나이지리아, 중국의 브루셀라증에 대한 차별화된 최적 제어 전략: 2개 패치 동역학 모델로부터의 통찰
As a high-incidence region of brucellosis in China, the incidence pattern of brucellosis in Ningxia shows a significant spatial-temporal heterogeneity, thus, it is of significance to allocate the differentiated...
배경 및 학술적 계보
기원 및 학술적 계보
본 논문에서 다루는 문제는 특히 중국 나이지리아와 같이 발병률이 높은 지역에서 인수공통감염병인 브루셀라증의 지속적이고 공간적으로 이질적인 특성에서 비롯된다. 역사적으로 브루셀라증은 지중해, 중동, 아시아 일부 지역을 포함한 지역에서 상당한 유병률을 보이며 전 세계적인 우려 대상이었다 [1]. 중국에서는 1990년대 중반부터 이 질병이 눈에 띄게 재발하여 2014년에 정점을 찍었으며, 지리적 확산은 전통적인 목축 지역에서 농업 지역 및 심지어 남부 해안 지역까지 확대되었다 [3]. 이러한 확산은 이 질병의 이중적 위협을 강조했다. 즉, 동물 불임 및 생산 감소로 인해 축산업에 상당한 경제적 손실을 야기하는 동시에 [4, 5], 전 세계적으로 매년 수십만 건의 인간 사례가 보고되는 심각한 공중 보건 위험을 초래한다 [2].
이 특정 문제의 출현은 브루셀라증 전파가 상당한 시공간적 이질성과 군집성을 나타낸다는 관찰에서 비롯된다 [6, 7]. 특히 고위험 지역에서 저위험 지역으로의 지역 간 가축 이동 [8] 및 기압 및 온도와 같은 환경 조건 [9]과 같은 요인이 확산에 지대한 영향을 미친다. 이전의 역학 연구는 주로 예측을 위해 통계 모델에 의존했다. 그러나 이러한 모델은 서로 다른 위치와 시간에 걸쳐 전염병과 인간 활동 및 자연 환경 간의 복잡하고 역동적인 상호 작용을 포착하는 데 한계가 있음이 입증되었다. 이러한 근본적인 한계는 고위험 지역을 정확하게 식별하고 예방 및 통제를 위한 차별화된 자원 할당을 촉진할 수 있는 보다 정교한 접근 방식에 대한 시급한 필요성을 야기했다. 따라서 동역학 모델링은 이러한 공간적 이질성의 효과를 정량화하고 최적의 맞춤형 예방 전략을 공식화하기 위한 필수 도구가 되었다 [10-12]. 본 논문은 특히 양의 멜리텐시스균에 의해 심각한 브루셀라증 유행이 발생하는 지역인 나이지리아에 초점을 맞추어, 제한된 보건 자원을 고려한 정확하고 차별화된 통제 전략에 대한 정량적 기반을 제공하는 것을 목표로 한다.
직관적인 도메인 용어
- 브루셀라증 (Brucellosis): 감염된 동물(양 등)에서 인간으로 쉽게 옮겨져 양쪽 모두에게 장기적인 질병을 유발하는 매우 지속적인 "동물 독감"을 상상해 보세요. 농부들에게는 이중고입니다. 동물이 아파서 유산과 우유/육류 생산량 감소를 초래하고, 농부 자신도 감염될 수 있습니다.
- 시공간적 이질성 (Spatial-temporal heterogeneity): 질병이 균일한 안개처럼 퍼지는 것이 아니라, 얼룩덜룩하고 변화하는 폭풍처럼 퍼지는 것을 생각해보세요. 일부 마을에서는 다른 마을보다 훨씬 심각하며, 계절이나 몇 년에 걸쳐 강도가 변합니다. 이는 질병이 항상 모든 곳에서 동일한 강도로 퍼지는 것은 아니라는 것을 의미합니다.
- 패치 모델 (Patch model): 지역 지도를 몇 개의 뚜렷한 구역 또는 "이웃"으로 나눈 것을 상상해보세요. 패치 모델은 각 이웃 내에서 질병이 어떻게 퍼지고 서로 어떻게 이동하는지를 추적하는 것과 같습니다. 각 구역은 다른 조건이나 위험 수준을 가질 수 있음을 인정합니다.
- 기본 재생산수 ($R_0$) (Basic reproduction number): 이것은 질병의 "전염 점수"와 같습니다. 감염된 동물이 평균적으로 하나 이상의 다른 동물을 감염시키면 점수는 1 이상이며 질병은 퍼질 가능성이 높습니다. 하나 미만을 감염시키면 점수는 1 미만이며 질병은 결국 사라질 것입니다.
- 최적 제어 전략 (Optimal control strategy): 제한된 병력과 보급품으로 전쟁에서 승리하려는 장군을 고려해보세요. 최적 제어 전략은 장군에게 언제, 어디서, 얼마나 많은 자원(예: 백신, 이동 제한)을 배치해야 가장 효과적으로 승리(질병 최소화)할 수 있는지 정확히 알려주는 최상의 전투 계획입니다.
표기법 표
| 표기법 | 설명 |
|---|---|
문제 정의 및 제약 조건
핵심 문제 공식화 및 딜레마
본 논문에서 다루는 핵심 문제는 나이지리아, 중국 지역에서 높은 발병률과 질병의 상당한 시공간적 이질성을 특징으로 하는 브루셀라증에 대한 효과적이고 차별화된 최적 제어 전략을 개발하는 것입니다.
입력 또는 현재 상태는 브루셀라증 전파가 뚜렷한 시공간적 패턴을 나타내어 고위험 및 저위험 지역(그림 1에 설명됨)을 초래하는 복잡한 역학 상황입니다. 예방 및 통제를 위한 보건 자원이 제한적이어서 균일한 개입 전략은 비효율적이며 종종 실행 불가능합니다. 또한, 지역 간 가축 이동은 질병 확산의 알려진 동인이므로 통제 노력을 복잡하게 만듭니다. 주로 통계 모델에 의존하는 이전 연구는 복잡한 시공간적 역학 및 인간 활동 및 자연 환경과의 상호 작용을 포착하는 데 어려움을 겪었습니다. 예방 접종이 가능하고 다소 효과적이지만(예: 약 65% 효능의 M5 백신), 자원 부족으로 인해 모든 지역에 걸쳐 균일한 적용 범위를 달성하는 것은 어렵습니다.
원하는 최종 상태 또는 목표 상태는 예방 접종 자원을 합리적으로 할당하고 효과적인 운송 감독을 시행함으로써 고위험 및 저위험 패치 모두에서 누적 감염 양 개체 수를 줄이는 것입니다. 이를 위해서는 다양한 지역의 특정 위험 수준에 맞춘 정확한 통제 전략에 정보를 제공할 정량적 프레임워크가 필요합니다.
본 논문이 연결하고자 하는 정확한 누락된 연결 또는 수학적 격차는 공간적 이질성(2개 패치 시스템)과 예방 접종 효과를 모두 통합하는 강력하고 공간적으로 명시적인 동역학 모델과 최적 제어 프레임워크가 부족하다는 것입니다. 구체적으로, 본 논문은 차별화된 개입을 고려하고 일반적인 전략을 넘어 자원 효율적이고 표적화된 접근 방식으로 나아가는 최적 제어 해법을 수학적으로 도출하고 평가하는 것을 목표로 합니다.
이전 연구자들이 갇혀 있었고 본 논문이 탐색하고자 하는 고통스러운 상충 관계 또는 딜레마는 심각한 자원 제약 하에서 포괄적인 질병 통제를 달성하는 동시에 브루셀라증 전파의 고유한 시공간적 이질성을 해결하는 과제입니다. 종종 한 지역 또는 한 가지 방법(예: 광범위한 예방 접종)으로 통제를 개선하려면 기하급수적으로 더 많은 자원이 필요하며, 이는 단순히 사용할 수 없습니다. 이 딜레마는 이주 패턴에 의해 더욱 악화됩니다. 이주가 저위험 패치의 브루셀라증 위험을 증가시킬 수 있지만, 고위험 지역에서는 "희석 효과"(11페이지 비고 2)를 가질 수도 있습니다. 이는 단순하고 차별화되지 않은 통제 조치가 특정 패치에서 상황을 실수로 악화시키거나 귀중한 자원을 잘못 할당할 수 있음을 의미합니다. 저자들은 개입이 효과적이고 자원적으로 신중하도록 균형을 맞추는 것을 목표로 합니다.
제약 조건 및 실패 모드
나이지리아의 브루셀라증 통제 문제는 다음과 같은 몇 가지 가혹하고 현실적인 제약 조건으로 인해 극도로 어렵습니다:
-
물리적/생물학적 제약 조건:
- 인수공통감염병 특성 및 전파 역학: 브루셀라증은 주로 감염된 동물(양)에서 인간으로 전파되는 인수공통감염병으로, 동물 건강과 공중 보건 모두를 포함하므로 통제 노력이 복잡합니다. 소형 반추동물에서 가장 병원성이 강한 종인 멜리텐시스균은 나이지리아에서 흔합니다(3페이지).
- 시공간적 이질성: 브루셀라증의 발병률은 공간과 시간에 따라 상당한 변화를 보이며, 균일한 접근 방식 대신 차별화된 접근 방식이 필요합니다(1페이지, 초록).
- 가축 이동: 지역 간 가축 이동은 질병 확산의 주요 동인입니다(2페이지). 따라서 국경 통제 및 운송 감독은 중요하지만 완벽하게 시행하기는 어렵습니다.
- 예방 접종 효능: 백신이 존재하지만 효능이 100%는 아닙니다(M5 백신 약 65%, 3페이지). 따라서 예방 접종만으로는 질병을 완전히 근절할 수 없습니다.
-
계산/수학적 제약 조건:
- 복잡한 전염병 역학: 브루셀라증의 전파 역학은 서로 다른 패치에 걸쳐 민감, 감염, 예방 접종된 개체군 간의 복잡한 상호 작용을 포함하며, 이는 더 간단한 통계 모델이 효과적으로 포착하기 어렵습니다(2페이지).
- 최적 제어 문제 복잡성: 최적 제어 해법을 도출하려면 상태 변수 및 관련 비용 상태 변수에 대한 미분 방정식 시스템을 풀어야 하며, 종종 비선형 함수와 폰트랴긴의 최대 원리 적용이 포함됩니다(4장, 11페이지). 제어 변수 $u_i(t)$는 $[0, 1]$로 제한되어 개입 노력의 실행 가능한 범위를 나타냅니다.
-
데이터 기반 제약 조건:
- 양 감염 데이터 부족: 상당한 제약 조건은 "양 무리에서 브루셀라증 감염에 대한 직접적인 데이터 부족"입니다(16페이지). 이로 인해 저자들은 인간 브루셀라증 양성률을 사용하여 선형 회귀 모델(5.1식)을 통해 양 감염률을 간접적으로 추정해야 합니다. 높은 $R^2$ 값에도 불구하고 이러한 간접 추정은 "데이터 편향"(21페이지)을 초래할 수 있습니다.
- 모델 단순화: 현재 모델은 각 패치 내에서 양의 균일한 혼합을 가정하며 질병 확산에 대한 개체군 구조(예: 연령, 번식 유형)의 영향을 무시합니다(21페이지).
- 결정론적 모델의 한계: 모델의 결정론적 특성은 전파에 영향을 미칠 수 있는 감염된 양의 무작위 이동과 같은 무작위 사건을 완전히 포착할 수 없습니다(21페이지).
-
자원 제약 조건:
- 제한된 보건 자원: 가장 중요한 제약 조건은 브루셀라증 예방 및 통제를 위해 사용 가능한 "제한된 보건 자원"입니다(1페이지, 초록; 3페이지). 이는 광범위하고 균일한 개입을 시행할 수 있는 능력에 직접적인 영향을 미칩니다.
- 제한된 면역 자원: 특히 면역을 위한 자원이 제한적이어서 전체 지역에 걸쳐 균일한 예방 접종 적용 범위를 달성하기 어렵습니다(3페이지).
- 불균등한 자원 분배: 보건 자원은 "상대적으로 불균등하게 분배"(20페이지)되어 있어 공평하고 효과적인 통제 노력을 더욱 복잡하게 만듭니다.
왜 이 접근 방식인가
선택의 불가피성
2개 패치 SIV(민감-감염-예방 접종) 양 동역학 모델과 최적 제어 이론의 결합은 나이지리아의 브루셀라증 전파의 고유한 복잡성을 고려할 때 단순한 선택이 아니라 불가피한 필요성이었습니다. 저자들은 특히 많은 역학 연구에서 이전의 SOTA(State-of-the-Art) 방법, 특히 통계 모델의 한계를 명확히 인식했습니다. 서론에서 언급했듯이, "기존 연구는 주로 전염병 예측을 위해 통계 모델을 사용하는 데 중점을 두지만, 이러한 모델은 전염병 전파의 복잡한 역학을 처리하는 데 한계가 있으며 시공간적 상호 작용과 인간 활동 및 자연 환경을 효과적으로 포착하기 어렵습니다." 이 인식은 순전히 통계적 접근 방식에서 벗어나야 할 시점을 정확히 표시했습니다.
통계 모델은 예측에 유용하지만 종종 시간과 공간에 따른 질병 확산, 개체군 이동 및 개입 효과의 역동적인 상호 작용을 기계적으로 표현하는 데 어려움을 겪습니다. 나이지리아의 브루셀라증은 상당한 시공간적 이질성을 나타내므로, 그 유병률은 지리적 영역에 따라 상당히 다르며 시간이 지남에 따라 변합니다. 이러한 복잡한 역학을 특성화하고, 가장 중요하게는 최적의 차별화된 통제 전략을 공식화하기 위해 동적 모델링 프레임워크가 유일하게 실행 가능한 경로였습니다. SIV와 같은 구획 모델은 개체군 상태(민감, 감염, 예방 접종)와 그 사이의 전환을 명시적으로 표현할 수 있어 통계적 상관 관계만으로는 제공할 수 없는 기계적 이해를 제공합니다.
비교 우위
이 2개 패치 SIV 동역학 모델은 복잡하고 상호 작용하는 역학 과정을 포착하고 최적화하는 구조적 능력을 통해 이전 접근 방식에 비해 질적으로 우수합니다. 단순한 통계 모델과 달리 결과를 예측하는 것뿐만 아니라 질병이 왜와 어떻게 퍼지는지, 그리고 어떤 개입이 가장 효과적인지를 이해하기 위한 프레임워크를 제공합니다.
- 시공간적 이질성: 그림 1에 묘사된 "고위험" 및 "저위험" 패치로의 분할은 근본적인 구조적 이점입니다. 이를 통해 모델은 나이지리아와 같은 지역에 중요한 다양한 지리적 영역에서 질병 역학과 개입 요구를 설명할 수 있습니다.
- 동적 상호 작용 및 이동: 모델은 민감, 감염 및 예방 접종된 양에 대한 패치 간 이동률($a_{12}, a_{21}, b_{12}, b_{21}, c_{12}, c_{21}$)을 명시적으로 통합합니다. 이것은 질병 확산에 대한 지역 간 이동의 영향을 간과할 수 있는 통계적 방법이나 단일 패치 모델에 비해 중요한 구조적 개선입니다. 비고 2에서 강조하듯이 이동을 무시하면 "각 패치의 기본 재생산수를 과대평가하거나 과소평가할 수 있습니다."
- 최적 제어 프레임워크: 폰트랴긴의 최대 원리를 사용하여 최적 제어 해법($u_1$에서 $u_6$)을 도출하는 통합은 중요한 질적 도약입니다. 이를 통해 제한된 자원 제약 하에서 다양한 개입 전략(개인 보호, 예방 접종, 이동 감독)의 정량적 평가와 시간 경과에 따른 최적 할당이 가능합니다. 이는 단순한 성능 지표를 넘어 정적 효과 평가가 아닌 실행 가능한 시간별 전략을 제공합니다.
- 기계적 이해: SIV 구조는 질병 전파, 회복 및 면역에 대한 명확하고 해석 가능한 메커니즘을 제공하며, 이는 블랙박스 예측 모델보다 정책 수립에 더 강력합니다. 이를 통해 기본 재생산수($R_0$)와 같은 주요 역학 매개변수를 계산할 수 있어 질병 지속 및 안정성에 대한 통찰력을 제공합니다.
본 논문은 이러한 유형의 역학 모델링과 관련 대안(통계 모델, 더 간단한 ODE 모델) 간의 주요 비교 축이 아니기 때문에 고차원 노이즈 처리 또는 메모리 복잡성에 대해 논의하지 않습니다. 그 우수성은 공간적 상호 작용을 가진 복잡한 동적 시스템을 모델링하고 해당 시스템 내에서 개입을 최적화하는 능력에 있습니다.
제약 조건과의 일치
선택된 2개 패치 SIV 동역학 모델과 최적 제어 이론은 문제의 가혹한 요구 사항과 완벽하게 일치하여 문제와 해결책 간의 강력한 "결합"을 형성합니다.
- 공간적 이질성: 문제는 명시적으로 나이지리아를 "상당한 시공간적 이질성"을 가진 고발병률 지역으로 식별합니다. 2개 패치 구조(고위험 및 저위험)는 각 영역에서 별도의 매개변수와 역학, 그리고 그 사이의 상호 작용을 허용함으로써 이를 직접적으로 해결합니다.
- 제한된 보건 자원: 핵심 제약 조건은 "제한된 보건 자원 하에서" 예방 및 통제 목표를 달성해야 한다는 것입니다. 최적 제어 프레임워크는 본질적으로 이를 위해 설계되었습니다. 제어 노력과 관련된 비용과 누적 감염 개체 수를 모두 최소화하는 목적 함수(4.2)를 정의함으로써, 모델은 희소 자원의 가장 효율적인 할당을 위한 전략을 제공합니다.
- 차별화된 제어 전략: "차별화된 제어 전략"에 대한 요구는 두 패치 모두에 대한 다양한 개입(개인 보호, 예방 접종, 이동 감독)에 대한 여섯 가지 별도의 제어 함수($u_1$에서 $u_6$)를 정의하는 모델의 능력에 의해 충족됩니다. 최적 제어 솔루션은 이러한 제어의 이상적인 시간 가변 적용을 결정하여 각 패치의 특정 위험 프로필에 맞춘 전략으로 이어집니다.
- 개입 효과 정량화: 문제는 예방 접종 및 운송 감독의 예방 효과를 정량화할 필요성을 요구합니다. SIV 모델은 명시적으로 예방 접종 구획($V_i$)과 제어 변수($u_2, u_5$ 예방 접종용; $u_3, u_6$ 이동 감독용)을 포함하여 이러한 프로세스를 직접적으로 조절하여 최적 제어 프레임워크 내에서 그들의 정량적 평가를 가능하게 합니다.
대안의 기각
본 논문은 핵심 문제 특성을 해결하지 못하는 여러 대안적 접근 방식을 암묵적으로 그리고 명시적으로 기각합니다.
- 통계 모델: "전염병 예측을 위한 통계 모델"에 대한 가장 직접적인 기각입니다. 저자들은 이러한 모델이 "전염병 전파의 복잡한 역학을 처리하는 데 한계가 있으며 시공간적 상호 작용과 인간 활동 및 자연 환경을 효과적으로 포착하기 어렵다"고 말합니다. 이는 동적 확산과 최적 개입에 대한 기계적 이해가 필요한 문제에 대한 불충분성을 강조합니다.
- 단일 패치 동역학 모델: 명시적으로 명명되지는 않았지만, "시공간적 이질성"에 대한 본 논문의 강조와 "2개 패치" 모델의 구성은 단일 패치 모델을 본질적으로 기각합니다. 비고 2는 단일 패치 모델에서 이동을 무시하면 "각 패치의 기본 재생산수를 과대평가하거나 과소평가할 수 있다"고 설명하여 부정확한 평가와 최적이 아닌 전략으로 이어진다고 명시적으로 설명합니다. "지역 간 협력 복합 통제 전략"의 필요성 또한 다중 패치 접근 방식을 필요로 합니다.
- 확률적 사건에 대한 결정론적 모델: "한계" 섹션(6장)에서 저자들은 결정론적 모델이 "감염된 양의 무작위 이동과 같은 무작위 사건을 설명할 수 없다"는 점을 인정합니다. 이는 무작위성이 상당한 역할을 하는 시나리오에 대한 순전히 결정론적 모델의 사용을 기각하며, 향후 연구에서 확률적 프로세스를 통합할 수 있음을 시사합니다.
- 일반적인 머신러닝 모델(예: GAN, Diffusion, Transformer): 프롬프트는 이러한 모델을 "SOTA" 방법으로 언급합니다. 그러나 최적 제어를 위한 역학 모델링의 맥락에서 이러한 모델은 직접적으로 적용 가능한 대안이 아닙니다. 이러한 모델은 다른 작업(예: 이미지 생성, 자연어 처리)을 위해 설계되었으며 질병 전파 역학을 모델링하고 해석 가능한 제어 정책을 도출하는 데 필요한 기계적 구조가 부족합니다. 본 논문은 이러한 특정 유형의 모델을 언급하거나 기각하지 않으며, 이는 전통적인 역학 모델링 비교의 범위를 벗어납니다. 관련 대안은 역학 및 수학적 모델링 영역 내에 있습니다.
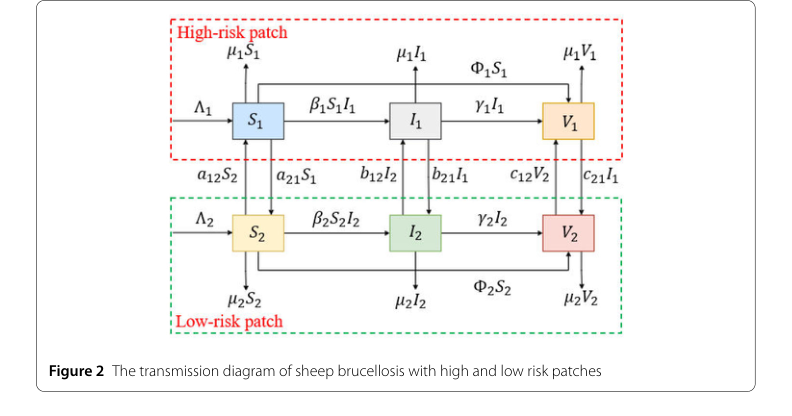 Figure 2. The transmission diagram of sheep brucellosis with high and low risk patches
Figure 2. The transmission diagram of sheep brucellosis with high and low risk patches
수학적 및 논리적 메커니즘
마스터 방정식
본 논문의 수학적 엔진의 핵심은 브루셀라증 전염병과 그 통제 노력과 관련된 총 비용을 정량화하는 목적 함수입니다. 목표는 지정된 시간 범위 $T$ 동안 이 함수를 최소화하는 것입니다. 이는 다음과 같이 표현됩니다.
$$ J = \int_0^T \left[ A_1I_1(t) + A_2I_2(t) + \frac{1}{2} \sum_{i=1}^6 B_i u_i^2(t) \right] dt $$
이 방정식은 제어 하의 2개 패치 SIV(민감-감염-예방 접종) 모델의 역학을 설명하는 상미분 방정식(ODE) 시스템과 함께 완전한 최적 제어 문제를 형성합니다. 양 개체군 역학을 정의하는 ODE는 $I_1(t)$, $I_2(t)$ 및 $u_i(t)$의 효과가 시간이 지남에 따라 어떻게 발전하는지를 결정하므로 암묵적으로 이 메커니즘의 일부입니다.
항별 분석
마스터 방정식과 그 구성 요소, 그리고 기본 동역학 시스템에 영향을 미치는 제어 변수를 자세히 살펴보겠습니다.
-
$J$:
- 수학적 정의: 총 누적 비용을 나타내는 스칼라 값입니다.
- 물리적/논리적 역할: 이것은 저자들이 최소화하고자 하는 양입니다. 이는 개입 기간 전체에 걸쳐 감염된 개체군으로 인한 전염병 부담과 통제 전략에 지출된 자원을 포괄적으로 측정하는 역할을 합니다.
- 왜 적분인가: 시스템의 역학은 시간에 따라 연속적이므로, 초기 시간 $t=0$부터 최종 시간 $t=T$까지 순간 비용을 연속적으로 합산하기 위해 적분이 사용됩니다. 이는 스냅샷이 아닌 총 누적 비용을 제공합니다.
-
$\int_0^T \dots dt$:
- 수학적 정의: 시간 구간 $[0, T]$에 대한 정적분입니다.
- 물리적/논리적 역할: 이 연산자는 적분값(주어진 시점의 비용 함수)의 순간값을 전체 개입 기간 동안 누적합니다.
- 왜 적분인가: 상태 변수와 제어 동작이 시간의 연속 함수로 간주되므로, 적분은 연속 기간 동안 그 효과를 합산하는 자연스러운 수학적 도구입니다.
-
$A_1I_1(t)$:
- 수학적 정의: 시간 $t$에서 패치 1의 양의 가중치 계수 $A_1$과 감염된 양 $I_1$의 곱입니다.
- 물리적/논리적 역할: 이 항은 고위험 패치(패치 1)의 감염된 개체군과 관련된 순간 비용 또는 부담을 나타냅니다. $A_1$이 높을수록 이 패치에서의 $I_1$ 감소에 대한 우선순위 또는 페널티가 더 크다는 것을 의미하며, 최적화를 통해 $I_1$을 줄이도록 유도합니다.
- 왜 덧셈인가: 바람직하지 않은 결과(감염)가 전체 부담에 기여하므로 총 비용에 추가되는 항입니다.
-
$A_2I_2(t)$:
- 수학적 정의: 시간 $t$에서 패치 2의 양의 가중치 계수 $A_2$와 감염된 양 $I_2$의 곱입니다.
- 물리적/논리적 역할: $A_1I_1(t)$와 유사하게, 이 항은 저위험 패치(패치 2)의 감염된 개체군과 관련된 순간 비용을 나타냅니다. $A_2$는 $I_2$ 감소의 중요성을 가중합니다.
- 왜 덧셈인가: 총 비용에 대한 가산 구성 요소로, 또 다른 부담의 원천을 반영합니다.
-
$A_1, A_2$:
- 수학적 정의: 양의 상수 계수입니다.
- 물리적/논리적 역할: 이들은 각 패치에서 감염된 개체군을 줄이는 상대적 중요성을 할당할 수 있도록 하는 "튜닝 매개변수"입니다. 예를 들어, $A_1 > A_2$이면 패치 1의 감염을 줄이는 것이 패치 2의 감염을 줄이는 것보다 더 중요하거나 비용이 많이 든다는 것을 의미합니다.
- 왜 계수인가: 제어 전략의 목표를 균형 있게 조정할 수 있게 해줍니다.
-
$I_1(t), I_2(t)$:
- 수학적 정의: 각각 시간 $t$에서 패치 1과 패치 2의 감염된 양의 수를 나타내는 상태 변수입니다. 이들은 음수가 아닌 실수입니다.
- 물리적/논리적 역할: 이들은 제어 전략의 주요 대상입니다. $J$를 최소화하는 것은 직접적으로 이러한 개체군을 줄이는 것을 목표로 합니다. 그 역학은 ODE 시스템(4.1)에 의해 지배됩니다.
-
$\frac{1}{2} \sum_{i=1}^6 B_i u_i^2(t)$:
- 수학적 정의: 양의 계수 $B_i$로 가중된 여섯 가지 제어 변수에 대한 각 제곱 항의 합의 절반입니다.
- 물리적/논리적 역할: 이 항은 제어 전략을 구현하는 순간 비용을 나타냅니다. 제곱 형태($u_i^2$)는 더 강한 제어 노력을 적용하면 불균형적으로 더 높은 비용이 발생한다는 것을 의미하며, 과도하거나 비현실적인 개입을 억제합니다. 또한 비용이 항상 음수가 아님을 보장합니다.
- 왜 합계인가: 여섯 가지의 별도 제어 조치가 있으며, 개별 비용이 집계되어 총 제어 비용을 형성합니다.
- 왜 제곱인가 ($u_i^2$): 제곱 형태는 여러 가지 이유로 최적 제어에서 표준 선택입니다. 비용이 항상 양수임을 보장하고, 더 큰 제어 노력을 더 심하게 페널티를 부여하며(최적화가 점진적인 이익에 대해 "더 열심히 일하도록" 만듦), 종종 목적 함수의 볼록성에 기여하여 고유한 최적 해를 찾는 것을 단순화합니다.
-
$B_i$:
- 수학적 정의: 각 제어 변수 $u_i$에 대한 양의 상수 계수입니다.
- 물리적/논리적 역할: 이러한 계수는 각 특정 제어 조치를 적용하는 상대적 비용을 결정합니다. $B_i$가 높을수록 제어 $u_i$는 구현하는 데 더 비싸거나 자원 집약적입니다.
- 왜 계수인가: 감염 감소와 특정 개입 비용 간의 균형을 미세 조정할 수 있게 해줍니다.
-
$u_i(t)$ ($u_1, \dots, u_6$):
- 수학적 정의: $[0, 1]$ 범위로 제한되는 시간 종속 제어 함수입니다.
- 물리적/논리적 역할: 이것들은 최적화 프로세스가 결정하고자 하는 의사 결정 변수입니다. 이들은 다양한 제어 조치의 강도 또는 효과를 나타냅니다.
- $u_1(t)$: 패치 1에서 개인 보호 행동의 제어 효과. ODE에서 효과적인 전파율 $(1-u_1)\beta_1S_1I_1$을 줄입니다.
- $u_2(t)$: 패치 1에서 예방 접종의 제어 효과. ODE에서 민감한 양 $S_1$을 예방 접종된 클래스 $V_1$으로 비율 $u_2S_1$로 이동시킵니다.
- $u_3(t)$: 패치 1에서 패치 2로의 이동에 대한 제어 효과. ODE에서 $S_1, I_1, V_1$의 패치 1에서 패치 2로의 유출을 줄입니다.
- $u_4(t)$: 패치 2에서 개인 보호 행동의 제어 효과. $u_1$과 유사하게 효과적인 전파율 $(1-u_4)\beta_2S_2I_2$을 줄입니다.
- $u_5(t)$: 패치 2에서 예방 접종의 제어 효과. $u_2$와 유사하게 민감한 양 $S_2$를 비율 $u_5S_2$로 $V_2$로 이동시킵니다.
- $u_6(t)$: 패치 2에서 패치 1로의 이동에 대한 제어 효과. $u_3$와 유사하게 $S_2, I_2, V_2$의 패치 2에서 패치 1로의 유출을 줄입니다.
단계별 흐름
시스템을 양 개체군이 구획과 패치를 이동하고 제어 레버에 의해 영향을 받는 복잡하고 상호 연결된 조립 라인으로 상상해 보세요.
-
초기 상태 설정: 프로세스는 고위험(패치 1) 및 저위험(패치 2) 영역 모두에서 민감한($S_1(0), S_2(0)$), 감염된($I_1(0), I_2(0)$), 예방 접종된($V_1(0), V_2(0)$) 양의 정의된 초기 수로 시작됩니다. 이러한 초기 조건은 전염병 궤적의 시작점을 설정합니다.
-
제어 레버 조정: 임의의 순간 $t$에서 여섯 개의 제어 레버($u_1(t)$부터 $u_6(t)$까지)는 개입 강도를 나타내는 특정 값으로 설정됩니다. 예를 들어, $u_2(t)$가 높으면 고위험 패치에서 강력한 예방 접종 캠페인이 활성화되었음을 의미합니다. $u_3(t)$가 높으면 패치 1에서 패치 2로의 양 이동을 제한하기 위한 엄격한 조치가 시행되었음을 의미합니다.
-
개체군 역학 시뮬레이션: 이러한 제어 설정은 여섯 개의 결합된 ODE 시스템(4.1)에 의해 설명되는 두 패치에서 각 양 개체군 변화율에 직접적인 영향을 미칩니다.
- 감염 감소: 제어 $u_1$ 및 $u_4$는 "보호막"처럼 작용하여 각 패치에서 민감한 양이 감염되는 속도를 줄입니다.
- 예방 접종 추진: 제어 $u_2$ 및 $u_5$는 "컨베이어"처럼 작용하여 민감한 양을 예방 접종된 구획으로 이동시켜 면역을 부여합니다.
- 이동 관리: 제어 $u_3$ 및 $u_6$는 "게이트키퍼"처럼 작용하여 두 패치 간의 민감, 감염 및 예방 접종된 양의 흐름을 규제합니다. 예를 들어, $u_3$는 패치 1에서 패치 2로 나가는 양을 줄이는 반면, $u_6$는 패치 2에서 패치 1로 나가는 양을 줄입니다.
- 자연적 과정: 제어와 함께 자연 출산율($A_1, A_2$), 자연 사망률($\mu_1, \mu_2$), 회복률($\gamma_1, \gamma_2$)은 개체군 크기에 지속적으로 영향을 미칩니다.
-
순간 비용 계산: 개체군이 발전함에 따라 각 순간 $t$에 두 가지 유형의 비용이 계산됩니다.
- 전염병 부담: 각 패치의 현재 감염된 양($I_1(t)$ 및 $I_2(t)$)은 $A_1$ 및 $A_2$로 가중되어 비용에 기여합니다. 이것은 질병의 지속적인 영향을 측정하는 "미터"와 같습니다.
- 개입 비용: 제어 레버($u_i(t)$)의 현재 설정도 $B_i$ 및 제곱으로 가중된 비용을 발생시킵니다. 이것은 개입에 얼마나 많은 자원이 소비되는지를 보여주는 "연료 게이지"와 같습니다.
-
총 비용 누적: 이러한 순간 비용은 적분 연산자에 의해 전체 개입 기간(t=0부터 t=T까지) 동안 연속적으로 합산되어 단일 총 비용 값 $J$를 생성합니다.
-
최적화 루프(개념적): 전체 "조립 라인"은 제어 레버($u_i(t)$ 함수)의 다른 설정으로 반복적으로 실행됩니다. 목표는 최종 누적 비용 $J$를 가능한 한 작게 만드는 특정 제어 함수 세트를 찾는 것입니다. 최적 제어 전략을 찾기 위한 이러한 검색은 최적화 역학의 본질입니다.
최적화 역학
메커니즘은 폰트랴긴의 최대 원리 적용을 통해 학습, 업데이트 및 수렴합니다. 이는 최적 제어 이론의 기본 도구입니다. 이 원리는 목적 함수 $J$를 시스템 역학 제약 조건 하에서 최소화하는 원래 문제를 해밀턴 함수를 포함하는 더 다루기 쉬운 문제로 변환합니다.
-
해밀턴 공식화: 첫 번째 단계는 비용 상태 변수($\lambda_{ij}$)에 의해 가중된 목적 함수 적분(순간 비용)과 상태 방정식의 오른쪽 부분을 결합하는 해밀턴 함수 $H$를 구성하는 것입니다. 비용 상태 변수는 본질적으로 전체 목적 함수에 대한 각 상태 변수의 그림자 가격 또는 한계 기여를 나타냅니다.
-
비용 상태 방정식(켤레 시스템): 최적 경로를 찾으려면 비용 상태 변수가 어떻게 발전하는지 이해해야 합니다. 이는 비용 상태 변수에 대한 미분 방정식 시스템(4.11식)을 도출하여 수행됩니다. 이 방정식은 해밀턴 함수를 각 상태 변수에 대해 편미분하여 얻어집니다. 중요한 것은 상태 방정식은 시간을 앞으로 진행하는 반면, 비용 상태 방정식은 일반적으로 종단 조건(여기서는 제어 기간 말의 상태에 대한 미래 비용이 없으므로 $\lambda_{ij}(T) = 0$)에서 시작하여 시간을 뒤로 풀어야 한다는 것입니다.
-
제어에 대한 최적성 조건: 최적 제어를 찾는 핵심은 각 시점에서 제어 변수에 대한 해밀턴 함수의 최소값을 찾는 것입니다. 이는 각 제어 변수에 대한 해밀턴 함수의 편미분을 0으로 설정하여($\frac{\partial H}{\partial u_i} = 0$) 달성됩니다. 이는 최적 제어 $u_i^*$ (4.12식)에 대한 명시적인 표현을 제공하며, 이는 상태 변수($S_i, I_i, V_i$)와 비용 상태 변수($\lambda_{ij}$) 모두의 함수입니다. 이러한 표현은 일반적으로 실행 가능한 제어 집합, 즉 각 $u_i$에 대해 $[0, 1]$로 "잘라내거나" 투영됩니다.
-
반복 솔루션(전방-후방 스윕): 상태 방정식(시간이 앞으로)과 비용 상태 방정식(시간이 뒤로)은 해밀턴 함수와 제어에 대한 최적성 조건을 통해 결합됩니다. 이는 직접 해결할 수 없는 2점 경계값 문제를 형성합니다. 대신, 종종 전방-후방 스윕이라고 하는 반복 수치 방법이 사용됩니다.
- 초기 추측: 전체 시간 범위 $[0, T]$에 대한 제어 함수 $u_i(t)$에 대한 초기 추측이 이루어집니다(예: 모두 0 또는 무작위 값).
- 전방 스윕: 현재 제어 추측을 사용하여 상태 방정식(4.1)을 초기 조건으로 $t=0$에서 $t=T$까지 시간 앞으로 적분합니다. 이를 통해 모든 개체군 크기($S_i(t), I_i(t), V_i(t)$)에 대한 궤적이 얻어집니다.
- 후방 스윕: 전방 스윕에서 얻은 상태 궤적을 사용하여 비용 상태 방정식(4.11)을 종단 조건으로 $t=T$에서 $t=0$까지 시간 뒤로 적분합니다. 이를 통해 모든 비용 상태 변수($\lambda_{ij}(t)$)에 대한 궤적이 얻어집니다.
- 제어 업데이트: 업데이트된 상태 및 비용 상태 궤적을 사용하여 최적성 조건(4.12)을 사용하여 새로운 개선된 제어 함수 $u_i(t)$ 세트를 계산합니다.
- 수렴 확인: 단계 2-4를 반복합니다. 제어 함수, 상태 변수 및 비용 상태 변수가 수렴할 때까지(즉, 연속 반복 간의 변화가 미리 정의된 허용 오차 아래로 떨어질 때까지) 프로세스가 계속됩니다. 이러한 반복적 개선을 통해 메커니즘은 최적 제어 전략을 "학습"할 수 있습니다.
-
손실 지형 및 기울기: 목적 함수 $J$는 다차원 "손실 지형"을 정의합니다. 최적화 프로세스는 본질적으로 이 지형을 탐색합니다. 비용 상태 변수는 일반화된 기울기로 생각할 수 있으며, 이 지형에서 가장 가파른 상승(또는 최소화를 위한 하강) 방향을 나타냅니다. 제어에 대한 목적 함수의 제곱 항($B_i u_i^2$)은 이 지형을 볼록하게 만드는 데 기여하며, 이는 일반적으로 반복 프로세스가 국소 최소값에 갇히지 않고 고유한 전역 최소값으로 수렴하도록 보장하는 바람직한 속성입니다. 반복적 업데이트는 총 비용을 줄이는 방식으로 제어를 조정하여 손실 지형을 따라 내려가 최소값에 도달하며, 이는 감염 감소와 개입 비용 간의 최적 균형을 나타냅니다. 이러한 반복 프로세스를 통해 모델은 시간 경과에 따른 가장 효과적이고 효율적인 제어 전략을 찾을 수 있습니다. 목적 함수에서 비용과 이익의 신중한 균형은 이 지형을 형성하여 실용적인 솔루션으로의 수렴을 안내합니다.
결과, 한계 및 결론
실험 설계 및 기준선
수학적 주장을 엄격하게 검증하기 위해 저자들은 포괄적인 실험 검증 프로세스를 시작했습니다. 접근 방식의 핵심은 2010년부터 2019년까지 나이지리아의 실제 감시 데이터를 사용하여 2개 패치 SIV 양 브루셀라증 모델(모델 2.1)을 보정하는 것이었습니다. 주요 과제는 감염된 양 개체군에 대한 직접적인 과거 데이터가 없다는 것이었습니다. 이를 극복하기 위해 그들은 2022년부터 2024년까지 나이지리아에서 관찰된 인간 브루셀라증 양성률(인구 10만 명당)에서 양의 브루셀라증 양성률($x$)을 추정하기 위해 선형 회귀 분석을 독창적으로 사용했습니다. 이를 통해 $y = 0.0044x + 2.5822 + \epsilon$이라는 강력한 선형 회귀 방정식이 도출되었으며, 여기서 $\epsilon \sim N(0,0.1544)$이고 결정 계수 $R^2 = 0.9962$로 인상적인 성능을 보였습니다(그림 4a에 설명됨). 이 관계를 통해 2010년부터 2019년까지 고위험 및 저위험 패치 모두에서 양의 감염된 양 사례를 추정할 수 있었습니다.
이 추정 데이터를 사용하여 모델(2.1)은 최소 제곱 방법을 사용하여 보정되었습니다. 모델의 초기 조건은 고위험 패치의 경우 $S_1(0) = 1,898,000$, $I_1(0) = 42,724$, $V_1(0) = 0$으로 설정되었고, 저위험 패치의 경우 $S_2(0) = 2,353,000$, $I_2(0) = 9091$, $V_2(0) = 0$으로 설정되었습니다. 출산율, 전염 계수, 예방 접종률, 자연 사망률, 회복률 및 패치 간 이동률을 포함한 다양한 매개변수는 데이터에서 조정되거나, 계산되거나, 기존 문헌에서 가져왔으며, 이는 표 1에 자세히 설명되어 있습니다.
제안된 최적 제어 전략과 비교된 "희생자" 또는 기준선 모델은 본질적으로 통제 개입이 적용되지 않은 시나리오였습니다. 이 "통제 없는" 상태는 폰트랴긴의 최대 원리에서 파생된 핵심 메커니즘인 차별화된 최적 제어 전략의 효과를 명확하게 입증하기 위한 벤치마크 역할을 했습니다. 다양한 제어 조합 하에서 감염된 양 사례의 누적 변화를 이 기준선과 비교함으로써, 그들은 제안된 개입이 질병 유병률을 크게 줄일 수 있다는 부인할 수 없는 증거를 찾았습니다.
증거가 증명하는 것
본 논문에서 제시된 증거는 제안된 차별화된 최적 제어 전략의 효과를 강력하게 지지합니다. 첫째, 모델 보정은 매우 성공적이었습니다. 고위험 및 저위험 패치 모두에서 감염된 양 사례에 대한 조정된 결과(그림 4b 및 4c)는 추정된 과거 데이터와 매우 일관되었습니다. 이러한 일관성은 모델의 예측 능력과 후속 최적 제어 분석에 대한 견고한 기반을 제공합니다.
특히 그림 5에 묘사된 수치 시뮬레이션은 시간 경과에 따른 최적 제어 해법의 존재와 동적 행동을 명확하게 보여줍니다. 그들의 접근 방식의 핵심 메커니즘인 2개 패치 SIV 모델에 최적 제어 이론을 적용하는 것은 특정 개입 프로필을 식별함으로써 현실에서 작동하는 것으로 나타났습니다.
- 고위험 패치의 예방 접종 ($u_2$): 이 제어 변수는 개입 기간 내내 최대값을 일관되게 유지하여 고위험 지역 내 브루셀라증 통제에서 그 중요성을 강조했습니다.
- 저위험 패치의 예방 접종 ($u_5$): 이 개입은 초기에 상당한 영향을 보였지만 나중에는 0으로 감소했습니다. 이는 장기적으로 저위험 지역에서 지속적인 높은 예방 접종률이 필요하지 않을 수 있음을 시사합니다.
- 저위험에서 고위험 패치로의 운송 제한 ($u_6$): 이 제어는 초기에 상대적으로 높은 수준을 유지했지만 이후 감소했습니다. 이는 질병이 고위험 지역으로 재유입되는 것을 방지하는 데 중요함을 나타냅니다.
- 고위험 패치의 건강 교육 ($u_1$) 및 고위험에서 저위험 패치로의 운송 ($u_3$): 이러한 제어는 후반 단계에서 증가했습니다. 이는 장기적으로 건강 교육 강화와 고위험에서 저위험 패치로의 양 운송 증가가 유익할 수 있음을 시사합니다.
- 저위험 패치의 건강 교육 ($u_4$): 이 제어는 낮은 수준을 유지하여 이러한 지역에서 질병 통제에 미치는 영향이 적음을 시사합니다.
더욱이, 지역 제어 전략(그림 7)에 대한 분석은 $u_2$(고위험 예방 접종) 및 $u_3$(고위험에서 저위험으로 운송)와 같은 개별 개입이 고위험 패치에서 감염을 크게 줄일 수 있고, $u_5$(저위험 예방 접종) 및 $u_6$(저위험에서 고위험으로 운송 제한)가 저위험 패치에서 효과적이지만, 지역 전략만으로는 나이지리아의 브루셀라증에 대한 전반적인 통제 목표를 달성하기에 충분하지 않을 수 있음을 보여주었습니다.
그들의 핵심 메커니즘 효과에 대한 결정적인 증거는 크로스 패치 복합 제어 전략(그림 8)의 평가에서 나왔습니다. 전략 $S_{12}$( $u_2$, $u_3$, $u_5$ 결합)는 고위험 패치에 대해 가장 효과적인 것으로 나타났으며, 감염된 양의 가장 큰 누적 감소를 가져왔습니다. 저위험 패치의 경우, 전략 $S_{10}$( $u_2$, $u_5$, $u_6$ 결합)는 가장 큰 양의 누적 변화를 생성하여 감염 감소에 대한 우수한 성능을 나타냈습니다. 이것은 각 패치의 특정 위험 수준에 맞춘 차별화되고 결합된 접근 방식이 효과적인 브루셀라증 통제에 중요하다는 것을 부인할 수 없이 증명합니다.
한계 및 향후 방향
이 연구는 귀중한 통찰력과 브루셀라증 통제를 위한 강력한 프레임워크를 제공하지만, 그 고유한 한계를 인정하는 것이 중요하며, 이는 자연스럽게 미래 연구를 위한 기회를 열어줍니다.
첫째, 중요한 한계는 양 브루셀라증 감염률의 간접 추정에서 비롯됩니다. 나이지리아의 양 무리에 대한 직접적인 과거 데이터가 부족하기 때문에 저자들은 선형 회귀 모델을 사용하여 인간 브루셀라증 발생률에서 이러한 비율을 추론해야 했습니다. 회귀가 높은 $R^2$ 값을 보였음에도 불구하고, 이 간접 추정 방법은 데이터 편향을 초래할 수 있습니다 [47]. 프록시 데이터에 대한 이러한 의존성은 모델 보정의 정확성과 결과적으로 도출된 최적 제어 전략에 영향을 미칠 수 있습니다.
둘째, 현재 모델은 각 패치 내에서 양 개체군이 균일하게 혼합된다고 가정하며, 개체군 구조의 복잡한 영향을 무시합니다. 연령, 다른 번식 유형 및 단순한 이동률을 넘어서는 특정 크로스 패치 상호 작용과 같은 요인은 명시적으로 고려되지 않습니다 [48]. 실제로는 이러한 구조적 요소가 질병 전파 역학을 크게 변경할 수 있으므로 모델이 다양한 가축 개체군에서 브루셀라증 확산의 복잡성을 완전히 포착하지 못할 수 있습니다.
셋째, 결정론적 모델의 사용은 본질적으로 무작위 사건을 설명하는 능력을 제한합니다. 질병 전파에 상당한 영향을 미칠 수 있는 감염된 양의 무작위 이동과 같은 현상은 현재 프레임워크로 포착할 수 없습니다 [49]. 실제 전염병은 예측 불가능한 사건의 영향을 받는 경우가 많으며, 결정론적 접근 방식은 이러한 중요한 측면을 과도하게 단순화할 수 있습니다.
앞으로 이러한 한계는 이러한 발견을 더욱 정교하게 발전시키기 위한 몇 가지 유망한 방향을 자연스럽게 제시합니다.
-
개체군 구조 통합: 향후 연구는 양 브루셀라증 모델에 더 상세한 개체군 구조를 통합하는 것을 목표로 해야 합니다. 여기에는 연령 구조화 모델 개발 또는 다양한 번식 유형(예: 유제품 양 대 육류 양)을 차별화하여 전파에서 특정 역할을 이해하는 것이 포함될 수 있습니다. 이러한 접근 방식은 다양한 하위 개체군이 전체 전염병에 어떻게 기여하는지에 대한 더 미묘한 이해를 제공하고 개입을 보다 정확하게 맞춤화할 수 있습니다.
-
확률성 모델링: 현재 모델의 결정론적 특성을 해결하기 위해 향후 작업에서는 확률적 프로세스를 통합할 수 있습니다. 특히, 환경 확률성 또는 무작위 이동 이벤트를 설명하기 위해 오른슈타인-울렌벡 프로세스를 사용하는 것은 매우 가치가 있을 것입니다. 이를 통해 무작위성이 전파 역학 및 제어 전략의 견고성에 미치는 영향에 대한 보다 현실적인 평가가 가능해져 보다 탄력적인 개입 계획으로 이어질 수 있습니다.
-
직접 데이터 수집 및 검증: 장기적인 목표는 양 무리에서 브루셀라증 감염에 대한 직접적이고 포괄적인 감시 데이터를 촉진하고 활용하는 것이어야 합니다. 이를 통해 간접 추정의 필요성이 제거되어 모델 보정 및 검증의 정확성이 크게 향상됩니다. 공중 보건 기관, 수의학 서비스 및 연구자 간의 협력적 노력은 이러한 데이터 수집 시스템을 구축하는 데 중요할 수 있습니다.
-
경제적 비용-이익 분석: 현재 연구는 감염된 개체군을 최소화하기 위한 최적 제어에 초점을 맞추고 있지만, 향후 연구는 다양한 제어 전략의 상세한 경제적 비용-이익 분석을 포함하도록 확장될 수 있습니다. 이는 제한된 보건 자원을 고려할 때 질병 감소와 자원 할당 효율성을 균형 있게 맞추는 보다 전체적인 관점을 정책 입안자에게 제공할 것입니다.
이러한 사항을 해결함으로써 발견은 더욱 정교해져 나이지리아와 같은 지역 및 그 너머에서 더욱 정확하고 강력하며 실용적인 브루셀라증 통제 전략으로 이어질 수 있습니다.
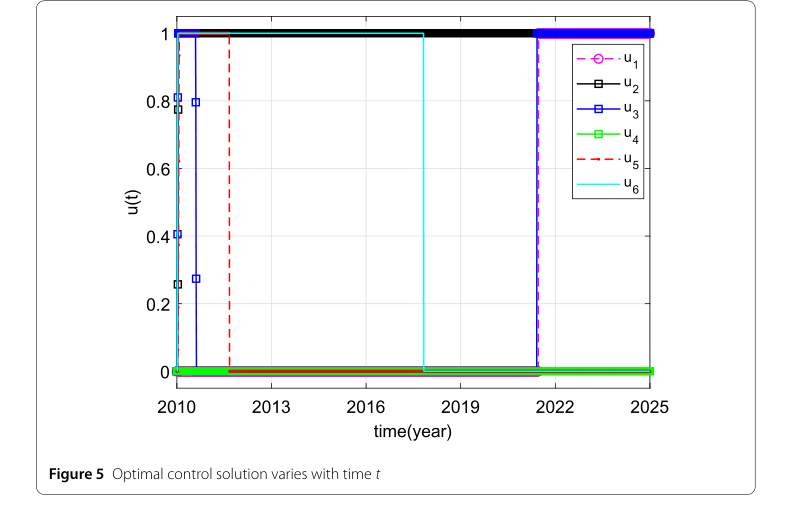 Figure 5. Optimal control solution varies with time t
Figure 5. Optimal control solution varies with time t
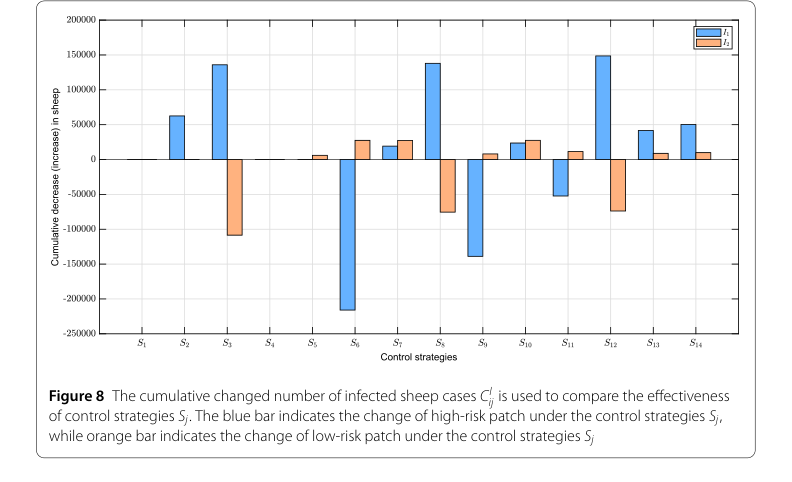 Figure 8. The cumulative changed number of infected sheep cases CI ij is used to compare the effectiveness of control strategies Sj. The blue bar indicates the change of high-risk patch under the control strategies Sj, while orange bar indicates the change of low-risk patch under the control strategies Sj
Figure 8. The cumulative changed number of infected sheep cases CI ij is used to compare the effectiveness of control strategies Sj. The blue bar indicates the change of high-risk patch under the control strategies Sj, while orange bar indicates the change of low-risk patch under the control strategies Sj
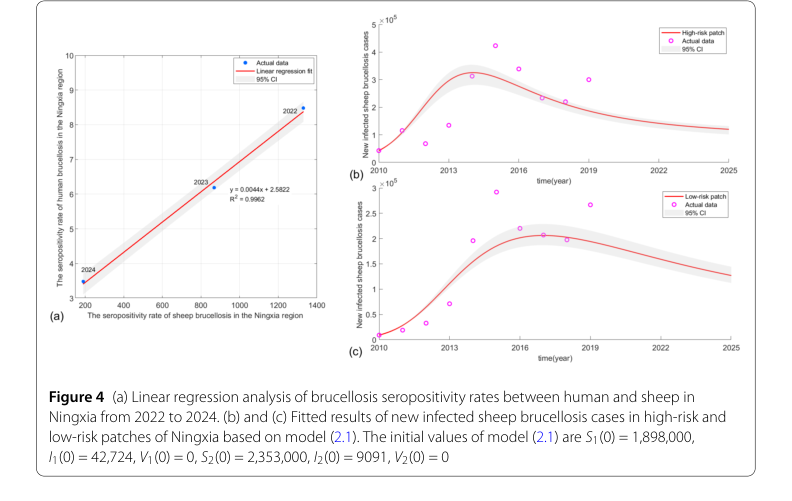 Figure 4. (a) Linear regression analysis of brucellosis seropositivity rates between human and sheep in Ningxia from 2022 to 2024. (b) and (c) Fitted results of new infected sheep brucellosis cases in high-risk and low-risk patches of Ningxia based on model (2.1). The initial values of model (2.1) are S1(0) = 1,898,000, I1(0) = 42,724, V1(0) = 0, S2(0) = 2,353,000, I2(0) = 9091, V2(0) = 0
Figure 4. (a) Linear regression analysis of brucellosis seropositivity rates between human and sheep in Ningxia from 2022 to 2024. (b) and (c) Fitted results of new infected sheep brucellosis cases in high-risk and low-risk patches of Ningxia based on model (2.1). The initial values of model (2.1) are S1(0) = 1,898,000, I1(0) = 42,724, V1(0) = 0, S2(0) = 2,353,000, I2(0) = 9091, V2(0) = 0