निंग्शिया, चीन में ब्रुसेलोसिस की विभेदित इष्टतम नियंत्रण रणनीति: एक दो-पैच गतिकीय मॉडल से अंतर्दृष्टि
इस पत्र में संबोधित समस्या ब्रुसेलोसिस, एक जूनोटिक संक्रामक रोग की लगातार और स्थानिक रूप से विषम प्रकृति से उत्पन्न होती है, विशेष रूप से निंग्शिया, चीन जैसे उच्च-घटना वाले क्षेत्रों में। ऐतिहासिक रूप से, ब्रुसेलोसिस...
पृष्ठभूमि और अकादमिक वंश
उत्पत्ति और अकादमिक वंश
इस पत्र में संबोधित समस्या ब्रुसेलोसिस, एक जूनोटिक संक्रामक रोग की लगातार और स्थानिक रूप से विषम प्रकृति से उत्पन्न होती है, विशेष रूप से निंग्शिया, चीन जैसे उच्च-घटना वाले क्षेत्रों में। ऐतिहासिक रूप से, ब्रुसेलोसिस एक वैश्विक चिंता का विषय रहा है, जिसमें भूमध्यसागरीय, मध्य पूर्व और एशिया के कुछ हिस्सों सहित क्षेत्रों में महत्वपूर्ण प्रसार देखा गया है, जैसा कि प्रारंभिक साहित्य [1] में उल्लेख किया गया है। चीन में, इस बीमारी ने 1990 के दशक के मध्य से एक उल्लेखनीय पुनरुत्थान का अनुभव किया, 2014 में चरम पर पहुंच गया, और इसका भौगोलिक प्रसार पारंपरिक देहाती क्षेत्रों से कृषि और यहां तक कि दक्षिणी तटीय क्षेत्रों तक फैल गया [3]। इस विस्तार ने बीमारी के दोहरे खतरे को उजागर किया: जानवरों में बांझपन और उत्पादन में कमी के कारण पशुधन उद्योग को भारी आर्थिक नुकसान पहुंचाना [4, 5], जबकि विश्व स्तर पर सालाना लाखों मानव मामलों की रिपोर्ट के साथ एक गंभीर सार्वजनिक स्वास्थ्य जोखिम भी पैदा करना [2]।
इस विशिष्ट समस्या का उद्भव इस अवलोकन से उपजा है कि ब्रुसेलोसिस संचरण महत्वपूर्ण स्थानिक-कालिक विषमता और क्लस्टरिंग प्रदर्शित करता है [6, 7]। अंतर-क्षेत्रीय पशुधन आंदोलन जैसे कारक, विशेष रूप से उच्च-जोखिम वाले क्षेत्रों से निम्न-जोखिम वाले क्षेत्रों में [8], और वायुमंडलीय दबाव और तापमान [9] जैसी पर्यावरणीय स्थितियां, इसके प्रसार को गहराई से प्रभावित करती हैं। पिछले महामारी विज्ञान अनुसंधान ने मुख्य रूप से भविष्यवाणी के लिए सांख्यिकीय मॉडल पर भरोसा किया। हालांकि, ये मॉडल विभिन्न स्थानों और समय के साथ मानव गतिविधियों और प्राकृतिक वातावरण के साथ महामारी की जटिल, गतिशील अंतःक्रियाओं को पकड़ने में सीमित साबित हुए। इस मौलिक सीमा ने उच्च-जोखिम वाले क्षेत्रों को सटीक रूप से पहचानने और रोकथाम और नियंत्रण के लिए विभेदित संसाधनों के आवंटन की सुविधा के लिए एक अधिक परिष्कृत दृष्टिकोण की तत्काल आवश्यकता पैदा की। इसलिए, गतिकीय मॉडलिंग स्थानिक विषमता के प्रभावों को मापने और इष्टतम, अनुरूप रोकथाम रणनीतियों को तैयार करने के लिए एक आवश्यक उपकरण बन गया [10-12]। यह पत्र विशेष रूप से निंग्शिया पर केंद्रित है, जो भेड़ों में बी. मेलिटेंसिस द्वारा संचालित एक गंभीर ब्रुसेलोसिस महामारी वाला क्षेत्र है [26], जिसका उद्देश्य सीमित स्वास्थ्य संसाधनों को देखते हुए सटीक, विभेदित नियंत्रण रणनीतियों के लिए एक मात्रात्मक आधार प्रदान करना है।
सहज डोमेन शब्द
- ब्रुसेलोसिस (Brucellosis): एक बहुत ही लगातार "पशु फ्लू" की कल्पना करें जो संक्रमित जानवरों (जैसे भेड़) से मनुष्यों में आसानी से फैल सकता है, जिससे दोनों में लंबे समय तक बीमारी हो सकती है। किसानों के लिए, यह एक दोहरा झटका है: उनके जानवर बीमार हो जाते हैं, जिससे गर्भपात और कम दूध/मांस होता है, और वे स्वयं भी इसे पकड़ सकते हैं।
- स्थानिक-कालिक विषमता (Spatial-temporal heterogeneity): सोचें कि बीमारी एक समान कोहरे की तरह नहीं फैल रही है, बल्कि एक धब्बेदार, बदलती तूफान की तरह फैल रही है। यह कुछ कस्बों में दूसरों की तुलना में बहुत खराब है, और इसकी तीव्रता मौसम के साथ या कई वर्षों में बदलती रहती है। इसका मतलब है कि बीमारी हर समय हर जगह एक ही ताकत से नहीं है।
- पैच मॉडल (Patch model): एक क्षेत्र के नक्शे की कल्पना करें जिसे कुछ अलग-अलग क्षेत्रों या "पड़ोस" में विभाजित किया गया है। एक पैच मॉडल यह ट्रैक करने जैसा है कि बीमारी प्रत्येक पड़ोस के भीतर कैसे फैलती है और यह उनके बीच कैसे चलती है, यह स्वीकार करते हुए कि प्रत्येक क्षेत्र में अलग-अलग स्थितियां या जोखिम स्तर हो सकते हैं।
- बुनियादी प्रजनन संख्या ($R_0$) (Basic reproduction number ($R_0$)): यह एक बीमारी के लिए "संक्रमण स्कोर" की तरह है। यदि एक बीमार जानवर, औसतन, एक से अधिक अन्य जानवरों को संक्रमित करता है, तो स्कोर 1 से ऊपर होता है, और बीमारी फैलने की संभावना होती है। यदि यह एक से कम को संक्रमित करता है, तो स्कोर 1 से नीचे होता है, और बीमारी अंततः समाप्त हो जाएगी।
- इष्टतम नियंत्रण रणनीति (Optimal control strategy): सीमित सैनिकों और आपूर्ति के साथ युद्ध जीतने की कोशिश कर रहे एक जनरल पर विचार करें। एक इष्टतम नियंत्रण रणनीति सबसे अच्छी संभव युद्ध योजना है जो जनरल को ठीक-ठीक बताती है कि जीत (बीमारी को कम करना) को सबसे प्रभावी ढंग से प्राप्त करने के लिए अपने संसाधनों (जैसे, टीके, आंदोलन प्रतिबंध) को कब, कहां और कितना तैनात करना है।
संकेतन तालिका
| संकेतन | विवरण |
|---|---|
समस्या परिभाषा और बाधाएँ
मुख्य समस्या सूत्रीकरण और दुविधा
इस पत्र में संबोधित मुख्य समस्या निंग्शिया, चीन में ब्रुसेलोसिस के लिए प्रभावी और विभेदित इष्टतम नियंत्रण रणनीतियों का विकास है, जो एक उच्च घटना और बीमारी की महत्वपूर्ण स्थानिक-कालिक विषमता की विशेषता वाला क्षेत्र है।
इनपुट या वर्तमान स्थिति एक जटिल महामारी विज्ञान की स्थिति है जहां ब्रुसेलोसिस संचरण विशिष्ट स्थानिक-कालिक पैटर्न प्रदर्शित करता है, जिससे उच्च-जोखिम वाले और निम्न-जोखिम वाले क्षेत्र बनते हैं (जैसा कि चित्र 1 में दर्शाया गया है)। रोकथाम और नियंत्रण के लिए स्वास्थ्य संसाधन सीमित हैं, जिससे समान हस्तक्षेप रणनीतियाँ अक्षम और अक्सर अव्यवहारिक हो जाती हैं। इसके अलावा, क्षेत्रों के बीच पशुधन आंदोलन बीमारी के प्रसार का एक ज्ञात चालक है, जिससे नियंत्रण के प्रयास जटिल हो जाते हैं। पिछले शोध, मुख्य रूप से सांख्यिकीय मॉडल पर निर्भर करते हुए, जटिल स्थानिक-कालिक गतिशीलता और मानव गतिविधियों और प्राकृतिक वातावरण के साथ अंतःक्रियाओं को पकड़ने के लिए संघर्ष किया है। जबकि टीकाकरण उपलब्ध है और कुछ हद तक प्रभावी है (जैसे, लगभग 65% प्रभावकारिता वाला M5 टीका), संसाधन की कमी के कारण सभी क्षेत्रों में समान कवरेज प्राप्त करना चुनौतीपूर्ण है।
वांछित अंतिम बिंदु या लक्ष्य स्थिति टीकाकरण संसाधनों के तर्कसंगत आवंटन और प्रभावी परिवहन पर्यवेक्षण को लागू करके उच्च-जोखिम और निम्न-जोखिम दोनों पैच में संचयी संक्रमित भेड़ आबादी को कम करना है। इसके लिए विभिन्न क्षेत्रों के विशिष्ट जोखिम स्तरों के अनुरूप सटीक नियंत्रण रणनीतियों को सूचित करने के लिए एक मात्रात्मक ढांचे की आवश्यकता है।
ठीक गायब कड़ी या गणितीय अंतर जिसे यह पत्र पाटने का प्रयास करता है, वह एक मजबूत, स्थानिक रूप से स्पष्ट गतिकीय मॉडल की कमी है जो स्थानिक विषमता (दो-पैच प्रणाली) और टीकाकरण के प्रभावों को एकीकृत करता है, जो एक इष्टतम नियंत्रण ढांचे के साथ जुड़ा हुआ है। विशेष रूप से, पत्र का उद्देश्य गणितीय रूप से विभेदित हस्तक्षेपों को ध्यान में रखते हुए इष्टतम नियंत्रण समाधानों को प्राप्त करना और उनका मूल्यांकन करना है, जो सामान्य रणनीतियों से परे संसाधन-कुशल, लक्षित दृष्टिकोणों की ओर बढ़ रहा है।
दर्दनाक व्यापार-बंद या दुविधा जिसने पिछले शोधकर्ताओं को फंसाया है, और जिसे यह पत्र नेविगेट करने का प्रयास करता है, वह गंभीर संसाधन सीमाओं के तहत व्यापक रोग नियंत्रण प्राप्त करने की चुनौती है, साथ ही ब्रुसेलोसिस संचरण की अंतर्निहित स्थानिक-कालिक विषमता को संबोधित करना है। अक्सर, एक क्षेत्र में या एक विधि के माध्यम से नियंत्रण में सुधार (जैसे, व्यापक टीकाकरण) के लिए घातीय रूप से अधिक संसाधनों की आवश्यकता होगी, जो बस उपलब्ध नहीं हैं। प्रवासन पैटर्न से दुविधा और बढ़ जाती है: जबकि प्रवासन निम्न-जोखिम वाले पैच में ब्रुसेलोसिस के जोखिम को बढ़ा सकता है, यह उच्च-जोखिम वाले क्षेत्रों में "पतला प्रभाव" भी डाल सकता है (टिप्पणी 2, पृष्ठ 11), जिसका अर्थ है कि सरल, अविभेदित नियंत्रण उपाय अनजाने में कुछ पैच में स्थिति को खराब कर सकते हैं या कीमती संसाधनों का दुरुपयोग कर सकते हैं। लेखक एक संतुलन खोजने का लक्ष्य रखते हैं, यह सुनिश्चित करते हुए कि हस्तक्षेप प्रभावी और संसाधन-कुशल दोनों हों।
बाधाएँ और विफलता मोड
निंग्शिया में ब्रुसेलोसिस को नियंत्रित करने की समस्या को कई कठोर, यथार्थवादी बाधाओं द्वारा अविश्वसनीय रूप से कठिन बना दिया गया है:
-
भौतिक/जैविक बाधाएँ:
- जूनोटिक प्रकृति और संचरण गतिशीलता: ब्रुसेलोसिस मुख्य रूप से संक्रमित जानवरों (भेड़ों) से मनुष्यों में फैलने वाली एक जूनोटिक बीमारी है, जिससे नियंत्रण के प्रयास जटिल हो जाते हैं क्योंकि वे पशु स्वास्थ्य और सार्वजनिक स्वास्थ्य दोनों को शामिल करते हैं। छोटे जुगाली करने वाले जानवरों में सबसे रोगजनक प्रजाति, बी. मेलिटेंसिस, निंग्शिया में प्रचलित है (पृष्ठ 3)।
- स्थानिक-कालिक विषमता: ब्रुसेलोसिस की घटना स्थान और समय के पार महत्वपूर्ण भिन्नता दिखाती है, जिससे एक समान दृष्टिकोण के बजाय एक विभेदित दृष्टिकोण की आवश्यकता होती है (पृष्ठ 1, सार)।
- पशुधन प्रवासन: अंतर-क्षेत्रीय पशुधन आंदोलन बीमारी के प्रसार का एक प्रमुख चालक है (पृष्ठ 2), जिससे सीमा नियंत्रण और परिवहन पर्यवेक्षण महत्वपूर्ण लेकिन पूरी तरह से लागू करने में मुश्किल हो जाता है।
- टीकाकरण प्रभावकारिता: जबकि टीके मौजूद हैं, उनकी प्रभावकारिता 100% नहीं है (M5 टीके के लिए लगभग 65%, पृष्ठ 3), जिसका अर्थ है कि टीकाकरण अकेले बीमारी को पूरी तरह से समाप्त नहीं कर सकता है।
-
कम्प्यूटेशनल/गणितीय बाधाएँ:
- जटिल महामारी गतिशीलता: ब्रुसेलोसिस की संचरण गतिशीलता में विभिन्न पैच में संवेदनशील, संक्रमित और टीकाकरण की गई आबादी के बीच जटिल अंतःक्रियाएं शामिल हैं, जो सरल सांख्यिकीय मॉडल के लिए प्रभावी ढंग से पकड़ना चुनौतीपूर्ण है (पृष्ठ 2)।
- इष्टतम नियंत्रण समस्या जटिलता: इष्टतम नियंत्रण समाधान प्राप्त करने के लिए राज्य चर और संबंधित लागत चर के लिए अंतर समीकरणों की एक प्रणाली को हल करने की आवश्यकता होती है, जिसमें अक्सर गैर-रैखिक कार्य और पोंट्रीगिन के अधिकतम सिद्धांत का अनुप्रयोग शामिल होता है (धारा 4, पृष्ठ 11)। नियंत्रण चर $u_i(t)$ को $[0, 1]$ के भीतर सीमित किया गया है, जो हस्तक्षेप प्रयासों की व्यवहार्य सीमा का प्रतिनिधित्व करता है।
-
डेटा-संचालित बाधाएँ:
- भेड़ संक्रमण के लिए डेटा की कमी: एक महत्वपूर्ण बाधा "भेड़ झुंडों में ब्रुसेलोसिस संक्रमण पर प्रत्यक्ष डेटा की कमी" है (पृष्ठ 16)। यह लेखकों को 2022-2024 के बीच मानव ब्रुसेलोसिस सकारात्मकता दर का उपयोग करके एक रैखिक प्रतिगमन मॉडल (समीकरण 5.1) का उपयोग करके अप्रत्यक्ष रूप से भेड़ संक्रमण दर का अनुमान लगाने के लिए मजबूर करता है। इस अप्रत्यक्ष अनुमान, एक उच्च $R^2$ मान के बावजूद, एक संभावित "डेटा पूर्वाग्रह" (पृष्ठ 21) पेश करता है।
- मॉडल सरलीकरण: वर्तमान मॉडल प्रत्येक पैच के भीतर भेड़ों के समान मिश्रण मानता है और रोग प्रसार पर जनसंख्या संरचना (जैसे, आयु, प्रजनन प्रकार) के प्रभाव को अनदेखा करता है (पृष्ठ 21)।
- निर्धारक मॉडल सीमाएँ: मॉडल की निर्धारक प्रकृति यादृच्छिक घटनाओं को पूरी तरह से पकड़ नहीं सकती है, जैसे संक्रमित भेड़ों का स्टोकेस्टिक प्रवासन, जो संचरण को प्रभावित कर सकता है (पृष्ठ 21)।
-
संसाधन बाधाएँ:
- सीमित स्वास्थ्य संसाधन: ब्रुसेलोसिस की रोकथाम और नियंत्रण के लिए उपलब्ध "सीमित स्वास्थ्य संसाधन" (पृष्ठ 1, सार; पृष्ठ 3) सबसे बड़ी बाधा है। यह व्यापक, समान हस्तक्षेपों को लागू करने की क्षमता को सीधे प्रभावित करता है।
- सीमित टीकाकरण संसाधन: विशेष रूप से, टीकाकरण के लिए सीमित संसाधन पूरे क्षेत्रों में समान टीकाकरण कवरेज प्राप्त करना चुनौतीपूर्ण बनाते हैं (पृष्ठ 3)।
- असमान संसाधन वितरण: स्वास्थ्य संसाधन "अपेक्षाकृत असमान रूप से वितरित" (पृष्ठ 20) हैं, जो समान और प्रभावी नियंत्रण प्रयासों को और जटिल बनाते हैं।
यह दृष्टिकोण क्यों
विकल्प की अनिवार्यता
एक दो-पैच Susceptible-Infected-Vaccinated (SIV) भेड़ गतिकीय मॉडल को अपनाना, इष्टतम नियंत्रण सिद्धांत के साथ मिलकर, निंग्शिया में ब्रुसेलोसिस संचरण की अंतर्निहित जटिलताओं को देखते हुए, केवल एक विकल्प नहीं बल्कि एक अनिवार्य आवश्यकता थी। लेखकों ने स्पष्ट रूप से पारंपरिक "SOTA" विधियों की सीमाओं को पहचाना, विशेष रूप से सांख्यिकीय मॉडल, जो कई महामारी विज्ञान अध्ययनों में पिछले स्वर्ण मानक का गठन करते हैं। जैसा कि परिचय में कहा गया है, "मौजूदा शोध मुख्य रूप से महामारी भविष्यवाणी के लिए सांख्यिकीय मॉडल का उपयोग करने पर केंद्रित है, लेकिन इन मॉडलों में महामारी संचरण की जटिल गतिशीलता को संभालने में सीमाएं हैं और मानव गतिविधियों और प्राकृतिक वातावरण के साथ स्थानिक-कालिक अंतःक्रियाओं को प्रभावी ढंग से पकड़ना मुश्किल है।" इस अहसास ने विशुद्ध रूप से सांख्यिकीय दृष्टिकोण से एक प्रस्थान को अनिवार्य बना दिया।
सांख्यिकीय मॉडल, भविष्यवाणी के लिए उपयोगी होने के बावजूद, अक्सर समय और स्थान पर रोग प्रसार, जनसंख्या आंदोलन और हस्तक्षेप के प्रभावों की गतिशील परस्पर क्रिया को यांत्रिक रूप से प्रस्तुत करने के लिए संघर्ष करते हैं। निंग्शिया में ब्रुसेलोसिस महत्वपूर्ण स्थानिक-कालिक विषमता प्रदर्शित करता है, जिसका अर्थ है कि इसकी व्यापकता विभिन्न भौगोलिक क्षेत्रों में काफी भिन्न होती है और समय के साथ बदलती रहती है। इन जटिल गतिशीलता को चिह्नित करने और, महत्वपूर्ण रूप से, इष्टतम और विभेदित नियंत्रण रणनीतियों को तैयार करने के लिए, एक गतिशील मॉडलिंग ढांचा ही एकमात्र व्यवहार्य मार्ग था। SIV जैसे कम्पार्टमेंटल मॉडल जनसंख्या राज्यों (संवेदनशील, संक्रमित, टीकाकरण) और उनके बीच संक्रमणों के स्पष्ट प्रतिनिधित्व की अनुमति देते हैं, जो यांत्रिक समझ प्रदान करते हैं जिसे केवल सांख्यिकीय सहसंबंध नहीं दे सकते।
तुलनात्मक श्रेष्ठता
यह दो-पैच SIV गतिकीय मॉडल जटिल, परस्पर विरोधी महामारी विज्ञान प्रक्रियाओं को पकड़ने और अनुकूलित करने की अपनी संरचनात्मक क्षमता के माध्यम से पिछले दृष्टिकोणों पर गुणात्मक श्रेष्ठता प्रदान करता है। सरल सांख्यिकीय मॉडल के विपरीत, यह केवल परिणामों की भविष्यवाणी नहीं करता है; यह यह समझने के लिए एक ढांचा प्रदान करता है कि बीमारी क्यों और कैसे फैलती है और कौन से हस्तक्षेप सबसे प्रभावी हैं।
- स्थानिक-कालिक विषमता: "उच्च-जोखिम" और "निम्न-जोखिम" पैच में विभाजन, जैसा कि चित्र 1 में दर्शाया गया है, एक मौलिक संरचनात्मक लाभ है। यह मॉडल को विभिन्न भौगोलिक क्षेत्रों में भिन्न रोग गतिशीलता और हस्तक्षेप की जरूरतों को ध्यान में रखने की अनुमति देता है, जो निंग्शिया जैसे क्षेत्र के लिए महत्वपूर्ण है।
- गतिकीय अंतःक्रियाएँ और प्रवासन: मॉडल स्पष्ट रूप से भेड़ों के संवेदनशील, संक्रमित और टीकाकरण की गई आबादी के बीच प्रवासन दरों ($a_{12}, a_{21}, b_{12}, b_{21}, c_{12}, c_{21}$) को शामिल करता है। यह एकल-पैच मॉडल या सांख्यिकीय विधियों पर एक महत्वपूर्ण संरचनात्मक सुधार है जो रोग प्रसार पर अंतर-क्षेत्रीय आंदोलन के प्रभाव को अनदेखा कर सकते हैं। जैसा कि टिप्पणी 2 प्रकाश डालती है, प्रवासन को अनदेखा करने से "विभिन्न पैच के बुनियादी प्रजनन संख्या का अधिक अनुमान या कम अनुमान लगाया जा सकता है।"
- इष्टतम नियंत्रण ढांचा: इष्टतम नियंत्रण समाधान ($u_1$ से $u_6$) प्राप्त करने के लिए पोंट्रीगिन के अधिकतम सिद्धांत को एकीकृत करना एक महत्वपूर्ण गुणात्मक छलांग है। यह विभिन्न हस्तक्षेप रणनीतियों (व्यक्तिगत सुरक्षा, टीकाकरण, प्रवासन पर्यवेक्षण) के मात्रात्मक मूल्यांकन और समय के साथ उनके इष्टतम आवंटन की अनुमति देता है, सीमित संसाधन की बाधा के तहत। यह सरल प्रदर्शन मेट्रिक्स से परे जाकर कार्रवाई योग्य, समय-निर्भर रणनीतियाँ प्रदान करता है, न कि केवल प्रभावशीलता का एक स्थिर मूल्यांकन।
- यांत्रिक समझ: SIV संरचना रोग संचरण, वसूली और प्रतिरक्षा के लिए एक स्पष्ट, व्याख्यात्मक तंत्र प्रदान करती है, जो ब्लैक-बॉक्स भविष्य कहनेवाला मॉडल की तुलना में नीति निर्माण के लिए अधिक मजबूत है। यह बुनियादी प्रजनन संख्या ($R_0$) जैसे प्रमुख महामारी विज्ञान मापदंडों की गणना की अनुमति देता है, जो रोग की निरंतरता और स्थिरता में अंतर्दृष्टि प्रदान करता है।
पत्र उच्च-आयामी शोर प्रबंधन या स्मृति जटिलता पर चर्चा नहीं करता है, क्योंकि ये इस प्रकार के महामारी विज्ञान मॉडलिंग के लिए इसके प्रासंगिक विकल्पों (सांख्यिकीय मॉडल, सरल ODE मॉडल) के लिए प्राथमिक तुलनात्मक अक्ष नहीं हैं। इसकी श्रेष्ठता जटिल गतिशील प्रणालियों को स्थानिक अंतःक्रियाओं के साथ मॉडल करने और उस प्रणाली के भीतर हस्तक्षेपों को अनुकूलित करने की क्षमता में निहित है।
बाधाओं के साथ संरेखण
इष्टतम नियंत्रण सिद्धांत के साथ दो-पैच SIV गतिकीय मॉडल का चुना हुआ विकल्प समस्या की कठोर आवश्यकताओं के साथ पूरी तरह से संरेखित होता है, जो समस्या और उसके समाधान के बीच एक मजबूत "विवाह" बनाता है।
- स्थानिक विषमता: समस्या स्पष्ट रूप से निंग्शिया को "महत्वपूर्ण स्थानिक-कालिक विषमता" वाले उच्च-घटना वाले क्षेत्र के रूप में पहचानती है। दो-पैच संरचना (उच्च-जोखिम और निम्न-जोखिम) प्रत्येक क्षेत्र में अलग-अलग मापदंडों और गतिशीलता की अनुमति देकर, साथ ही उनके बीच अंतःक्रियाओं की अनुमति देकर इसे सीधे संबोधित करती है।
- सीमित स्वास्थ्य संसाधन: एक मुख्य बाधा "सीमित स्वास्थ्य संसाधनों के तहत" रोकथाम और नियंत्रण उद्देश्यों को प्राप्त करने की आवश्यकता है। इष्टतम नियंत्रण ढांचा स्वाभाविक रूप से इसके लिए डिज़ाइन किया गया है। एक उद्देश्य फ़ंक्शन (4.2) को परिभाषित करके जो संक्रमित आबादी और नियंत्रण प्रयासों से जुड़ी लागतों दोनों को कम करता है, मॉडल दुर्लभ संसाधनों के सबसे कुशल आवंटन के लिए एक रणनीति प्रदान करता है।
- विभेदित नियंत्रण रणनीतियाँ: "विभेदित नियंत्रण रणनीतियों" के लिए संकेत मॉडल की छह अलग-अलग नियंत्रण कार्यों ($u_1$ से $u_6$) को विभिन्न हस्तक्षेपों (व्यक्तिगत सुरक्षा, टीकाकरण, प्रवासन पर्यवेक्षण) के लिए दोनों पैच में परिभाषित करने की क्षमता से पूरा किया जाता है। इष्टतम नियंत्रण समाधान तब प्रत्येक पैच की विशिष्ट जोखिम प्रोफ़ाइल के अनुरूप रणनीतियों की ओर ले जाने वाले इन नियंत्रणों के आदर्श समय-परिवर्तनशील अनुप्रयोग को निर्धारित करता है।
- हस्तक्षेप के प्रभावों का मात्रात्मककरण: समस्या टीकाकरण और परिवहन पर्यवेक्षण के निवारक प्रभाव को मापने की आवश्यकता है। SIV मॉडल स्पष्ट रूप से टीकाकरण कम्पार्टमेंट ($V_i$) और नियंत्रण चर ($u_2, u_5$ टीकाकरण के लिए; $u_3, u_6$ प्रवासन पर्यवेक्षण के लिए) को शामिल करता है जो इन प्रक्रियाओं को सीधे संशोधित करते हैं, जिससे इष्टतम नियंत्रण ढांचे के भीतर उनके मात्रात्मक मूल्यांकन की अनुमति मिलती है।
विकल्पों का अस्वीकरण
पत्र स्पष्ट रूप से और अप्रत्यक्ष रूप से कई वैकल्पिक दृष्टिकोणों को उनकी मुख्य समस्या विशेषताओं को संबोधित करने में असमर्थता के आधार पर अस्वीकार करता है।
- सांख्यिकीय मॉडल: "महामारी भविष्यवाणी के लिए सांख्यिकीय मॉडल" का सबसे सीधा अस्वीकरण है। लेखक कहते हैं कि इन मॉडलों में "महामारी संचरण की जटिल गतिशीलता को संभालने में सीमाएं हैं और मानव गतिविधियों और प्राकृतिक वातावरण के साथ स्थानिक-कालिक अंतःक्रियाओं को प्रभावी ढंग से पकड़ना मुश्किल है।" यह गतिशील प्रसार और इष्टतम हस्तक्षेप की यांत्रिक समझ की आवश्यकता वाली समस्या के लिए उनकी अपर्याप्तता को उजागर करता है।
- एकल-पैच गतिकीय मॉडल: हालांकि स्पष्ट रूप से नामित नहीं किया गया है, "स्थानिक-कालिक विषमता" पर पत्र के जोर और "दो-पैच" मॉडल के निर्माण से स्वाभाविक रूप से एकल-पैच मॉडल अस्वीकार हो जाते हैं। टिप्पणी 2 आगे इस बात को मजबूत करती है कि एकल-पैच मॉडल में प्रवासन को अनदेखा करने से "विभिन्न पैच के बुनियादी प्रजनन संख्या का अधिक अनुमान या कम अनुमान लगाया जा सकता है," जिससे गलत मूल्यांकन और उप-इष्टतम रणनीतियाँ होती हैं। "अंतर-क्षेत्रीय सहयोगात्मक संयुक्त नियंत्रण रणनीतियों" की आवश्यकता भी एक बहु-पैच दृष्टिकोण की आवश्यकता को दर्शाती है।
- स्टोकेस्टिक घटनाओं के लिए निर्धारक मॉडल: "सीमाओं" अनुभाग (धारा 6) में, लेखक स्वीकार करते हैं कि उनका निर्धारक मॉडल "संक्रमित भेड़ों के यादृच्छिक प्रवासन जैसी यादृच्छिक घटनाओं" का वर्णन नहीं कर सकता है। यह उन परिदृश्यों के लिए विशुद्ध रूप से निर्धारक मॉडल के उपयोग को अस्वीकार करता है जहां स्टोकेस्टिसिटी एक महत्वपूर्ण भूमिका निभाती है, यह सुझाव देते हुए कि भविष्य के काम में स्टोकेस्टिक प्रक्रियाओं को शामिल किया जा सकता है जैसे कि ऑर्स्टीन-उहलेनबेक प्रक्रिया।
- सामान्य मशीन लर्निंग मॉडल (जैसे, GANs, Diffusion, Transformers): प्रॉम्प्ट इन्हें "SOTA" विधियों के रूप में उल्लेख करता है। हालांकि, इष्टतम नियंत्रण के लिए महामारी विज्ञान मॉडलिंग के संदर्भ में, ये सीधे लागू करने योग्य विकल्प नहीं हैं। वे विभिन्न कार्यों (जैसे, छवि निर्माण, प्राकृतिक भाषा प्रसंस्करण) के लिए डिज़ाइन किए गए हैं और रोग संचरण गतिशीलता को मॉडल करने और व्याख्यात्मक नियंत्रण नीतियों को प्राप्त करने के लिए आवश्यक यांत्रिक संरचना का अभाव है। पत्र इन विशिष्ट प्रकार के मॉडलों का उल्लेख या अस्वीकार नहीं करता है, क्योंकि वे पारंपरिक महामारी विज्ञान मॉडलिंग तुलनाओं के दायरे से बाहर हैं। प्रासंगिक विकल्प महामारी विज्ञान और गणितीय मॉडलिंग के क्षेत्र में हैं।
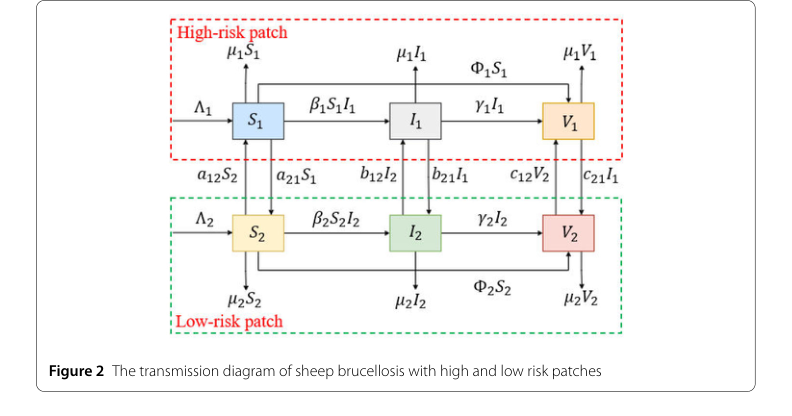 Figure 2. The transmission diagram of sheep brucellosis with high and low risk patches
Figure 2. The transmission diagram of sheep brucellosis with high and low risk patches
गणितीय और तार्किक तंत्र
मास्टर समीकरण
इस पत्र के गणितीय इंजन का पूर्ण मूल उद्देश्य फ़ंक्शन है, जो ब्रुसेलोसिस महामारी और इसके नियंत्रण प्रयासों से जुड़ी समग्र लागत को मापता है। लक्ष्य एक निर्दिष्ट समय क्षितिज $T$ पर इस फ़ंक्शन को कम करना है। इसे इस प्रकार व्यक्त किया गया है:
$$ J = \int_0^T \left[ A_1I_1(t) + A_2I_2(t) + \frac{1}{2} \sum_{i=1}^6 B_i u_i^2(t) \right] dt $$
यह समीकरण, नियंत्रण के तहत दो-पैच SIV (संवेदनशील-संक्रमित-टीकाकृत) मॉडल का वर्णन करने वाले सामान्य अंतर समीकरणों (ODEs) की प्रणाली के साथ मिलकर, पूर्ण इष्टतम नियंत्रण समस्या का गठन करता है। भेड़ आबादी की गतिशीलता का वर्णन करने वाले ODEs इस तंत्र का एक अंतर्निहित हिस्सा हैं क्योंकि वे यह निर्धारित करते हैं कि समय के साथ $I_1(t)$, $I_2(t)$, और $u_i(t)$ के प्रभाव कैसे विकसित होते हैं।
पद-दर-पद विच्छेदन
आइए मास्टर समीकरण और इसके घटकों का, नियंत्रण चर के साथ जो अंतर्निहित गतिकीय प्रणाली को प्रभावित करते हैं, विश्लेषण करें:
-
$J$:
- गणितीय परिभाषा: एक स्केलर मान जो कुल संचित लागत का प्रतिनिधित्व करता है।
- भौतिक/तार्किक भूमिका: यह वह मात्रा है जिसे लेखक कम करना चाहते हैं। यह हस्तक्षेप अवधि के दौरान संक्रमित आबादी (महामारी के बोझ) और नियंत्रण रणनीतियों पर खर्च किए गए संसाधनों का एक व्यापक माप के रूप में कार्य करता है।
- एकीकरण क्यों: प्रणाली की गतिशीलता समय के साथ निरंतर होती है, इसलिए एकीकरण का उपयोग प्रारंभिक समय $t=0$ से अंतिम समय $t=T$ तक तात्कालिक लागतों को लगातार जोड़ने के लिए किया जाता है। यह एक स्नैपशॉट के बजाय एक कुल, संचयी लागत प्रदान करता है।
-
$\int_0^T \dots dt$:
- गणितीय परिभाषा: समय अंतराल $[0, T]$ पर एक निश्चित समाकल।
- भौतिक/तार्किक भूमिका: यह ऑपरेटर पूरे हस्तक्षेप अवधि में समाकल्य (एक दिए गए क्षण में लागत फ़ंक्शन) के तात्कालिक मूल्य को जमा करता है।
- एकीकरण क्यों: चूंकि राज्य चर और नियंत्रण क्रियाएं समय के निरंतर कार्य मानी जाती हैं, इसलिए एकीकरण एक निरंतर अवधि में उनके प्रभावों को सारांशित करने के लिए प्राकृतिक गणितीय उपकरण है।
-
$A_1I_1(t)$:
- गणितीय परिभाषा: एक सकारात्मक भार गुणांक $A_1$ और समय $t$ पर पैच 1 में संक्रमित भेड़ों की संख्या $I_1$ का गुणनफल।
- भौतिक/तार्किक भूमिका: यह पद उच्च-जोखिम वाले पैच (पैच 1) में संक्रमित आबादी से जुड़ी तात्कालिक लागत या बोझ का प्रतिनिधित्व करता है। उच्च $A_1$ इस पैच में $I_1$ को कम करने के लिए अनुकूलन को चलाने वाले, इस पैच में संक्रमण के लिए अधिक महत्व या दंड का संकेत देता है।
- जोड़ क्यों: यह पद कुल लागत में जोड़ा जाता है क्योंकि यह एक अवांछनीय परिणाम (संक्रमण) का प्रतिनिधित्व करता है जो समग्र बोझ में योगदान देता है।
-
$A_2I_2(t)$:
- गणितीय परिभाषा: एक सकारात्मक भार गुणांक $A_2$ और समय $t$ पर पैच 2 में संक्रमित भेड़ों की संख्या $I_2$ का गुणनफल।
- भौतिक/तार्किक भूमिका: $A_1I_1(t)$ के समान, यह पद निम्न-जोखिम वाले पैच (पैच 2) में संक्रमित आबादी से जुड़ी तात्कालिक लागत का प्रतिनिधित्व करता है। $A_2$ $I_2$ को कम करने के महत्व को भारित करता है।
- जोड़ क्यों: यह कुल लागत का एक योगात्मक घटक है, जो बोझ के एक और स्रोत को दर्शाता है।
-
$A_1, A_2$:
- गणितीय परिभाषा: सकारात्मक स्थिरांक गुणांक।
- भौतिक/तार्किक भूमिका: ये "ट्यूनिंग पैरामीटर" हैं जो मॉडलर्स को प्रत्येक पैच में संक्रमित आबादी को कम करने के लिए सापेक्ष महत्व निर्दिष्ट करने की अनुमति देते हैं। उदाहरण के लिए, यदि $A_1 > A_2$, तो इसका तात्पर्य है कि पैच 1 में संक्रमण को कम करना पैच 2 में संक्रमण को कम करने की तुलना में अधिक महत्वपूर्ण या महंगा माना जाता है।
- गुणांक क्यों: वे नियंत्रण रणनीति के उद्देश्यों को संतुलित करने के लिए लचीलापन प्रदान करते हैं।
-
$I_1(t), I_2(t)$:
- गणितीय परिभाषा: क्रमशः पैच 1 और पैच 2 में संक्रमित भेड़ों की संख्या का प्रतिनिधित्व करने वाले राज्य चर, समय $t$ पर। ये गैर-नकारात्मक वास्तविक संख्याएँ हैं।
- भौतिक/तार्किक भूमिका: ये नियंत्रण रणनीति के प्राथमिक लक्ष्य हैं। $J$ को कम करना सीधे इन आबादी को कम करने का लक्ष्य रखता है। उनकी गतिशीलता ODEs (4.1) की प्रणाली द्वारा शासित होती है।
-
$\frac{1}{2} \sum_{i=1}^6 B_i u_i^2(t)$:
- गणितीय परिभाषा: सकारात्मक गुणांक $B_i$ द्वारा भारित छह नियंत्रण चर में से प्रत्येक के लिए द्विघात पदों का योग का आधा।
- भौतिक/तार्किक भूमिका: यह पद नियंत्रण रणनीतियों को लागू करने की तात्कालिक लागत का प्रतिनिधित्व करता है। द्विघात रूप ($u_i^2$) का मतलब है कि मजबूत नियंत्रण प्रयासों को लागू करने की लागत असमान रूप से अधिक होती है, जिससे अत्यधिक या अवास्तविक हस्तक्षेपों को हतोत्साहित किया जाता है। यह यह भी सुनिश्चित करता है कि लागत हमेशा गैर-नकारात्मक हो।
- योग क्यों: छह अलग-अलग नियंत्रण उपाय हैं, और उनकी व्यक्तिगत लागतों को कुल नियंत्रण लागत बनाने के लिए एकत्रित किया जाता है।
- द्विघात ($u_i^2$) क्यों: द्विघात रूप कई कारणों से इष्टतम नियंत्रण में एक मानक विकल्प है: यह सुनिश्चित करता है कि लागत हमेशा सकारात्मक हो, यह बड़े नियंत्रण प्रयासों को अधिक भारी दंडित करता है (अनुकूलन को घटते रिटर्न के लिए "अधिक मेहनत" करवाता है), और यह अक्सर उद्देश्य फ़ंक्शन की उत्तलता में योगदान देता है, जो एक अद्वितीय इष्टतम समाधान खोजने को सरल बनाता है।
-
$B_i$:
- गणितीय परिभाषा: प्रत्येक नियंत्रण चर $u_i$ के लिए सकारात्मक स्थिरांक गुणांक।
- भौतिक/तार्किक भूमिका: ये गुणांक प्रत्येक विशिष्ट नियंत्रण उपाय को लागू करने की सापेक्ष लागत निर्धारित करते हैं। उच्च $B_i$ का मतलब है कि नियंत्रण $u_i$ लागू करने के लिए अधिक महंगा या संसाधन-गहन है।
- गुणांक क्यों: वे संक्रमण को कम करने और विशिष्ट हस्तक्षेपों की लागत के बीच संतुलन को ठीक करने की अनुमति देते हैं।
-
$u_i(t)$ ($u_1, \dots, u_6$):
- गणितीय परिभाषा: समय-निर्भर नियंत्रण कार्य, $[0, 1]$ के भीतर होने के लिए बाधित।
- भौतिक/तार्किक भूमिका: ये निर्णय चर हैं जिन्हें अनुकूलन प्रक्रिया निर्धारित करने का प्रयास करती है। वे विभिन्न नियंत्रण उपायों की तीव्रता या प्रभावशीलता का प्रतिनिधित्व करते हैं:
- $u_1(t)$: पैच 1 में व्यक्तिगत सुरक्षा व्यवहार का नियंत्रण प्रभाव। ODEs में, यह प्रभावी संचरण दर $(1-u_1)\beta_1S_1I_1$ को कम करता है।
- $u_2(t)$: पैच 1 में टीकाकरण का नियंत्रण प्रभाव। ODEs में, यह संवेदनशील भेड़ों $S_1$ को $u_2S_1$ की दर से टीकाकरण वर्ग $V_1$ में ले जाता है।
- $u_3(t)$: पैच 1 से पैच 2 तक प्रवासन पर नियंत्रण प्रभाव। ODEs में, यह पैच 1 से पैच 2 तक $S_1, I_1, V_1$ के बहिर्वाह को कम करता है।
- $u_4(t)$: पैच 2 में व्यक्तिगत सुरक्षा व्यवहार का नियंत्रण प्रभाव। $u_1$ के समान, यह प्रभावी संचरण दर $(1-u_4)\beta_2S_2I_2$ को कम करता है।
- $u_5(t)$: पैच 2 में टीकाकरण का नियंत्रण प्रभाव। $u_2$ के समान, यह संवेदनशील भेड़ों $S_2$ को $u_5S_2$ की दर से $V_2$ में ले जाता है।
- $u_6(t)$: पैच 2 से पैच 1 तक प्रवासन पर नियंत्रण प्रभाव। $u_3$ के समान, यह पैच 2 से पैच 1 तक $S_2, I_2, V_2$ के बहिर्वाह को कम करता है।
चरण-दर-चरण प्रवाह
कल्पना करें कि प्रणाली एक जटिल, परस्पर जुड़ी हुई असेंबली लाइन की तरह है जहां भेड़ों की आबादी कम्पार्टमेंट और पैच के बीच चलती है, जो नियंत्रण लीवर से प्रभावित होती है।
-
प्रारंभिक स्थिति सेटअप: प्रक्रिया उच्च-जोखिम (पैच 1) और निम्न-जोखिम (पैच 2) दोनों क्षेत्रों में संवेदनशील ($S_1(0), S_2(0)$), संक्रमित ($I_1(0), I_2(0)$), और टीकाकरण की गई ($V_1(0), V_2(0)$) भेड़ों की एक परिभाषित प्रारंभिक संख्या के साथ शुरू होती है। ये प्रारंभिक स्थितियां महामारी के प्रक्षेपवक्र के लिए शुरुआती बिंदु निर्धारित करती हैं।
-
नियंत्रण लीवर समायोजन: किसी भी क्षण $t$ पर, छह नियंत्रण लीवर ($u_1(t)$ से $u_6(t)$) विशिष्ट मानों पर सेट किए जाते हैं, जो हस्तक्षेप की तीव्रता का प्रतिनिधित्व करते हैं। उदाहरण के लिए, यदि $u_2(t)$ अधिक है, तो इसका मतलब है कि पैच 1 में एक मजबूत टीकाकरण अभियान सक्रिय है। यदि $u_3(t)$ अधिक है, तो इसका तात्पर्य है कि पैच 1 से पैच 2 तक भेड़ों के आंदोलन को प्रतिबंधित करने के लिए सख्त उपाय किए गए हैं।
-
जनसंख्या गतिशीलता सिमुलेशन: ये नियंत्रण सेटिंग्स सीधे दोनों पैच में प्रत्येक भेड़ आबादी के परिवर्तन की दरों को प्रभावित करती हैं, जैसा कि छह युग्मित ODEs (4.1) की प्रणाली द्वारा वर्णित है।
- संक्रमण में कमी: नियंत्रण $u_1$ और $u_4$ "ढाल" की तरह कार्य करते हैं, जो उनके संबंधित पैच में संवेदनशील भेड़ों के संक्रमित होने की दर को कम करते हैं।
- टीकाकरण ड्राइव: नियंत्रण $u_2$ और $u_5$ "कन्वेयर" के रूप में कार्य करते हैं, जो संवेदनशील भेड़ों को टीकाकरण वर्ग में ले जाते हैं, उन्हें प्रतिरक्षा बनाते हैं।
- प्रवासन प्रबंधन: नियंत्रण $u_3$ और $u_6$ "गेटकीपर" के रूप में कार्य करते हैं, जो दो पैच के बीच संवेदनशील, संक्रमित और टीकाकरण की गई भेड़ों के प्रवाह को नियंत्रित करते हैं। उदाहरण के लिए, $u_3$ पैच 1 से पैच 2 में जाने वाली भेड़ों को कम करता है, जबकि $u_6$ पैच 2 से पैच 1 में जाने वाली भेड़ों को कम करता है।
- प्राकृतिक प्रक्रियाएं: नियंत्रणों के अलावा, प्राकृतिक जन्म दर ($A_1, A_2$), प्राकृतिक मृत्यु दर ($\mu_1, \mu_2$), और वसूली दर ($\gamma_1, \gamma_2$) लगातार जनसंख्या आकारों को प्रभावित करती हैं।
-
तात्कालिक लागत गणना: जैसे-जैसे आबादी विकसित होती है, प्रत्येक क्षण $t$ पर, दो प्रकार की लागतों की गणना की जाती है:
- महामारी बोझ: प्रत्येक पैच में संक्रमित भेड़ों की वर्तमान संख्या ($I_1(t)$ और $I_2(t)$) लागत में योगदान करती है, जिसे $A_1$ और $A_2$ द्वारा भारित किया जाता है। यह बीमारी के चल रहे प्रभाव को मापने वाले "मीटर" की तरह है।
- हस्तक्षेप व्यय: नियंत्रण लीवर ($u_i(t)$) की वर्तमान सेटिंग्स भी $B_i$ और वर्ग द्वारा भारित लागत लगाती हैं। यह "ईंधन गेज" की तरह है जो दिखा रहा है कि हस्तक्षेपों द्वारा कितना संसाधन खर्च किया जा रहा है।
-
कुल लागत संचय: इन तात्कालिक लागतों को पूरे हस्तक्षेप अवधि ( $t=0$ से $t=T$ तक) में समाकल ऑपरेटर द्वारा लगातार जोड़ा जाता है, जिसके परिणामस्वरूप एकल कुल लागत मान $J$ होता है।
-
अनुकूलन लूप (वैचारिक): पूरी "असेंबली लाइन" को नियंत्रण लीवर ($u_i(t)$ फ़ंक्शन) के विभिन्न सेटिंग्स के साथ बार-बार चलाया जाता है। लक्ष्य नियंत्रण कार्यों के विशिष्ट सेट को खोजना है जो अंतिम संचित लागत $J$ को यथासंभव छोटा बनाता है। इष्टतम नियंत्रण रणनीति की इस खोज को अनुकूलन गतिशीलता का सार है।
अनुकूलन गतिशीलता
तंत्र पोंट्रीगिन के अधिकतम सिद्धांत के अनुप्रयोग के माध्यम से सीखता है, अपडेट करता है और अभिसरण करता है, जो इष्टतम नियंत्रण सिद्धांत में एक मौलिक उपकरण है। यह सिद्धांत उद्देश्य फ़ंक्शन $J$ को कम करने की मूल समस्या को प्रणाली की गतिशीलता के अधीन एक हैमिल्टनियन फ़ंक्शन को शामिल करने वाली एक अधिक सुलभ समस्या में बदल देता है।
-
हैमिल्टनियन सूत्रीकरण: पहला कदम हैमिल्टनियन फ़ंक्शन, $H$, का निर्माण करना है, जैसा कि समीकरण (4.10) में परिभाषित किया गया है। यह फ़ंक्शन उद्देश्य फ़ंक्शन के इंटीग्रैंड (तात्कालिक लागत) को राज्य समीकरणों (जनसंख्या गतिशीलता) के दाहिने हाथ के पक्षों के साथ जोड़ता है, प्रत्येक को एक संबंधित "लागत चर" ($\lambda_{ij}$) द्वारा भारित किया जाता है। लागत चर अनिवार्य रूप से समग्र उद्देश्य फ़ंक्शन में प्रत्येक राज्य चर के छाया मूल्य या सीमांत योगदान का प्रतिनिधित्व करते हैं।
-
लागत चर समीकरण (एडजॉइंट सिस्टम): इष्टतम पथ खोजने के लिए, हमें यह समझने की आवश्यकता है कि लागत चर कैसे विकसित होते हैं। यह लागत चर के लिए अंतर समीकरणों की एक प्रणाली प्राप्त करके किया जाता है (समीकरण (4.11))। ये समीकरण हैमिल्टनियन के प्रत्येक राज्य चर के संबंध में आंशिक व्युत्पन्न लेकर प्राप्त किए जाते हैं। महत्वपूर्ण रूप से, राज्य समीकरणों के विपरीत जो समय में आगे बढ़ते हैं, लागत चर समीकरणों को आम तौर पर समय में पीछे हल किया जाता है, एक टर्मिनल स्थिति से शुरू होकर (यहां, $\lambda_{ij}(T) = 0$, जिसका अर्थ है कि नियंत्रण अवधि के अंत में राज्य की कोई भविष्य की लागत नहीं है)।
-
नियंत्रणों के लिए इष्टतमता की शर्तें: इष्टतम नियंत्रण खोजने का मूल प्रत्येक समय बिंदु पर नियंत्रण चर के संबंध में हैमिल्टनियन को कम करना है। यह प्रत्येक नियंत्रण चर के संबंध में हैमिल्टनियन के आंशिक व्युत्पन्न को शून्य पर सेट करके प्राप्त किया जाता है ($\frac{\partial H}{\partial u_i} = 0$)। यह इष्टतम नियंत्रण $u_i^*$ (समीकरण (4.12)) के लिए स्पष्ट व्यंजक उत्पन्न करता है, जो राज्य चर ($S_i, I_i, V_i$) और लागत चर ($\lambda_{ij}$) दोनों के कार्य हैं। इन व्यंजकों को तब आम तौर पर व्यवहार्य नियंत्रण सेट, जो प्रत्येक $u_i$ के लिए $[0, 1]$ है, पर "क्लिप" या प्रोजेक्ट किया जाता है।
-
पुनरावृत्तीय समाधान (फॉरवर्ड-बैकवर्ड स्वीप): राज्य समीकरण (समय में आगे) और लागत चर समीकरण (समय में पीछे) हैमिल्टनियन और नियंत्रणों के लिए इष्टतमता की शर्तों के माध्यम से युग्मित होते हैं। यह एक दो-बिंदु सीमा मूल्य समस्या बनाता है जिसे सीधे हल नहीं किया जा सकता है। इसके बजाय, एक पुनरावृत्तीय संख्यात्मक विधि, जिसे अक्सर फॉरवर्ड-बैकवर्ड स्वीप कहा जाता है, नियोजित की जाती है:
- प्रारंभिक अनुमान: नियंत्रण कार्यों $u_i(t)$ के लिए एक प्रारंभिक अनुमान पूरे समय क्षितिज $[0, T]$ पर बनाया जाता है (जैसे, सभी शून्य या यादृच्छिक मान)।
- फॉरवर्ड स्वीप: नियंत्रणों के वर्तमान अनुमान का उपयोग करके, राज्य समीकरणों (4.1) को उनकी प्रारंभिक स्थितियों के साथ $t=0$ से $t=T$ तक समय में आगे एकीकृत किया जाता है। यह सभी जनसंख्या आकारों ($S_i(t), I_i(t), V_i(t)$) के लिए एक प्रक्षेपवक्र उत्पन्न करता है।
- बैकवर्ड स्वीप: फॉरवर्ड स्वीप से प्राप्त राज्य प्रक्षेपवक्र का उपयोग करके, लागत चर समीकरणों (4.11) को उनकी टर्मिनल स्थितियों के साथ $t=T$ से $t=0$ तक समय में पीछे एकीकृत किया जाता है। यह सभी लागत चर ($\lambda_{ij}(t)$) के लिए एक प्रक्षेपवक्र उत्पन्न करता है।
- नियंत्रण अद्यतन: अद्यतन राज्य और लागत चर प्रक्षेपवक्र के साथ, इष्टतमता की शर्तों (4.12) का उपयोग नियंत्रण कार्यों $u_i(t)$ के एक नए, बेहतर सेट की गणना के लिए किया जाता है।
- अभिसरण जांच: चरणों 2-4 को दोहराया जाता है। प्रक्रिया तब तक जारी रहती है जब तक कि नियंत्रण कार्य, राज्य चर और लागत चर अभिसरण नहीं हो जाते, जिसका अर्थ है कि क्रमिक पुनरावृत्तियों के बीच परिवर्तन एक पूर्वनिर्धारित सहनशीलता से नीचे आता है। यह पुनरावृत्तीय शोधन तंत्र को इष्टतम नियंत्रण रणनीति "सीखने" की अनुमति देता है।
-
हानि परिदृश्य और ग्रेडिएंट: उद्देश्य फ़ंक्शन $J$ एक बहु-आयामी "हानि परिदृश्य" को परिभाषित करता है। अनुकूलन प्रक्रिया अनिवार्य रूप से इस परिदृश्य को नेविगेट करती है। लागत चर को इस परिदृश्य में सबसे तेज चढ़ाई (या न्यूनतम के लिए वंश) की दिशा का संकेत देने वाले सामान्यीकृत ग्रेडिएंट के रूप में सोचा जा सकता है। नियंत्रणों के लिए उद्देश्य फ़ंक्शन में द्विघात पद ($B_i u_i^2$) इस परिदृश्य को उत्तल बनाने में योगदान करते हैं, जो एक वांछनीय गुण है क्योंकि यह आम तौर पर गारंटी देता है कि पुनरावृत्तीय प्रक्रिया एक अद्वितीय वैश्विक न्यूनतम पर अभिसरण करेगी, न कि स्थानीय न्यूनतम में फंस जाएगी। पुनरावृत्तीय अद्यतन नियंत्रणों को इस तरह से समायोजित करते हैं जो कुल लागत को कम करता है, प्रभावी ढंग से हानि परिदृश्य को नीचे की ओर ले जाता है जब तक कि एक न्यूनतम तक नहीं पहुंच जाता, जो संक्रमण को कम करने और हस्तक्षेप लागतों के बीच इष्टतम संतुलन का प्रतिनिधित्व करता है। यह पुनरावृत्तीय प्रक्रिया मॉडल को समय के साथ सबसे प्रभावी और कुशल नियंत्रण रणनीति खोजने की अनुमति देती है। उद्देश्य फ़ंक्शन में लागतों और लाभों का सावधानीपूर्वक संतुलन इस परिदृश्य को आकार देता है, जो अभिसरण को एक व्यावहारिक समाधान की ओर निर्देशित करता है।
परिणाम, सीमाएँ और निष्कर्ष
प्रयोगात्मक डिजाइन और बेसलाइन
अपने गणितीय दावों को कठोरता से परीक्षण करने के लिए, लेखकों ने एक व्यापक प्रयोगात्मक सत्यापन प्रक्रिया शुरू की। उनके दृष्टिकोण का मूल 2010 से 2019 तक फैले निंग्शिया, चीन के वास्तविक दुनिया निगरानी डेटा का उपयोग करके उनके दो-पैच SIV भेड़ ब्रुसेलोसिस मॉडल (मॉडल 2.1) को कैलिब्रेट करना था। एक महत्वपूर्ण चुनौती संक्रमित भेड़ आबादी पर प्रत्यक्ष ऐतिहासिक डेटा की अनुपस्थिति थी। इससे पार पाने के लिए, उन्होंने 2022 और 2024 के बीच निंग्शिया में देखे गए मानव ब्रुसेलोसिस सकारात्मकता दर (प्रति 100,000 जनसंख्या) से भेड़ ब्रुसेलोसिस सकारात्मकता दर ($x$) का अनुमान लगाने के लिए एक रैखिक प्रतिगमन विश्लेषण का चतुराई से उपयोग किया। इसने एक मजबूत रैखिक प्रतिगमन समीकरण उत्पन्न किया: $y = 0.0044x + 2.5822 + \epsilon$, जहां $\epsilon \sim N(0,0.1544)$, एक प्रभावशाली निर्धारण गुणांक $R^2 = 0.9962$ (चित्र 4a में दर्शाया गया) का दावा करता है। इस संबंध ने उन्हें 2010 से 2019 तक उच्च-जोखिम और निम्न-जोखिम दोनों पैच में ऐतिहासिक रूप से नए संक्रमित भेड़ों के मामलों का अनुमान लगाने की अनुमति दी।
इस अनुमानित डेटा के साथ, मॉडल (2.1) को फिर न्यूनतम वर्ग विधि का उपयोग करके कैलिब्रेट किया गया था। मॉडल के लिए प्रारंभिक स्थितियां उच्च-जोखिम वाले पैच के लिए $S_1(0) = 1,898,000$, $I_1(0) = 42,724$, $V_1(0) = 0$, और निम्न-जोखिम वाले पैच के लिए $S_2(0) = 2,353,000$, $I_2(0) = 9091$, $V_2(0) = 0$ पर सेट की गई थीं। विभिन्न पैरामीटर, जिनमें जन्म दर, संचरण गुणांक, टीकाकरण दर, प्राकृतिक मृत्यु दर, वसूली दर और पैच के बीच प्रवासन दर शामिल हैं, या तो डेटा से फिट किए गए थे, गणना की गई थी, या मौजूदा साहित्य से प्राप्त किए गए थे, जैसा कि तालिका 1 में विस्तृत है।
प्रस्तावित इष्टतम नियंत्रण रणनीतियों की तुलना में जिन "पीड़ितों" या बेसलाइन मॉडल का उपयोग किया गया था, वे अनिवार्य रूप से वे परिदृश्य थे जहां कोई नियंत्रण हस्तक्षेप लागू नहीं किया गया था। इस "बिना नियंत्रण" स्थिति ने उनके मुख्य तंत्र - पोंट्रीगिन के अधिकतम सिद्धांत से प्राप्त विभेदित इष्टतम नियंत्रण रणनीतियों - की प्रभावकारिता को निश्चित रूप से प्रदर्शित करने के लिए बेंचमार्क के रूप में काम किया। विभिन्न नियंत्रण संयोजनों के तहत संक्रमित भेड़ मामलों में संचयी परिवर्तन की तुलना इस बेसलाइन के खिलाफ करके, उन्होंने यह निर्विवाद प्रमाण मांगा कि उनके प्रस्तावित हस्तक्षेपों से बीमारी की व्यापकता में काफी कमी आ सकती है।
साक्ष्य क्या साबित करता है
पत्र में प्रस्तुत साक्ष्य प्रस्तावित विभेदित इष्टतम नियंत्रण रणनीतियों की प्रभावकारिता का दृढ़ता से समर्थन करते हैं। सबसे पहले, मॉडल कैलिब्रेशन अत्यधिक सफल साबित हुआ; उच्च-जोखिम और निम्न-जोखिम दोनों पैच में नए संक्रमित भेड़ मामलों के लिए फिट किए गए परिणाम (चित्र 4b और 4c) अनुमानित ऐतिहासिक डेटा के साथ उत्कृष्ट स्थिरता दिखाते हैं। यह स्थिरता मॉडल की भविष्य कहनेवाला क्षमताओं और बाद के इष्टतम नियंत्रण विश्लेषण के लिए एक ठोस आधार प्रदान करती है।
संख्यात्मक सिमुलेशन, विशेष रूप से चित्र 5 में दर्शाए गए, समय के साथ इष्टतम नियंत्रण समाधानों के अस्तित्व और गतिशील व्यवहार को स्पष्ट रूप से प्रदर्शित करते हैं। उनके दृष्टिकोण का मुख्य तंत्र, जो दो-पैच SIV मॉडल पर इष्टतम नियंत्रण सिद्धांत का अनुप्रयोग है, विशिष्ट हस्तक्षेप प्रोफाइल की पहचान करके वास्तविकता में काम करता हुआ दिखाया गया है:
- उच्च-जोखिम वाले पैच में टीकाकरण ($u_2$): यह नियंत्रण चर हस्तक्षेप अवधि के दौरान लगातार अपना अधिकतम मूल्य बनाए रखता है, जो उच्च-जोखिम वाले क्षेत्रों में ब्रुसेलोसिस नियंत्रण में इसकी महत्वपूर्ण भूमिका को रेखांकित करता है।
- निम्न-जोखिम वाले पैच में टीकाकरण ($u_5$): यह हस्तक्षेप शुरू में महत्वपूर्ण प्रभाव दिखाता है लेकिन बाद के चरणों में शून्य तक गिर जाता है, यह सुझाव देता है कि लंबे समय तक निम्न-जोखिम वाले क्षेत्रों में निरंतर उच्च टीकाकरण दर आवश्यक नहीं हो सकती है।
- निम्न-जोखिम से उच्च-जोखिम पैच में परिवहन को प्रतिबंधित करना ($u_6$): यह नियंत्रण शुरू में अपेक्षाकृत उच्च स्तर पर बना रहा लेकिन बाद में घट गया, जो उच्च-जोखिम वाले क्षेत्रों में बीमारी के पुन: परिचय को रोकने में इसके महत्व को दर्शाता है।
- उच्च-जोखिम वाले पैच में स्वास्थ्य शिक्षा ($u_1$) और उच्च-जोखिम से निम्न-जोखिम पैच में परिवहन ($u_3$): ये नियंत्रण बाद के चरणों में बढ़े, यह दर्शाता है कि दीर्घकालिक में स्वास्थ्य शिक्षा को बढ़ाना और उच्च-जोखिम वाले क्षेत्रों से निम्न-जोखिम वाले क्षेत्रों में भेड़ों के परिवहन में मध्यम वृद्धि फायदेमंद हो सकती है।
- निम्न-जोखिम वाले पैच में स्वास्थ्य शिक्षा ($u_4$): यह नियंत्रण कम स्तर पर बना रहा, जो इन क्षेत्रों में रोग नियंत्रण पर कम महत्वपूर्ण प्रभाव का सुझाव देता है।
इसके अलावा, स्थानीय नियंत्रण रणनीतियों के विश्लेषण (चित्र 7) से पता चला कि जबकि $u_2$ (उच्च-जोखिम में टीकाकरण) और $u_3$ (उच्च-जोखिम से निम्न-जोखिम में परिवहन) जैसे व्यक्तिगत हस्तक्षेप उच्च-जोखिम वाले पैच में संक्रमण को काफी कम कर सकते हैं, और $u_5$ (निम्न-जोखिम में टीकाकरण) और $u_6$ (निम्न-जोखिम से उच्च-जोखिम में परिवहन को प्रतिबंधित करना) निम्न-जोखिम वाले पैच में प्रभावी थे, स्थानीय रणनीतियाँ अकेले निंग्शिया में ब्रुसेलोसिस के समग्र नियंत्रण उद्देश्य को प्राप्त करने के लिए पर्याप्त नहीं हो सकती हैं।
उनके मुख्य तंत्र की प्रभावकारिता के लिए निश्चित प्रमाण (चित्र 8) क्रॉस-पैच संयुक्त नियंत्रण रणनीतियों के मूल्यांकन से आया। रणनीति $S_{12}$ ( $u_2$, $u_3$, और $u_5$ को मिलाकर) उच्च-जोखिम वाले पैच के लिए सबसे प्रभावी साबित हुई, जिससे संक्रमित भेड़ों में सबसे बड़ी संचयी कमी आई। निम्न-जोखिम वाले पैच के लिए, रणनीति $S_{10}$ ( $u_2$, $u_5$, और $u_6$ को मिलाकर) ने सबसे बड़ा सकारात्मक संचयी परिवर्तन उत्पन्न किया, जो निम्न-जोखिम वाले पैच में संक्रमण को कम करने में इसके बेहतर प्रदर्शन को दर्शाता है। यह निर्विवाद रूप से साबित करता है कि ब्रुसेलोसिस नियंत्रण के प्रभावी होने के लिए प्रत्येक पैच के विशिष्ट जोखिम स्तर के अनुरूप एक विभेदित, संयुक्त दृष्टिकोण महत्वपूर्ण है।
सीमाएँ और भविष्य की दिशाएँ
जबकि यह अध्ययन मूल्यवान अंतर्दृष्टि और ब्रुसेलोसिस नियंत्रण के लिए एक मजबूत ढांचा प्रदान करता है, इसकी अंतर्निहित सीमाओं को स्वीकार करना महत्वपूर्ण है, जो स्वाभाविक रूप से भविष्य के शोध के लिए रास्ते खोलते हैं।
सबसे पहले, एक महत्वपूर्ण सीमा भेड़ ब्रुसेलोसिस संक्रमण दरों के अप्रत्यक्ष अनुमान से उत्पन्न होती है। निंग्शिया में संक्रमित भेड़ झुंडों पर प्रत्यक्ष ऐतिहासिक डेटा की कमी के कारण, लेखकों को एक रैखिक प्रतिगमन मॉडल का उपयोग करके मानव ब्रुसेलोसिस घटना डेटा से इन दरों का अनुमान लगाना पड़ा। यद्यपि प्रतिगमन ने एक उच्च $R^2$ मान दिखाया, यह अप्रत्यक्ष अनुमान विधि संभावित रूप से डेटा पूर्वाग्रह पेश कर सकती है [47]। प्रॉक्सी डेटा पर यह निर्भरता मॉडल के कैलिब्रेशन की सटीकता और, परिणामस्वरूप, व्युत्पन्न इष्टतम नियंत्रण रणनीतियों को प्रभावित कर सकती है।
दूसरे, वर्तमान मॉडल प्रत्येक पैच के भीतर भेड़ों की आबादी के समान मिश्रण मानता है, जनसंख्या संरचना के जटिल प्रभाव को नजरअंदाज करता है। आयु, विभिन्न प्रजनन प्रकारों और पैच-क्रॉस इंटरैक्शन जैसे कारक जो साधारण प्रवासन दरों से परे जाते हैं, स्पष्ट रूप से हिसाब में नहीं लिए जाते हैं [48]। वास्तव में, ये संरचनात्मक तत्व रोग संचरण गतिशीलता को महत्वपूर्ण रूप से बदल सकते हैं, जिसका अर्थ है कि मॉडल विविध पशुधन आबादी में ब्रुसेलोसिस के प्रसार की जटिलता को पूरी तरह से पकड़ नहीं सकता है।
तीसरे, एक निर्धारक मॉडल का उपयोग स्वाभाविक रूप से यादृच्छिक घटनाओं का वर्णन करने की इसकी क्षमता को सीमित करता है। संक्रमित भेड़ों के यादृच्छिक प्रवासन जैसी घटनाएं, जिनका रोग संचरण पर काफी प्रभाव पड़ सकता है, वर्तमान ढांचे द्वारा कब्जा नहीं किया जा सकता है [49]। वास्तविक दुनिया की महामारियां अक्सर अप्रत्याशित घटनाओं से प्रभावित होती हैं, और एक निर्धारक दृष्टिकोण इन महत्वपूर्ण पहलुओं को अत्यधिक सरल बना सकता है।
आगे देखते हुए, ये सीमाएं स्वाभाविक रूप से इन निष्कर्षों के आगे विकास और विकास के लिए कई आशाजनक दिशाओं का सुझाव देती हैं:
- जनसंख्या संरचना को शामिल करना: भविष्य के शोध में भेड़ ब्रुसेलोसिस मॉडल में अधिक विस्तृत जनसंख्या संरचनाओं को एकीकृत करने का लक्ष्य रखना चाहिए। इसमें आयु-संरचित मॉडल विकसित करना या विभिन्न प्रजनन प्रकारों (जैसे, डेयरी भेड़ बनाम मांस भेड़) के बीच अंतर करना शामिल हो सकता है ताकि समग्र महामारी में उनके विशिष्ट योगदान को बेहतर ढंग से समझा जा सके और हस्तक्षेपों को अधिक सटीक रूप से तैयार किया जा सके।
- स्टोकेस्टिसिटी का मॉडलिंग: वर्तमान मॉडल की निर्धारक प्रकृति को संबोधित करने के लिए, भविष्य के काम में स्टोकेस्टिक प्रक्रियाओं को शामिल किया जा सकता है। विशेष रूप से, पर्यावरणीय स्टोकेस्टिसिटी या यादृच्छिक प्रवासन घटनाओं को दर्शाने के लिए ऑर्स्टीन-उहलेनबेक प्रक्रिया का उपयोग करना अत्यधिक मूल्यवान होगा। यह संचरण गतिशीलता और नियंत्रण रणनीतियों की मजबूती को यादृच्छिकता कैसे प्रभावित करती है, इसका अधिक यथार्थवादी मूल्यांकन करने की अनुमति देगा, जिससे संभावित रूप से अधिक लचीले हस्तक्षेप योजनाएं बनेंगी।
- प्रत्यक्ष डेटा संग्रह और सत्यापन: एक दीर्घकालिक लक्ष्य भेड़ झुंडों में ब्रुसेलोसिस संक्रमण पर प्रत्यक्ष, व्यापक निगरानी डेटा की सुविधा और उपयोग करना होना चाहिए। यह अप्रत्यक्ष अनुमान की आवश्यकता को समाप्त कर देगा, मॉडल कैलिब्रेशन और सत्यापन की सटीकता में काफी सुधार करेगा। सार्वजनिक स्वास्थ्य एजेंसियों, पशु चिकित्सा सेवाओं और शोधकर्ताओं के बीच सहयोगात्मक प्रयास ऐसे डेटा संग्रह प्रणालियों की स्थापना में सहायक हो सकते हैं।
- आर्थिक लागत-लाभ विश्लेषण: जबकि वर्तमान अध्ययन संक्रमित आबादी को कम करने के लिए इष्टतम नियंत्रण पर केंद्रित है, भविष्य के शोध में विभिन्न नियंत्रण रणनीतियों के विस्तृत आर्थिक लागत-लाभ विश्लेषण को शामिल करने के लिए विस्तार किया जा सकता है। यह नीति निर्माताओं को सीमित स्वास्थ्य संसाधनों को देखते हुए, रोग में कमी को संसाधन आवंटन दक्षता के साथ संतुलित करते हुए एक अधिक समग्र दृष्टिकोण प्रदान करेगा।
इन बिंदुओं को संबोधित करके, निष्कर्षों को और परिष्कृत किया जा सकता है, जिससे निंग्शिया और उससे आगे के क्षेत्रों में ब्रुसेलोसिस नियंत्रण के लिए और भी सटीक, मजबूत और व्यावहारिक रूप से लागू रणनीतियाँ बनेंगी।
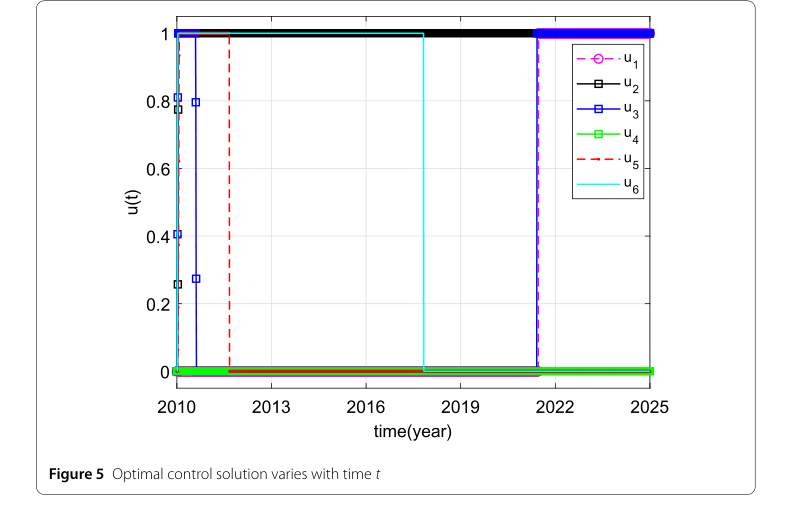 Figure 5. Optimal control solution varies with time t
Figure 5. Optimal control solution varies with time t
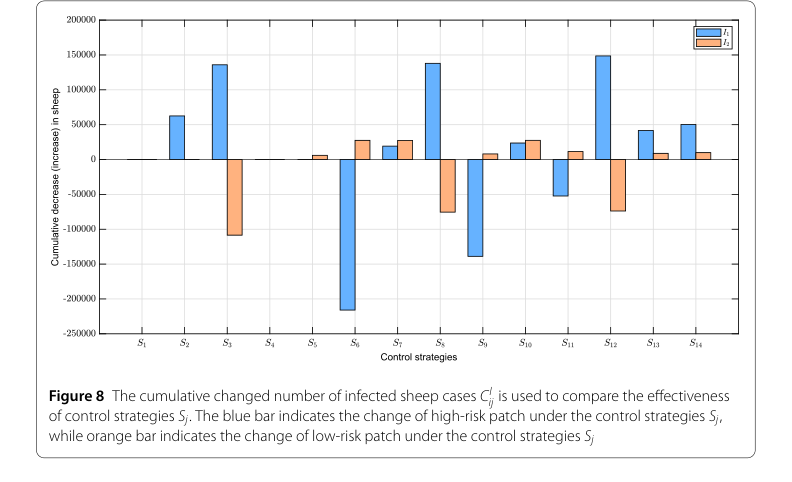 Figure 8. The cumulative changed number of infected sheep cases CI ij is used to compare the effectiveness of control strategies Sj. The blue bar indicates the change of high-risk patch under the control strategies Sj, while orange bar indicates the change of low-risk patch under the control strategies Sj
Figure 8. The cumulative changed number of infected sheep cases CI ij is used to compare the effectiveness of control strategies Sj. The blue bar indicates the change of high-risk patch under the control strategies Sj, while orange bar indicates the change of low-risk patch under the control strategies Sj
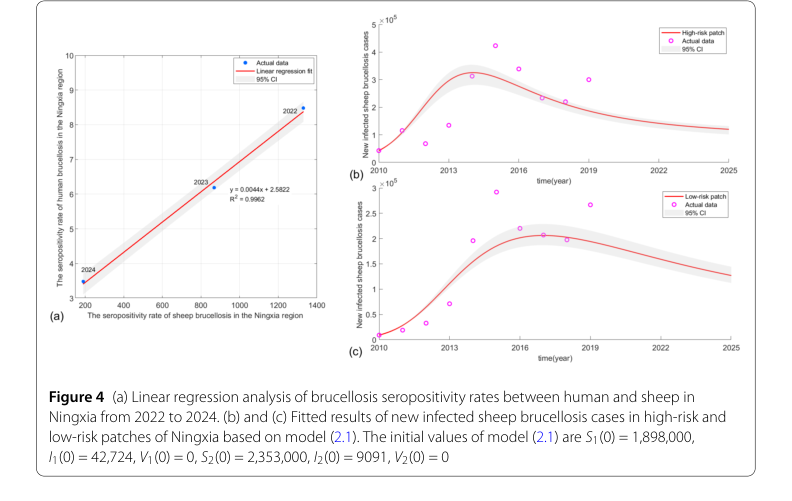 Figure 4. (a) Linear regression analysis of brucellosis seropositivity rates between human and sheep in Ningxia from 2022 to 2024. (b) and (c) Fitted results of new infected sheep brucellosis cases in high-risk and low-risk patches of Ningxia based on model (2.1). The initial values of model (2.1) are S1(0) = 1,898,000, I1(0) = 42,724, V1(0) = 0, S2(0) = 2,353,000, I2(0) = 9091, V2(0) = 0
Figure 4. (a) Linear regression analysis of brucellosis seropositivity rates between human and sheep in Ningxia from 2022 to 2024. (b) and (c) Fitted results of new infected sheep brucellosis cases in high-risk and low-risk patches of Ningxia based on model (2.1). The initial values of model (2.1) are S1(0) = 1,898,000, I1(0) = 42,724, V1(0) = 0, S2(0) = 2,353,000, I2(0) = 9091, V2(0) = 0