차는 흐름 정렬, 능동 응력 및 위상 결함의 부재 간의 상호 작용을 체계적으로 탐색하여 능동 난류 내에서 질서 있는 정체된 상태의 출현을 설명할 수 있는 이론적 및 계산적 프레임워크의 부족입니다. 보편적인 스케일링 법칙은 알려져 있었지만, 결함 없는 시스템에서의 특정 비보편적인 패턴과 역학은 대부분 특징화되지 않았습니다. 이 논문은 이러한 요인이 혼란스러운 난류에서 동적 정체 상태로의 전환을 어떻게 유도하는지에 대한 상세한 수학적 및 물리적 설명을 제공하고자 합니다.
이 특정 문제를 해결하려는 이전 연구자들을 가두었던 고통스러운 절충 또는 딜레마는 능동 난류 자체의 본질에 있습니다. 능동 난류는 종종 지속적이고 혼란스러운, 소용돌이 중심의 흐름으로 특징지어지며, 위상 결함은 이러한 혼란의 주요 동인 및 조직자 역할을 합니다. 딜레마는 결함이 무질서의 원인이지만, 특정 영역에서 지속적인 난류를 가능하게 한다는 것입니다. 이 논문은 신장성 막대 모양 네마틱에서 위상 결함의 부재가 더 단순한 형태의 난류로 이어지는 것이 아니라 완전히 다른, 정체되고 덜 역동적인 영역으로 이어진다는 것을 밝힙니다. 이는 결함이 전적으로 파괴적이라는 기존의 견해에 도전하고 지속적인 난류 역학을 유지하는 데 있어 그 역할을 강조합니다.
제약 조건 및 실패 모드
능동 네마틱 난류에서 동적 정체 현상을 이해하는 문제는 몇 가지 가혹하고 현실적인 제약 조건으로 인해 극도로 어렵습니다:
-
물리적/재료적 제약 조건:
- 결함 없는 요구 사항: "결함 없는" 능동 네마틱 난류에 대한 핵심 초점은 중요한 제약입니다. 위상 결함은 대부분의 능동 네마틱 시스템에서 어디에나 존재하며 종종 혼란스러운 흐름의 주요 동인입니다. 실험적으로 진정한 결함 없는 능동 네마틱 시스템을 실현하고 유지하는 것은 극도로 어렵습니다. 이 논문은 결함 형성을 구성으로 금지하는 디렉터 기반 모델(고정된 모듈러스 $|n|=1$을 가진 디렉터 장)과 결함 코어에 대한 에너지 비용이 너무 높은 조건(작은 결함 코어 크기를 가진 Q-텐서 모델)을 사용하여 이를 해결합니다.
- 매개변수 민감도: 동적 정체 발생은 재료 특성, 특히 흐름 정렬 매개변수 $v$와 능동 응력 매개변수 $\zeta$의 상호 작용에 매우 민감합니다. 정체된 상태는 신장성 정렬 영역($v \le 0$인 막대 모양 네마틱의 경우 $\zeta v < 0$)에서만 관찰됩니다. 이는 현상이 모든 능동 네마틱 시스템에서 보편적인 것이 아니라 특정 좁은 매개변수 공간에 국한된다는 것을 의미합니다.
- 낮은 레이놀즈 수: 이론적 프레임워크와 시뮬레이션은 엄격하게 "소멸하는 레이놀즈 수"에서 작동하며, 이는 관성 효과가 무시할 수 있음을 의미합니다. 이는 유체 역학을 단순화하지만, 관성이 중요한 역할을 하는 시스템에 대한 결과의 직접적인 적용 가능성을 제한하며, 흐름 패턴과 안정성을 변경할 수 있습니다.
- 결함 코어 크기 임계값: 보다 일반적인 Q-텐서 모델에서 결함 코어 크기 $\epsilon$과 능동 길이 $l_a$의 비율은 중요한 제어 매개변수입니다. 동적 정체는 결함 핵 생성이 에너지적으로 억제될 때만 지속됩니다($\epsilon \ll l_a$). $\epsilon$이 임계값(고정된 $Sv = -1$의 경우 약 $0.25 l_a$)을 초과하면 결함이 핵 생성되어 정체된 상태가 파괴되고 결함이 있는 난류로 전환됩니다. 이는 현상을 관찰하기 위한 엄격한 물리적 조건을 부과합니다.
-
계산 제약 조건:
- 대규모 시뮬레이션: 동적 정체의 창발적 패턴과 장기 역학을 관찰하려면 "대규모 수치 시뮬레이션"이 필요합니다. 이는 특히 다른 매개변수 영역과 시스템 크기를 탐색할 때 상당한 계산 비용과 시간을 의미합니다.
- Q-텐서 모델의 수치적 강성: 전체 Q-텐서 모델, 특히 작은 결함 코어 크기($\epsilon \to 0$)의 극한에서 시뮬레이션하는 것은 "점점 더 강성이 있고 계산 비용이 많이 듭니다." 이러한 강성은 잠재적인 결함 코어와 관련된 날카로운 기울기와 작은 길이 규모를 해결해야 할 필요성에서 발생하며, 이로 인해 더 간단한 디렉터 기반 모델이 이 극한에서 더 실용적인 대안이 됩니다.
- 복잡한 하이브리드 수치 체계: 시뮬레이션은 운동량 균형을 위한 유사 스펙트럼 방법과 각도 장 진화를 위한 유한 요소 방법을 결합한 정교한 하이브리드 수치 체계를 사용합니다. 특성-갈레르킨(characteristics-Galerkin)과 같은 기술, 라플라스 항에 대한 암시적 처리, 시간 진화를 위한 아담스-배쉬포스(Adams-Bashforth)를 포함한 이 복잡한 설정은 관련된 다양한 물리적 현상에 걸쳐 수치적 안정성과 정확성을 보장하는 데 필요합니다.
- 시스템 크기 제한: 저자들은 정체의 지속성을 테스트하기 위해 "더 큰 시스템 크기"에서 시뮬레이션을 수행했지만, 이러한 시뮬레이션은 "상당히 더 큰 계산 노력을 필요로 했습니다." 이는 계산 리소스가 이러한 현상을 연구할 수 있는 규모에 실질적인 제한을 부과하며, 진정한 거시적 시스템에서 매우 긴 범위의 상관 관계 또는 정체된 상태의 안정성을 관찰하는 데 영향을 미칠 수 있음을 나타냅니다.
-
데이터 기반/실험적 제약 조건:
- 실험적 검증 부족: 주요 제약 조건은 "결함 없는 능동 네마틱에 대한 우리의 예측을 검증하는 것은 실험적 과제를 제시합니다"라는 것입니다. 왜냐하면 "동적 정체—우리의 주요 예측—는 아직 실험적으로 실현되지 않았기 때문입니다." 가짜 결함 및 미로 패턴과 같은 일부 요소가 관찰되었지만, 지속적이고 시스템 전반의 정체된 상태는 실험에서 여전히 파악하기 어렵습니다. 이는 현재 연구 중인 시스템보다 결함 핵 생성이 훨씬 더 비용이 많이 드는 새로운 능동 재료를 찾도록 요구합니다.
- 결함 제어의 어려움: 실험적 능동 네마틱 시스템에서 위상 결함을 정밀하게 제어하거나 억제하는 능력은 중요한 장애물입니다. 대부분의 실험 설정은 본질적으로 결함을 생성하므로 모델에서 예측한 결함 없는 영역을 분리하고 연구하기 어렵습니다.
이 접근 방식이 선택된 이유
선택의 불가피성
저자들이 디렉터 기반 결함 없는 모델을 선택한 것은 단순히 선호도가 아니라, 그들이 해결하고자 했던 문제, 즉 "위상 결함의 부재"에서 "능동 네마틱 난류에서의 동적 정체"를 이해하는 데 의해 결정된 불가피성이었습니다. 전통적인 "SOTA"(State-Of-The-Art) 방법, 예를 들어 표준 Q-텐서 모델은 대부분의 능동 네마틱 시스템에서 어디에나 존재하는 위상 결함의 핵 생성 및 역학을 설명하도록 설계되었습니다. 그러나 이 논문의 핵심 참신함은 이러한 결함이 에너지적으로 억제되거나 구성으로 완전히 금지되는 영역을 탐구하는 데 있습니다.
저자들이 전통적인 방법이 불충분하다고 깨달은 정확한 순간은 결함 없는 상태를 조사하기로 결정했을 때였습니다. 그들이 선택한 모델은 이전의 최소 모델 [33]을 일반화한 것으로, 네마틱 디렉터 장에 대해 $|n|=1$의 고정된 모듈러스를 명시적으로 부과합니다. 이 제약 조건은 섹션 II에서 언급했듯이 "위상 결함의 생성을 방지합니다 [33,38]." 이 의도적인 설계 선택은 동적 정체 현상, 즉 안정적이고 나무 모양의 영역 벽 패턴으로 특징지어지는 것이 이동 가능한 위상 결함에 의해 근본적으로 변경되거나 심지어 방지되기 때문에 필수적이었습니다. 결함 없는 환경을 보장하는 모델 없이는 이 새로운 정체된 상태를 분리하고 특징화하는 것이 불가능했을 것입니다. Q-텐서 모델은 더 일반적이지만, 저자들이 발견하고자 하는 특정 역학을 가릴 결함을 도입했을 것입니다.
비교 우위
단순한 성능 지표를 넘어서, 디렉터 기반 결함 없는 모델은 이 특정 연구 질문에 대해 심오한 질적 우수성을 제공합니다. 그 구조적 장점은 위상 결함의 혼란스러운 역학에 의해 가려지는 현상을 분리하고 강조할 수 있다는 능력에 있습니다.
- 동적 정체 계시: 가장 중요한 질적 이점은 "동적 정체" 상태 자체를 계시할 수 있는 능력입니다. 신장성 정렬 네마틱($S\nu < -1$)에서 이 모델은 네마틱 영역 벽이 "자신이 끌어들이는 흐름에 의해 강하게 안정화되어" "공간을 채우는 나무 모양 패턴"으로 이어진다고 보여줍니다 [그림 1(d)-1(f)]. 이 정체된 상태는 다른 방법으로 연구되는 혼란스럽고 결함이 있는 난류와 구별되는 새로운 발견입니다.
- 고차원 노이즈 및 장기 안정성 처리: 정체된 영역은 "훨씬 약한" 대규모 혼란스러운 흐름과 "특히 대규모 네마틱 텐서 장의 훨씬 긴 상관 시간"을 나타냅니다 [그림 1(i), 파란색]. 이는 안정적이고 오래 지속되는 구조 및 역학을 포착하는 데 있어 질적으로 우수함을 나타내며, 이는 결함이 있는 시스템의 고차원 노이즈 및 짧은 상관 시간으로 인해 종종 압도됩니다. 이 모델은 결함 역학에서 발생하는 "노이즈"를 효과적으로 줄여 패턴 형성 메커니즘이 명확하게 나타나도록 합니다.
- 대상 영역에 대한 계산 효율성: 주요 초점은 아니지만, 이 논문은 실질적인 이점을 언급합니다. 섹션 V.A에서 Q-텐서 모델을 논의할 때, 저자들은 "이 극한 [작은 결함 코어 크기]에서 Q-텐서 시뮬레이션이 점점 더 강성이 있고 계산 비용이 많이 들기 때문에 $\theta$ 모델이 더 효율적이고 실용적인 대안이 됩니다."라고 말합니다. 결함 없는 영역(매우 작은 결함 코어 크기에 해당)의 경우, 디렉터 기반 모델은 계산 비용과 안정성 면에서 압도적으로 우수하여 정체된 상태에 대한 더 광범위한 시뮬레이션을 가능하게 합니다.
제약 조건과의 일치
선택된 디렉터 기반 모델은 위상 결함으로 인한 복잡성을 도입하지 않고 능동 네마틱 난류를 연구하는 문제의 암묵적 제약 조건과 완벽하게 일치합니다. 문제의 가혹한 요구 사항과 솔루션의 고유한 속성 간의 "결합"은 여러 방식으로 분명합니다.
- 강제 결함 없는 상태: 가장 중요한 제약 조건은 위상 결함의 부재입니다. 모델의 공식은 디렉터 장 모듈러스를 $|n|=1$로 고정함으로써 본질적으로 결함 핵 생성을 방지합니다 [33,38]. 이것은 직접적이고 완벽한 일치이며, 관찰된 모든 현상이 활성, 흐름 정렬 및 네마틱 탄성의 상호 작용으로 인한 것임을 보장합니다.
- 흐름 정렬에 초점: 이 논문의 목표는 "흐름 정렬 매개변수 $\nu$"가 능동 네마틱 난류에 어떻게 영향을 미치는지 조사하는 것입니다. 그들의 접근 방식의 기초를 형성하는 Ericksen-Leslie 액정 모델은 이 매개변수를 자연스럽게 통합하여 흐름의 시공간 구조 및 동적 정체의 출현에 대한 그 효과를 직접 연구할 수 있습니다.
- 명확성을 위한 최소한의 접근 방식: 결함 역학의 복잡성을 제거함으로써 이 모델은 최소한의 접근 방식을 준수하여 패턴 형성 및 정체의 기본 메커니즘을 더 명확하게 식별할 수 있습니다. 이는 복잡한 현상을 직관적으로 설명하려는 목표와 일치합니다. 이 모델은 결함이 없을 때 발생할 수 있는 근본적으로 다른 행동을 강조하기 위해 시스템을 단순화합니다.
대안의 거부
이 논문은 암묵적으로 그리고 명시적으로, 특히 결함 없는 능동 네마틱에 대한 초기 조사를 위한 주요 도구로서 전체 Q-텐서 모델과 같은 대안적 접근 방식을 거부합니다. 이 거부에 대한 이유는 명확하고 다면적입니다.
- 계산 비용 및 강성: 섹션 V.A에서 언급했듯이, 결함 코어 크기 $\epsilon$이 매우 작을 때(결함 없는 극한에 접근할 때), "Q-텐서 시뮬레이션은 점점 더 강성이 있고 계산 비용이 많이 듭니다." 결함이 에너지적으로 억제되거나 없는 영역의 경우, 디렉터 기반 $\theta$ 모델은 "더 효율적이고 실용적인 대안"입니다. 이것은 이 특정 문제에 대한 주요 접근 방식으로 Q-텐서 모델을 사용하지 않는 강력한 실질적인 이유입니다.
- 결함의 혼란스러운 효과: 주요 목표는 "위상 결함의 부재"에서 현상을 연구하는 것이었습니다. Q-텐서 모델은 설계상 결함 핵 생성 및 역학을 허용합니다. 이러한 모델을 사용하면 결함 없는 환경에서 동적 정체로 이어지는 특정 메커니즘을 분리하기 어렵게 만드는 추가적인 복잡성 계층이 도입됩니다. 저자들은 "능동 네마틱에서의 대부분의 실험과 시뮬레이션은 결함이 있는 영역에서 수행되었습니다"(섹션 VII)라고 명시적으로 언급하며, 이는 이러한 이전 접근 방식이 그들의 새로운 결함 없는 연구에 적합하지 않았음을 시사합니다.
- 검증, 대체가 아님: Q-텐서 모델은 섹션 V에서 대체가 아니라 "우리의 결함 없는 결과가 적용 가능한 영역을 명확히 하고 (2) 해당 조건이 더 이상 충족되지 않을 때 발생하는 더 친숙한 결함이 있는 동작으로의 전환을 탐색하기 위해" 소개됩니다. 이는 Q-텐서 모델이 결함 없는 정체된 상태 자체에 대한 초기 집중 연구가 아니라 결함 없는 결과의 맥락을 설명하고 전환을 탐색하는 데 유용한 도구임을 보여줍니다. 이 논문은 $\theta$ 모델이 결함 없는 극한에서 Q-텐서 모델과 수렴함을 보여주며, 이 특정 영역에 대한 더 간단한 모델의 유효성을 확인합니다. 결함의 효과를 다른 매개변수의 효과와 분리하는 능력은 논문의 결과에 중요합니다.
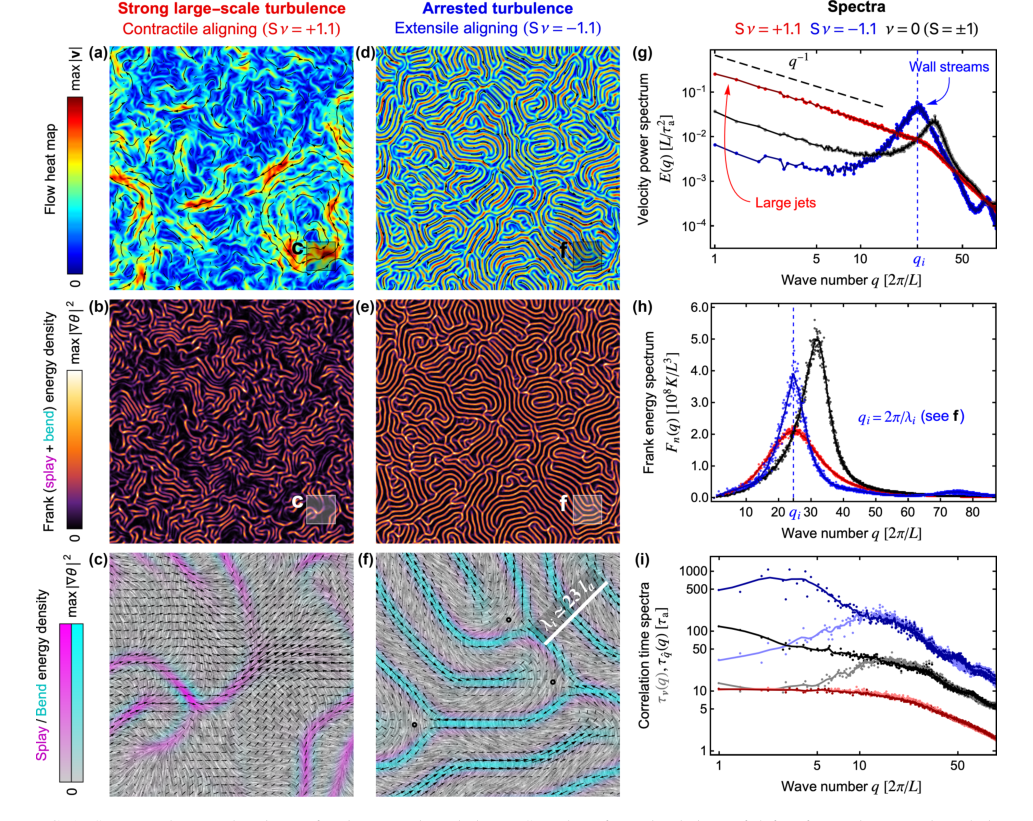 FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
FIG. 1. Strong and arrested regimes of active nematic turbulence. Snapshots from simulations of defect-free active nematic turbulence in contractile [panels (a)–(c)] and extensile [panels (d)–(f)] flow-aligning systems. Parameter values were set to R = 1, ν = −1.1, and A = 3.2 × 105. Top panels (a) and (d) show the flow field; black curves are streamlines, and the color indicates the speed (see Movies S1 and S2 of the Supplemental Material [35]). Middle panels (b) and (e) show the Frank free energy density ∼|∇θ|2, with high-intensity lines corresponding to nematic domain walls (see Movies S1 and S2 of the Supplemental Material [35]). Bottom panels (c) and (f) are zooms highlighting the type of nematic distortion as well as the interplay between nematic walls and flows. The gray-scale background is the line integral convolution representation of the director field n. Magenta and cyan intensities, respectively, represent splay (∇· n)2 and bend |∇× n|2 contributions to the Frank energy density. The black arrows represent the flow field v, which localizes along the nematic walls in the arrested regime. Black circles indicate stagnation points of the flow. White scale bar represents the selected wavelength λi. (g)–(i) Spectra characterizing fully developed active nematic turbulence (see details in Appendix B). The lines in panels (h) and (i) represent a smoothed (Gaussian) interpolation of the computed data points. We compare the flow-aligning contractile [red, as in panels (a)–(c) and Movie S1 of the Supplemental Material [35]] and extensile [blue, as in panels (d)–(f) and Movie S2 of the Supplemental Material [35]] cases with the ν = 0 case (black, as in Fig. S1 and Movie S3 of the Supplemental Material [35]), for which contractile and extensile stresses are equivalent up to a rotation [38,42,43]. (g) Velocity power spectrum on a log-log scale, showing (1) the universal low-q scaling law and (2) the distinct organization of flows across scales in the different cases. The wider scaling regime in the contractile case captures the strong large-scale jets [see panel (a)]. The peak in the extensile case is representative of wall streams [see panel (d)]. (h) Frank energy spectrum, showing that (1) the selected wavelength (peak position) depends on ν but not on the sign of active stress and (2) the peak width depends on the sign of active stress when ν ̸= 0. (i) Spectrum of correlation times associated with the flow v (light colored points and lines) and the nematic tensor ˆqαβ (darker points and lines). This log-log plot reveals strong differences in decay times between the regimes, as well as the differences between the flow and nematic tensor within a regime. Correlation times are extracted from exponential fits to the corresponding space-time autocorrelation functions in Fourier space (see Appendix B)
수학적 및 논리적 메커니즘
마스터 방정식
이 논문에서 연구된 결함 없는 영역에서의 능동 네마틱 난류의 근본적인 거동은 유체 흐름과 네마틱 액정의 방향 간의 상호 작용에 의해 지배됩니다. 이 상호 작용은 두 개의 결합된 편미분 방정식으로 포착됩니다. 하나는 유체의 운동량 균형을 설명하며, 무차원화 및 회전 후 흐름 함수에 대한 푸아송 방정식이 되고, 다른 하나는 네마틱 디렉터 장의 역학을 설명합니다.
무차원화된 운동량 균형 방정식(무차원화 및 레이놀즈 수가 0일 때의 운동량 균형 방정식의 회전에서 파생됨)은 다음과 같습니다.
$$
\nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) \quad \text{(6)}
$$
무차원화된 디렉터 역학 방정식(네마틱 방향이 시간에 따라 어떻게 변하는지 설명함)은 다음과 같습니다.
$$
\partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi \quad \text{(8)}
$$
이 두 방정식, (6) 및 (8)은 결함 없는 능동 네마틱 모델의 수학적 엔진을 형성합니다. 유체 흐름($\psi$로 표현됨)이 네마틱 디렉터($\theta$)에 영향을 미치고, 네마틱 디렉터의 구성이 유체 흐름에 영향을 미치기 때문에 이들은 결합되어 있습니다.
항별 분석
이 마스터 방정식의 각 구성 요소를 분해하여 수학적 의미와 물리적 역할을 이해해 보겠습니다.
방정식 (6): 운동량 균형
$$ \nabla^4\psi = -S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta} + R\nu\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp) $$
-
$\nabla^4\psi$:
- 수학적 정의: 이것은 흐름 함수 $\psi$에 작용하는 복이차 연산자입니다. 이는 $\nabla^2(\nabla^2\psi)$와 같습니다. $\omega = -\nabla^2\psi$ (와도)이므로, 이 항은 본질적으로 $-\nabla^2\omega$입니다.
- 물리적/논리적 역할: 유체 역학에서 이 항은 와도의 점성 소산을 나타냅니다. 이는 감쇠 메커니즘으로 작용하여 유체 흐름의 변화에 저항하고 속도 기울기를 부드럽게 하는 경향이 있습니다. $\nabla^2$ (단순히 $\nabla^2$ 대신)의 사용은 압력을 제거하고 모든 것을 흐름 함수로 표현하기 위해 운동량 균형 방정식의 회전을 두 번 취함으로써 발생합니다.
- 왜 $\nabla^4$인가: 이 연산자는 흐름 함수로 표현될 때 스토크스 방정식(낮은 레이놀즈 수에서의 운동량 균형)의 회전을 취함으로써 자연스럽게 나타납니다. 이는 유체 흐름이 비압축성을 유지하도록 보장하고 점성 힘을 설명합니다.
-
$S$:
- 수학적 정의: 무차원 매개변수, $S = \text{sign}(\zeta)$, 여기서 $\zeta$는 능동 응력 매개변수입니다.
- 물리적/논리적 역할: 이 매개변수는 능동 응력의 성질을 결정합니다. $S = +1$은 신장성 응력(예: 막대 모양 구성 요소가 바깥쪽으로 밀어냄)을 나타내고 $S = -1$은 수축성 응력(예: 모터 단백질이 안쪽으로 당김)을 나타냅니다. 시스템의 거동을 위한 핵심 제어 매개변수이며, 시스템이 강한 난류 또는 동적 정체를 나타낼지 여부에 영향을 미칩니다.
- 왜 부호인가: 부호는 능동 구성 요소가 응력을 생성하는 방식의 근본적인 차이를 포착하며, 이는 결과적인 흐름 패턴에 심오한 영향을 미칩니다.
-
$\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$:
- 수학적 정의: 이것은 네마틱 질서 텐서 $\tilde{g}_{\alpha\beta}$의 발산입니다. 텐서 $\tilde{g}_{\alpha\beta}$는 $\tilde{g}_{\alpha\beta} = n_\alpha n_\beta - \frac{1}{2}\delta_{\alpha\beta}$로 정의되며, 여기서 $n_\alpha$는 네마틱 디렉터 $\mathbf{n} = (\cos\theta, \sin\theta)$의 성분이고, $\delta_{\alpha\beta}$는 크로네커 델타입니다.
- 물리적/논리적 역할: 이 항은 네마틱 구성 요소에 의해 생성된 능동 응력을 나타냅니다. 능동 네마틱은 내부적으로 화학 에너지를 기계적 작업으로 변환하여 유체 흐름을 구동하는 응력을 생성합니다. $\tilde{g}_{\alpha\beta}$의 발산은 이러한 응력이 어떻게 분포되고 유체 흐름을 어떻게 구동하는지를 포착합니다.
- 왜 발산인가: 응력 텐서(예: $\sigma^A$)의 발산은 해당 응력이 유체에 가하는 힘 밀도를 나타냅니다. 이것은 응력을 유체 운동량에 결합하는 표준적인 방법입니다.
-
$R$:
- 수학적 정의: 무차원 점도 비율, $R = \gamma/\eta$.
- 물리적/논리적 역할: 이 매개변수는 네마틱 디렉터의 회전 점도($\gamma$)와 유체의 전단 점도($\eta$)를 비교합니다. 이는 유체 흐름과 탄성 토크에 대한 네마틱 디렉터의 재정렬 용이성에 영향을 미칩니다.
- 왜 비율인가: 시스템 내의 두 가지 다른 유형의 점성 저항을 비교하기 때문에 비율이며, 디렉터 회전과 유체 흐름 간의 균형을 이해하는 데 중요합니다.
-
$\nu$:
- 수학적 정의: 무차원 흐름 정렬 매개변수.
- 물리적/논리적 역할: 이 매개변수는 액정 디렉터가 전단 흐름 하에서 재정렬되는 경향을 특징짓습니다. $\nu < 0$이면 네마틱은 흐름에 정렬되는 경향이 있습니다(흐름 정렬 영역). $\nu > 0$이면 텀블링되는 경향이 있습니다. 이 매개변수는 동적 정체에 대한 논문의 결과의 핵심입니다.
- 왜 계수인가: 이것은 흐름 정렬 효과의 강도를 스케일링하는 계수이며, 액정의 핵심 재료 특성입니다.
-
$\partial_\alpha\partial_\beta(\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp)$:
- 수학적 정의: 이것은 흐름 정렬 및 Ericksen 응력에서 발생하는 응력의 발산을 나타냅니다. $h_\parallel$ 및 $h_\perp$는 $h_\alpha$ 방향 필드의 성분이며, Eq. (7)에서 $h_\parallel = \frac{1}{A}\nabla^2\theta$ 및 $h_\perp = \nu(\sin 2\theta d_1\psi + \cos 2\theta d_2\psi)$로 정의됩니다. 여기서 $d_1 = \frac{1}{2}(\partial_x^2 - \partial_y^2)$ 및 $d_2 = \partial_x\partial_y$입니다. 전체 $h_\alpha$는 디렉터에 대한 탄성 토크입니다.
- 물리적/논리적 역할: 이 항은 탄성 응력(Ericksen 응력)과 흐름 정렬로 인한 응력을 나타냅니다. 탄성 응력은 네마틱 디렉터 장의 왜곡에서 발생하며, 흐름 정렬은 액정의 신장 흐름에 대한 네마틱 디렉터의 재정렬을 설명합니다. 이러한 응력은 유체 운동량 균형으로 다시 피드백되어 흐름 장에 영향을 미칩니다.
- 왜 차이인가: $\tilde{g}_{\alpha\beta}h_\parallel - \tilde{g}_{\alpha\beta}h_\perp$의 특정 조합은 변형력 텐서의 대칭 부분(Eq. 4)에서 발생하며, 여기에는 탄성 토크 및 흐름 정렬의 기여가 포함됩니다. 이 텐서의 발산은 유체에 대한 힘 밀도를 나타냅니다.
방정식 (8): 디렉터 역학
$$ \partial_t\theta - \epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta + \frac{1}{A}\nabla^2\theta = h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi $$
-
$\partial_t\theta$:
- 수학적 정의: 시간 $t$에 대한 네마틱 각도 $\theta$의 편미분.
- 물리적/논리적 역할: 이것은 시간 진화 항으로, 공간의 고정된 지점에서 네마틱 디렉터 방향이 얼마나 빨리 변하는지를 나타냅니다. 이것은 역학의 핵심입니다.
- 왜 미분인가: 이것은 상태 변수의 변화율을 설명하는 모든 역학 방정식의 기본 구성 요소입니다.
-
$\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$:
- 수학적 정의: 이것은 유체 흐름에 의한 네마틱 각도 $\theta$의 이류를 나타내는 대류 항입니다. $\epsilon_{\alpha\beta}$는 레비-치비타(완전히 반대칭) 텐서이고, $\partial_\alpha\psi$는 유체 속도 $\mathbf{v}$의 성분을 나타냅니다.
- 물리적/논리적 역할: 이 항은 네마틱 디렉터가 유체 흐름에 의해 운반되는 방식을 설명합니다. 유체 요소가 움직이면 네마틱 방향을 함께 가져갑니다. 이것은 디렉터 역학을 유체 속도에 결합하는 중요한 비선형 항입니다.
- 왜 $\epsilon_{\alpha\beta}$와 곱인가: 레비-치비타 텐서는 흐름 함수의 회전을 형성하는 데 사용되며, 이는 속도 성분을 제공합니다. 항 $\mathbf{v} \cdot \nabla\theta$는 물질 도함수를 나타내며, 국소 시간 진화와 흐름에 의한 수송 모두로 인한 변화를 포착합니다.
-
$\frac{1}{A}\nabla^2\theta$:
- 수학적 정의: 네마틱 각도 $\theta$의 라플라시안, 활성 수 $A$의 역수로 스케일링됨.
- 물리적/논리적 역할: 이 항은 네마틱 디렉터 장의 공간적 변화(왜곡)를 저항하는 탄성 토크를 나타냅니다. 이는 방향의 급격한 변화를 부드럽게 하려는 복원력 역할을 합니다. 활성 수 $A = L^2/l_a^2$는 시스템 크기 $L$과 능동 길이 $l_a = \sqrt{K/(|\zeta|R)}$(능동 및 탄성 네마틱 응력 간의 균형)을 비교합니다. 더 큰 $A$는 탄성 저항에 비해 능동 강제력이 상대적으로 강하다는 것을 의미합니다.
- 왜 $\nabla^2$인가: 라플라시안은 공간 기울기를 최소화하려는 확산 또는 탄성 힘을 위한 표준 수학적 연산자입니다.
-
$h_\parallel$:
- 수학적 정의: 프랑크 자유 에너지와 관련된 방향 필드 $h_\alpha$의 평행 성분. 구체적으로, $h_\parallel = \frac{1}{A}\nabla^2\theta$ (Eq. (7) 및 Eq. (8)의 맥락에서).
- 물리적/논리적 역할: 이 항은 디렉터에 작용하는 탄성 토크를 나타내며, 최소 탄성 왜곡 상태로 구동합니다. 이것은 LHS의 $\frac{1}{A}\nabla^2\theta$ 항과 동일한 탄성 복원력입니다. 그러나 여기서는 소스 항으로 명시적으로 표시됩니다. (8)의 논문 공식은 효과적으로 탄성 토크 항을 결합합니다.
- 왜 덧셈인가: RHS의 항들은 디렉터 회전의 소스 또는 싱크이며, $\theta$의 전반적인 변화에 기여합니다.
-
$\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$:
- 수학적 정의: 흐름 정렬 매개변수 $\nu$와 네마틱 방향 텐서 $\tilde{g}_{\alpha\beta}$ 및 흐름 함수 $\psi$의 두 번째 도함수를 포함하여 스케일링된 흐름 정렬 항.
- 물리적/논리적 역할: 이 항은 신장 흐름(전단)으로 인한 네마틱 디렉터의 재정렬을 설명합니다. 이는 변형률 텐서( $\partial_\alpha\partial_\beta\psi$에서 파생됨)의 변형률 필드가 네마틱 막대를 정렬하거나 텀블링하게 만드는 방식을 포착합니다. 이것은 중요한 결합 항입니다.
- 왜 곱인가: 이것은 흐름 정렬 매개변수, 네마틱 방향 및 변형률 텐서의 곱이며, 이러한 요인이 결합하여 재정렬 토크를 생성하는 방식을 반영합니다.
주요 무차원 매개변수:
- $L$: 시스템 크기 (길이 스케일).
- $\tau_a = \eta/|\zeta|$: 능동 시간 스케일.
- $K$: 프랑크 탄성 상수.
- $\eta$: 전단 점도.
- $\gamma$: 회전 점도.
- $\zeta$: 능동 응력 매개변수.
- $A = L^2/l_a^2 = RL^2|\zeta|/K$: 활성 수. 시스템 크기와 능동 길이 $l_a$를 비교합니다. 큰 $A$는 탄성 저항에 비해 강한 능동 강제력을 나타냅니다.
- $R = \gamma/\eta$: 점도 비율.
- $\nu$: 흐름 정렬 매개변수.
단계별 흐름
각 위치와 시간에 대한 능동 네마틱 시스템의 상태를 나타내는 단일 추상 데이터 포인트를 상상해 보세요. 이 상태는 주로 국소 네마틱 디렉터 각도 $\theta$와 유체 흐름 함수 $\psi$에 의해 정의됩니다. 시스템은 이러한 데이터 포인트를 처리하는 기계적 조립 라인과 같은 수치 시뮬레이션을 통해 반복적으로 진화합니다.
-
초기 상태 입력: 주어진 시간 단계 $n$에서 전체 공간 격자에 걸쳐 현재 네마틱 각도 필드 $\theta^n$ 및 흐름 함수 필드 $\psi^n$을 가지고 있습니다.
-
운동량 균형 계산 (방정식 6 / A1):
- 시스템은 먼저 유체 흐름을 업데이트하는 데 집중합니다. 현재 네마틱 각도 $\theta^n$을 가져와 능동 응력($S(d_1 \sin 2\theta^n + d_2 \cos 2\theta^n)$ 항)과 흐름 정렬/Ericksen 응력($-\frac{R\nu}{A}(d_1 \cos 2\theta^n \nabla^2\theta^n - d_2 \sin 2\theta^n \nabla^2\theta^n)$ 항, 이는 (A1)의 RHS의 일부임)을 계산하는 데 사용합니다. 이러한 항은 유체를 구동하는 "강제 함수" 역할을 합니다.
- 이러한 강제 함수는 운동량 균형 방정식에 입력되며, 이는 $\psi$에 대한 복이차 방정식입니다. 이 방정식은 유사 스펙트럼 방법을 사용하여 해결됩니다. 이는 공간 미분이 푸리에 공간에서 매우 효율적으로 계산된다는 것을 의미합니다.
- 중요하게도, (A1)의 LHS에 있는 $G(\theta^n, \psi^n)$ 항(흐름 정렬 응력의 일부)은 $\psi$ 자체에 의존합니다. 이를 처리하기 위해 고정점 반복이 사용됩니다. 즉, $\psi$에 대한 초기 추측(종종 이전 시간 단계에서 가져옴)이 $G$를 계산하는 데 사용되고, 그런 다음 새로운 $\psi$에 대해 방정식이 해결됩니다. 이 과정은 해당 시간 단계에 대한 계산된 $\psi$가 안정적인 값으로 수렴할 때까지 반복되어 흐름과 그로 인해 발생하는 응력 간의 자체 일관성을 보장합니다.
- $\psi^n$이 결정되면 보조 흐름 필드(예: 속도 성분 $v_x, v_y$, 와도 $\omega$, 흐름 정렬 회전 $C^n$)가 $\psi^n$에서 계산됩니다.
-
디렉터 역학 계산 (방정식 8 / A4):
- 다음으로 시스템은 네마틱 디렉터를 업데이트하는 데 주의를 기울입니다. 새로 계산된 흐름 필드($v_x, v_y$)와 현재 네마틱 각도 $\theta^n$을 가져옵니다.
- 디렉터 역학 방정식 (8)은 $\theta$가 어떻게 변하는지 설명합니다. 대류 항($\epsilon_{\alpha\beta}\partial_\alpha\psi \partial_\beta\theta$)은 유체 흐름에 의해 디렉터가 어떻게 이류되는지를 결정합니다. 탄성 항($\frac{1}{A}\nabla^2\theta$)은 디렉터 왜곡을 부드럽게 하려는 경향이 있습니다. RHS 항($h_\parallel + \nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$)은 신장 흐름으로 인한 탄성 토크와 재정렬을 나타냅니다.
- 이 방정식은 유한 요소 방법을 사용하여 해결됩니다. 대류 항은 안정성을 위해 특성-갈레르킨 방법을 사용하여 별도로 처리되며, 이는 효과적으로 유체 요소의 경로를 추적합니다. 탄성(라플라시안) 항은 암시적으로 처리되며, 이는 수치적 안정성을 보장하기 위해 새로운 $\theta^{n+1}$과 함께 해결된다는 것을 의미합니다. 특히 강성 항의 경우(주의 깊게 처리하지 않으면 빠른 변화를 일으킬 수 있는 탄성 힘).
- 결과는 업데이트된 네마틱 각도 필드 $\theta^{n+1}$입니다.
-
시간 단계 진행: 시스템은 시간을 $n$에서 $n+1$로 증가시키고, 전체 프로세스가 반복되며, $\theta^{n+1}$ 및 $\psi^{n+1}$을 새로운 입력으로 사용합니다.
이 반복적이고 결합된 프로세스를 통해 시스템은 진화하며, 유체 흐름과 네마틱 방향은 지속적으로 서로 영향을 미쳐 능동 난류 또는 정체된 상태와 같은 복잡한 패턴과 동적 상태를 초래합니다.
최적화 역학
여기서 "최적화 역학"은 손실 함수를 최소화하는 경사 하강법과 같은 전통적인 기계 학습 최적화보다는 수치적 해의 반복과 시스템의 장기적인 물리적 진화가 안정적이거나 준안정적인 상태로 이어지는 것을 더 많이 의미합니다.
-
각 시간 단계에서의 수치적 수렴:
- 흐름 함수에 대한 고정점 반복: 각 시간 단계 내에서 흐름 함수 $\psi$에 대한 운동량 균형 방정식(A1)은 고정점 방법을 사용하여 반복적으로 해결됩니다. 즉, $\psi$에 대한 초기 추측이 비선형 항을 계산하는 데 사용되고, 그런 다음 새로운 $\psi$가 계산됩니다. 이 새로운 $\psi$는 다음 반복의 입력이 되고, 프로세스는 연속적인 $\psi$ 솔루션 간의 차이가 작은 계산 허용 오차(예: $10^{-8}$) 아래로 떨어질 때까지 반복됩니다. 이는 유체 흐름 필드가 해당 순간의 네마틱 디렉터에 의해 생성된 응력과 자체 일관성을 갖도록 보장합니다. 여기서 "손실 지형"은 방정식의 잔차 오차이며, 반복은 그 "최소값"(0 잔차)을 찾으려고 합니다.
- 디렉터 역학에 대한 암시적 처리: 디렉터 역학 방정식(A4)의 경우, 라플라시안(탄성) 항은 암시적으로 처리됩니다. 즉, 다음 시간 단계의 $\theta$ 값, $\theta^{n+1}$은 $\theta^n$에서 명시적으로 계산하는 대신 직접 해결됩니다. 이 접근 방식은 특히 강성 항(주의 깊게 처리하지 않으면 빠른 변화를 일으킬 수 있는 탄성 힘)을 다룰 때 수치적 안정성을 향상시킵니다. 이는 현재 흐름을 고려하여 방정식을 만족하는 안정적인 $\theta^{n+1}$로 효과적으로 "수렴"합니다.
-
물리적 시스템 진화 및 "학습":
- 반복적 상태 업데이트: 전체 시뮬레이션은 시간 단계를 반복적으로 업데이트하여 $\theta$ 및 $\psi$ 필드를 진행합니다. 이 흐름과 디렉터 역학 간의 지속적인 피드백 루프는 시스템의 진화를 구동합니다.
- 손실 지형 (암시적): 명시적으로 손실 함수로 정의되지는 않지만, 시스템의 역학은 복잡한 "에너지 지형"(예: 프랑크 자유 에너지, 벌크 자유 에너지)을 탐색하는 것으로 생각할 수 있습니다. 시스템은 자연스럽게 이러한 에너지를 최소화하는 상태로 진화하거나, 능동 시스템에서는 동적으로 유지되는 비평형 상태에 도달합니다.
- 기울기 및 구동력: 방정식의 다양한 항은 "기울기" 또는 구동력 역할을 합니다. 예를 들어, 능동 응력 항($S\partial_\alpha\partial_\beta\tilde{g}_{\alpha\beta}$)은 유체 운동을 구동하고, 탄성 항($\nabla^2\psi$ 및 $\nabla^2\theta$)은 왜곡을 부드럽게 하려는 복원력 역할을 합니다. 흐름 정렬 항($\nu\tilde{g}_{\alpha\beta}\partial_\alpha\partial_\beta\psi$)은 디렉터가 흐름에 어떻게 재정렬되는지를 결정하여 시스템의 반응을 형성합니다.
- 동적 정체로의 수렴: 이 논문의 핵심 발견은 특정 매개변수 영역(예: 신장성 정렬 네마틱, $S\nu < -1$)에서 시스템이 안정적이고 나무 모양의 영역 벽 네트워크로 특징지어지는 동적 정체 상태로 "수렴"한다는 것입니다. 이것은 전역 최소값을 찾는 의미에서의 최적화가 아니라, 시스템이 혼란스러운 흐름이 억제되고 역학이 유리 시스템의 노화 현상과 유사하게 매우 느려지는 비평형 패턴(나무 모양의 영역 벽 네트워크)으로 정착된다는 것을 의미합니다. 시스템은 능동 강제력, 점성 소산, 탄성 토크 및 흐름 정렬의 지속적인 상호 작용을 통해 이러한 안정적인 패턴을 형성하도록 "학습"합니다. "기울기"는 효과적으로 시스템을 이러한 정체된 구성으로 안내합니다.
- 노이즈의 역할: 디렉터 역학(부록 A.4)에 작은 크기의 가우시안 백색 노이즈가 추가되어 완전히 발달된 능동 난류로의 진화를 가속화합니다. 이 노이즈는 섭동 역할을 하여 시스템이 "지형"을 탐색하고 잠재적인 국소 최소값 또는 준안정 상태를 벗어나도록 도와 특성 난류 또는 정체된 영역에 도달하도록 보장합니다.
본질적으로 "최적화"는 능동적인 힘에 의해 구동되고 재료 특성에 의해 제약되는 이 지배 방정식 하에서 진화하려는 물리적 시스템의 자연스러운 경향이며, 특성 동적 또는 정체된 상태에 도달할 때까지입니다. 수치 방법은 이러한 진화가 정확하고 안정적으로 시뮬레이션되도록 보장합니다.
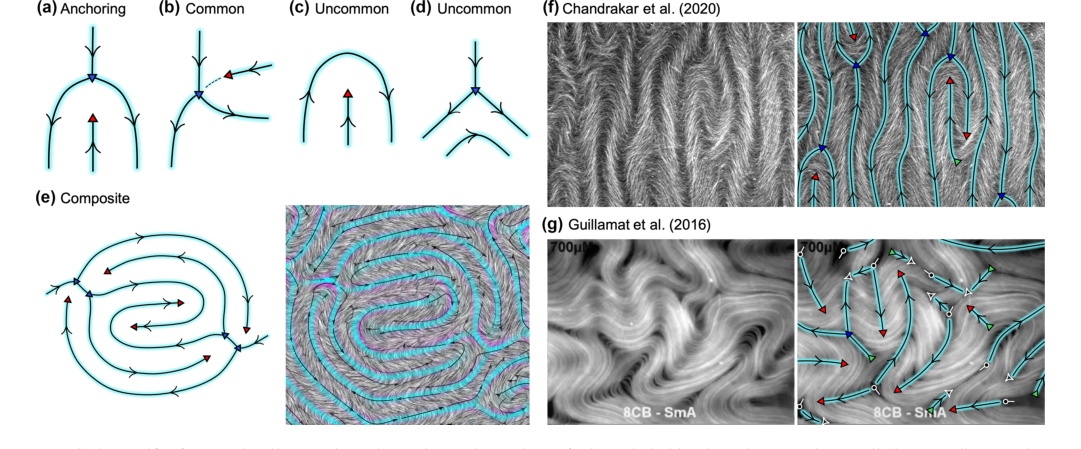 FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
FIG. 4. Motifs of arrested wall networks and experimental snapshots of microtubule-kinesin active nematics. In all diagrams, lines, nodes, and colors are as defined in Fig. 3. (a)–(d) Basic network motifs. The anchoring motif [panel (a)] is made of an endpoint and branchpoint that meet head-on, with the endpoint trapped between the two outgoing walls of the branchpoint. In the motif depicted in panel (b), the endpoint meets the branchpoint from one of its sides, i.e., between the incoming wall and an outgoing wall. The dashed line traces a weak distortion, indicating that the wall associated with the endpoint tends to align its direction with the outgoing wall on the opposite side of the branchpoint. The motifs shown in panels (c) and (d) involve a single pseudodefect interacting with a bare wall. These, along with panel (b), do not follow the tendency to have strictly antiparallel walls. (e) Composite motif schematic (left) and one formed spontaneously in a simulation (right). The stream plot on the right represents the flow, with black indicating maximal |v| and full transparency indicating |v| = 0. The gray background is the line-integral-convolution representation of the nematic director n. Parameter values and color legend for splay and bend distortions are as in Fig. 1(f). (f), (g) Raw fluorescence images from experiments (left panels) and overlaid schematic drawings (right panels) depicting domain walls, pseudodefects, and actual ±1/2 defects in white. (f) Taken from a movie in Ref. [50] (courtesy of Guillaume Duclos), which shows the evolution of the microtubule-based nematic following the bending instability of the aligned state. (g) Taken from a movie in Ref. [51] (courtesy of Pau Guillamat), which shows a turbulent transient with all types of pseudodefects and actual nematic defects. Note how walls may also originate from true +1/2 defects and be absorbed by true −1/2 defects
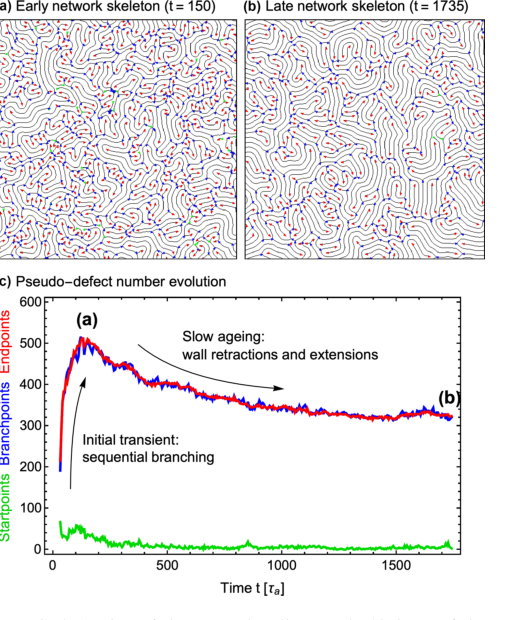 FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
FIG. 5. Ageing of the arrested wall network. Skeleton of the domain walls (black) with startpoints, branchpoints, and endpoints (green, blue, and red triangular nodes) at an early time [panel (a)] and a late time [panel (b)]. The detection of the network skeleton and its nodes is described in Appendix E (Fig. 13). (c) Evolution of the number of startpoints (green), branchpoints (blue), and endpoints (red). In the initial transient, sequential “zigzag” instabilities result in the proliferation of both branchpoints and endpoints. Once the wall pattern establishes a wavelength, the system ages slowly as some endpoints retract and annihilate with their connected branchpoint, while others extend (Movie S5 of the Supplemental Material [35]). Throughout the simulation, there are frequent transitions between branchpoints and startpoints, though the number of startpoints re- mains low. Additionally, the detection algorithm is not perfect, occasionally misidentifying endpoints or branchpoints as startpoints and vice versa. Parameter values were set to R = 1, S = 1, ν = −0.9, and A = 3.2 × 105
결과, 제약 조건 및 결론
실험 설계 및 기준선
저자들은 능동 네마틱 난류의 역학, 특히 위상 결함과 흐름 정렬의 역할을 엄격하게 조사하기 위해 수치 실험을 세심하게 설계했습니다. 그들의 주요 도구는 두 가지 주요 모델을 사용하는 대규모 수치 시뮬레이션이었습니다.
첫째, 흐름 정렬과 Ericksen 응력을 통합하여 이전 연구를 일반화한 디렉터 기반 결함 없는 모델이 사용되었습니다. 이 모델은 방정식 (6)-(8)에 의해 지배되며, 모듈러스가 고정된 연속적인 디렉터 장을 강제함으로써 위상 결함의 형성을 본질적으로 방지합니다. 이 구조적 선택은 결함의 혼란스러운 영향 없이 영역 벽의 역학을 분리하는 데 중요했습니다. 이 모델의 주요 무차원 매개변수에는 활성 수 $A = L^2/l_a^2$, 점도 비율 $R = \gamma/\eta$, 흐름 정렬 매개변수 $\nu$가 포함되었습니다. 대부분의 시뮬레이션에서 $R=1$ 및 $A=3.2 \times 10^5$이 설정되었으며, 이는 $\nu=0$일 때 대규모 능동 난류를 나타내는 영역입니다. 실험은 특히 두 가지 다른 영역을 비교하도록 설계되었습니다.
1. 수축성 흐름 정렬($Sv > 1$): $S=-1$(수축성 응력) 및 $\nu=-1.1$(흐름 정렬 막대)로 예시됩니다. 이것은 "강한 대규모 난류"의 기준선 역할을 했습니다.
2. 신장성 흐름 정렬($Sv < -1$): $S=+1$(신장성 응력) 및 $\nu=-1.1$을 사용합니다. 이 영역은 "정체된 난류"를 나타낼 것으로 가정되었습니다.
$\nu=0$(비정렬)의 참조 사례도 포함되었으며, 여기서 수축성 및 신장성 응력은 회전까지 동등하여 비정렬 기준선에 대한 중립적인 기준선을 제공했습니다.
둘째, 연구 결과를 넓히고 결함이 있는 역학으로의 전환을 탐색하기 위해 제약 없는 Q-텐서 모델이 사용되었습니다. 이 모델은 Beris-Edwards 모델에 기반한 Landau-de Gennes 프레임워크(부록 D에 자세히 설명됨)를 기반으로 하며, 실제 $\pm 1/2$ 위상 결함의 핵 생성을 명시적으로 허용했습니다. 여기서 중요한 제어 매개변수는 결함 코어 크기 $\epsilon$과 능동 길이 $l_a$의 비율이었습니다. 이 모델을 사용한 시뮬레이션은 $R=1$, $S=1$, $A=10000$, $\nu=-1$을 사용했으며, 작은 각도 섭동을 가진 잔잔한 네마틱 상태에서 시작되었습니다.
수치 적분은 운동량 균형(Eq. (6))을 위한 유사 스펙트럼 방법과 각도 장 진화(Eq. (8))를 위한 유한 요소 방법(FEM)을 결합한 하이브리드 체계를 사용했습니다(부록 A에 설명됨). 작은 크기의 가우시안 백색 노이즈가 완전히 발달된 능동 난류로의 진화를 가속화하기 위해 도입되었습니다. 저자들이 차별화하거나 패배시키고자 했던 "희생자"(기준선 모델)는 주로 $\nu=0$ 비정렬 사례와 수축성 흐름 정렬 영역에서 관찰된 강한 대규모 난류였습니다. Q-텐서 모델은 또한 결함 없는 모델의 예측의 견고성을 테스트하는 엄격한 테스트 역할을 했습니다.
증거가 입증하는 바
이 논문에서 제시된 증거는 결함 없는 능동 네마틱 난류가 안정적이고 나무 모양의 네마틱 영역 벽 네트워크로 특징지어지는 놀라운 동적 정체를 겪을 수 있음을 확실하게 입증합니다. 이 네트워크는 일관된 흐름을 채널링하고 혼란스러운 움직임을 억제합니다.
동적 정체의 핵심 메커니즘은 신장성 흐름 정렬 영역(Sv < -1)을 수축성 흐름 정렬 영역(Sv > 1) 및 $\nu=0$ 참조 사례와 비교함으로써 무자비하게 입증되었습니다. 수축성 정렬 영역에서 시뮬레이션(그림 1a-1c, 동영상 S1)은 강한 일시적인 대규모 제트와 파편화되고 동적으로 재구성되는 네마틱 영역 벽을 가진 매우 혼란스러운 흐름을 보여주었습니다. 이것은 "강한 대규모 난류"의 기준선을 나타냈습니다. 극명한 대조적으로, 신장성 정렬 영역(그림 1d-1f, 동영상 S2)은 훨씬 약한 대규모 흐름을 나타냈으며, 지배적인 흐름은 구부러진 영역 벽을 따라 국소화되었습니다. 결정적으로, 이러한 영역 벽은 강하게 안정화되어 성장하고 지속적이고 공간을 채우는 나무 모양 패턴으로 분기되어 "격자화"되었습니다. 이는 동적 정체라고 불리는 상태입니다.
이러한 정체된 상태에 대한 결정적이고 부인할 수 없는 증거는 스펙트럼 분석에서 나왔습니다(그림 1g-1i).
* 속도 파워 스펙트럼 (그림 1g): 두 영역 모두 낮은 파수에서 보편적인 $q^{-1}$ 스케일링을 나타냈지만, 수축성 사례는 대규모 제트와 관련된 광범위한 스케일을 보여주었습니다. 그러나 정체된 신장성 사례는 더 좁은 $q^{-1}$ 범위와 더 짧은 길이 스케일에서의 뚜렷한 피크를 보여주어 대규모 혼란스러운 흐름에 대한 국소화된 벽 흐름의 지배력을 확인했습니다.
* 프랑크 에너지 스펙트럼 (그림 1h): 신장성(정체된) 사례는 훨씬 더 좁고 날카로운 피크를 보여주어 혼란스러운 수축성 영역에서의 넓은 피크와 달리 매우 조직적이고 안정적인 벽 패턴을 나타냈습니다.
* 상관 시간 스펙트럼 (그림 1i): 이것은 아마도 가장 설득력 있는 증거였을 것입니다. 정체된 영역은 특히 대규모에서 흐름 및 네마틱 텐서 필드의 상관 시간이 훨씬 더 길었습니다. 이것은 감소된 역학과 패턴의 "잠김"을 직접적으로 정량화하여 시스템이 실제로 동적 정체를 겪었음을 입증했습니다.
추가 증거는 이러한 정체된 상태의 창발적 위상을 강조했습니다. 영역 벽은 "가짜 결함"(시작점, 분기점, 끝점)을 형성했으며, 이는 진정한 위상 결함은 아니지만 보존된 가짜 전하를 운반했습니다(그림 3). 시뮬레이션은 초기 줄무늬 패턴에서 지그재그 불안정성 및 벽 분기를 거쳐 최종 격자화된 나무 모양 패턴으로의 동적 진화를 보여주었습니다(그림 2). "고정 모티프"(그림 4a), 즉 가짜 결함의 특정 배열은 흐름을 "함정"으로 작용하는 특히 안정적인 구조로 식별되었습니다. 장기 시간에 걸친 가짜 결함 수의 느린 완화(그림 5c)는 유리 시스템의 노화 현상을 연상시키며, 이는 상태의 정체된 특성을 더욱 강조합니다. 또한, 정체된 패턴은 다른 시스템에서는 드문 패턴인 "단일 경로 미로"(그림 6b)를 둘러싸고 있음을 보여주어 독특한 패턴 형성 현상을 보여주었습니다.
Q-텐서 모델을 사용하여 정체의 견고성이 검증되었습니다. 이 모델은 결함 핵 생성이 에너지적으로 억제될 때(즉, $\epsilon/l_a$가 작을 때) 정체가 결함 없는 제약 조건의 인위적인 것이 아니라 일반적인 특징임을 확인했습니다. 결함 코어 크기 $\epsilon$이 임계값($\approx 0.25 l_a$)을 초과함에 따라 실제 $\pm 1/2$ 결함이 핵 생성되기 시작했으며(그림 7b, 7e, 7f), 정체된 벽 패턴을 방해하고 시스템을 무질서하고 소용돌이 중심의 난류 상태로 전환했습니다. 이 전환은 총 탄성 자유 에너지의 극적인 감소(그림 7b, 12c)를 동반했으며, 결함은 고에너지 영역 벽을 효율적으로 용해시켰습니다. 시뮬레이션은 또한 분기점 가짜 결함이 결함 핵 생성의 "핫스팟" 역할을 함을 보여주었습니다(동영상 S8). 이는 결함 없는 영역과 결함이 있는 영역 간의 명확한 연결을 설정했습니다. 작은 $\epsilon/l_a$에서의 Q-텐서 모델과 제약된 $\theta$ 모델 간의 정량적 일치(그림 11, 동영상 S6)는 해당 극한에서 더 간단한 모델의 유효성을 더욱 공고히 했습니다.
제약 조건 및 향후 방향
이 작업은 능동 네마틱 난류에 대한 심오한 통찰력을 제공하지만, 여러 제약 조건과 수많은 미래 연구 기회를 강조합니다.
한 가지 중요한 제약 조건은 동적 정체의 실험적 실현입니다. 이 논문은 이 주요 예측이 아직 실험에서 관찰되지 않았다고 명시적으로 명시합니다. 이를 달성하려면 위상 결함 핵 생성의 에너지 비용이 현재 실험 설정보다 훨씬 높은 능동 재료가 필요합니다. 이는 재료 과학 혁신, 아마도 결함 형성을 억제하는 새로운 분자 설계 또는 환경 제어를 통해 이루어져야 함을 시사합니다.
또 다른 탐구 영역은 시스템 크기 효과에 관한 것입니다. 대규모 시뮬레이션이 수행되었지만, 저자들은 더 큰 시스템에서 빈번한 파열이 정체된 벽 네트워크의 지속적이고 시스템 전반의 연결성을 방해했다고 언급합니다(동영상 S9). 이는 시스템 크기가 커짐에 따라 정체된 상태가 불안정해질 수 있음을 시사하며, 이는 벽 네트워크를 방해할 수 있는 혼란스러운 대규모 흐름의 강도가 증가하기 때문일 수 있습니다. 향후 작업은 이 안정성 경계를 매핑하고 매우 큰 규모에서의 파열 메커니즘을 이해하는 것을 목표로 해야 합니다.
비선형 파장 선택 메커니즘은 여전히 열린 질문입니다. 이 논문은 이 메커니즘이 비선형적이고 2차원적이며, 그 정확한 의존성이 아직 완전히 이해되지 않았음을 인정합니다. 이 복잡한 상호 작용을 풀기 위해서는 더 깊은 이론적 및 계산적 연구가 필요합니다.
또한, 관찰된 결함 밀도의 비단조적 코어 크기 의존성(일부 영역에서 코어 크기 증가에 따라 감소)은 흥미롭지만 완전히 설명되지 않았으며, 향후 작업으로 이월되었습니다. 이는 현재 이해보다 결함 에너지와 패턴 형성 간의 더 복잡한 관계를 시사합니다. 매우 작은 결함 코어 크기에서의 Q-텐서 시뮬레이션의 계산 비용 또한 실질적인 제약이며, 해당 영역에서는 더 간단한 $\theta$ 모델을 필요한 대안으로 만듭니다.
미래를 내다볼 때, 몇 가지 논의 주제가 등장합니다.
- 결함 없는 능동 네마틱 시스템 설계: 흐름 정렬 및 결함 코어 크기에 대한 이해를 활용하여 본질적으로 결함 형성을 억제하여 동적 정체를 촉진하는 능동 네마틱 시스템을 어떻게 설계할 수 있습니까? 여기에는 재료 특성, 활성 수준 또는 구속 기하학을 조정하는 것이 포함될 수 있습니다.
- 가짜 결함과 진정한 결함의 상호 작용: 가짜 결함과 진정한 위상 결함이 공존하는 전환 영역은 풍부하며 추가 조사가 필요합니다. 진정한 결함은 벽의 시작점 또는 끝점 역할을 할 수 있는데, 어떻게 가짜 결함 네트워크와 상호 작용합니까? 이 상호 작용을 제어하여 정체된 상태와 난류 상태를 전환할 수 있습니까?
- 장거리 위상 질서의 본질: 정체된 상태에서 관찰된 단일 경로 미로는 장거리 위상 질서의 한 형태를 시사합니다. 이 질서의 수학적 및 물리적 속성은 무엇입니까? 이는 응집 물질 시스템의 다른 형태의 위상 질서와 어떻게 비교되며, 재료 특성에 대한 그 영향은 무엇입니까?
- 유리 시스템 및 노화와의 유사성: 정체된 벽 네트워크의 느린 완화 역학은 유리 시스템의 노화 현상과 유사점을 공유합니다. 유리 물리학의 통찰력을 사용하여 정체된 능동 네마틱의 안정성, 완화 및 섭동에 대한 반응을 더 잘 이해할 수 있습니까?
- 구성 요소 고갈의 영향: 이 논문은 네마틱 구성 요소가 실험에서 결함에서 고갈되는 것으로 관찰되었으며, 이는 결함 에너지 비용을 낮출 수 있다고 언급합니다. 이를 향후 모델에 통합하면 결함 핵 생성 및 벽 네트워크 안정성에 대한 영향에 대한 더 정확한 그림을 제공할 수 있습니다.
- 3차원으로의 일반화: 이 연구는 2D 시스템에 초점을 맞췄지만, 3차원으로의 분석 확장은 자연스러운 다음 단계가 될 것입니다. 유사한 동적 정체 현상 또는 가짜 위상 구조가 3D 능동 네마틱에서 나타날 것이며, 그 속성은 어떻게 다를까요?
이러한 미래 방향은 이론 물리학자, 재료 과학자 및 실험가 간의 협업을 요구하는 이 분야의 학제 간 성격을 강조하며, 능동 네마틱 시스템의 복잡성을 완전히 밝혀내기 위해 노력합니다.
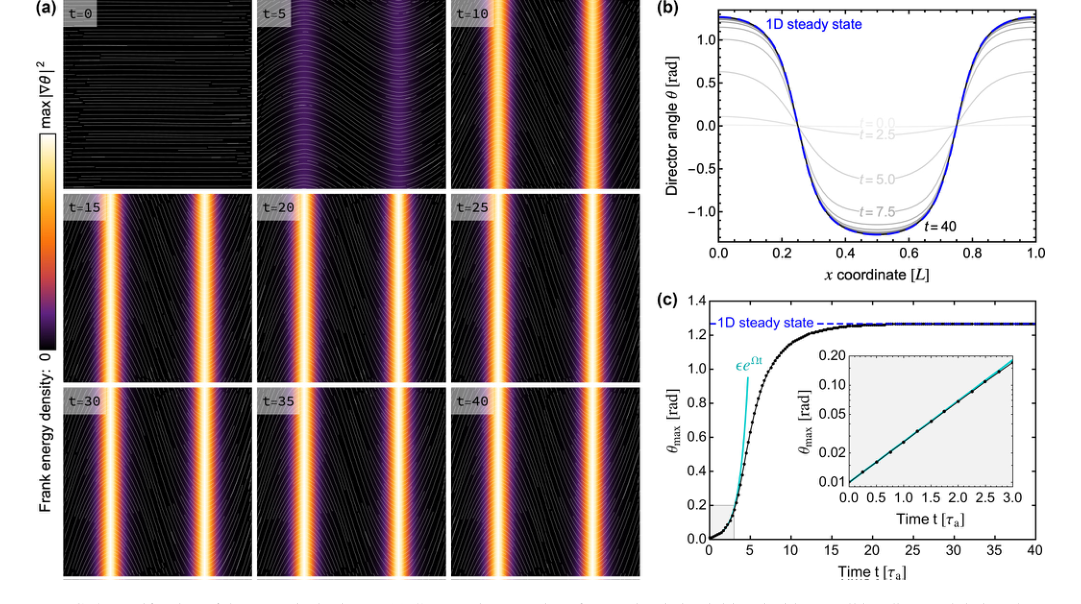 FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
FIG. 8. Verification of the numerical scheme. (a) Consecutive snapshots from a simulation initiated with a small bending modulation about the uniformly aligned state: θ(r,t = 0) = ϵ cos(2πx), with ϵ = 0.01. Parameter values were set to R = 1, ν = −1.1, A = 1000, and S = 1 (extensile stress). Numerical parameters were set to N = 64, dt = 0.01, and D = 0 (zero noise). Color indicates the Frank energy, |∇θ|2, and white lines trace the director n. (b) We plot the numerical data corresponding to a horizontal slice, θ(x, y = 0), for increasing times, starting from t = 0 (lightest gray) up to t = 40τa (black) in intervals of 2.5τa. It is shown that the angle profile relaxes on the predicted 1D steady state (dashed blue), obtained for the same parameter values as explained in our recent work [38]. (c) The maximum angle is plotted as a function of time in our simulation (black). First, it is shown that the modulation grows exponentially in time with the growth rate ? matching the linear stability dispersion relation [38] (cyan). The gray inset is a log-scale plot comparing the simulation results with this explicit prediction for small perturbations. Additionally, it is demonstrated that the maximal angle in the simulation relaxes at long times to the value predicted by the 1D steady state [38] (dashed blue)
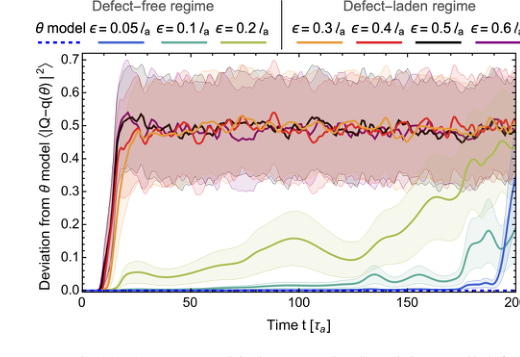 FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]
FIG. 11. Agreement with the constrained model at small defect core size. For all simulations shown in Fig. 7, which share the same initial conditions and parameters except for ϵ, we plot the space- averaged deviation of the nematic tensor Q from that corresponding to the reference θ model simulation. Shaded regions indicating the standard deviation. As ϵ decreases, quantitative agreement (low deviation) persists systematically for longer integration times. A deviation of ∼0.5 corresponds to complete statistical decorrelation. See also Movie S6 of the Supplemental Material [35]