गैर-संतुलन प्रक्षेपवक्रों के साथ एन्ट्रॉपी उत्पादन का स्थानीयकरण
इस पत्र के मूल में समस्या गैर-संतुलन सांख्यिकीय भौतिकी में एक मौलिक और लंबे समय से चली आ रही चुनौती से उत्पन्न होती है: प्रयोगात्मक रूप से देखे गए डेटा से सीधे जटिल प्रणालियों के भीतर अपरिवर्तनीयता और ऊर्जा क्षय को...
पृष्ठभूमि और अकादमिक वंश
उत्पत्ति और अकादमिक वंश
इस पत्र के मूल में समस्या गैर-संतुलन सांख्यिकीय भौतिकी में एक मौलिक और लंबे समय से चली आ रही चुनौती से उत्पन्न होती है: प्रयोगात्मक रूप से देखे गए डेटा से सीधे जटिल प्रणालियों के भीतर अपरिवर्तनीयता और ऊर्जा क्षय को सटीक रूप से कैसे मापा जाए और स्थानिक-सामयिक रूप से स्थानीयकृत किया जाए। जबकि एन्ट्रॉपी उत्पादन की अवधारणा इन घटनाओं के लिए एक सार्वभौमिक मीट्रिक के रूप में कार्य करती है, गैर-संतुलन प्रक्षेपवक्रों के साथ इसका सटीक स्थानीयकरण अंतरिक्ष और समय में एक महत्वपूर्ण "खुली चुनौती" (पृष्ठ 2) बना हुआ है।
ऐतिहासिक रूप से, अकादमिक वंश स्टोकेस्टिक थर्मोडायनामिक्स [17-19] में हुई प्रगति और डेटा-संचालित दृष्टिकोणों [11, 20-23] के उद्भव का पता लगाता है। इन क्षेत्रों ने गैर-संतुलन प्रक्रियाओं की व्यक्तिगत वास्तविकताओं में एन्ट्रॉपी उत्पादन को समझने के लिए एक कठोर ढांचा प्रदान किया, खासकर जब तापीय उतार-चढ़ाव प्रमुख होते हैं [18, 26]। हालांकि, एक बड़ी बाधा बनी रही: एन्ट्रॉपी उत्पादन या क्षयकारी बल क्षेत्रों को मापने के लिए पारंपरिक तरीकों में आमतौर पर सिस्टम के अंतर्निहित गतिशील समीकरणों, जैसे फोकर-प्लैंक या मास्टर समीकरणों के पूर्व ज्ञान पर निर्भरता थी। कई यथार्थवादी प्रयोगात्मक परिदृश्यों में, ये समीकरण और उनके समाधान अज्ञात हैं, जिससे पारंपरिक दृष्टिकोण अव्यावहारिक हो जाते हैं (पृष्ठ 2)।
पिछला शोध मुख्य रूप से औसत एन्ट्रॉपी उत्पादन दर के वैश्विक अनुमानों को प्राप्त करने पर केंद्रित था। जबकि हाराडा-सासा समानता [6], स्थिर-अवस्था वर्तमान अनुमान [5], समय-अपरिवर्तनीयता माप [26-31], और पथ संभाव्यता अनुमानक [4, 32, 33] जैसे तरीकों ने मूल्यवान अंतर्दृष्टि प्रदान की, उन्होंने आम तौर पर क्षय की एक विस्तृत, स्थानीयकृत तस्वीर के बजाय एक समग्र माप प्रदान किया। एन्ट्रॉपी उत्पादन को स्थानीयकृत करने के प्रयास अक्सर सीमित थे: उदाहरण के लिए, ब्रूट-फोर्स सांख्यिकीय बिनिंग [20] उच्च-आयामी प्रणालियों के साथ खराब रूप से स्केल किया गया, और कुछ तंत्रिका नेटवर्क दृष्टिकोणों ने प्रक्षेपवक्रों के साथ एन्ट्रॉपी उत्पादन सीखा लेकिन अंतर्निहित क्षयकारी बल क्षेत्रों की संरचना को पूरी तरह से स्पष्ट नहीं किया [23]। अन्य विधियां केवल क्षयकारी बल क्षेत्र के भागों का अनुमान लगा सकती थीं, यह मानते हुए कि शेष घटक पहले से ही ज्ञात थे [11, 40]। मौलिक सीमा, या "दर्द बिंदु," जिसे यह पत्र संबोधित करने का प्रयास करता है, वह है जटिल, उच्च-आयामी और समय-निर्भर गैर-संतुलन प्रणालियों में, विशेष रूप से प्रयोगात्मक प्रक्षेपवक्र डेटा से सीधे क्षयकारी बल क्षेत्र और उतार-चढ़ाव वाले एन्ट्रॉपी उत्पादन की स्थानिक-सामयिक संरचना को अनुमानित करने के लिए एक मजबूत, स्केलेबल और मॉडल-मुक्त विधि की कमी, उनके शासी गतिशीलता के स्पष्ट ज्ञान की आवश्यकता के बिना। इस महत्वपूर्ण अंतर ने थर्मोडायनामिक अनिश्चितता संबंध (TUR) और मशीन लर्निंग का लाभ उठाने वाले प्रस्तुत डेटा-संचालित दृष्टिकोण के विकास को प्रेरित किया।
सहज डोमेन शब्द
- एन्ट्रॉपी उत्पादन ($\sigma$): एक पूरी तरह से व्यवस्थित कमरे की कल्पना करें। यदि आप एक पार्टी फेंकते हैं, तो चीजें अव्यवस्थित हो जाती हैं। "एन्ट्रॉपी उत्पादन" पार्टी के दौरान बनाई गई अपरिवर्तनीय अव्यवस्था की मात्रा की तरह है। उच्च मान अधिक अराजकता और कमरे को उसकी मूल स्थिति में आसानी से वापस लाने में अधिक असमर्थता का मतलब है।
- गैर-संतुलन प्रक्षेपवक्र: एक भीड़ भरे बाजार से गुजरने वाले व्यक्ति के बारे में सोचें। वे लगातार चल रहे हैं, लोगों से टकरा रहे हैं, दिशा बदल रहे हैं, और कभी भी संतुलित स्थिति में स्थिर नहीं रह रहे हैं। एक "गैर-संतुलन प्रक्षेपवक्र" वह विशिष्ट, घुमावदार पथ है जो वह व्यक्ति लेता है, हमेशा गति में और अपने परिवेश के साथ बातचीत करता है।
- थर्मोडायनामिक बल क्षेत्र ($F(\mathbf{x}, t)$): यह अदृश्य "धारा" या "हवा" की तरह है जो एक जटिल वातावरण में वस्तुओं को धकेलती और खींचती है, जिससे वे एक विशेष, अक्सर घूमते हुए, तरीके से चलते हैं। यह सिर्फ एक साधारण धक्का नहीं है, बल्कि एक गतिशील, स्थानिक रूप से भिन्न प्रभाव है जो सिस्टम को शांत, संतुलित स्थिति से दूर ले जाता है और ऊर्जा को क्षय करने का कारण बनता है।
- थर्मोडायनामिक अनिश्चितता संबंध (TUR): एक तंग रस्सी पर चलने वाले व्यक्ति पर विचार करें। "TUR" एक मौलिक नियम की तरह है जो कहता है, "जितनी तेज़ी से आप रस्सी पार करने की कोशिश करते हैं (उच्च एन्ट्रॉपी उत्पादन), उतना ही आपका शरीर हिलेगा और डगमगाएगा (आपकी गति में बड़े उतार-चढ़ाव अनिवार्य हैं)।" यह एक अपरिवर्तनीय कार्य को कितनी कुशलता से करते हैं और आपका पथ कितना अनुमानित होगा, इसके बीच एक व्यापार-बंद स्थापित करता है।
- ओवरडैम्प्ड डिफ्यूसिव प्रक्रियाएं: अभी हवा में धीरे-धीरे नीचे गिरते हुए एक छोटे पंख की कल्पना करें। इसका गिरना पूरी तरह से हवा के प्रतिरोध और यादृच्छिक हवा की धाराओं द्वारा निर्धारित होता है, न कि इसके अपने संवेग द्वारा। एक "ओवरडैम्प्ड डिफ्यूसिव प्रक्रिया" उस गति का वर्णन करती है जहां जड़ता नगण्य होती है, और गति घर्षण और पर्यावरण से यादृच्छिक धक्कों से हावी होती है।
संकेतन तालिका
| संकेतन | विवरण |
|---|---|
समस्या परिभाषा और बाधाएँ
मुख्य समस्या सूत्रीकरण और दुविधा
यह पत्र जिस मुख्य समस्या से निपटता है, वह है जटिल गैर-संतुलन प्रणालियों में एन्ट्रॉपी उत्पादन और अंतर्निहित क्षयकारी बल क्षेत्रों का सटीक, स्थानिक-सामयिक स्थानीयकरण, जो सीधे प्रयोगात्मक रूप से मापे गए प्रक्षेपवक्र डेटा से प्राप्त होता है।
इनपुट/वर्तमान स्थिति: इस विश्लेषण का प्रारंभिक बिंदु कच्चा, प्रयोगात्मक रूप से मापने योग्य प्रक्षेपवक्र डेटा, $\mathbf{x}(t)$, है जो थर्मोडायनामिक संतुलन से बहुत दूर संचालित एक प्रणाली का है। एक महत्वपूर्ण पहलू यह है कि यह डेटा सिस्टम के अंतर्निहित गतिशील समीकरणों (जैसे फोकर-प्लैंक या मास्टर समीकरणों) या उनके विश्लेषणात्मक समाधानों, न ही विशिष्ट सिस्टम मापदंडों के पूर्व ज्ञान के बिना उपलब्ध माना जाता है।
आउटपुट/लक्ष्य स्थिति: वांछित अंतिम बिंदु सिस्टम की अपरिवर्तनीयता की एक विस्तृत, स्थानीयकृत समझ है। इसमें शामिल हैं:
1. क्षयकारी (थर्मोडायनामिक) बल क्षेत्र, $F(\mathbf{x},t)$, जो गैर-संतुलन गतिशीलता के पीछे प्रेरक शक्ति है।
2. संबंधित उतार-चढ़ाव वाला एन्ट्रॉपी उत्पादन, $\sigma$, जो व्यक्तिगत प्रक्षेपवक्रों के साथ अंतरिक्ष और समय दोनों में स्थानीयकृत है। यह आउटपुट शोधकर्ताओं को यह पता लगाने की अनुमति देता है कि सिस्टम के भीतर ऊर्जा क्षय कब और कहां होता है।
लुप्त कड़ी और गणितीय अंतर: मौलिक अंतर कच्चे प्रक्षेपवक्र डेटा को इन स्थानीयकृत थर्मोडायनामिक मात्राओं में प्रभावी ढंग से अनुवाद करने में निहित है। ऐतिहासिक रूप से, एन्ट्रॉपी उत्पादन को मापने के तरीके अक्सर सिस्टम के गतिशील समीकरणों के स्पष्ट ज्ञान पर निर्भर करते थे, जो जटिल, उच्च-आयामी, या समय-निर्भर प्रणालियों के लिए आमतौर पर अज्ञात या विश्लेषणात्मक रूप से दुर्गम होते हैं। जबकि औसत एन्ट्रॉपी उत्पादन दरों के वैश्विक अनुमान प्राप्त किए जा सकते हैं, डेटा से ही उतार-चढ़ाव वाले एन्ट्रॉपी उत्पादन और क्षयकारी बल क्षेत्र की स्थानिक-सामयिक संरचना निकालना एक महत्वपूर्ण चुनौती बनी हुई है।
यह पत्र एक भिन्न सिद्धांत के रूप में अल्पकालिक थर्मोडायनामिक अनिश्चितता संबंध (TUR) पर आधारित है। TUR एन्ट्रॉपी उत्पादन दर, $\sigma_{TUR}(t)$ के लिए एक सूत्र प्रदान करता है, जिसे सटीक एन्ट्रॉपी उत्पादन दर $\sigma(t)$ प्राप्त करने के लिए अधिकतम किया जा सकता है। महत्वपूर्ण रूप से, इष्टतम गुणांक क्षेत्र $d^*(\mathbf{x},t)$ जो इस संबंध को अधिकतम करता है, थर्मोडायनामिक बल क्षेत्र $F(\mathbf{x},t)$ के समानुपाती माना जाता है। गणितीय अंतर, तब, इस जटिल, संभावित रूप से गैर-रेखीय, और उच्च-आयामी इष्टतम गुणांक क्षेत्र $d(\mathbf{x},t)$ को सीधे प्रक्षेपवक्र डेटा से प्रभावी ढंग से सीखना है। पत्र डीप न्यूरल नेटवर्क को $d(\mathbf{x},t)$ को पैरामीट्रिज करने और अनुमानित करने के लिए नियोजित करके इसे पाटता है, जिससे क्षयकारी बल क्षेत्र और स्थानीय एन्ट्रॉपी उत्पादन दोनों का पुनर्निर्माण होता है।
दुविधा: ऐतिहासिक रूप से शोधकर्ताओं को फंसाने वाली केंद्रीय दुविधा एन्ट्रॉपी उत्पादन के बारे में उच्च-रिज़ॉल्यूशन, स्थानीयकृत जानकारी की इच्छा और विश्लेषणात्मक सुगमता और कम्प्यूटेशनल स्केलेबिलिटी की व्यावहारिक सीमाओं के बीच दर्दनाक व्यापार-बंद है। पिछले दृष्टिकोण या तो:
* सिस्टम की गतिशीलता के स्पष्ट ज्ञान की आवश्यकता होती है, जो यथार्थवादी जटिल प्रणालियों के लिए शायद ही कभी उपलब्ध होता है।
* केवल वैश्विक, औसत एन्ट्रॉपी उत्पादन दर प्रदान कर सकते थे, इस प्रकार सभी स्थानिक-सामयिक विवरण खो देते थे।
* मात्राओं को स्थानीयकृत करने का प्रयास करने वाली विधियां, जैसे ब्रूट-फोर्स सांख्यिकीय बिनिंग, "उच्च आयामी प्रणालियों के लिए खराब रूप से स्केल करती हैं" (पृष्ठ 3), जिससे वे कई वास्तविक दुनिया के परिदृश्यों के लिए अव्यावहारिक हो जाती हैं।
* अन्य डेटा-संचालित विधियां प्रक्षेपवक्रों के साथ एन्ट्रॉपी उत्पादन का अनुमान लगा सकती हैं लेकिन अक्सर "अंतर्निहित क्षयकारी बल क्षेत्रों की संरचना का अध्ययन नहीं करती हैं" (पृष्ठ 3), जो प्रेरक तंत्र की पूरी समझ के लिए आवश्यक हैं। यह पत्र एक डेटा-संचालित, मॉडल-मुक्त दृष्टिकोण की पेशकश करके इसे दूर करने का लक्ष्य रखता है जो स्थानीयकृत एन्ट्रॉपी उत्पादन और बल क्षेत्र दोनों प्रदान करता है।
बाधाएँ और विफलता मोड
प्रयोगात्मक प्रक्षेपवक्रों से एन्ट्रॉपी उत्पादन को स्थानीयकृत करने की समस्या कई कठोर, यथार्थवादी कारकों द्वारा बाधित होती है जो इसे हल करना बेहद मुश्किल बना देते हैं:
- कम्प्यूटेशनल जटिलता और उच्च आयामीता: वास्तविक दुनिया की गैर-संतुलन प्रणालियां, विशेष रूप से जीव विज्ञान या सक्रिय पदार्थ जैसे क्षेत्रों में, अक्सर कई परस्पर क्रिया करने वाले घटकों को शामिल करती हैं, जिससे उच्च-आयामी चरण स्थान होते हैं। पत्र स्पष्ट रूप से नोट करता है कि "उच्च-आयामी, बहु-निकाय अंतःक्रियाओं की जटिलता पारंपरिक अनुकूलन विधियों के लिए महत्वपूर्ण चुनौतियां पेश करती है" (पृष्ठ 5)। ऐसे विशाल स्थानों में जटिल, गैर-रेखीय बल क्षेत्रों का अनुमान लगाना कम्प्यूटेशनल रूप से गहन है और उन विधियों के लिए जल्दी से दुर्गम हो सकता है जो कुशलता से स्केल नहीं करती हैं।
- ए प्रियोरी गतिशील ज्ञान का अभाव: एक प्रमुख बाधा अधिकांश यथार्थवादी प्रणालियों (पृष्ठ 2) के लिए ज्ञात अंतर्निहित गतिशील समीकरणों (जैसे, फोकर-प्लैंक या मास्टर समीकरणों) या उनके विश्लेषणात्मक समाधानों की अनुपस्थिति है। इसके लिए एक मॉडल-मुक्त अनुमान दृष्टिकोण की आवश्यकता होती है, जो पूर्व-परिभाषित मॉडल के भीतर पैरामीटर अनुमान की तुलना में स्वाभाविक रूप से अधिक चुनौतीपूर्ण है।
- समय-निर्भर गतिशीलता: कई गैर-संतुलन प्रक्रियाएं स्पष्ट रूप से समय-निर्भर होती हैं, जिसका अर्थ है कि थर्मोडायनामिक बल क्षेत्र और एन्ट्रॉपी उत्पादन दर भी समय-परिवर्तनीय मात्राएं हैं। यह अस्थायी निर्भरता "महत्वपूर्ण कम्प्यूटेशनल चुनौतियां पेश करती है, जिससे इन मात्राओं का प्रत्यक्ष अनुमान अत्यधिक गैर-तुच्छ हो जाता है" (पृष्ठ 14)। ऐसे गतिशील परिवर्तनों को सटीक रूप से पकड़ने के लिए मॉडल को प्रशिक्षित करने के लिए मजबूत आर्किटेक्चर और पर्याप्त डेटा की आवश्यकता होती है।
- डेटा गुणवत्ता और सिग्नल-टू-नॉइज़ अनुपात (SNR): प्रयोगात्मक डेटा स्वाभाविक रूप से शोरगुल वाला होता है। एक महत्वपूर्ण बाधा "कमजोर क्षयकारी क्षेत्रों" में उत्पन्न होती है, जहां "अपरिवर्तनीय हस्ताक्षर उतार-चढ़ाव की तुलना में छोटे होते हैं" (पृष्ठ 10)। इन कम-क्षय व्यवस्थाओं में, अनुमान मॉडल को प्रशिक्षित करने के लिए प्रभावी SNR "काफी कम" हो जाता है, जो "व्यापक रूप से अलग एन्ट्रॉपी उत्पादन पैमानों वाले स्वतंत्रता की डिग्री में समान रूप से सामान्यीकृत करने की इसकी क्षमता को सीमित करता है।" जैसा कि चित्र 4(e) में दर्शाया गया है, इससे ऐसे क्षेत्रों में अनुमानित और सैद्धांतिक भविष्यवाणियों के बीच बेमेल हो सकता है।
- प्रायोगिक नमूनाकरण सीमाएँ: प्रयोगात्मक प्रक्षेपवक्रों का नमूना अंतराल, $\Delta t$, "अक्सर व्यावहारिक बाधाओं द्वारा तय किया जाता है" (पृष्ठ 5)। जबकि अल्पकालिक TUR आदर्श रूप से सटीक संतृप्ति के लिए $\Delta t \to 0$ की आवश्यकता होती है, व्यावहारिक $\Delta t$ मान परिमित होते हैं। विधि को इन गैर-आदर्श नमूना दरों को संभालने के लिए पर्याप्त मजबूत होना चाहिए।
- कोर्स-ग्रेनिंग और छिपे हुए स्वतंत्रता की डिग्री: प्रयोगात्मक अवलोकन अक्सर केवल "अंतर्निहित गतिशीलता का एक कम विवरण" प्रदान करते हैं (पृष्ठ 16)। यह "छिपे हुए स्वतंत्रता की डिग्री" (अनदेखे चर) या "परिमित लौकिक रिज़ॉल्यूशन" (सबसैंपलिंग) के कारण हो सकता है। अनुमान विधि को सार्थक परिणाम प्रदान करने में सक्षम होना चाहिए, भले ही देखा गया डेटा कोर्स-ग्रेन किया गया हो, जो समस्या में जटिलता की एक और परत जोड़ता है।
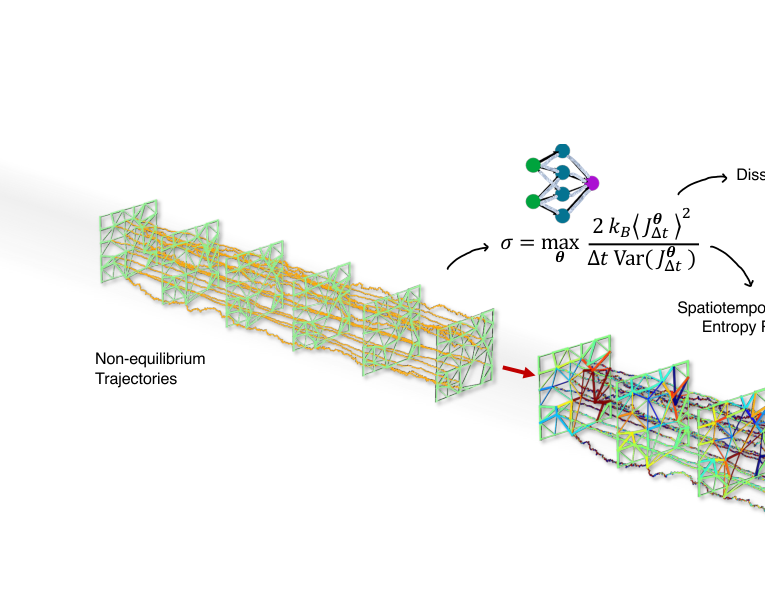 FIG. 1. Schematic of entropy production inference in an active biological network model. Input: The method processes experimentally measurable trajectory data without requiring prior knowledge of system parameters. Outputs: Using short-time Thermodynamic Uncertainty Relations and neural networks (schematically illustrated at the top with a cartoon), we simultaneously infer (i) the dissipative (thermodynamic) force field F (x, t) driving the nonequilibrium dynamics and (ii) the corresponding fluctuating entropy production (color scale: ±0.015kB/s), localized in both space and time. Here, σ denotes the local entropy production rate, and J∆t represents a generalized current in phase space
FIG. 1. Schematic of entropy production inference in an active biological network model. Input: The method processes experimentally measurable trajectory data without requiring prior knowledge of system parameters. Outputs: Using short-time Thermodynamic Uncertainty Relations and neural networks (schematically illustrated at the top with a cartoon), we simultaneously infer (i) the dissipative (thermodynamic) force field F (x, t) driving the nonequilibrium dynamics and (ii) the corresponding fluctuating entropy production (color scale: ±0.015kB/s), localized in both space and time. Here, σ denotes the local entropy production rate, and J∆t represents a generalized current in phase space
यह दृष्टिकोण क्यों
चुनाव की अनिवार्यता
लेखकों की डीप न्यूरल नेटवर्क के साथ अल्पकालिक थर्मोडायनामिक अनिश्चितता संबंध (TUR) आधारित अनुमान योजना को संयोजित करने की पसंद केवल एक मनमानी चयन नहीं थी, बल्कि पारंपरिक दृष्टिकोणों की अंतर्निहित सीमाओं से प्रेरित एक आवश्यक विकास था। जिस क्षण लेखकों को एहसास हुआ कि पारंपरिक "SOTA" विधियां इस विशिष्ट समस्या के लिए अपर्याप्त थीं, वह स्पष्ट रूप से व्यक्त किया गया है जब वे प्रयोगात्मक डेटा से सीधे एन्ट्रॉपी उत्पादन और क्षयकारी बल क्षेत्रों को मापने की चुनौतियों पर चर्चा करते हैं।
जैसा कि पत्र नोट करता है, पारंपरिक दृष्टिकोण "अंतर्निहित गतिशील समीकरणों, जैसे फोकर-प्लैंक और मास्टर समीकरणों, और उनके समाधानों के ज्ञान पर निर्भर करते हैं, जो यथार्थवादी सेटिंग्स में अक्सर अज्ञात होते हैं" (पृष्ठ 2)। ए प्रियोरी सिस्टम गतिशीलता के ज्ञान पर यह मौलिक निर्भरता उन्हें कई यथार्थवादी, जटिल प्रणालियों के लिए अव्यावहारिक बनाती है जहां ऐसे समीकरण या तो प्राप्त करने के लिए बहुत जटिल होते हैं या बस अनुपलब्ध होते हैं। इसके अलावा, जबकि कुछ विधियां औसत एन्ट्रॉपी उत्पादन के वैश्विक अनुमान प्रदान कर सकती हैं, "जटिल प्रक्रियाओं में प्रयोगात्मक डेटा से सीधे इसे [एन्ट्रॉपी उत्पादन] को मापना और स्थानिक-सामयिक रूप से स्थानीयकृत करना" (पृष्ठ 2) की महत्वपूर्ण आवश्यकता एक प्रमुख खुली चुनौती बनी रही। स्थानीयकरण के पिछले प्रयास, जैसे कि ब्रूट-फोर्स सांख्यिकीय बिनिंग दृष्टिकोण [20], "उच्च आयामी प्रणालियों के लिए खराब रूप से स्केल करते हैं" (पृष्ठ 3), स्केलेबिलिटी की कमी का संकेत देते हैं। अन्य विधियां, जैसे [23], प्रक्षेपवक्रों के साथ एन्ट्रॉपी उत्पादन सीखीं लेकिन अंतर्निहित क्षयकारी बल क्षेत्रों को प्रकट करने में विफल रहीं, जो गतिशीलता को समझने के लिए महत्वपूर्ण हैं।
लेखकों ने महसूस किया कि समस्या की जटिलता, विशेष रूप से "उच्च-आयामी, बहु-निकाय अंतःक्रियाओं" में, "पारंपरिक अनुकूलन विधियों के लिए महत्वपूर्ण चुनौतियां पेश करती है" (पृष्ठ 5)। यह महत्वपूर्ण अहसास है: मौजूदा विधियां, चाहे विश्लेषणात्मक हों या सरल सांख्यिकीय तकनीकें, सिस्टम के शासी समीकरणों के पूर्व ज्ञान के बिना डेटा-संचालित, स्केलेबल और उच्च-आयामी तरीके से स्थानीय एन्ट्रॉपी उत्पादन और क्षयकारी बल क्षेत्र दोनों का एक साथ अनुमान नहीं लगा सकती हैं। अल्पकालिक TUR, जो एन्ट्रॉपी उत्पादन दर का एक भिन्न प्रतिनिधित्व प्रदान करता है और इसे सीधे थर्मोडायनामिक बल क्षेत्र (समीकरण 9) से जोड़ता है, ने सैद्धांतिक आधार प्रदान किया। हालांकि, जटिल, उच्च-आयामी प्रणालियों के लिए इस भिन्न समस्या को व्यावहारिक रूप से हल करने के लिए, एक शक्तिशाली फ़ंक्शन सन्निकटनकर्ता अनिवार्य था, जिससे डीप न्यूरल नेटवर्क को अपनाने का सीधा रास्ता मिला।
तुलनात्मक श्रेष्ठता
यह संयुक्त दृष्टिकोण पिछले स्वर्ण मानकों पर भारी गुणात्मक श्रेष्ठता प्रदर्शित करता है, जो सरल प्रदर्शन मेट्रिक्स से कहीं आगे तक फैला हुआ है। संरचनात्मक लाभ अंतर्निहित गतिशील समीकरणों के स्पष्ट ज्ञान के बिना जटिल, उच्च-आयामी और संभावित रूप से समय-निर्भर क्षयकारी बल क्षेत्रों को मॉडल करने की क्षमता में निहित है।
- मॉडल-मुक्त अनुमान: पारंपरिक विधियों के विपरीत, जिन्हें स्पष्ट गतिशील समीकरणों (जैसे, फोकर-प्लैंक या मास्टर समीकरणों) की आवश्यकता होती है, यह ढांचा "प्रक्रिया के स्पष्ट गतिशील विवरणों पर निर्भरता को समाप्त करता है" (पृष्ठ 6)। यह प्रयोगात्मक डेटा के लिए एक गहरा लाभ है जहां ऐसे समीकरण अक्सर दुर्गम या अज्ञात होते हैं।
- उच्च आयामों तक स्केलेबिलिटी: एन्ट्रॉपी उत्पादन को स्थानीयकृत करने के पिछले प्रयास, जैसे ब्रूट-फोर्स बिनिंग [20], "उच्च आयामी प्रणालियों के लिए खराब रूप से स्केल करते हैं" (पृष्ठ 3)। डीप न्यूरल नेटवर्क का लाभ उठाकर, जो "जटिल, उच्च-आयामी कार्यों का अनुमान लगाने में उत्कृष्ट हैं" (पृष्ठ 5), प्रस्तावित विधि "विभिन्न एन्ट्रॉपी उत्पादन पैमानों के साथ प्रणालियों में एन्ट्रॉपी उत्पादन का विश्लेषण करने के लिए एक स्केलेबल समाधान" (पृष्ठ 6) प्रदान करती है। यह उच्च-आयामी शोर और जटिल अंतःक्रियाओं की चुनौती को सीधे संबोधित करता है।
- क्षयकारी बलों का स्थानिक-सामयिक स्थानीयकरण: विधि न केवल वैश्विक एन्ट्रॉपी उत्पादन दर का अनुमान लगाती है, बल्कि महत्वपूर्ण रूप से, "उच्च-आयामी, संभावित रूप से समय-निर्भर क्षयकारी बल क्षेत्रों" का पुनर्निर्माण करती है और "गैर-संतुलन प्रक्षेपवक्रों के साथ अंतरिक्ष और समय दोनों में उतार-चढ़ाव वाले एन्ट्रॉपी उत्पादन" को स्थानीयकृत करती है (पृष्ठ 2)। यह अपरिवर्तनीयता की एक दानेदार, भौतिक रूप से व्याख्यात्मक समझ प्रदान करता है, जो पहले के वैश्विक अनुमान तकनीकों से काफी हद तक गायब थी।
- समय-निर्भर प्रणालियों के लिए लौकिक चिकनाई और सामान्यीकरण: समय-निर्भर गतिशीलता के लिए, तंत्रिका नेटवर्क को समय को इनपुट के रूप में लेने के लिए बढ़ाया जाता है। यह "साझा नेटवर्क मापदंडों के माध्यम से लौकिक चिकनाई को लागू करता है, अनदेखे समयों तक सामान्यीकरण को सक्षम बनाता है, और पूरे समय डोमेन में डेटा का कुशलतापूर्वक लाभ उठाता है" (पृष्ठ 6-7)। यह प्रत्येक असतत समय बिंदु के लिए अलग-अलग मॉडल को प्रशिक्षित करने की तुलना में एक महत्वपूर्ण गुणात्मक सुधार है, जो कम्प्यूटेशनल रूप से महंगा और ओवरफिटिंग के लिए प्रवण होगा।
- मजबूती और व्यापक प्रयोज्यता: विधि "व्यापक हाइपरपैरामीटर ट्यूनिंग के बिना सभी उदाहरणों में मजबूती से प्रदर्शन करने वाले एकल तंत्रिका नेटवर्क आर्किटेक्चर पर निर्भर करती है, जिससे यह व्यवहार में व्यापक रूप से लागू होती है" (पृष्ठ 4)। यह एक मजबूत और सामान्यीकृत ढांचा इंगित करता है, जो विभिन्न प्रणालियों (स्थिर, गैर-स्थिर, रैखिक, गैर-रेखीय, निम्न- और उच्च-आयामी) को संभालने में सक्षम है जैसा कि परिणामों में प्रदर्शित किया गया है।
बाधाओं के साथ संरेखण
चुनी गई विधि समस्या की अंतर्निहित और स्पष्ट बाधाओं के साथ पूरी तरह से संरेखित होती है, जो "कठोर आवश्यकताओं और समाधान के अद्वितीय गुणों के बीच एक 'विवाह' बनाती है।"
- डेटा-संचालित आवश्यकता: प्राथमिक बाधा "सिस्टम मापदंडों" या "अंतर्निहित गतिशील समीकरणों" के पूर्व ज्ञान की आवश्यकता के बिना "सीधे प्रयोगात्मक डेटा से" एन्ट्रॉपी उत्पादन का अनुमान लगाना है (पृष्ठ 2, चित्र 1)। अल्पकालिक TUR को तंत्रिका नेटवर्क के साथ जोड़ना स्वाभाविक रूप से डेटा-संचालित है। यह इनपुट के रूप में "प्रयोगात्मक रूप से मापने योग्य प्रक्षेपवक्र डेटा" लेता है और इससे बल क्षेत्र और एन्ट्रॉपी उत्पादन सीखता है, स्पष्ट मॉडल समीकरणों की आवश्यकता को दरकिनार करता है।
- स्थानिक-सामयिक स्थानीयकरण: मुख्य समस्या "जटिल प्रक्रियाओं में [एन्ट्रॉपी उत्पादन] को मापना और स्थानिक-सामयिक रूप से स्थानीयकृत करना" है (पृष्ठ 2)। विधि सीधे इसे "क्षयकारी (थर्मोडायनामिक) बल क्षेत्र F(x,t)" और "संबंधित उतार-चढ़ाव वाले एन्ट्रॉपी उत्पादन... अंतरिक्ष और समय दोनों में स्थानीयकृत" (चित्र 1, पृष्ठ 3) का अनुमान लगाकर संबोधित करती है। TUR के भिन्न सिद्धांत, जब तंत्रिका नेटवर्क द्वारा अनुकूलित किया जाता है, तो बल क्षेत्र $F(x,t)$ प्राप्त होता है, जो प्रक्षेपवक्र वृद्धि के साथ संकुचित होने पर, स्थानीय एन्ट्रॉपी उत्पादन $dS(t) = F(x(t), t) \circ dx(t)$ (समीकरण 7) देता है।
- उच्च आयामीता और जटिलता को संभालना: समस्या में "जटिल प्रक्रियाएं" और "उच्च-आयामी, बहु-निकाय अंतःक्रियाएं" शामिल हैं (पृष्ठ 2, 5)। डीप न्यूरल नेटवर्क विशेष रूप से चुने जाते हैं क्योंकि वे "जटिल, उच्च-आयामी कार्यों का अनुमान लगाने में उत्कृष्ट हैं" (पृष्ठ 5), जिससे मॉडल बल क्षेत्र की जटिल, गैर-रेखीय निर्भरताओं को उच्च-आयामी चरण स्थानों में पकड़ सकता है, एक ऐसा कार्य जहां पारंपरिक विधियां खराब स्केलिंग के कारण विफल रहीं।
- गैर-संतुलन गतिशीलता (स्थिर और समय-निर्भर): विधि "संतुलन से दूर संचालित प्रणालियों" (पृष्ठ 2) के लिए डिज़ाइन की गई है। अल्पकालिक TUR को स्थिर और समय-निर्भर दोनों मामलों [21, 22] के लिए मान्य दिखाया गया है। तंत्रिका नेटवर्क आर्किटेक्चर को गैर-स्थिर प्रक्रियाओं के लिए समय को एक अतिरिक्त इनपुट के रूप में शामिल करने के लिए अनुकूलित किया गया है, जिससे विभिन्न गैर-संतुलन परिदृश्यों में इसकी प्रयोज्यता सुनिश्चित होती है।
- प्रायोगिक डेटा से मजबूती: ढांचा "प्रयोगात्मक रूप से सुलभ अवलोकन" (पृष्ठ 2) से मजबूत अनुमान का लक्ष्य रखता है। "व्यापक हाइपरपैरामीटर ट्यूनिंग के बिना" (पृष्ठ 4) एक एकल, मजबूत तंत्रिका नेटवर्क आर्किटेक्चर का उपयोग इसे व्यावहारिक और व्यापक रूप से लागू करने योग्य बनाता है, जटिल मॉडल से जुड़ी नाजुकता को कम करता है और वास्तविक दुनिया के प्रयोगात्मक शोर के साथ भी विश्वसनीय परिणाम सुनिश्चित करता है।
विकल्पों का अस्वीकरण
पत्र स्पष्ट रूप से और अंतर्निहित रूप से कई वैकल्पिक दृष्टिकोणों को अस्वीकार करता है, जो समस्या के संदर्भ में उनकी सीमाओं को उजागर करता है।
- पारंपरिक विश्लेषणात्मक/समीकरण-आधारित विधियां: सबसे महत्वपूर्ण अस्वीकृति उन विधियों की है जो "अंतर्निहित गतिशील समीकरणों, जैसे फोकर-प्लैंक और मास्टर समीकरणों, और उनके समाधानों के ज्ञान पर निर्भर करती हैं" (पृष्ठ 2)। इन्हें अपर्याप्त माना जाता है क्योंकि ऐसा ज्ञान "यथार्थवादी सेटिंग्स में अक्सर अज्ञात होता है" और केवल "सीमित संख्या में विश्लेषणात्मक रूप से सुलभ मामलों" के लिए उपलब्ध होता है (पृष्ठ 2, 5)। प्रस्तावित डेटा-संचालित, मॉडल-मुक्त दृष्टिकोण सीधे इस मौलिक सीमा को दूर करता है।
- वैश्विक एन्ट्रॉपी उत्पादन अनुमानक: कई मौजूदा विधियां, जिनमें हाराडा-सासा समानता [6], स्थिर-अवस्था वर्तमान/संभाव्यता वितरण विधियां [5], समय-अपरिवर्तनीयता माप [26-31], पथ संभाव्यता अनुमानक [4, 32, 33], और विचरण योग नियम (VSR) [13] शामिल हैं, मुख्य रूप से "औसत एन्ट्रॉपी उत्पादन दर के वैश्विक अनुमान प्राप्त करने" पर ध्यान केंद्रित करते हैं (पृष्ठ 3)। जबकि मूल्यवान, ये विधियां एन्ट्रॉपी उत्पादन और अंतर्निहित क्षयकारी बल क्षेत्रों के वांछित "स्थानिक-सामयिक स्थानीयकरण" प्रदान करने में विफल रहती हैं, जो इस कार्य का केंद्रीय लक्ष्य है।
- ब्रूट-फोर्स सांख्यिकीय बिनिंग: पत्र विशेष रूप से उल्लेख करता है कि थर्मोडायनामिक बल क्षेत्र का अनुमान लगाने के लिए विकसित ब्रूट-फोर्स सांख्यिकीय बिनिंग दृष्टिकोण [20] "उच्च आयामी प्रणालियों के लिए खराब रूप से स्केल करता है" (पृष्ठ 3)। यह एक स्केलेबिलिटी समस्या को उजागर करता है जो इसे उन जटिल, उच्च-आयामी प्रणालियों के लिए अनुपयुक्त बनाती है जिनका लेखक विश्लेषण करना चाहते हैं। तंत्रिका नेटवर्क दृष्टिकोण, इसके विपरीत, ऐसी जटिलता को कुशलतापूर्वक संभालने के लिए डिज़ाइन किया गया है।
- आंशिक अनुमान विधियां: [23] जैसे दृष्टिकोण, जो सीधे प्रक्षेपवक्रों के साथ एन्ट्रॉपी उत्पादन सीखते हैं, "अंतर्निहित क्षयकारी बल क्षेत्रों की संरचना का अध्ययन नहीं करने" के लिए नोट किए जाते हैं (पृष्ठ 3)। इसी तरह, विधियां जो केवल "एक क्षयकारी बल क्षेत्र के हिस्से का अनुमान लगाती हैं... यह मानते हुए कि शेष घटक पहले से ज्ञात हैं" [11, 40] पूर्ण, मॉडल-मुक्त समझ के लिए अपर्याप्त हैं। प्रस्तावित विधि का लक्ष्य पूरे क्षयकारी बल क्षेत्र का पूर्ण अनुमान लगाना है।
- अन्य मशीन लर्निंग मॉडल (अंतर्निहित): जबकि स्पष्ट रूप से अन्य एमएल मॉडल जैसे GANs या बुनियादी ट्रांसफार्मर को अस्वीकार नहीं किया गया है, डीप न्यूरल नेटवर्क आर्किटेक्चर की पसंद, विशेष रूप से डीप-रिट्ज़ प्रेरित मॉडल, "जटिल, उच्च-आयामी कार्यों का अनुमान लगाने में उत्कृष्ट" होने की इसकी सिद्ध क्षमता और "इष्टतम-नियंत्रण तकनीकों" और "दुर्लभ घटनाओं को कुशलतापूर्वक नमूना" [52, 53] (पृष्ठ 5) में इसकी सफलता के कारण प्रेरित है। यह बताता है कि सरल या कम विशिष्ट एमएल आर्किटेक्चर इस विशिष्ट भिन्न अनुकूलन समस्या के लिए पैरामीटर स्थान का पता लगाने में समान स्तर की लचीलापन, मजबूती या दक्षता प्रदान नहीं कर सकते हैं, खासकर उच्च-आयामी बल क्षेत्रों के सटीक पुनर्निर्माण की आवश्यकता को देखते हुए। चुने गए नेटवर्क की योगात्मक संरचना भी "परतों के पार जानकारी को संरक्षित करने में मदद करती है और प्रशिक्षण को स्थिर करती है" (पृष्ठ 5), जो संभावित रूप से कम स्थिर विकल्पों पर एक विचारित विकल्प का सुझाव देती है।
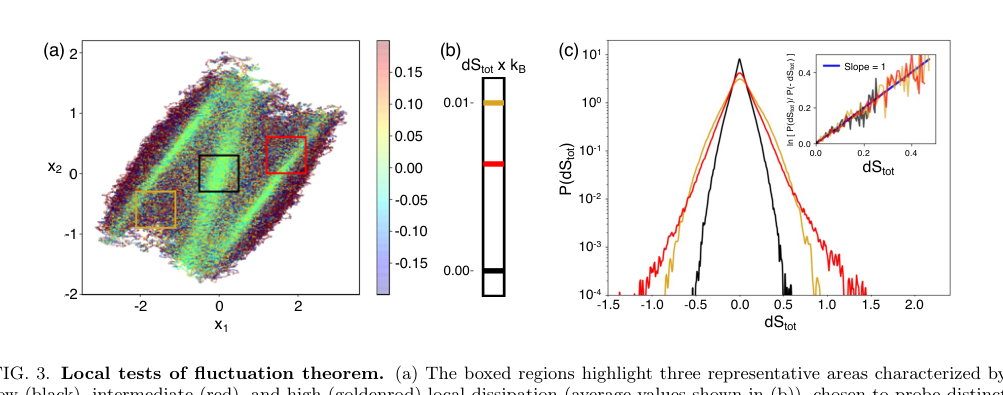 FIG. 3. Local tests of fluctuation theorem. (a) The boxed regions highlight three representative areas characterized by low (black), intermediate (red), and high (goldenrod) local dissipation (average values shown in (b)), chosen to probe distinct dynamical environments. (c) Probability distributions P(dStot) conditioned on these regions, illustrating pronounced region- dependent differences in the statistics of entropy production. The low-dissipation region exhibit narrow, nearly symmetric distributions, while higher-dissipation regions display broader, strongly skewed distributions with extended tails. The inset shows the corresponding fluctuation ratios ln[P(dStot)/P(−dStot)] as a function of dStot, demonstrating that each region independently satisfies a local fluctuation theorem with unit slope
FIG. 3. Local tests of fluctuation theorem. (a) The boxed regions highlight three representative areas characterized by low (black), intermediate (red), and high (goldenrod) local dissipation (average values shown in (b)), chosen to probe distinct dynamical environments. (c) Probability distributions P(dStot) conditioned on these regions, illustrating pronounced region- dependent differences in the statistics of entropy production. The low-dissipation region exhibit narrow, nearly symmetric distributions, while higher-dissipation regions display broader, strongly skewed distributions with extended tails. The inset shows the corresponding fluctuation ratios ln[P(dStot)/P(−dStot)] as a function of dStot, demonstrating that each region independently satisfies a local fluctuation theorem with unit slope
गणितीय और तार्किक तंत्र
मास्टर समीकरण
इस पत्र के एन्ट्रॉपी उत्पादन को स्थानीयकृत करने के दृष्टिकोण के मूल में एक भिन्न प्रतिनिधित्व है, जो अल्पकालिक थर्मोडायनामिक अनिश्चितता संबंध (TUR) से प्राप्त होता है। स्थिर गैर-संतुलन प्रक्रियाओं के लिए, वह उद्देश्य फ़ंक्शन जिसे मॉडल प्रशिक्षण के दौरान अधिकतम करने का प्रयास करता है, इस प्रकार दिया गया है:
$$ f(\theta)_{\text{train}} = \frac{2k_B \langle J_{\Delta t}^\theta \rangle^2}{\Delta t \text{Var}(J_{\Delta t}^\theta)} $$
समय-निर्भर गतिशीलता के लिए, इस उद्देश्य को नमूना समय बिंदुओं $\{t_k\}$ के मिनी-बैच पर एकत्रित करने के लिए बढ़ाया जाता है:
$$ f(\theta) = \sum_{k=1}^{\text{batch\_size}} \frac{2k_B \langle J_{\Delta t,k}^\theta \rangle^2}{\Delta t \text{Var}(J_{\Delta t,k}^\theta)} $$
यह समीकरण, संक्षेप में, एक "सामान्यीकृत" वर्तमान के औसत प्रवाह को उसके उतार-चढ़ाव से संबंधित करके एक प्रणाली की अपरिवर्तनीय प्रक्रियाओं की दक्षता को मापता है। इस मात्रा का अधिकतमकरण अंतर्निहित क्षयकारी बल क्षेत्र और, परिणामस्वरूप, स्थानीय एन्ट्रॉपी उत्पादन के अनुमान की अनुमति देता है।
पद-दर-पद विच्छेदन
आइए स्थिर प्रक्रियाओं के लिए प्राथमिक उद्देश्य फ़ंक्शन, $f(\theta)_{\text{train}}$ को प्रत्येक घटक को समझने के लिए अलग करें:
-
$f(\theta)_{\text{train}}$:
1) गणितीय परिभाषा: यह उद्देश्य फ़ंक्शन है जिसे सीखने का एल्गोरिथम प्रशिक्षण चरण के दौरान अधिकतम करने का लक्ष्य रखता है। यह अनुमानित एन्ट्रॉपी उत्पादन दर का प्रतिनिधित्व करने वाला एक स्केलर मान है।
2) भौतिक/तार्किक भूमिका: इसका मान सीधे मॉडल मापदंडों $\theta$ के दिए गए सेट के लिए अनुमानित एन्ट्रॉपी उत्पादन दर से मेल खाता है। अनुकूलन का लक्ष्य $\theta$ खोजना है जो अधिकतम संभव मान देता है, जो TUR के अनुसार, वास्तविक एन्ट्रॉपी उत्पादन दर के अनुरूप होता है।
3) यह रूप क्यों: यह अल्पकालिक TUR से प्राप्त मात्रा है जिसे एन्ट्रॉपी उत्पादन का अनुमान लगाने के लिए अधिकतम किया जाता है। -
$k_B$:
1) गणितीय परिभाषा: बोल्ट्ज़मान स्थिरांक। पत्र सरलीकरण के लिए स्पष्ट रूप से कहता है कि $k_B = 1$।
2) भौतिक/तार्किक भूमिका: एक मौलिक भौतिक स्थिरांक जो तापीय उतार-चढ़ाव के लिए प्राकृतिक ऊर्जा पैमाना प्रदान करता है और तापमान को ऊर्जा से जोड़ता है। इस संदर्भ में, यह एन्ट्रॉपी उत्पादन की इकाइयों को सुसंगत सुनिश्चित करता है (जैसे, $k_B/s$ की इकाइयों में)। इसे 1 पर सेट करने से प्रभावी रूप से एन्ट्रॉपी को $k_B$ की इकाइयों में सामान्यीकृत किया जाता है।
3) यह रूप क्यों: यह एक स्थिरांक स्केलिंग कारक है, एक ऑपरेटर नहीं। -
$\langle J_{\Delta t}^\theta \rangle$:
1) गणितीय परिभाषा: यह सामान्यीकृत वर्तमान $J_{\Delta t}^\theta$ के एनसेंबल औसत (या अपेक्षा मूल्य) को दर्शाता है। सामान्यीकृत वर्तमान स्वयं $J_{\Delta t}^\theta = d(x_{t+\Delta t/2}; \theta) \circ (x_{t+\Delta t} - x_t)$ के रूप में परिभाषित किया गया है, जहां $d(x; \theta)$ पैरामीट्रिज्ड क्षयकारी बल क्षेत्र है और $\circ$ स्ट्रैटोनोविच उत्पाद को दर्शाता है।
2) भौतिक/तार्किक भूमिका: यह शब्द अल्पकालिक $\Delta t$ पर अनुमानित बल क्षेत्र $d(x; \theta)$ द्वारा निर्देशित चरण स्थान में औसत "प्रवाह" या "ड्रिफ्ट" का प्रतिनिधित्व करता है। एक गैर-शून्य औसत वर्तमान थर्मोडायनामिक संतुलन से बाहर संचालित होने वाली प्रणाली का एक प्रत्यक्ष संकेतक है और यह ऊर्जा क्षय से स्वाभाविक रूप से जुड़ा हुआ है।
3) कोण कोष्ठक क्यों: कोण कोष्ठक $\langle \dots \rangle$ एक एनसेंबल औसत के लिए मानक संकेतन हैं, जिसमें वर्तमान की सभी संभावित वास्तविकताओं पर उनके संभाव्यता द्वारा भारित योग या एकीकरण शामिल है। यह एक सांख्यिकीय रूप से मजबूत औसत मान प्राप्त करने के लिए आवश्यक है। -
$(\dots)^2$:
1) गणितीय परिभाषा: यह ऑपरेशन सामान्यीकृत वर्तमान के एनसेंबल औसत को वर्ग करता है।
2) भौतिक/तार्किक भूमिका: वर्ग करना सुनिश्चित करता है कि उद्देश्य फ़ंक्शन में औसत वर्तमान का योगदान हमेशा सकारात्मक हो, वर्तमान की दिशा की परवाह किए बिना। इससे भी महत्वपूर्ण बात यह है कि यह बड़े औसत धाराओं पर एक द्विघात जोर देता है, जो संतुलन से आगे संचालित होने वाली प्रणालियों की विशेषता है और इस प्रकार अधिक एन्ट्रॉपी का उत्पादन करती है।
3) वर्ग क्यों: TUR का गणितीय रूप न्यूमरेटर में एक वर्ग औसत वर्तमान को निर्धारित करता है, जो औसत वर्तमान पर द्विघात निर्भरता को दर्शाता है। -
$\Delta t$:
1) गणितीय परिभाषा: यह सिस्टम की प्रक्षेपवक्र को रिकॉर्ड करने के लिए उपयोग किया जाने वाला असतत नमूना अंतराल या चरण आकार है।
2) भौतिक/तार्किक भूमिका: यह वह छोटी अवधि का प्रतिनिधित्व करता है जिसके लिए सामान्यीकृत वर्तमान की गणना की जाती है। "अल्पकालिक" सीमा TUR के लिए एन्ट्रॉपी उत्पादन दर का सटीक अनुमान प्रदान करने के लिए महत्वपूर्ण है। हर में, यह एक स्केलिंग कारक के रूप में कार्य करता है, जो $\Delta t$ पर संचित कुल वर्तमान को प्रति इकाई समय दर में बदलता है।
3) विभाजन क्यों: $\Delta t$ से विभाजन संचित कुल वर्तमान को दर में बदल देता है, जो एन्ट्रॉपी उत्पादन दर की परिभाषा के अनुरूप है। -
$\text{Var}(J_{\Delta t}^\theta)$:
1) गणितीय परिभाषा: यह सामान्यीकृत वर्तमान $J_{\Delta t}^\theta$ का विचरण है, जिसे $\text{Var}(X) = \langle X^2 \rangle - \langle X \rangle^2$ के रूप में परिभाषित किया गया है।
2) भौतिक/तार्किक भूमिका: यह शब्द औसत सामान्यीकृत वर्तमान के आसपास उतार-चढ़ाव या अनिश्चितता को मापता है। TUR के संदर्भ में, एक दिए गए औसत वर्तमान के लिए एक छोटा विचरण एक अधिक "निश्चित" या कम शोर वाली प्रक्रिया का अर्थ है, जिससे उच्च अनुमानित एन्ट्रॉपी उत्पादन दर होती है। यह अत्यधिक उतार-चढ़ाव के लिए एक दंड के रूप में कार्य करता है, क्योंकि उच्च अनिश्चितता एन्ट्रॉपी उत्पादन अनुमान को कम विश्वसनीय बना देगी।
3) हर में क्यों: TUR वर्तमान के सापेक्ष उतार-चढ़ाव और एन्ट्रॉपी उत्पादन के बीच एक व्युत्क्रम संबंध स्थापित करता है। हर में विचरण रखने से यह मौलिक सीमा दर्शाती है। -
$\max_{\theta}$:
1) गणितीय परिभाषा: यह अधिकतमकरण ऑपरेटर है, जो इंगित करता है कि उद्देश्य फ़ंक्शन $f(\theta)_{\text{train}}$ को मापदंडों $\theta$ के सेट के संबंध में अनुकूलित किया गया है।
2) भौतिक/तार्किक भूमिका: यह अनुमान योजना का केंद्रीय तंत्र है। एल्गोरिथम उन मापदंडों $\theta$ के विशिष्ट सेट (जो क्षयकारी बल क्षेत्र $d(x;\theta)$ को परिभाषित करते हैं) की सक्रिय रूप से खोज करता है जो उद्देश्य फ़ंक्शन के अनुपात को अधिकतम करता है। TUR में निहित यह अधिकतमकरण सिद्धांत, मॉडल को उस "इष्टतम" बल क्षेत्र की पहचान करने में सक्षम बनाता है जो सिस्टम की गैर-संतुलन गतिशीलता और इसके संबंधित एन्ट्रॉपी उत्पादन का सबसे सटीक रूप से वर्णन करता है।
3) अधिकतमीकरण क्यों: TUR एन्ट्रॉपी उत्पादन के लिए एक निचली सीमा प्रदान करता है। इस विशिष्ट अनुपात को अधिकतम करके, विधि उस वर्तमान को खोजने का लक्ष्य रखती है जो इस सीमा को संतृप्त करता है, जिससे सटीक एन्ट्रॉपी उत्पादन दर प्राप्त होती है।
चरण-दर-चरण प्रवाह
एक एकल, अमूर्त डेटा बिंदु की कल्पना करें, जो इस संदर्भ में एक कण की प्रक्षेपवक्र का एक छोटा खंड है, जो गणितीय इंजन से गुजर रहा है:
- प्रक्षेपवक्र खंड इनपुट: प्रक्रिया एक इनपुट के साथ शुरू होती है: एक कण की दो लगातार स्थितियां, $x_t$ और $x_{t+\Delta t}$, एक लंबी गैर-संतुलन प्रक्षेपवक्र से नमूना की गई। यह समय $t$ पर कण की स्थिति और थोड़ी देर $\Delta t$ बाद का प्रतिनिधित्व करता है।
- मध्यबिंदु गणना: सबसे पहले, सिस्टम इस खंड के मध्यबिंदु की गणना करता है, $x_{\text{mid}} = (x_t + x_{t+\Delta t})/2$ । यह मध्यबिंदु अंतराल के लिए एक प्रतिनिधि स्थिति के रूप में कार्य करता है।
- विस्थापन गणना: साथ ही, इस खंड के लिए विस्थापन वेक्टर की गणना की जाती है: $\Delta x = x_{t+\Delta t} - x_t$ । यह वेक्टर इंगित करता है कि कण कितना और किस दिशा में चला।
- बल क्षेत्र अनुमान (तंत्रिका नेटवर्क फॉरवर्ड पास): गणना किया गया मध्यबिंदु $x_{\text{mid}}$ फिर तंत्रिका नेटवर्क में फीड किया जाता है, जो पैरामीट्रिज्ड क्षयकारी बल क्षेत्र $d(x; \theta)$ का प्रतिनिधित्व करता है। अपने वर्तमान आंतरिक भार और पूर्वाग्रहों (मापदंडों $\theta$) का उपयोग करके, नेटवर्क एक फॉरवर्ड पास करता है, $x_{\text{mid}}$ को आउटपुट वेक्टर $d(x_{\text{mid}}; \theta)$ में बदलता है। यह आउटपुट उस स्थिति और समय पर कार्य करने वाले थर्मोडायनामिक बल का मॉडल का वर्तमान अनुमान है।
- सामान्यीकृत वर्तमान गणना: अनुमानित बल क्षेत्र $d(x_{\text{mid}}; \theta)$ को फिर स्ट्रैटोनोविच उत्पाद (इस संदर्भ के लिए प्रभावी रूप से एक डॉट उत्पाद) का उपयोग करके विस्थापन $\Delta x$ के साथ जोड़ा जाता है ताकि इस विशिष्ट खंड के लिए सामान्यीकृत वर्तमान की गणना की जा सके: $J_{\Delta t}^\theta = d(x_{\text{mid}}; \theta) \cdot \Delta x$ । यह मान कण के पथ के साथ अनुमानित बल द्वारा किए गए "कार्य" को मापता है।
- बैच संचय: यह पूरी अनुक्रम (चरण 1-5) कई ऐसे प्रक्षेपवक्र खंडों के लिए दोहराई जाती है, जो $J_{\Delta t}^\theta$ मानों का एक "बैच" बनाते हैं।
- सांख्यिकीय एकत्रीकरण: एक बार $J_{\Delta t}^\theta$ मानों का एक बैच जमा हो जाने के बाद, सिस्टम उनके एनसेंबल माध्य $\langle J_{\Delta t}^\theta \rangle$ और उनके विचरण $\text{Var}(J_{\Delta t}^\theta)$ की गणना करता है। ये सांख्यिकीय माप बैच में औसत प्रवाह और उसके उतार-चढ़ाव को सारांशित करते हैं।
- उद्देश्य फ़ंक्शन मूल्यांकन: अंत में, इन गणना किए गए माध्य और विचरण मानों को मास्टर समीकरण (जैसे, $f(\theta)_{\text{train}}$) में प्लग किया जाता है ताकि एक एकल स्केलर मान की गणना की जा सके। यह मान इंगित करता है कि वर्तमान बल क्षेत्र पैरामीटर $\theta$ TUR के अनुसार एन्ट्रॉपी उत्पादन दर का अनुमान लगाने में कितनी अच्छी तरह प्रदर्शन कर रहे हैं। यह मूल्यांकन के लिए एक पूर्ण पास के लिए एक पूर्ण पास पूरा करता है।
अनुकूलन गतिशीलता
तंत्र पुनरावृत्त रूप से ग्रेडिएंट आरोहण की एक प्रक्रिया के माध्यम से तंत्रिका नेटवर्क के आंतरिक मापदंडों $\theta$ को परिष्कृत करके सीखता है और अभिसरण करता है, जिसका उद्देश्य उद्देश्य फ़ंक्शन $f(\theta)_{\text{train}}$ (या समय-निर्भर मामलों के लिए $f(\theta)$) को अधिकतम करना है।
-
हानि परिदृश्य: उद्देश्य फ़ंक्शन $f(\theta)$ नेटवर्क के मापदंडों $\theta$ के उच्च-आयामी स्थान में एक जटिल "हानि परिदृश्य" को परिभाषित करता है। कई मशीन लर्निंग कार्यों के विपरीत जो एक हानि फ़ंक्शन को कम करते हैं, यहां लक्ष्य इस परिदृश्य के शिखर (ओं) को खोजना है, क्योंकि $f(\theta)$ का उच्च मान एन्ट्रॉपी उत्पादन के अधिक सटीक अनुमान का अर्थ है। डीप न्यूरल नेटवर्क की गैर-रेखीय प्रकृति और सांख्यिकीय संचालन (माध्य और विचरण) इस परिदृश्य को जटिल बनाते हैं।
-
ग्रेडिएंट आरोहण: प्रशिक्षण प्रक्रिया के प्रत्येक चरण में, एल्गोरिथम उद्देश्य फ़ंक्शन के ग्रेडिएंट की गणना $\theta$ के संबंध में प्रत्येक पैरामीटर के लिए करता है, अर्थात, $\nabla_\theta f(\theta)_{\text{train}}$ । यह ग्रेडिएंट वेक्टर हानि परिदृश्य पर उद्देश्य फ़ंक्शन की सबसे खड़ी वृद्धि की दिशा में इंगित करता है।
-
पैरामीटर अद्यतन: मापदंडों $\theta$ को फिर इस सकारात्मक ग्रेडिएंट की दिशा में एक कदम उठाकर अद्यतन किया जाता है। इस कदम का आकार "सीखने की दर" हाइपरपैरामीटर (lr) द्वारा नियंत्रित होता है। अद्यतन नियम आमतौर पर होता है:
$$ \theta_{\text{new}} = \theta_{\text{old}} + \text{lr} \cdot \nabla_\theta f(\theta)_{\text{train}} $$
यह पुनरावृत्त समायोजन धीरे-धीरे मापदंडों को एक ऐसे विन्यास की ओर ले जाता है जो उद्देश्य फ़ंक्शन को अधिकतम करता है, इस प्रकार वास्तविक थर्मोडायनामिक बल क्षेत्र के अनुमान में सुधार करता है। -
अभिसरण और सामान्यीकरण:
- अभिसरण: प्रशिक्षण लूप जारी रहता है, प्रत्येक पुनरावृत्ति में मापदंडों को अद्यतन किया जाता है। जैसे-जैसे मापदंडों $\theta$ को परिष्कृत किया जाता है, अनुमानित बल क्षेत्र $d(x;\theta)$ वास्तविक क्षयकारी बल क्षेत्र $F(x,t)$ के तेजी से बेहतर प्रतिनिधित्व बन जाता है। इससे उद्देश्य फ़ंक्शन के मान में वृद्धि होती है, जो इंगित करता है कि मॉडल एन्ट्रॉपी उत्पादन दर के अधिक सटीक अनुमान की ओर अभिसरण कर रहा है।
- ओवरफिटिंग प्रबंधन: अनुकूलन का एक महत्वपूर्ण पहलू ओवरफिटिंग को रोकना है, खासकर सीमित डेटा के साथ। पत्र नोट करता है कि कभी-कभी एक मध्यवर्ती मापदंडों का सेट अंतिम, पूरी तरह से अभिसरण मॉडल की तुलना में अनदेखे डेटा पर बेहतर प्रदर्शन कर सकता है। इसे संबोधित करने के लिए, एल्गोरिथम प्रशिक्षण के दौरान सभी संग्रहीत मध्यवर्ती पैरामीटर सेट $\{\theta_m\}$ को संग्रहीत करता है। मुख्य प्रशिक्षण लूप के बाद, इन सभी संग्रहीत मॉडलों का मूल्यांकन एक अलग, अलग सत्यापन डेटा सेट पर किया जाता है। अंतिम इष्टतम मापदंडों $\theta^*$ को उन लोगों के रूप में चुना जाता है जो इस सत्यापन सेट पर उच्चतम उद्देश्य फ़ंक्शन मान प्राप्त करते हैं, यह सुनिश्चित करते हुए कि मॉडल प्रशिक्षण डेटा से परे अच्छी तरह से सामान्यीकृत होता है। बड़े डेटासेट के लिए, लेखक अवलोकन करते हैं कि ओवरफिटिंग नगण्य हो जाती है, और प्रशिक्षण-इष्टतम मॉडल सत्यापन डेटा पर भी इष्टतम प्रदर्शन करता है।
-
समय-निर्भर विस्तार: समय-निर्भर गतिशीलता वाली प्रणालियों के लिए, तंत्रिका नेटवर्क को समय $t$ को एक अतिरिक्त इनपुट के रूप में स्वीकार करने के लिए डिज़ाइन किया गया है। उद्देश्य फ़ंक्शन (समीकरण 17) को फिर नमूना समय बिंदुओं के मिनी-बैच पर औसत करके गणना की जाती है। यह सूत्रीकरण नेटवर्क को साझा नेटवर्क मापदंडों के माध्यम से लौकिक चिकनाई को लागू करते हुए समय-परिवर्तनीय बल क्षेत्र को सीखने की अनुमति देता है, जिससे अनदेखे समयों तक सामान्यीकरण और पूरे समय डोमेन में कुशल डेटा उपयोग सक्षम होता है। $\theta$ को अद्यतन करने के लिए अंतर्निहित ग्रेडिएंट आरोहण तंत्र समान रहता है, लेकिन यह अब इस समय-एकत्रित उद्देश्य पर संचालित होता है। यह पुनरावृत्त प्रक्रिया सुनिश्चित करती है कि तंत्र प्रभावी ढंग से सीखता है कि एन्ट्रॉपी उत्पादन कैसे होता है और सिस्टम की स्थिति समय के साथ कैसे अपडेट होती है।
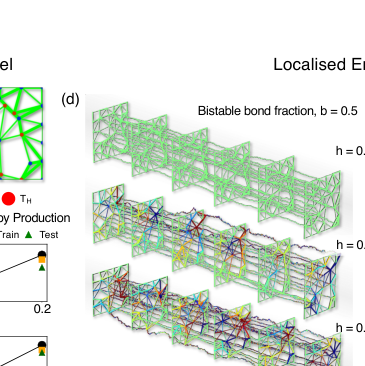 FIG. 5. Entropy production and finite-time fluctuations in active–bistable mechanical networks. (a) Example disordered two-dimensional spring network with a fraction of hot nodes (red, temperature Thot) and cold nodes (blue, Tcold). Thin green bonds denote linear springs, while thick green bonds indicate bistable springs. (b,c) Average entropy production rate as a function of the fraction of hot nodes h at fixed bistable bond fraction b = 0.5 (b), and as a function of the bistable bond fraction b at fixed h = 0.2 (c). Symbols show inferred values from training and test data, while solid lines indicate theoretical predictions for the total entropy production rate. (d) Spatial maps of the inferred local entropy production rate for increasing hot-node fraction h at fixed b = 0.5. (e) Spatial maps of the inferred local entropy production rate for increasing bistable bond fraction b at fixed h = 0.2. In (d) and (e), the network bonds are colored by the mean value of dissipation of the two nodes in the bond. Additionally, the time-series corresponds to 1000 consecutive steady state configurations. (f) Skewness of the time-integrated entropy production ∆Stot as a function of the integration time t for different bistable bond fractions b, showing a pronounced nonmonotonic dependence. (g) Fraction of time-integrated entropy production fluctuations lying above the mean, ⟨T+(t)⟩= P(∆Stot > ⟨∆Stot⟩), demonstrating a finite-time bias with ⟨T+(t)⟩< 1/2. (h) Characteristic integration time t∗at which the skewness is maximal, as a function of the bistable bond fraction b. Increasing the fraction of bistable bonds systematically amplifies finite-time asymmetries in cumulative entropy production and shifts the characteristic timescale to shorter values, demonstrating that mechanical nonlinearity enhances emergent non-Gaussian entropy production statistics at experimentally relevant finite times
FIG. 5. Entropy production and finite-time fluctuations in active–bistable mechanical networks. (a) Example disordered two-dimensional spring network with a fraction of hot nodes (red, temperature Thot) and cold nodes (blue, Tcold). Thin green bonds denote linear springs, while thick green bonds indicate bistable springs. (b,c) Average entropy production rate as a function of the fraction of hot nodes h at fixed bistable bond fraction b = 0.5 (b), and as a function of the bistable bond fraction b at fixed h = 0.2 (c). Symbols show inferred values from training and test data, while solid lines indicate theoretical predictions for the total entropy production rate. (d) Spatial maps of the inferred local entropy production rate for increasing hot-node fraction h at fixed b = 0.5. (e) Spatial maps of the inferred local entropy production rate for increasing bistable bond fraction b at fixed h = 0.2. In (d) and (e), the network bonds are colored by the mean value of dissipation of the two nodes in the bond. Additionally, the time-series corresponds to 1000 consecutive steady state configurations. (f) Skewness of the time-integrated entropy production ∆Stot as a function of the integration time t for different bistable bond fractions b, showing a pronounced nonmonotonic dependence. (g) Fraction of time-integrated entropy production fluctuations lying above the mean, ⟨T+(t)⟩= P(∆Stot > ⟨∆Stot⟩), demonstrating a finite-time bias with ⟨T+(t)⟩< 1/2. (h) Characteristic integration time t∗at which the skewness is maximal, as a function of the bistable bond fraction b. Increasing the fraction of bistable bonds systematically amplifies finite-time asymmetries in cumulative entropy production and shifts the characteristic timescale to shorter values, demonstrating that mechanical nonlinearity enhances emergent non-Gaussian entropy production statistics at experimentally relevant finite times
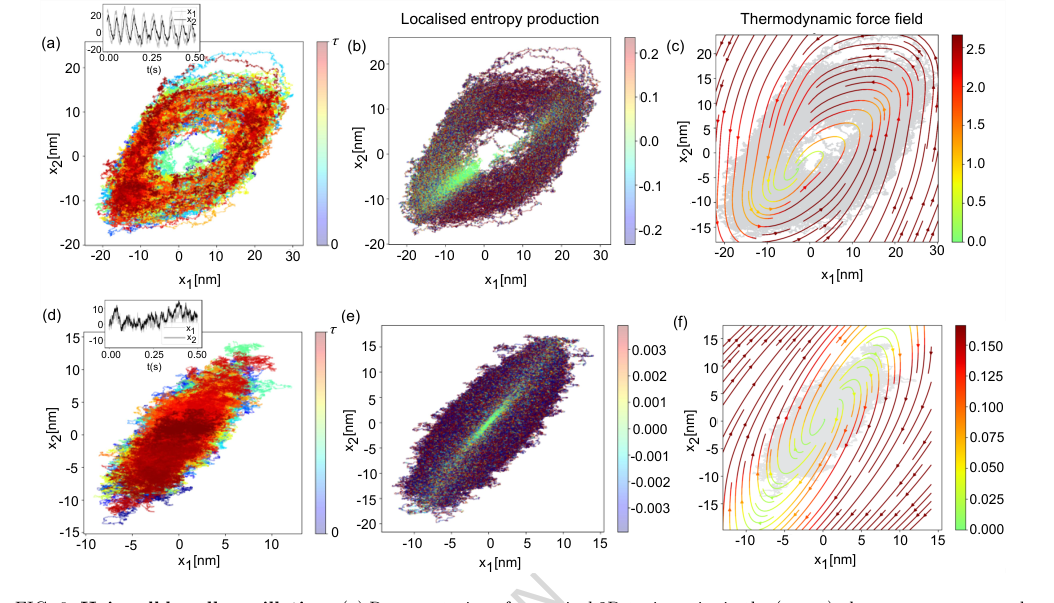 FIG. 6. Hair-cell bundle oscillation. (a) Representation of numerical 2D-trajectories in the (x1, x2) phase space correspond- ing to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the oscillatory nature of dynamics for Fmax = 57.14 pN and S = 0.94. (b) The local entropy production rate (in units of kB/s) is computed using the neural network representation. It captures the active state of dynamics. The colours are for comparative visualisation and do not represent the true value. (c) Thermodynamic force field of the oscillatory state of the dynamics. (d) Representation of numerical 2D-trajectories in the (x1, x2) phase space corresponding to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the quiescent (non-oscillatory) state of dynamics for Fmax = 40 pN and S = 1. (e) Entropy production rate (in units of kB/s) is locally computed along such trajectories. The colours are for comparative visualisation and do not represent the true value. (f) Thermodynamic force field of the oscillatory state of the dynamics. The colour scale of local entropy production is thresholded symmetrically between [−10× median, 10 × median] for the oscillatory case and [−500 × median, 500× median] for the quiescent case, while the colour scale for the force field of both cases is thresholded between [0, median]. The other system parameters remain the same as mentioned in Fig.(4) of Ref. [12]: γ1 = 2.8 µN s/m, γ2 = 10 µN s/m, kgs = 0.75 pN/nm, ksp = 0.6 pN/nm, D = 61 nm, N = 50, ∆G = 10kBT, kBT = 4.143 pNnm and Teff = 1.5T
FIG. 6. Hair-cell bundle oscillation. (a) Representation of numerical 2D-trajectories in the (x1, x2) phase space correspond- ing to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the oscillatory nature of dynamics for Fmax = 57.14 pN and S = 0.94. (b) The local entropy production rate (in units of kB/s) is computed using the neural network representation. It captures the active state of dynamics. The colours are for comparative visualisation and do not represent the true value. (c) Thermodynamic force field of the oscillatory state of the dynamics. (d) Representation of numerical 2D-trajectories in the (x1, x2) phase space corresponding to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the quiescent (non-oscillatory) state of dynamics for Fmax = 40 pN and S = 1. (e) Entropy production rate (in units of kB/s) is locally computed along such trajectories. The colours are for comparative visualisation and do not represent the true value. (f) Thermodynamic force field of the oscillatory state of the dynamics. The colour scale of local entropy production is thresholded symmetrically between [−10× median, 10 × median] for the oscillatory case and [−500 × median, 500× median] for the quiescent case, while the colour scale for the force field of both cases is thresholded between [0, median]. The other system parameters remain the same as mentioned in Fig.(4) of Ref. [12]: γ1 = 2.8 µN s/m, γ2 = 10 µN s/m, kgs = 0.75 pN/nm, ksp = 0.6 pN/nm, D = 61 nm, N = 50, ∆G = 10kBT, kBT = 4.143 pNnm and Teff = 1.5T
परिणाम, सीमाएँ और निष्कर्ष
प्रायोगिक डिजाइन और बेसलाइन
लेखकों के गणितीय दावों को निर्दयतापूर्वक साबित करने के दृष्टिकोण ने डीप न्यूरल नेटवर्क के साथ अल्पकालिक थर्मोडायनामिक अनिश्चितता संबंध (TUR) अनुमान योजना को संयोजित करने वाले डेटा-संचालित ढांचे पर ध्यान केंद्रित किया। मुख्य प्रायोगिक डिजाइन में शामिल हैं:
-
गणितीय आधार: विधि TUR से प्राप्त एक भिन्न उद्देश्य फ़ंक्शन को अधिकतम करके क्षयकारी (थर्मोडायनामिक) बल क्षेत्र $F(x,t)$ और संबंधित उतार-चढ़ाव वाले एन्ट्रॉपी उत्पादन $\sigma$ का अनुमान लगाने का लक्ष्य रखती है। विशेष रूप से, उद्देश्य $\sigma_{TUR}(t) := \max_{d} \frac{1}{\Delta t} \frac{2 \langle J_{\Delta t}^d \rangle^2}{\text{Var}(J_{\Delta t}^d)}$ को अधिकतम करना है, जहां $J_{\Delta t}^d$ एक सामान्यीकृत वर्तमान है। यह सूत्रीकरण सिस्टम के अंतर्निहित गतिशील समीकरणों के पूर्व ज्ञान के बिना अनुमान की अनुमति देता है।
-
मशीन लर्निंग आर्किटेक्चर: एक बहु-परत तंत्रिका नेटवर्क को इष्टतम गुणांक क्षेत्र $d(x,t)$ का अनुमान लगाने के लिए नियोजित किया जाता है, जो थर्मोडायनामिक बल क्षेत्र $F(x,t)$ के समानुपाती होता है। समय-निर्भर प्रक्रियाओं के लिए, नेटवर्क को समय $t$ को एक अतिरिक्त इनपुट के रूप में लेने के लिए बढ़ाया जाता है, और प्रशिक्षण उद्देश्य को लौकिक चिकनाई को लागू करने और सामान्यीकरण को सक्षम करने के लिए नमूना समय बिंदुओं के मिनी-बैच पर एकत्रित किया जाता है।
-
डेटा जनरेशन और सत्यापन: विभिन्न प्रणालियों के लिए संख्यात्मक प्रक्षेपवक्र उत्पन्न किए जाते हैं। स्थिर प्रक्रियाओं के लिए, प्रक्षेपवक्रों को प्रशिक्षण और सत्यापन सेट में विभाजित किया जाता है। मापदंडों को प्रशिक्षण डेटा पर ग्रेडिएंट आरोहण के माध्यम से अनुकूलित किया जाता है, और अंतिम मॉडल को ओवरफिटिंग को रोकने के लिए अलग रखे गए सत्यापन डेटा पर इसके प्रदर्शन के आधार पर चुना जाता है।
इस दृष्टिकोण के "पीड़ित" (बेसलाइन मॉडल या चुनौतीपूर्ण परिदृश्य) जिन्हें इसके प्रदर्शन को हराने के लिए डिज़ाइन किया गया था, और जिनके खिलाफ इसके प्रदर्शन का मूल्यांकन किया गया था, उनमें शामिल हैं:
- विश्लेषणात्मक रूप से सुलभ प्रणालियाँ: उन प्रणालियों के लिए जहां थर्मोडायनामिक बल क्षेत्र और एन्ट्रॉपी उत्पादन विश्लेषणात्मक रूप से ज्ञात हैं (जैसे, हार्मोनिक ब्राउनियन गाइरेटर, एन-आयामी रैखिक गाइरेटर, कोर्स-ग्रेन रैखिक गाइरेटर), अनुमानित परिणामों की सीधे सैद्धांतिक बेंचमार्क से तुलना की जाती है। यह एक निश्चित मात्रात्मक सत्यापन प्रदान करता है।
- जटिल गैर-रेखीय प्रणालियाँ: उन प्रणालियों के लिए जहां विश्लेषणात्मक समाधान दुर्गम या ए प्रियोरी भविष्यवाणी करने में कठिन होते हैं (जैसे, अनहार्मोनिक ब्राउनियन गाइरेटर, सक्रिय-द्विस्थिर यांत्रिक नेटवर्क, हेयर-सेल बंडल दोलन), विधि की क्षय और बल क्षेत्रों की भौतिक रूप से सहज और सुसंगत स्थानिक-सामयिक संरचनाओं को प्रकट करने की क्षमता प्रदर्शित की जाती है। ये प्रणालियाँ पारंपरिक विधियों के लिए एक चुनौती पेश करती हैं जो स्पष्ट गतिशील समीकरणों पर निर्भर करती हैं।
- समय-निर्भर प्रक्रियाएँ: एक स्पष्ट रूप से समय-निर्भर गैर-संतुलन प्रक्रिया, बिट-इरेज़र प्रोटोकॉल, समय-परिवर्तनीय बल क्षेत्रों और एन्ट्रॉपी उत्पादन दरों को संभालने के लिए विधि की क्षमता के लिए एक परीक्षण आधार के रूप में कार्य करती है, जो कम्प्यूटेशनल रूप से पारंपरिक दृष्टिकोणों के लिए चुनौतीपूर्ण हैं।
- कम अवलोकन पहुंच: 3डी हार्मोनिक गाइरेटर पर कोर्स-ग्रेनिंग प्रयोग (आयामी और लौकिक) विधि की मजबूती का परीक्षण करते हैं जब केवल आंशिक या सबसैंपल प्रक्षेपवक्र डेटा उपलब्ध होता है, जो छिपे हुए स्वतंत्रता की डिग्री या परिमित नमूना दरों जैसी यथार्थवादी प्रयोगात्मक बाधाओं की नकल करता है।
साक्ष्य क्या साबित करता है
पत्र में प्रस्तुत साक्ष्य निश्चित रूप से साबित करते हैं कि मुख्य तंत्र - अल्पकालिक TUR को डीप न्यूरल नेटवर्क के साथ जोड़ना डेटा-संचालित अनुमान के लिए - सफलतापूर्वक एन्ट्रॉपी उत्पादन को स्थानीयकृत करता है और गैर-संतुलन प्रक्षेपवक्रों के साथ क्षयकारी बल क्षेत्रों का पुनर्निर्माण करता है।
-
सटीक बल क्षेत्र और एन्ट्रॉपी उत्पादन अनुमान:
-
ब्राउनियन गाइरेटर: 2डी गाइरेटर (चित्र 2) के लिए, विधि स्थानीय एन्ट्रॉपी उत्पादन दर और थर्मोडायनामिक बल क्षेत्र दोनों का सटीक अनुमान लगाती है। हार्मोनिक मामले के लिए, अनुमानित बल क्षेत्र परिमाण क्षमता न्यूनतम के पास न्यूनतम है, जो सैद्धांतिक रूप से अपेक्षित लगभग शून्य एन्ट्रॉपी उत्पादन से संबंधित है। गैर-रेखीय अनहार्मोनिक और चतुर्थांश गाइरेटर के लिए, विधि क्षय की जटिल, गैर-तुच्छ स्थानिक-सामयिक संरचनाओं (जैसे, चतुर्थांश मामले में चार भंवर, चित्र 2(i)) को प्रकट करती है, जिसे इस डेटा-संचालित दृष्टिकोण के बिना भविष्यवाणी करना बेहद मुश्किल होगा।
-
एन-आयामी गाइरेटर (एन=100): अनुमानित स्थानीय एन्ट्रॉपी उत्पादन दरें विश्लेषणात्मक अनुमानों (चित्र 4(b) और 4(c)) के साथ अच्छी दृश्य सहमति दिखाती हैं। मात्रात्मक रूप से, अनुमानित और विश्लेषणात्मक कुल एन्ट्रॉपी उत्पादन की तुलना करने वाला एक स्कैटर प्लॉट $R^2$ मान 0.7576 (चित्र 4(d)) देता है, जो उच्च-क्षय व्यवस्थाओं में विशेष रूप से मजबूत रैखिक सहसंबंध प्रदर्शित करता है। यह विधि की उच्च आयामों में स्केल करने और सटीक रूप से प्रदर्शन करने की क्षमता का निर्विवाद प्रमाण है।
-
सक्रिय-द्विस्थिर यांत्रिक नेटवर्क: अनुमानित औसत एन्ट्रॉपी उत्पादन दरें (चित्र 5(b) और 5(c) में प्रतीक) विभिन्न गर्म-नोड अंशों और द्विस्थिर बॉन्ड अंशों में सैद्धांतिक भविष्यवाणियों (ठोस रेखाएं) के साथ उल्लेखनीय रूप से अच्छी तरह से संरेखित होती हैं। स्थानीय एन्ट्रॉपी उत्पादन के स्थानिक मानचित्र (चित्र 5(d) और 5(e)) स्पष्ट रूप से दर्शाते हैं कि क्षय विषम रूप से कैसे व्यवस्थित होता है, जो जटिल, परस्पर क्रिया करने वाली प्रणालियों में विधि की क्षमता को साबित करता है।
- हेयर-सेल बंडल दोलन: विधि दोलनशील और शांत दोनों अवस्थाओं (चित्र 6(b,c,e,f)) के लिए स्थानीय एन्ट्रॉपी उत्पादन और थर्मोडायनामिक बल क्षेत्रों की गणना करने में सफल होती है, सक्रिय गतिशीलता को पकड़ती है और विभिन्न गतिशील व्यवस्थाओं के बीच अंतर करती है। दोलनशील अवस्था में दृढ़ता से परिचालित बल क्षेत्र, उदाहरण के लिए, मजबूत अपरिवर्तनीयता का एक स्पष्ट हस्ताक्षर है।
-
-
मजबूती और मौलिक भौतिकी के साथ संगति:
- स्थानीय उतार-चढ़ाव प्रमेय: साक्ष्य का एक महत्वपूर्ण टुकड़ा यह प्रदर्शन है कि अनुमानित स्थानीय एन्ट्रॉपी उत्पादन उतार-चढ़ाव प्रमेय को संतुष्ट करता है। स्थानीय एन्ट्रॉपी उत्पादन की संभाव्यता वितरण में महत्वपूर्ण क्षेत्र-निर्भर अंतर के बावजूद, चित्र 3(c) के इनसेट से पता चलता है कि उतार-चढ़ाव अनुपात $\ln[P(dS_{tot})/P(-dS_{tot})]$ $dS_{tot}$ के साथ एक इकाई ढलान के साथ एक रैखिक संबंध प्रदर्शित करता है। यह अनुमानित मात्रा की भौतिक संगति का एक शक्तिशाली, डेटा-संचालित सत्यापन है।
- कोर्स-ग्रेनिंग मजबूती: विधि कम अवलोकन पहुंच के तहत मजबूत साबित होती है। 3डी गाइरेटर के लिए आयामी और लौकिक कोर्स-ग्रेनिंग के अधीन, अनुमानित उतार-चढ़ाव वाले एन्ट्रॉपी उत्पादन दरें विश्लेषणात्मक बेंचमार्क (चित्र 9(b) और 9(d)) के साथ अच्छी तरह से मेल खाती हैं। स्कैटर प्लॉट $R^2$ मान 0.862 और 0.890 (चित्र 9(c) और 9(e)) के साथ मजबूत रैखिक सहसंबंध दिखाते हैं, यह पुष्टि करते हुए कि विधि छिपे हुए स्वतंत्रता की डिग्री या सबसैंपल डेटा के साथ भी सांख्यिकीय रूप से सुसंगत परिणाम प्रदान करती है।
संक्षेप में, पत्र निश्चित, निर्विवाद प्रमाण प्रदान करता है कि इसका मुख्य तंत्र वास्तव में काम करता है:
* ज्ञात विश्लेषणात्मक समाधानों के साथ उच्च मात्रात्मक समझौता प्राप्त करना।
* जटिल, गैर-रेखीय प्रणालियों में भौतिक रूप से सुसंगत और व्याख्यात्मक स्थानिक-सामयिक पैटर्न प्रकट करना जहां विश्लेषणात्मक समाधान उपलब्ध नहीं हैं।
* स्थानीय स्तर पर उतार-चढ़ाव प्रमेय जैसे मौलिक थर्मोडायनामिक सिद्धांतों के पालन का प्रदर्शन करना।
* विभिन्न रूपों की डेटा कोर्स-ग्रेनिंग के तहत मजबूती और सांख्यिकीय संगति दिखाना।
"पीड़ितों" को वास्तव में पराजित किया गया था, क्योंकि प्रस्तावित विधि पारंपरिक दृष्टिकोणों की सीमाओं को पार करती है जिन्हें ए प्रियोरी गतिशीलता के ज्ञान की आवश्यकता होती है, उच्च आयामीता के साथ संघर्ष करती है, या एन्ट्रॉपी उत्पादन और क्षयकारी बलों में स्थानीयकृत, प्रक्षेपवक्र-हल अंतर्दृष्टि प्रदान करने में विफल रहती है।
सीमाएँ और भविष्य की दिशाएँ
जबकि प्रस्तुत ढांचा गैर-संतुलन प्रणालियों को समझने के लिए एक शक्तिशाली नया लेंस प्रदान करता है, इसकी वर्तमान सीमाओं को स्वीकार करना और भविष्य के विकास के लिए रोमांचक रास्तों पर विचार करना महत्वपूर्ण है।
सीमाएँ:
- कम-क्षय व्यवस्थाओं में प्रदर्शन: पत्र नोट करता है कि उच्च-आयामी प्रणालियों के लिए, कमजोर क्षयकारी क्षेत्रों में अनुमान सटीकता कम हो सकती है (चित्र 4(e) इनसेट)। यह एक कम प्रभावी सिग्नल-टू-नॉइज़ अनुपात के कारण है, जिससे तंत्रिका नेटवर्क के लिए विभिन्न एन्ट्रॉपी उत्पादन पैमानों में समान रूप से सामान्यीकृत करना कठिन हो जाता है। इन चुनौतीपूर्ण व्यवस्थाओं में मजबूती में सुधार एक खुला प्रश्न बना हुआ है।
- कम्प्यूटेशनल संसाधन और डेटा आवश्यकताएँ: स्केलेबल होने के बावजूद, डीप न्यूरल नेटवर्क को प्रशिक्षित करना, विशेष रूप से उच्च-आयामी और समय-निर्भर प्रणालियों के लिए, कम्प्यूटेशनल रूप से गहन हो सकता है और बड़ी मात्रा में प्रक्षेपवक्र डेटा की आवश्यकता हो सकती है (जैसे, कुछ मॉडलों के लिए $2 \times 10^6$ बिंदु)। सीमित डेटा उपलब्धता वाले प्रयोगों के लिए यह व्यावहारिक बाधाएं पेश कर सकता है।
- परिमित समय-चरण प्रभाव: विधि TUR की अल्पकालिक सीमा पर निर्भर करती है। व्यवहार में, प्रयोगात्मक डेटा एक परिमित समय अंतराल $\Delta t$ पर नमूना किया जाता है। जबकि पत्र एक मानदंड $\Delta t/\tau_{min} \ll 1$ का सुझाव देता है, बड़े $\Delta t$ मानों का अनुमानित मात्राओं की सटीकता और व्याख्या पर कैसे प्रभाव पड़ता है, विशेष रूप से अत्यधिक गतिशील प्रणालियों के लिए, एक व्यापक विश्लेषण फायदेमंद हो सकता है।
- कोर्स-ग्रेन किए गए बल क्षेत्रों की व्याख्या: कोर्स-ग्रेनिंग लागू करते समय, सीखी गई बल क्षेत्र चुनी गई रिज़ॉल्यूशन पर एक प्रभावी प्रतिनिधित्व है। जटिल गैर-रेखीय प्रणालियों के लिए, जहां कोर्स-ग्रेन किए गए विवरणों के लिए विश्लेषणात्मक बेंचमार्क उपलब्ध नहीं हैं, इन प्रभावी क्षेत्रों की सटीक भौतिक व्याख्या के लिए आगे सैद्धांतिक विकास की आवश्यकता हो सकती है।
- स्थानीय और कुल एन्ट्रॉपी उत्पादन के बीच अंतर: स्पष्ट रूप से समय-निर्भर प्रक्रियाओं के लिए, विधि द्वारा अनुमानित स्थानीय एन्ट्रॉपी उत्पादन $dS(t)$ कुल स्टोकेस्टिक एन्ट्रॉपी उत्पादन से संभाव्यता घनत्व की स्पष्ट समय निर्भरता से संबंधित एक शब्द से भिन्न होता है। जबकि $dS(t)$ औसत दर में अपरिवर्तनीय योगदान को पकड़ता है, दूसरे कानून का उल्लंघन करने वाली घटनाओं की पूरी विशेषता के लिए इस अतिरिक्त शब्द को ध्यान में रखने की आवश्यकता होगी, जो वर्तमान अनुमान द्वारा सीधे प्रदान नहीं किया जाता है।
भविष्य की दिशाएँ:
इस पत्र के निष्कर्षों ने कई भविष्य के अन्वेषणों के लिए एक मजबूत नींव रखी है, जो विभिन्न दृष्टिकोणों से महत्वपूर्ण सोच को उत्तेजित करती है:
-
विविध प्रयोगात्मक प्रणालियों में प्रयोज्यता का विस्तार:
- जैविक संदर्भ: वास्तविक जैविक प्रणालियों, जैसे सेलुलर सिग्नलिंग नेटवर्क, चयापचय मार्ग, या एकल-अणु प्रयोगों में आणविक मोटर्स के संचालन में ऊर्जा क्षय को मापने और स्थानिक-सामयिक रूप से स्थानीयकृत करने के लिए इस विधि को कैसे अनुकूलित किया जा सकता है? क्या यह जीवित कोशिकाओं में ऊर्जा पारगमन या विनियमन के नए तंत्रों को प्रकट कर सकता है?
- सक्रिय पदार्थ भौतिकी: क्या स्व-चालित कोलाइड या जीवाणु कॉलोनियों जैसी सक्रिय पदार्थ प्रणालियों को समझने के लिए ढांचे को लागू किया जा सकता है ताकि यह समझा जा सके कि स्थानीय ऊर्जा क्षय सामूहिक व्यवहार, स्व-संगठन और चरण संक्रमण को कैसे चलाता है? सक्रिय अशांति या पैटर्न गठन में कौन सी नई अंतर्दृष्टि उभर सकती है?
-
सैद्धांतिक और एल्गोरिथम नींव को आगे बढ़ाना:
- ओवरडैम्प्ड गतिशीलता से परे: वर्तमान कार्य ओवरडैम्प्ड डिफ्यूसिव प्रक्रियाओं पर केंद्रित है। अंडरडैम्प्ड प्रणालियों के लिए विधि को कैसे बढ़ाया और कठोरता से मान्य किया जा सकता है, जहां जड़त्वीय प्रभाव महत्वपूर्ण हैं, या गैर-मार्कोवियन गतिशीलता के लिए, जो कई जटिल प्रणालियों में प्रचलित हैं?
- कम सिग्नल-टू-नॉइज़ व्यवस्थाओं में मजबूती: कौन से नवीन तंत्रिका नेटवर्क आर्किटेक्चर, नियमितीकरण तकनीक, या भौतिकी-सूचित मशीन लर्निंग रणनीतियाँ उच्च-आयामी, कमजोर क्षयकारी व्यवस्थाओं में विधि की सटीकता और सामान्यीकरण क्षमताओं को बढ़ा सकती हैं? क्या सीखने के उद्देश्य में अधिक स्पष्ट भौतिक बाधाओं को शामिल करने से मदद मिल सकती है?
- वास्तविक समय अनुमान: क्या प्रयोगात्मक डेटा स्ट्रीम के वास्तविक समय या निकट वास्तविक समय प्रसंस्करण के लिए अनुमान एल्गोरिथम को अनुकूलित किया जा सकता है? यह लाइव प्रयोगों में अनुकूली नमूनाकरण या प्रतिक्रिया नियंत्रण रणनीतियों को लागू करने के लिए महत्वपूर्ण होगा।
-
व्युत्क्रम डिजाइन और नियंत्रण के लिए स्थानीयकृत एन्ट्रॉपी का लाभ उठाना:
- इष्टतम नियंत्रण रणनीतियाँ: स्थानीयकरण क्षय को देखते हुए, इस जानकारी का उपयोग विशिष्ट कार्यों (जैसे, बिट इरेज़र, आणविक परिवहन) के लिए ऊर्जा क्षय को कम करने या वांछित गैर-संतुलन अवस्थाओं को प्राप्त करने के लिए इष्टतम नियंत्रण प्रोटोकॉल डिजाइन करने के लिए कैसे किया जा सकता है? क्या इससे अधिक ऊर्जा-कुशल नैनो मशीनें बन सकती हैं?
- सामग्री और प्रणालियों का व्युत्क्रम डिजाइन: क्या विधि को टेलर स्थानिक-सामयिक क्षय विशेषताओं के साथ सक्रिय सामग्री या जैविक नेटवर्क के व्युत्क्रम डिजाइन का मार्गदर्शन कर सकती है? उदाहरण के लिए, स्व-संयोजन या लक्षित बल उत्पादन के लिए विशिष्ट स्थानीय गैर-संतुलन गुणों वाले कोलाइडल जाली डिजाइन करना।
- अनुकूली नमूनाकरण: क्या अनुमानित स्थानीय एन्ट्रॉपी उत्पादन सांख्यिकीय दक्षता में सुधार करने और दुर्लभ घटनाओं को प्रकट करने के लिए उच्च-क्षयकारी क्षेत्रों पर ध्यान केंद्रित करके प्रयोगों में अनुकूली नमूनाकरण रणनीतियों का मार्गदर्शन कर सकता है?
-
सूचना सिद्धांत और थर्मोडायनामिक्स से संबंध खोजना:
- सूचना-ऊर्जा व्यापार-बंद: स्थानीयकृत एन्ट्रॉपी उत्पादन जटिल प्रणालियों में सूचना प्रसंस्करण और भंडारण से कैसे संबंधित है, विशेष रूप से जैविक संदर्भों में? क्या यह ढांचा नैनोस्केल पर गणना या संवेदन की मौलिक थर्मोडायनामिक लागतों में नई अंतर्दृष्टि प्रदान कर सकता है?
- जटिल प्रणालियों में उतार-चढ़ाव प्रमेय: अत्यधिक गैर-रेखीय, समय-निर्भर और कोर्स-ग्रेन किए गए प्रणालियों में स्थानीय उतार-चढ़ाव प्रमेय का आगे का अन्वेषण गैर-संतुलन सांख्यिकीय यांत्रिकी की हमारी समझ को गहरा कर सकता है।
ये भविष्य की दिशाएँ इस डेटा-संचालित दृष्टिकोण की परिवर्तनकारी क्षमता को रेखांकित करती हैं, जो वैश्विक औसत से परे जटिल प्रणालियों में ऊर्जा क्षय और अपरिवर्तनीयता की बारीक समझ की ओर बढ़ रही है, जिसका मौलिक विज्ञान और इंजीनियरिंग पर प्रभाव पड़ता है।
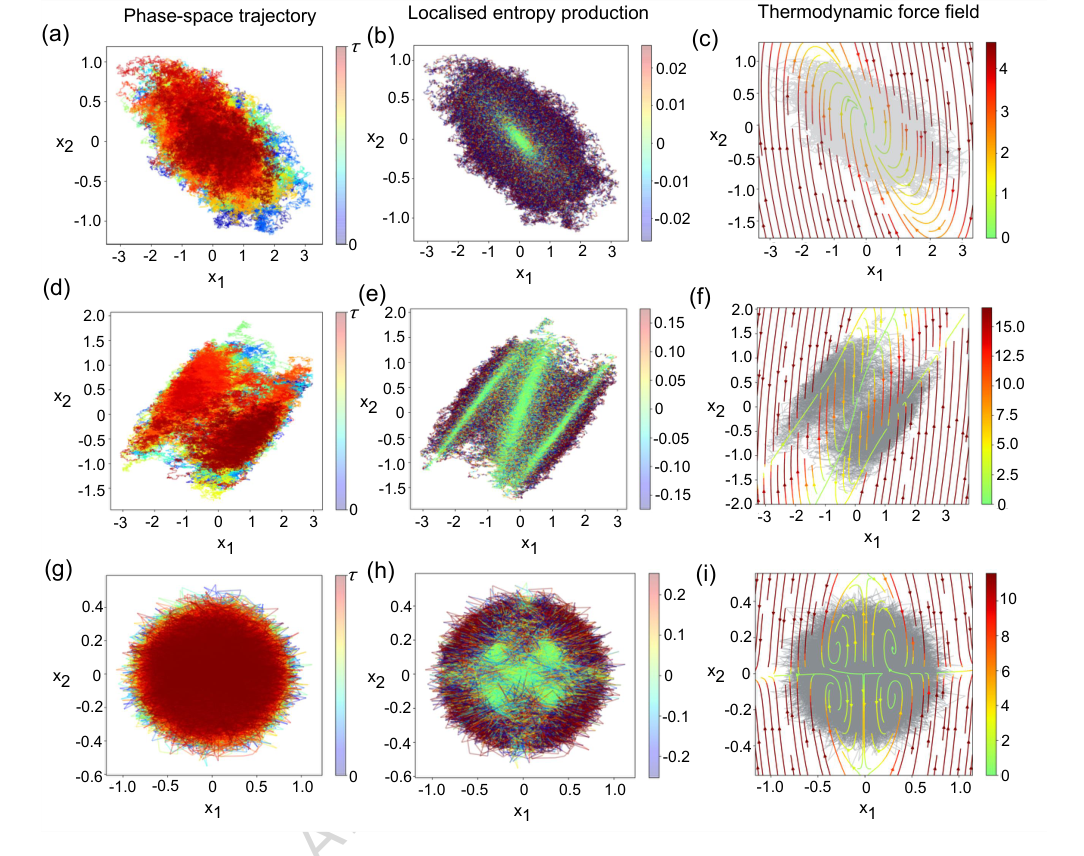 FIG. 2. Local entropy production in Brownian gyrator models. (a) 2D-dimensional trajectories of a Brownian gyrator system with harmonic confining potential. [Parameters: k1 = 1, k2 = 2, γ = 1, θ = π/4, D1 = 1, D2 = 0.1]. (b) local entropy production rate and (c) thermodynamic force field for the system with harmonic confinement - estimated using the neural network representation. (d) 2D-dimensional trajectories of a Brownian gyrator system with a bi-stable confining potential. [Parameters: k = 1, b = 1, γ = 1, θ = π/4, D1 = 1, D2 = 0.1] (e) local entropy production rate and (f) thermodynamic force field estimated using the neural network representation. (g) 2D-dimensional trajectories of a Brownian gyrator system with a quartic confining potential. [Parameters: k1 = k2 = 10, γ = 1, θ = π/4, D1 = 10, D2 = 1] (h) local entropy production rate and (i) thermodynamic force field estimated using the neural network representation. The colours corresponding to the local entropy production rate (in units of kB/s) of the gyrators are thresholded between [−α median, α median] , where α (typically 20 −50) multiplies the median of the corresponding local entropy production dataset. Values outside these ranges are clipped for visualisation purposes to prevent rare large fluctuations from dominating the colour mapping. Similarly, the thermodynamic force field values for the gyrators are thresholded within [0, median]. The numerical trajectories are usually generated for 2000s with a sampling rate of 1 kHz - from which trajectory traces of 500s are shown in the plots. The colorbars in panels (a), (d), and (e) indicate the progression along the trajectory
FIG. 2. Local entropy production in Brownian gyrator models. (a) 2D-dimensional trajectories of a Brownian gyrator system with harmonic confining potential. [Parameters: k1 = 1, k2 = 2, γ = 1, θ = π/4, D1 = 1, D2 = 0.1]. (b) local entropy production rate and (c) thermodynamic force field for the system with harmonic confinement - estimated using the neural network representation. (d) 2D-dimensional trajectories of a Brownian gyrator system with a bi-stable confining potential. [Parameters: k = 1, b = 1, γ = 1, θ = π/4, D1 = 1, D2 = 0.1] (e) local entropy production rate and (f) thermodynamic force field estimated using the neural network representation. (g) 2D-dimensional trajectories of a Brownian gyrator system with a quartic confining potential. [Parameters: k1 = k2 = 10, γ = 1, θ = π/4, D1 = 10, D2 = 1] (h) local entropy production rate and (i) thermodynamic force field estimated using the neural network representation. The colours corresponding to the local entropy production rate (in units of kB/s) of the gyrators are thresholded between [−α median, α median] , where α (typically 20 −50) multiplies the median of the corresponding local entropy production dataset. Values outside these ranges are clipped for visualisation purposes to prevent rare large fluctuations from dominating the colour mapping. Similarly, the thermodynamic force field values for the gyrators are thresholded within [0, median]. The numerical trajectories are usually generated for 2000s with a sampling rate of 1 kHz - from which trajectory traces of 500s are shown in the plots. The colorbars in panels (a), (d), and (e) indicate the progression along the trajectory
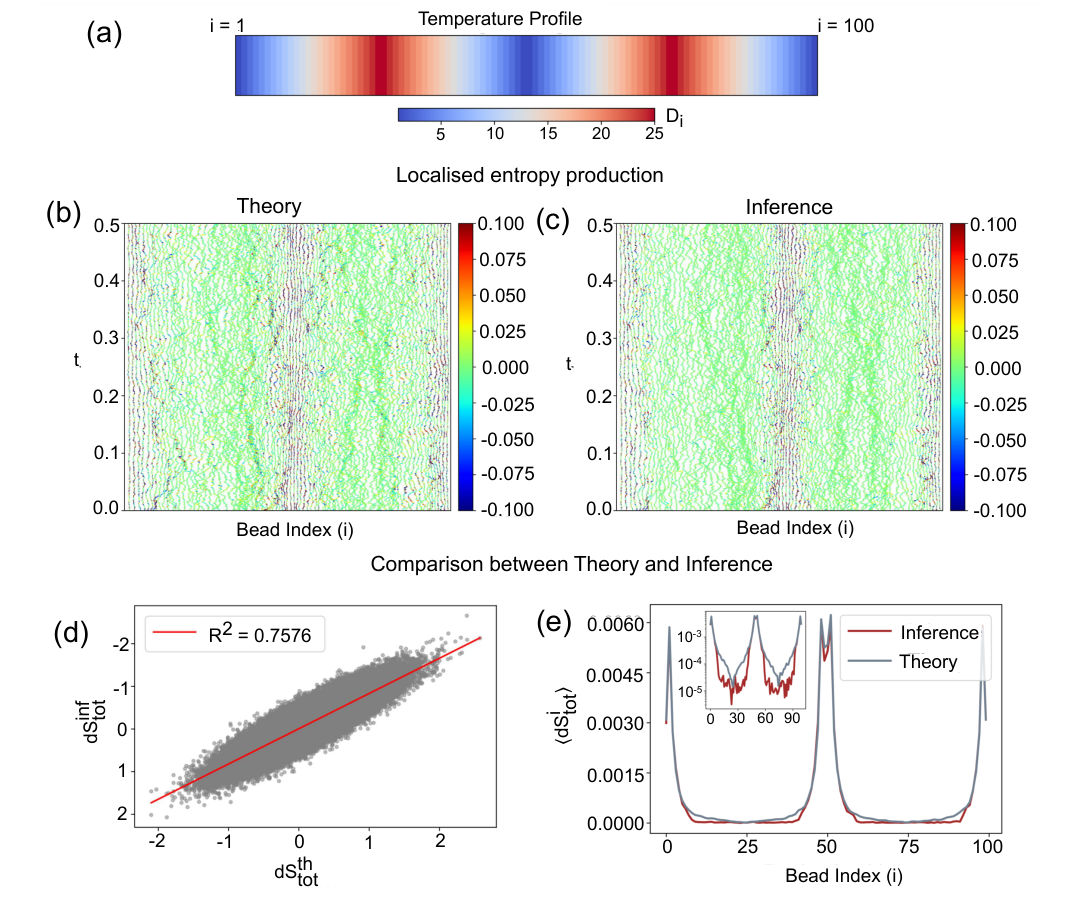 FIG. 4. Bead wise local entropy production for N-dimensional brownian gyrator model. (a) Temperature profile of the N-dimensional gyrator setup. Di denotes the diffusion coefficient of i-th bead as kB = γ = 1. (b) Analytically estimated local entropy production rate (in units of kB/s) of the system. (c) Local entropy production rate (in units of kB/s) inferred from the numerical trajectories using a neural network representation. The colors do not indicate the true values of the fluctuating entropy current, but they are thresholded for better visualisation. (d) Convergence test (R2 test) of the neural network–based estimation of the fluctuating entropy production rate for an N-dimensional Brownian gyrator with N = 100. The inferred and analytical local entropy production rates, averaged over all beads, exhibit a finite spread around the linear fit. (e) Comparison of the inferred average entropy production for each bead with the corresponding theoretical estimate. (Inset) The same data shown on a logarithmic (y-) scale reveals that dissipation of beads associated with low irreversible signature (entropy production) are challenging for the neural network to capture, resulting in a mismatch with the theoretical prediction
FIG. 4. Bead wise local entropy production for N-dimensional brownian gyrator model. (a) Temperature profile of the N-dimensional gyrator setup. Di denotes the diffusion coefficient of i-th bead as kB = γ = 1. (b) Analytically estimated local entropy production rate (in units of kB/s) of the system. (c) Local entropy production rate (in units of kB/s) inferred from the numerical trajectories using a neural network representation. The colors do not indicate the true values of the fluctuating entropy current, but they are thresholded for better visualisation. (d) Convergence test (R2 test) of the neural network–based estimation of the fluctuating entropy production rate for an N-dimensional Brownian gyrator with N = 100. The inferred and analytical local entropy production rates, averaged over all beads, exhibit a finite spread around the linear fit. (e) Comparison of the inferred average entropy production for each bead with the corresponding theoretical estimate. (Inset) The same data shown on a logarithmic (y-) scale reveals that dissipation of beads associated with low irreversible signature (entropy production) are challenging for the neural network to capture, resulting in a mismatch with the theoretical prediction
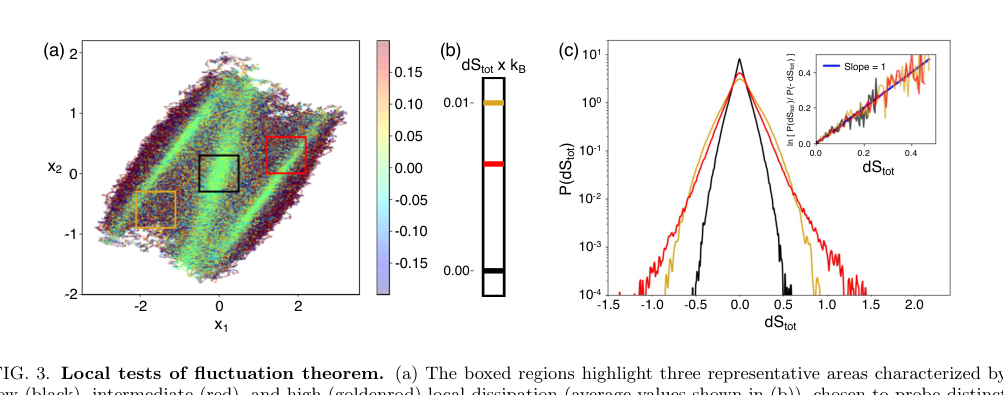 Figure 4. (b) depicts the local entropy production using the theoretically known form of F (x), while Figure 4(c) shows the same obtained from solving the inference algo- rithm. As we see, there is good visual agreement between the theory and the results obtained from the inference al- gorithm. To quantify the agreement between theory and infer- ence, Figure 4(d) shows a scatter plot comparing the analytically computed and learned entropy production, summed over all beads. The data follow a clear linear trend with an R2 value of 0.7576, with noticeably better agreement in the high-dissipation regime. To investigate the origin of the remaining spread, Figure 4(e) shows the time-averaged entropy production of each bead. This re- veals a separation of roughly two to three orders of mag- nitude between beads with high and low entropy produc- tion, and shows that the discrepancy between theory and inference is noticeably high at the low-dissipation beads
Figure 4. (b) depicts the local entropy production using the theoretically known form of F (x), while Figure 4(c) shows the same obtained from solving the inference algo- rithm. As we see, there is good visual agreement between the theory and the results obtained from the inference al- gorithm. To quantify the agreement between theory and infer- ence, Figure 4(d) shows a scatter plot comparing the analytically computed and learned entropy production, summed over all beads. The data follow a clear linear trend with an R2 value of 0.7576, with noticeably better agreement in the high-dissipation regime. To investigate the origin of the remaining spread, Figure 4(e) shows the time-averaged entropy production of each bead. This re- veals a separation of roughly two to three orders of mag- nitude between beads with high and low entropy produc- tion, and shows that the discrepancy between theory and inference is noticeably high at the low-dissipation beads
अन्य क्षेत्रों से संबंध
गणितीय कंकाल
इस कार्य का शुद्ध गणितीय मूल शोर प्रक्षेपवक्र डेटा से एक छिपे हुए बल क्षेत्र का अनुमान लगाने के लिए डिज़ाइन किया गया एक भिन्न अनुकूलन ढांचा है। यह एक विशिष्ट सिग्नल-टू-नॉइज़ अनुपात को अधिकतम करके इसे प्राप्त करता है - एक सामान्यीकृत वर्तमान के औसत से विचरण का वर्ग - जहां अज्ञात बल क्षेत्र को डीप न्यूरल नेटवर्क द्वारा मजबूती से पैरामीट्रिज किया जाता है।
आसन्न अनुसंधान क्षेत्र
इष्टतम नियंत्रण सिद्धांत
यह पत्र स्पष्ट रूप से इष्टतम नियंत्रण सिद्धांत से एक संबंध बनाता है, यह नोट करते हुए कि एन्ट्रॉपी उत्पादन दर का भिन्न प्रतिनिधित्व (समीकरण (9)) इस क्षेत्र में एक स्थापित रूप है। इष्टतम नियंत्रण में, लक्ष्य अक्सर एक उद्देश्य कार्यात्मक को अनुकूलित करने वाले नियंत्रण फ़ंक्शन को खोजना होता है, जो सिस्टम प्रक्षेपवक्र या सांख्यिकीय औसत पर निर्भर हो सकता है। यहां, थर्मोडायनामिक बल क्षेत्र $d(\mathbf{x},t)$ ऐसे फ़ंक्शन के रूप में कार्य करता है, जो $2 \langle J_{\Delta t}^d \rangle^2 / \text{Var}(J_{\Delta t}^d)$ अनुपात को अधिकतम करने के लिए सिस्टम की गतिशीलता को प्रभावित करता है। इस बल क्षेत्र को पैरामीट्रिज करने के लिए डीप न्यूरल नेटवर्क का उपयोग और इसके अनुकूलन के लिए ग्रेडिएंट-आधारित विधियां, विशेष रूप से जब विश्लेषणात्मक समाधान मायावी होते हैं, तो जटिल, डेटा-संचालित इष्टतम नियंत्रण समस्याओं को हल करने के लिए एक आधुनिक दृष्टिकोण का प्रतिनिधित्व करती हैं। यह रणनीति देखे गए सिस्टम व्यवहार से एक इष्टतम प्रतिक्रिया नियंत्रण कानून सीखने के समान है। इष्टतम नियंत्रण और तंत्रिका नेटवर्क को संयोजित करने वाले एक संबंधित दृष्टिकोण के लिए, यान, टोशेट्टे और रोट्सकॉफ (2022, फिजिकल रिव्यू ई) देखें।
स्टोकेस्टिक प्रक्रियाओं के लिए सांख्यिकीय अनुमान
यह कार्य स्टोकेस्टिक प्रक्रियाओं के लिए सांख्यिकीय अनुमान में एक महत्वपूर्ण योगदान देता है, विशेष रूप से गैर-संतुलन प्रणालियों में। चुनौती अंतर्निहित गतिशील समीकरणों के पूर्व ज्ञान के बिना प्रयोगात्मक प्रक्षेपवक्र डेटा से सीधे अज्ञात मापदंडों या बल क्षेत्रों का अनुमान लगाना है। प्रस्तुत विधि थर्मोडायनामिक अनिश्चितता संबंध (TUR) की अल्पकालिक सीमा का लाभ उठाती है ताकि क्षयकारी बल क्षेत्र और स्थानीय एन्ट्रॉपी उत्पादन के लिए एक मॉडल-मुक्त अनुमान योजना प्रदान की जा सके। यह पारंपरिक विधियों के विपरीत है जो विशिष्ट मॉडल मान्यताओं (जैसे, फोकर-प्लैंक समीकरण) पर भरोसा कर सकती हैं या सिस्टम को परेशान करने की आवश्यकता होती है। शोरगुल वाले, उच्च-आयामी डेटा से थर्मोडायनामिक बल क्षेत्र जैसी भौतिक रूप से सार्थक मात्राओं को निकालने की क्षमता इस क्षेत्र में एक प्रमुख समस्या है। इस डोमेन में प्रासंगिक कार्यों में फ्रिशमैन और रोन्सेरे (2020, फिजिकल रिव्यू एक्स) और मणिकंदन एट अल। (2020, फिजिकल रिव्यू लेटर्स) शामिल हैं, जो बलों और एन्ट्रॉपी उत्पादन के डेटा-संचालित अनुमान की खोज करते हैं।
भौतिकी-सूचित मशीन लर्निंग
हालांकि स्पष्ट रूप से ऐसे लेबल नहीं किए गए हैं, कार्यप्रणाली दृढ़ता से भौतिकी-सूचित मशीन लर्निंग (PIML) के सिद्धांतों के साथ संरेखित होती है। तंत्रिका नेटवर्क को एक मनमाना हानि फ़ंक्शन पर प्रशिक्षित नहीं किया जाता है, बल्कि सीधे एक मौलिक भौतिक सिद्धांत: थर्मोडायनामिक अनिश्चितता संबंध (TUR) से प्राप्त उद्देश्य पर प्रशिक्षित किया जाता है। यह भौतिक बाधा, समीकरण (9) में व्यक्त, सीखने की प्रक्रिया का मार्गदर्शन करती है, यह सुनिश्चित करती है कि अनुमानित क्षयकारी बल क्षेत्र भौतिक रूप से सुसंगत और सार्थक हो। यह एक भौतिक कानून को मशीन लर्निंग उद्देश्य फ़ंक्शन में एकीकृत करने का दृष्टिकोण, विशेष रूप से सीमित या शोरगुल वाले डेटा वाले परिदृश्यों में, अधिक मजबूत और व्याख्यात्मक मॉडल की अनुमति देता है, अंतर्निहित भौतिक कानूनों को उजागर करने के लिए उपकरणों के रूप में, न कि केवल डेटा इंटरपोलेटर के रूप में। यह दृष्टिकोण वैज्ञानिक खोज का एक शक्तिशाली प्रतिमान प्रस्तुत करता है। PIML का एक सामान्य अवलोकन रायसी, पेरडिकारिस और कार्नियाडकिस (2019, जर्नल ऑफ कम्प्यूटेशनल फिजिक्स) में पाया जा सकता है।