宁夏地区布鲁氏菌病差异化最优控制策略:来自双区域动力学模型的洞见
As a high-incidence region of brucellosis in China, the incidence pattern of brucellosis in Ningxia shows a significant spatial-temporal heterogeneity, thus, it is of significance to allocate the differentiated...
背景与学术渊源
起源与学术渊源
本文所研究的问题源于布鲁氏菌病(一种人畜共患传染病)的持续性和空间异质性,尤其是在中国宁夏等高发地区。历史上,布鲁氏菌病一直是全球关注的焦点,在地中海地区、中东以及亚洲部分地区均有显著流行,早期文献已有记载[1]。在中国,该病自20世纪90年代中期出现显著回升,于2014年达到高峰,其地理分布也从传统牧区扩展到农区乃至东南沿海地区[3]。这种扩张凸显了该疾病的双重威胁:一方面,由于动物不育和产量下降,给畜牧业造成巨大的经济损失[4, 5];另一方面,在全球范围内每年报告的数十万人类病例也构成了严重的公共卫生风险[2]。
本研究特定问题的出现,源于对布鲁氏菌病传播呈现显著时空异质性和聚集性[6, 7]的观察。诸如跨区域牲畜流动(尤其是从高风险区到低风险区)[8]以及气压和温度等环境条件[9]等因素,都深刻影响着其传播。以往的流行病学研究主要依赖统计模型进行预测。然而,这些模型在捕捉疫情与人类活动、自然环境在不同地点和时间上的复杂动态相互作用方面存在局限性。这一根本性局限催生了对更复杂方法的迫切需求,以精确识别高风险区域,并促进差异化防控资源的分配。因此,动力学建模成为量化这种空间异质性影响并制定最优、定制化防控策略的关键工具[10-12]。本文聚焦于宁夏地区,该地区因绵羊感染的马耳他布鲁氏菌(B. melitensis)而面临严重的布鲁氏菌病流行[26],旨在为在有限的卫生资源下制定精确、差异化的控制策略提供量化依据。
直观领域术语
- 布鲁氏菌病 (Brucellosis):可以想象一种非常顽固的“动物流感”,很容易从受感染的动物(如绵羊)传播给人类,导致两者都患上长期疾病。对农民来说,这是双重打击:他们的动物生病,导致流产和产奶/肉量减少,他们自己也可能感染。
- 时空异质性 (Spatial-temporal heterogeneity):想象一种疾病的传播不像均匀的雾气,而更像一场斑驳、变化的暴风雨。它在某些城镇比其他城镇严重得多,其强度随季节或几年而变化。这意味着疾病并非在所有时间、所有地方都具有相同的强度。
- 区域模型 (Patch model):想象一个区域地图被划分为几个不同的区域或“邻里”。区域模型就像追踪疾病在每个邻里内的传播以及它们之间的移动,承认每个区域可能具有不同的条件或风险水平。
- 基本再生数 ($R_0$) (Basic reproduction number):这就像疾病的“传染评分”。如果一只受感染的动物平均感染了另一只以上的动物,则该评分高于1,疾病很可能会传播。如果感染少于一只,则该评分低于1,疾病最终会消亡。
- 最优控制策略 (Optimal control strategy):考虑一位将军用有限的士兵和补给赢得战争。最优控制策略是最佳的战斗计划,它精确地告诉将军何时、何地、部署多少资源(例如疫苗、出行限制)才能最有效地取得胜利(最小化疾病)。
符号表
| 符号 | 描述 |
|---|---|
问题定义与约束
核心问题表述与困境
本文的核心问题是为中国宁夏地区制定有效且差异化的最优控制策略,该地区以高发病率和显著的时空异质性为特征。
输入或当前状态是复杂的流行病学形势,布鲁氏菌病的传播呈现出明显的时空模式,导致高风险区和低风险区的存在(如图1所示)。用于预防和控制的卫生资源有限,使得统一干预策略效率低下且常常不可行。此外,区域间的牲畜流动是疾病传播的已知驱动因素,这使控制工作复杂化。以往的研究主要依赖统计模型,难以捕捉复杂的时空动态以及与人类活动和自然环境的相互作用。虽然疫苗接种是可行的且有一定效果(例如,M5疫苗有效性约为65%),但由于资源稀缺,在所有区域实现统一覆盖具有挑战性。
期望终点或目标状态是通过合理分配疫苗资源和实施有效的运输监管,来减少高风险和低风险区域累积的感染绵羊数量。这需要一个量化框架来指导针对不同区域特定风险水平的精确控制策略。
本文试图弥合的确切缺失环节或数学鸿沟是缺乏一个稳健的、空间明确的动力学模型,该模型能够整合空间异质性(双区域系统)和疫苗接种效应,并辅以最优控制框架。具体而言,本文旨在数学上推导和评估考虑差异化干预的最优控制解决方案,超越通用策略,转向资源高效、有针对性的方法。
困扰以往研究人员并试图解决的痛苦权衡或困境是在资源严重有限的情况下实现全面的疾病控制,同时解决布鲁氏菌病传播的固有的时空异质性。通常,在一个区域或通过一种方法(例如广泛接种疫苗)改善控制,将需要指数级增长的资源,而这些资源根本不可用。迁徙模式进一步加剧了这种困境:虽然迁徙可能增加低风险区域的布鲁氏菌病风险,但它也可能在(第11页的Remark 2)高风险区域产生“稀释效应”,这意味着简单、不加区分的控制措施可能会无意中加剧某些区域的状况或错误分配宝贵的资源。作者旨在找到一个平衡点,确保干预措施既有效又节约资源。
约束与失效模式
宁夏地区布鲁氏菌病的控制问题因以下几个严峻的现实约束而变得极其困难:
-
物理/生物约束:
- 人畜共患性质与传播动力学: 布鲁氏菌病是一种人畜共患病,主要从受感染的动物(绵羊)传播给人类,使得控制工作复杂化,因为它同时涉及动物卫生和公共卫生。在宁夏地区,小反刍动物中最具致病性的马耳他布鲁氏菌(B. melitensis)流行(第3页)。
- 时空异质性: 布鲁氏菌病的发病率在空间和时间上表现出显著差异,需要差异化方法而非统一方法(第1页,摘要)。
- 牲畜迁徙: 跨区域牲畜流动是疾病传播的主要驱动因素(第2页),使得边境控制和运输监管至关重要但难以完美执行。
- 疫苗有效性: 虽然存在疫苗,但其有效性并非100%(M5疫苗约为65%,第3页),这意味着仅靠疫苗接种无法完全根除该疾病。
-
计算/数学约束:
- 复杂的流行病动力学: 布鲁氏菌病的传播动力学涉及不同区域易感、感染和接种人群之间复杂的相互作用,这些是简单统计模型难以有效捕捉的(第2页)。
- 最优控制问题复杂性: 推导最优控制解需要求解状态变量和相关协态变量的微分方程组,通常涉及非线性函数以及庞特里亚金最大值原理的应用(第4节,第11页)。控制变量 $u_i(t)$ 被限制在 $[0, 1]$ 范围内,代表干预措施的可行范围。
-
数据驱动约束:
- 绵羊感染数据稀缺: 一个显著的约束是“缺乏绵羊群布鲁氏菌感染的直接数据”(第16页)。这迫使作者利用人类布鲁氏菌阳性率通过线性回归模型间接估算绵羊感染率(方程5.1)。尽管$R^2$值很高,但这种间接估算引入了潜在的“数据偏差”(第21页)。
- 模型简化: 当前模型假设绵羊在每个区域内混合均匀,并忽略了人口结构(例如年龄、育种类型)对疾病传播的影响(第21页)。
- 确定性模型局限性: 模型的确定性性质无法完全捕捉随机事件,例如受感染绵羊的随机迁徙,这会影响传播(第21页)。
-
资源约束:
- 有限的卫生资源: 最根本的约束是用于布鲁氏菌病预防和控制的“有限的卫生资源”(第1页,摘要;第3页)。这直接影响了实施广泛、统一干预的能力。
- 有限的免疫接种资源: 特别是有限的免疫接种资源,使得在整个区域实现统一疫苗接种覆盖具有挑战性(第3页)。
- 资源分布不均: 卫生资源“相对分布不均”(第20页),进一步加剧了公平和有效的控制工作的复杂性。
为何选择此方法
选择的必然性
采用双区域易感-感染-接种(SIV)绵羊动力学模型并结合最优控制理论,并非仅仅是一种选择,而是鉴于宁夏地区布鲁氏菌病传播固有复杂性的必然要求。作者明确认识到传统“SOTA”方法(特别是统计模型)的局限性,而这些方法在许多流行病学研究中曾是之前的黄金标准。正如引言中所述,“现有研究主要集中于使用统计模型进行疫情预测,但这些模型在处理复杂的疫情传播动力学方面存在局限性,并且难以有效捕捉与人类活动和自然环境的时空相互作用。”这一认识标志着偏离纯粹统计方法变得势在必行的时刻。
统计模型虽然在预测方面很有用,但通常难以从机制上表示疾病传播、人口流动和干预效果随时间和空间相互作用的动态。宁夏地区的布鲁氏菌病表现出显著的时空异质性,意味着其患病率在不同地理区域差异很大,并随时间变化。为了表征这些复杂的动力学,并至关重要的是,为了制定最优和差异化的控制策略,动态建模框架是唯一可行的途径。SIV等区室模型允许明确表示人口状态(易感、感染、接种)以及它们之间的转换,提供了一种统计相关性本身无法提供的机制性理解。
比较优势
该双区域SIV动力学模型通过其结构上捕捉和优化复杂、相互作用的流行病学过程的能力,提供了优于先前方法的定性优势。与更简单的统计模型不同,它不仅仅预测结果;它提供了一个理解疾病传播为何和如何发生,以及哪些干预措施最有效的框架。
- 时空异质性: 如图1所示,划分为“高风险”和“低风险”区域是其根本的结构优势。这使得模型能够考虑不同地理区域不同的疾病动力学和干预需求,这对于宁夏这样的地区至关重要。
- 动态相互作用与迁徙: 该模型明确纳入了易感、感染和接种绵羊在区域间的迁徙率($a_{12}, a_{21}, b_{12}, b_{21}, c_{12}, c_{21}$)。这是对单区域模型或可能忽略跨区域流动对疾病传播影响的统计方法的关键结构改进。正如Remark 2所强调的,忽略迁徙可能“高估或低估不同区域的基本再生数”。
- 最优控制框架: 整合庞特里亚金最大值原理以推导最优控制解($u_1$至$u_6$)是重要的定性飞跃。这使得在资源有限的约束下,能够定量评估不同的干预策略(个人防护、疫苗接种、迁徙监管)及其最优时间分配。这超越了简单的性能指标,提供了可操作的、随时间变化的策略,而不仅仅是静态有效性评估。
- 机制性理解: SIV结构提供了疾病传播、恢复和免疫的清晰、可解释的机制,这比黑箱预测模型更适合政策制定。它允许计算基本再生数($R_0$)等关键流行病学参数,从而提供疾病持续性和稳定性的见解。
本文未讨论高维噪声处理或记忆复杂度,因为这些并非该类流行病学模型与其相关替代方法(统计模型、简单ODE模型)的主要比较轴。其优越性在于其能够对具有空间相互作用的复杂动态系统进行建模,并在该系统中优化干预措施。
与约束的契合
所选的双区域SIV动力学模型结合最优控制理论,与问题的严苛要求完美契合,形成了问题与其解决方案之间牢固的“联姻”。
- 空间异质性: 问题明确指出宁夏是“时空异质性显著”的高发病率地区。双区域结构(高风险和低风险)通过允许每个区域具有不同的参数和动力学,以及它们之间的相互作用,直接解决了这一问题。
- 有限的卫生资源: 核心约束是“在有限的卫生资源下”实现预防和控制目标。最优控制框架本质上就是为此设计的。通过定义一个目标函数(4.2),该函数同时最小化累积感染人群和控制措施的相关成本,模型提供了最有效分配稀缺资源的策略。
- 差异化控制策略: “差异化控制策略”的要求通过模型定义六种不同的控制函数($u_1$至$u_6$)来满足,这些函数针对各种干预措施(个人防护、疫苗接种、迁徙监管)在两个区域的应用。最优控制解随后确定了这些控制措施在时间上的理想应用,从而制定了针对每个区域特定风险状况的定制策略。
- 量化干预效果: 问题要求量化疫苗接种和运输监管的预防效果。SIV模型明确包含了疫苗接种区室($V_i$)和控制变量($u_2, u_5$用于疫苗接种;$u_3, u_6$用于迁徙监管),这些变量直接调节这些过程,从而允许在最优控制框架内对其进行定量评估。
替代方案的拒绝
本文基于替代方案无法解决核心问题特征的能力,对其进行了隐含和明确的拒绝。
- 统计模型: 最直接的拒绝是针对“用于疫情预测的统计模型”。作者指出,这些模型“在处理复杂的疫情传播动力学方面存在局限性,并且难以有效捕捉与人类活动和自然环境的时空相互作用。”这凸显了它们对于需要对动态传播进行机制性理解和最优干预的问题来说是不够的。
- 单区域动力学模型: 虽然未明确命名,但本文强调“时空异质性”和构建“双区域”模型,本身就拒绝了单区域模型。Remark 2进一步巩固了这一点,解释说在单区域模型中忽略迁徙“可能高估或低估不同区域的基本再生数”,导致评估不准确和策略次优。对“跨区域协同联合防控策略”的需求也需要多区域方法。
- 随机事件的确定性模型: 在“局限性”部分(第6节),作者承认其确定性模型无法描述“受感染绵羊的随机迁徙等随机事件”。这表明对于随机性起重要作用的场景,纯粹的确定性模型被拒绝,暗示未来的工作可能包含随机过程,如Ornstein-Uhlenbeck过程。
- 通用机器学习模型(例如,GANs、Diffusion、Transformers): 提示中将这些列为“SOTA”方法。然而,在流行病学建模以进行最优控制的背景下,它们并非直接适用的替代方案。它们设计用于不同的任务(例如,图像生成、自然语言处理),缺乏对疾病传播动力学建模和推导可解释控制策略所需的机制性结构。本文未提及或拒绝这些特定类型的模型,因为它们超出了传统流行病学模型比较的范围。相关的替代方案属于流行病学和数学建模的范畴。
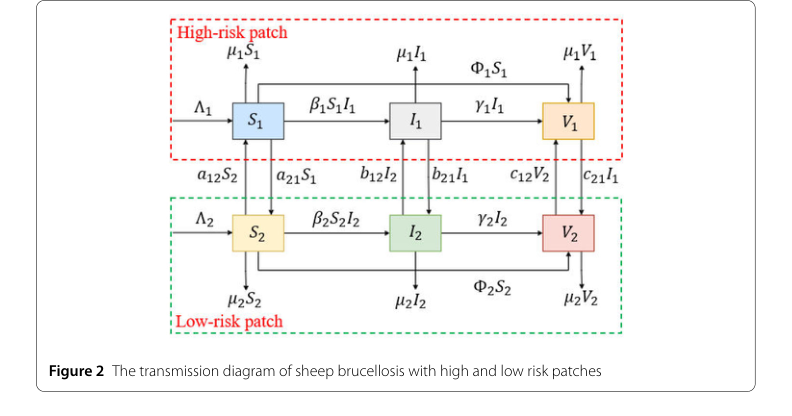 Figure 2. The transmission diagram of sheep brucellosis with high and low risk patches
Figure 2. The transmission diagram of sheep brucellosis with high and low risk patches
数学与逻辑机制
核心方程
本文数学引擎的绝对核心是目标函数,它量化了布鲁氏菌病疫情及其控制措施的总体成本。目标是在指定的时间范围 $T$ 内最小化该函数。其表达式为:
$$ J = \int_0^T \left[ A_1I_1(t) + A_2I_2(t) + \frac{1}{2} \sum_{i=1}^6 B_i u_i^2(t) \right] dt $$
该方程与描述双区域SIV(易感-感染-接种)模型在控制下的常微分方程(ODE)系统一起,构成了完整的最优控制问题。ODE系统定义了绵羊种群的动力学,它们隐含在此机制中,因为它们决定了 $I_1(t)$、$I_2(t)$ 以及 $u_i(t)$ 的影响如何随时间演变。
项的逐一剖析
让我们剖析核心方程及其组成部分,以及影响底层动力学系统的控制变量:
-
$J$:
- 数学定义:一个标量值,代表总累积成本。
- 物理/逻辑作用:这是作者旨在最小化的量。它作为疫情负担(由于感染人群)和整个干预期间用于控制策略的资源消耗的综合衡量标准。
- 为何是积分:系统的动力学是随时间连续变化的,因此使用积分来连续累加瞬时成本,从初始时间 $t=0$ 到最终时间 $t=T$。这提供了总的、累积的成本,而不是一个快照。
-
$\int_0^T \dots dt$:
- 数学定义:在时间区间 $[0, T]$ 上的定积分。
- 物理/逻辑作用:该算子将积分号内表达式(给定时刻的成本函数)的瞬时值在整个控制干预期间累加起来。
- 为何是积分:由于状态变量和控制动作被视为时间的连续函数,积分是求和其在连续时期内影响的自然数学工具。
-
$A_1I_1(t)$:
- 数学定义:正权重系数 $A_1$ 与时间 $t$ 时区域1中感染绵羊数量 $I_1$ 的乘积。
- 物理/逻辑作用:这一项代表高风险区域(区域1)感染人群的瞬时成本或负担。较高的 $A_1$ 表明在优化中,减少 $I_1$ 的重要性或惩罚程度更大。
- 为何是加法:该项被加到总成本中,因为它代表了一个不良结果(感染),它增加了总体负担。
-
$A_2I_2(t)$:
- 数学定义:正权重系数 $A_2$ 与时间 $t$ 时区域2中感染绵羊数量 $I_2$ 的乘积。
- 物理/逻辑作用:与 $A_1I_1(t)$ 类似,这一项代表低风险区域(区域2)感染人群的瞬时成本。$A_2$ 加权了减少 $I_2$ 的重要性。
- 为何是加法:它是总成本的加法组成部分,反映了另一个负担来源。
-
$A_1, A_2$:
- 数学定义:正常数系数。
- 物理/逻辑作用:这些是“调优参数”,允许模型者分配减少每个区域感染人群的相对重要性。例如,如果 $A_1 > A_2$,则意味着减少区域1的感染比减少区域2更关键或成本更高。
- 为何是系数:它们提供了平衡控制策略目标的灵活性。
-
$I_1(t), I_2(t)$:
- 数学定义:状态变量,分别代表时间 $t$ 时区域1和区域2中感染绵羊的数量。它们是非负实数。
- 物理/逻辑作用:它们是控制策略的主要目标。最小化 $J$ 直接旨在减少这些数量。它们的动力学由ODE系统(4.1)控制。
-
$\frac{1}{2} \sum_{i=1}^6 B_i u_i^2(t)$:
- 数学定义:六个控制变量的二次项之和的一半,由正系数 $B_i$ 加权。
- 物理/逻辑作用:这一项代表实施控制策略的瞬时成本。二次形式($u_i^2$)意味着施加更强的控制措施会产生不成比例的更高成本,从而阻止过度或不切实际的干预。这还确保了成本始终为非负。
- 为何是求和:有六种不同的控制措施,它们的个体成本被汇总以形成总控制成本。
- 为何是二次方($u_i^2$):二次形式是最佳控制中的标准选择,原因有几点:它确保成本始终为正;它对较大的控制措施施加更重的惩罚(使得优化“更努力地工作”以获得递减的回报);它通常有助于目标函数的凸性,从而简化找到唯一最优解的过程。
-
$B_i$:
- 数学定义:每个控制变量 $u_i$ 的正常数系数。
- 物理/逻辑作用:这些系数决定了应用每种特定控制措施的相对成本。较高的 $B_i$ 意味着控制 $u_i$ 的实施成本更高或资源消耗更大。
- 为何是系数:它们允许微调减少感染与特定干预成本之间的平衡。
-
$u_i(t)$ ($u_1, \dots, u_6$):
- 数学定义:随时间变化的控制函数,被限制在 $[0, 1]$ 范围内。
- 物理/逻辑作用:这些是优化过程试图确定的决策变量。它们代表不同控制措施的强度或有效性:
- $u_1(t)$:区域1中个人防护行为的控制效果。在ODE中,它降低了有效传播率 $(1-u_1)\beta_1S_1I_1$。
- $u_2(t)$:区域1中疫苗接种的控制效果。在ODE中,它以速率 $u_2S_1$ 将易感绵羊移至接种类别 $V_1$。
- $u_3(t)$:控制从区域1到区域2的迁徙。在ODE中,它降低了 $S_1, I_1, V_1$ 从区域1流向区域2的流出量。
- $u_4(t)$:区域2中个人防护行为的控制效果。与 $u_1$ 类似,它降低了有效传播率 $(1-u_4)\beta_2S_2I_2$。
- $u_5(t)$:区域2中疫苗接种的控制效果。与 $u_2$ 类似,它以速率 $u_5S_2$ 将易感绵羊移至 $V_2$。
- $u_6(t)$:控制从区域2到区域1的迁徙。与 $u_3$ 类似,它降低了 $S_2, I_2, V_2$ 从区域2流向区域1的流出量。
分步流程
将系统想象成一个复杂、相互连接的装配线,绵羊种群在区域和隔间之间移动,并受到控制杆的影响。
-
初始状态设置:过程从高风险(区域1)和低风险(区域2)区域中易感($S_1(0), S_2(0)$)、感染($I_1(0), I_2(0)$)和接种($V_1(0), V_2(0)$)绵羊的定义数量开始。这些初始条件设定了疫情轨迹的起点。
-
控制杆调整:在任何给定时刻 $t$,六个控制杆($u_1(t)$ 至 $u_6(t)$)被设定为特定值,代表干预的强度。例如,如果 $u_2(t)$ 很高,则意味着在区域1中正在进行强有力的疫苗接种活动。如果 $u_3(t)$ 很高,则表示已采取严格措施限制绵羊从区域1迁往区域2。
-
种群动态模拟:这些控制设置直接影响两个区域中每个绵羊种群的变化率,如六个耦合ODE系统(4.1)所述。
- 感染减少:控制 $u_1$ 和 $u_4$ 像“盾牌”一样,降低了各自区域中易感绵羊被感染的速率。
- 疫苗接种驱动:控制 $u_2$ 和 $u_5$ 像“传送带”一样,将易感绵羊移入接种区室,使其获得免疫。
- 迁徙管理:控制 $u_3$ 和 $u_6$ 像“守门员”一样,调节易感、感染和接种绵羊在两个区域之间的流动。例如,$u_3$ 减少了离开区域1前往区域2的绵羊数量,而 $u_6$ 减少了离开区域2前往区域1的绵羊数量。
- 自然过程:除了控制措施,自然出生率($A_1, A_2$)、自然死亡率($\mu_1, \mu_2$)和恢复率($\gamma_1, \gamma_2$)也持续影响种群数量。
-
瞬时成本计算:随着种群的演变,在每个时刻 $t$,计算两种成本:
- 疫情负担:每个区域中当前感染绵羊的数量($I_1(t)$ 和 $I_2(t)$)会增加成本,由 $A_1$ 和 $A_2$ 加权。这就像一个衡量疾病持续影响的“仪表”。
- 干预费用:控制杆($u_i(t)$)的当前设置也会产生成本,由 $B_i$ 和平方项加权。这就像一个显示干预措施消耗多少资源的“燃油表”。
-
总成本累积:这些瞬时成本通过积分算子在整个干预时期(从 $t=0$ 到 $t=T$)被连续累加起来,从而得到一个总成本值 $J$。
-
优化循环(概念性):整个“装配线”会以不同的控制杆设置($u_i(t)$ 函数)重复运行。目标是找到一组特定的控制函数,使得最终累积成本 $J$ 尽可能小。这种寻找最优控制策略的搜索是优化动力学的本质。
优化动力学
该机制通过应用庞特里亚金最大值原理(最优控制理论中的一个基本工具)来学习、更新和收敛。该原理将最小化目标函数 $J$ 并受系统动力学约束的原始问题,转化为涉及哈密顿函数的一个更易于处理的问题。
-
哈密顿函数构建:第一步是构建哈密顿函数 $H$,如方程(4.10)所示。该函数将目标函数积分项(瞬时成本)与状态方程(种群动力学)的右侧项结合起来,每个项都由相应的“协态变量”($\lambda_{ij}$)加权。协态变量本质上代表了每个状态变量对总体目标函数的影子价格或边际贡献。
-
协态方程(伴随系统):为了找到最优路径,需要理解协态变量如何演变。这是通过推导协态变量的微分方程组(方程(4.11))来实现的。这些方程是通过取哈密顿函数相对于每个状态变量的偏导数得到的。关键在于,与向前推进的时间状态方程不同,协态方程通常是向后求解的,从一个终端条件开始(此处为 $\lambda_{ij}(T) = 0$,意味着在控制期结束时状态没有未来成本)。
-
控制的最优性条件:找到最优控制的关键在于在每个时间点上最小化哈密顿函数相对于控制变量。这是通过将哈密顿函数相对于每个控制变量的偏导数设为零($\frac{\partial H}{\partial u_i} = 0$)来实现的。这产生了最优控制 $u_i^*$ 的显式表达式(方程(4.12)),它们是状态变量($S_i, I_i, V_i$)和协态变量($\lambda_{ij}$)的函数。然后,这些表达式通常会被“裁剪”或投影到可行控制集上,即每个 $u_i$ 的 $[0, 1]$ 范围。
-
迭代求解(前向-后向扫描):状态方程(向前推进)和协态方程(向后推进)通过哈密顿函数和控制的最优性条件耦合在一起。这构成了一个无法直接求解的两点边值问题。取而代之的是,采用一种迭代数值方法,通常称为前向-后向扫描:
- 初始猜测:对整个时间范围 $[0, T]$ 内的控制函数 $u_i(t)$ 进行初始猜测(例如,全为零或随机值)。
- 前向扫描:使用当前的控制猜测,以初始条件为 $t=0$ 向前推进积分状态方程(4.1)至 $t=T$。这将产生所有种群数量($S_i(t), I_i(t), V_i(t)$)的轨迹。
- 后向扫描:使用前向扫描获得的轨迹,以终端条件为 $t=T$ 向后推进积分协态方程(4.11)至 $t=0$。这将产生所有协态变量($\lambda_{ij}(t)$)的轨迹。
- 控制更新:根据更新后的状态和协态轨迹,使用最优性条件(4.12)计算一组新的、改进的控制函数 $u_i(t)$。
- 收敛性检查:重复步骤2-4。过程持续进行,直到控制函数、状态变量和协态变量收敛,即连续迭代之间的变化低于预设的容差。这种迭代改进允许机制“学习”最优控制策略。
-
损失景观与梯度:目标函数 $J$ 定义了一个多维“损失景观”。优化过程本质上是在这个景观中导航。协态变量可以被认为是广义梯度,指示了这个景观中最大上升(或最小化时的下降)方向。目标函数中控制的二次项($B_i u_i^2$)有助于使该景观成为凸的,这是一个理想的特性,因为它通常保证迭代过程将收敛到唯一的全局最小值,而不是陷入局部最小值。迭代更新以一种减少总成本的方式调整控制,有效地沿着损失景观向下移动,直到达到最小值,这代表了减少感染与最小化干预成本之间的最优平衡。这种迭代过程允许模型找到随时间推移最有效和最经济的控制策略。成本和收益在目标函数中的仔细平衡塑造了这种景观,指导了收敛到一个实际解决方案。
结果、局限性与结论
实验设计与基线
为了严格检验其数学论断,作者进行了一项全面的实验验证过程。其方法的核心是利用宁夏地区2010年至2019年的真实监测数据来校准其双区域SIV绵羊布鲁氏菌病模型(模型2.1)。一个关键的挑战是缺乏直接的绵羊感染群体历史数据。为了克服这一困难,他们巧妙地采用线性回归分析,从2022年至2024年在宁夏观察到的人类布鲁氏菌病阳性率(每10万人)来估算绵羊布鲁氏菌病阳性率($x$)。这得到了一个稳健的线性回归方程:$y = 0.0044x + 2.5822 + \epsilon$,其中 $\epsilon \sim N(0,0.1544)$,决定系数 $R^2 = 0.9962$(如图4a所示)。这一关系使得他们能够估算2010年至2019年间高风险和低风险区域的绵羊新增感染病例。
有了这些估算数据后,模型(2.1)随后使用最小二乘法进行校准。模型初始条件设定为高风险区域的 $S_1(0) = 1,898,000$、$I_1(0) = 42,724$、$V_1(0) = 0$,以及低风险区域的 $S_2(0) = 2,353,000$、$I_2(0) = 9091$、$V_2(0) = 0$。各种参数,包括出生率、传播系数、疫苗接种率、自然死亡率、恢复率以及区域间的迁徙率,要么从数据拟合,要么计算得出,要么来自现有文献,如表1所示。
作为与所提出的最优控制策略进行比较的“受试者”或基线模型,基本上是没有采取任何控制干预措施的情景。这种“无控制”状态作为基准,以明确证明其核心机制——来自庞特里亚金最大值原理推导出的差异化最优控制策略——的有效性。通过将各种控制组合下的累积感染绵羊病例变化与此基线进行比较,他们寻求了其干预措施能够显著降低疾病流行率的无可辩驳的证据。
证据证明了什么
本文提供的证据有力地支持了所提出的差异化最优控制策略的有效性。首先,模型校准被证明是高度成功的;在高风险和低风险区域新增绵羊感染病例的拟合结果(图4b和4c)与估算的历年数据表现出极好的一致性。这种一致性为模型的预测能力和随后的最优控制分析奠定了坚实的基础。
数值模拟,特别是图5中描绘的模拟,清楚地展示了最优控制解决方案的存在及其随时间的动态行为。他们方法的核心机制,即最优控制理论在双区域SIV模型上的应用,通过识别具体的干预方案而显示出实际效果:
- 高风险区域的疫苗接种($u_2$):该控制变量在整个干预期间始终保持其最大值,突显了其在高风险区域布鲁氏菌病控制中的关键作用。
- 低风险区域的疫苗接种($u_5$):这项干预措施最初显示出显著影响,但在后期阶段下降至零,表明长期来看,低风险区域可能不需要持续的高疫苗接种率。
- 限制从低风险区域到高风险区域的运输($u_6$):这项控制措施最初保持在相对较高的水平,但随后有所下降,表明其在防止疾病重新引入高风险区域方面的重要性。
- 高风险区域的健康教育($u_1$)和从高风险区域到低风险区域的运输($u_3$):这些控制措施在后期阶段有所增加,暗示在长期内,加强健康教育和适度增加从高风险区域到低风险区域的绵羊运输可能是有益的。
- 低风险区域的健康教育($u_4$):这项控制措施保持在较低水平,表明其对这些区域的疾病控制影响较小。
此外,对局部控制策略的分析(图7)显示,虽然像 $u_2$(高风险区域疫苗接种)和 $u_3$(从高风险区域到低风险区域运输)这样的个体干预措施可以显著减少高风险区域的感染,而 $u_5$(低风险区域疫苗接种)和 $u_6$(限制从低风险区域到高风险区域运输)在低风险区域有效,但仅靠局部策略可能不足以实现宁夏地区布鲁氏菌病的总体控制目标。
他们核心机制有效性的决定性证据来自于跨区域联合控制策略的评估(图8)。策略 $S_{12}$(结合 $u_2$、$u_3$ 和 $u_5$)成为高风险区域最有效的策略,导致感染绵羊数量的累积减少最大。对于低风险区域,策略 $S_{10}$(结合 $u_2$、$u_5$ 和 $u_6$)产生了最大的累积正变化,表明其在减少感染方面的卓越表现。这无可辩驳地证明了差异化、联合的方法,针对每个区域特定的风险水平,对于有效的布鲁氏菌病控制至关重要。
局限性与未来方向
尽管这项研究提供了宝贵的见解和稳健的布鲁氏菌病控制框架,但认识到其固有的局限性并自然地为未来研究开辟道路至关重要。
首先,一个显著的局限性源于绵羊布鲁氏菌感染率的间接估算。由于宁夏地区缺乏绵羊感染群体的直接历史数据,作者不得不使用线性回归模型从人类布鲁氏菌病发病率中推断这些比率。尽管回归显示出较高的 $R^2$ 值,但这种间接估算方法可能引入数据偏差[47]。这种对代理数据的依赖可能会影响模型校准的精度,进而影响推导出的最优控制策略。
其次,当前模型假设每个区域内的绵羊种群混合均匀,忽略了种群结构复杂的潜在影响。诸如年龄、不同育种类型以及超出简单迁徙率的特定跨区域相互作用等因素未被明确考虑[48]。实际上,这些结构性因素会显著改变疾病传播动力学,意味着模型可能无法完全捕捉不同牲畜种群中布鲁氏菌病的传播复杂性。
第三,使用确定性模型本身就限制了其描述随机事件的能力。诸如受感染绵羊的随机迁徙等现象,可能对疾病传播产生相当大的影响,而当前框架无法捕捉[49]。现实世界的疫情通常受到不可预测事件的影响,而确定性方法可能过度简化了这些关键方面。
展望未来,这些局限性自然地为进一步发展和演进这些发现提供了几个有前景的方向:
-
整合种群结构:未来的研究应致力于将更详细的种群结构整合到绵羊布鲁氏菌病模型中。这可能包括开发一个年龄结构模型,或区分不同的育种类型(例如,奶羊与肉羊),以更好地理解它们在传播中的特定作用。这种方法将提供对不同亚群对总体疫情贡献以及如何更精确地定制干预措施的更细致的理解。
-
模拟随机性:为了解决当前模型的确定性性质,未来的工作可以纳入随机过程。具体而言,使用Ornstein-Uhlenbeck过程来描述环境随机性或随机迁徙事件将非常有价值。这将允许对随机性如何影响传播动力学和控制策略的稳健性进行更现实的评估,可能导致更具韧性的干预计划。
-
直接数据收集与验证:一个长期目标应该是促进和利用绵羊感染群体的直接、全面的布鲁氏菌病监测数据。这将消除间接估算的需要,显著提高模型校准和验证的准确性。公共卫生机构、兽医服务部门和研究人员之间的合作努力,对于建立此类数据收集系统至关重要。
-
经济成本效益分析:虽然当前研究侧重于通过最优控制最小化感染人群,但未来的研究可以扩展到包括详细的经济成本效益分析。这将为政策制定者提供一个更全面的视角,在疾病减少与资源配置效率之间取得平衡,尤其是在卫生资源有限的情况下。
通过解决这些问题,可以进一步完善研究成果,从而在宁夏及其他地区制定更精确、更稳健、更实用的布鲁氏菌病控制策略。
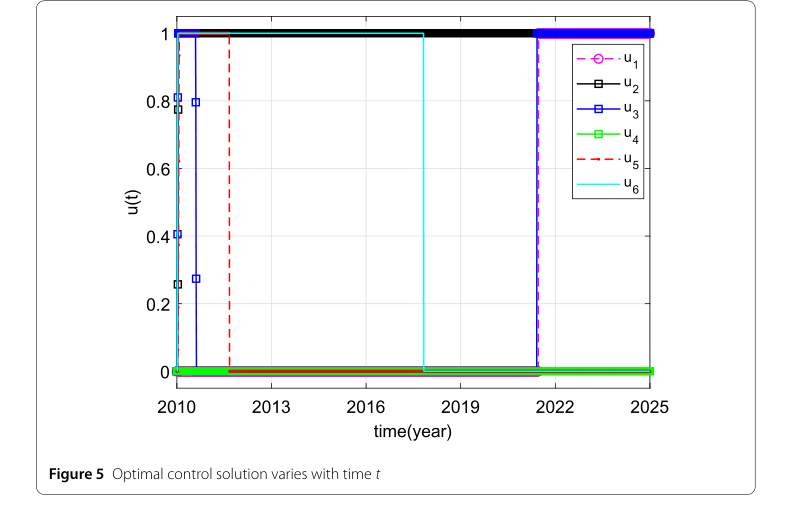 Figure 5. Optimal control solution varies with time t
Figure 5. Optimal control solution varies with time t
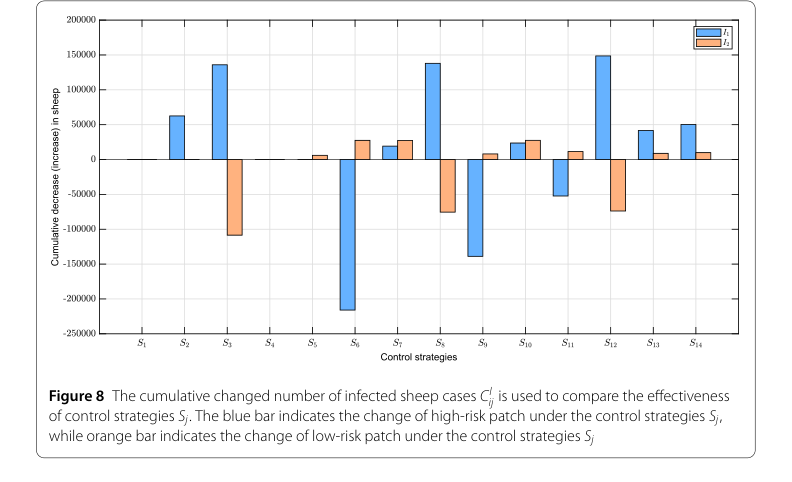 Figure 8. The cumulative changed number of infected sheep cases CI ij is used to compare the effectiveness of control strategies Sj. The blue bar indicates the change of high-risk patch under the control strategies Sj, while orange bar indicates the change of low-risk patch under the control strategies Sj
Figure 8. The cumulative changed number of infected sheep cases CI ij is used to compare the effectiveness of control strategies Sj. The blue bar indicates the change of high-risk patch under the control strategies Sj, while orange bar indicates the change of low-risk patch under the control strategies Sj
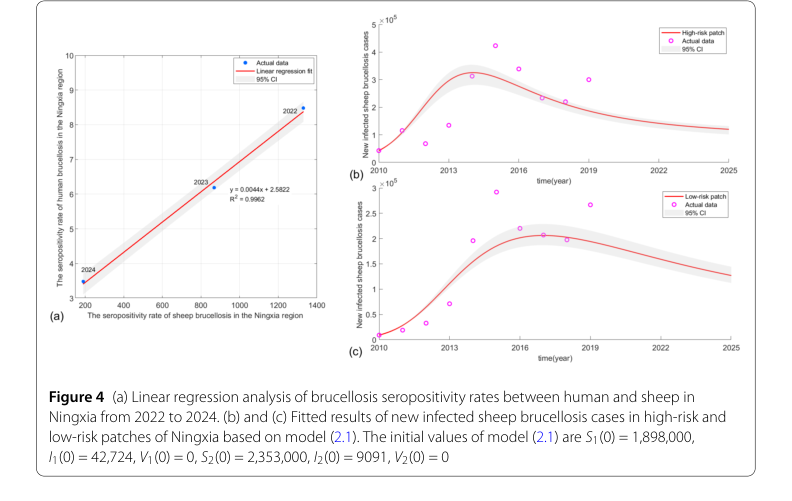 Figure 4. (a) Linear regression analysis of brucellosis seropositivity rates between human and sheep in Ningxia from 2022 to 2024. (b) and (c) Fitted results of new infected sheep brucellosis cases in high-risk and low-risk patches of Ningxia based on model (2.1). The initial values of model (2.1) are S1(0) = 1,898,000, I1(0) = 42,724, V1(0) = 0, S2(0) = 2,353,000, I2(0) = 9091, V2(0) = 0
Figure 4. (a) Linear regression analysis of brucellosis seropositivity rates between human and sheep in Ningxia from 2022 to 2024. (b) and (c) Fitted results of new infected sheep brucellosis cases in high-risk and low-risk patches of Ningxia based on model (2.1). The initial values of model (2.1) are S1(0) = 1,898,000, I1(0) = 42,724, V1(0) = 0, S2(0) = 2,353,000, I2(0) = 9091, V2(0) = 0
与其他领域的同构性
结构骨架
其核心在于,本文提出了一种机制,该机制优化了跨空间分隔的、相互作用的区域的资源分配和干预策略,以最小化动态过程的累积影响。