非平衡経路に沿ったエントロピー生成の局在化
Entropy production is a universal measure of irreversibility and energy dissipation in physical, chemical, and biological systems operating far from equilibrium.
背景と学術的系譜
起源と学術的系譜
本論文の中心的な問題は、非平衡統計物理学における長年にわたる根本的な課題、すなわち、実験的に観測されたデータから、複雑なシステム内の不可逆性およびエネルギー散逸を、時空間的に正確に局在化して定量化する方法である。エントロピー生成の概念はこれらの現象の普遍的な指標として機能するが、非平衡経路に沿ったその正確な時空間的局在化は、依然として重要な「未解決の課題」(Page 2)であった。
歴史的には、学術的系譜は確率熱力学 [17-19] の進歩とデータ駆動型アプローチ [11, 20-23] の出現に遡る。これらの分野は、特に熱的ゆらぎが顕著な場合 [18, 26] における非平衡過程の個々の実現におけるエントロピー生成を理解するための厳密な枠組みを提供した。しかし、大きな障害が残っていた。エントロピー生成または散逸力場を測定するための従来のメソッドは、通常、フォッカー・プランク方程式やマスター方程式のような、システムの根底にある動力学方程式の事前知識に依存していた。多くの現実的な実験シナリオでは、これらの方程式とその解は未知であり、従来ののアプローチは実用的ではなかった(Page 2)。
過去の研究は、主に平均エントロピー生成率の大域的推定値を得ることに焦点を当てていた。原田・笹の等式 [6]、定常状態電流の推定 [5]、時間不可逆性尺度 [26-31]、経路確率推定器 [4, 32, 33] のような手法は貴重な洞察を提供したが、それらは一般的に、散逸の詳細かつ局在的な像よりも、全体的な尺度を提供していた。エントロピー生成を局在化する試みはしばしば限定的であった。例えば、総当たり統計ビン法 [20] は高次元システムではスケールが悪く、一部のニューラルネットワークアプローチは経路に沿ったエントロピー生成を学習したが、根底にある散逸力場の構造を完全に解明するには至らなかった [23]。他の手法は、残りの成分が既に既知であると仮定して、散逸力場の一部しか推測できなかった [11, 40]。本論文が解決しようとする根本的な限界、すなわち「ペインポイント」は、特に複雑で高次元かつ時間依存的な非平衡システムにおいて、その支配的な動力学の明示的な知識を必要とせずに、実験的軌道データから直接、散逸力場とゆらぐエントロピー生成の両方の時空間構造を推測するための、堅牢でスケーラブルかつモデルフリーな手法の欠如である。この重大なギャップが、熱力学的不確定性関係(TUR)と機械学習を活用した、ここで提示されるデータ駆動型アプローチの開発を動機づけた。
直感的な領域用語
- エントロピー生成 ($\sigma$): 完全に整理された部屋を想像してください。パーティーを開くと、部屋は散らかります。「エントロピー生成」とは、パーティー中に発生した不可逆的な散らかりの量のようなものです。値が高いほど、より多くの混沌があり、部屋を元の状態に簡単に戻す能力が低下します。
- 非平衡経路: 混雑した市場を歩く人を想像してください。彼らは常に動き、人々にぶつかり、方向を変え、決して真にバランスの取れた状態で静止しません。「非平衡経路」とは、その人が取る特定の、曲がりくねった道であり、常に動き、周囲と相互作用しています。
- 熱力学力場 ($F(\mathbf{x}, t)$): これは、複雑な環境内で物体を特定の、しばしば渦巻くような方法で動かす見えない「流れ」または「風」のようなものです。それは単なる単純な押し込みではなく、システムを穏やかな平衡状態から遠ざけ、エネルギーを散逸させる動的で空間的に変動する影響です。
- 熱力学的不確定性関係 (TUR): ロープの上を歩く人を考えてください。「TUR」は、「ロープを速く渡ろうとするほど(エントロピー生成が高いほど)、体の揺れやぐらつきが大きくなる(動きのゆらぎが避けられない)」(The faster you try to cross the rope (higher entropy production), the more your body will sway and wobble (larger fluctuations in your movement are inevitable).)という基本的な規則のようなものです。これは、不可逆的なタスクをどれだけ効率的に実行するかと、その経路がどれだけ予測可能であるかとの間のトレードオフを確立します。
- 過減衰拡散過程: 静かな空気中をゆっくりと落下する小さな羽を想像してください。その落下は、自身の運動量ではなく、空気抵抗とランダムな空気の流れによって完全に決定されます。「過減衰拡散過程」は、慣性が無視でき、運動が摩擦と環境からのランダムな押し込みによって支配される動きを記述します。
記法表
| 記法 | 説明 |
|---|---|
問題定義と制約
中核問題の定式化とジレンマ
本論文が取り組む中核的な問題は、複雑な非平衡システムにおけるエントロピー生成と根底にある散逸力場の正確な時空間的局在化であり、これは実験的に測定された軌道データから直接導出される。
入力/現在の状態: この分析の出発点は、熱力学的な平衡から大きく外れた状態で動作するシステムの、生の、実験的に測定可能な軌道データ $\mathbf{x}(t)$ である。重要な側面は、このデータが、システムの根底にある動力学方程式(フォッカー・プランク方程式やマスター方程式など)やその解析解、あるいは特定のシステムパラメータに関する事前知識なしに利用可能であると仮定されることである。
出力/目標状態: 望ましい終着点は、システムの不可逆性に関する詳細で局在的な理解である。これには以下が含まれる:
1. 非平衡動力学の駆動力である散逸(熱力学)力場 $F(\mathbf{x},t)$。
2. 個々の軌道に沿って、空間と時間の両方で局在化された、対応するゆらぐエントロピー生成 $\sigma$。この出力により、研究者はシステム内でエネルギー散逸がいつ、どこで発生するかを特定できる。
欠落リンクと数学的ギャップ: 根本的なギャップは、生の軌道データをこれらの局在的な熱力学的量に効果的に変換することにある。歴史的に、エントロピー生成を定量化するための手法は、しばしばシステムの動力学方程式の明示的な知識に依存してきたが、これらは複雑で高次元または時間依存的なシステムでは通常未知または解析的に扱いにくい。平均エントロピー生成率の大域的な推定値を得ることはできるが、ゆらぐエントロピー生成と散逸力場の時空間構造をデータのみから抽出することは、依然として重大な課題であった。
本論文は、短時間の熱力学的不確定性関係(TUR)を変分原理として構築する。TURは、エントロピー生成率 $\sigma_{TUR}(t)$ の公式を提供し、これを最大化することで正確なエントロピー生成率 $\sigma(t)$ が得られる。極めて重要なのは、この関係を最大化する最適な係数場 $d^*(\mathbf{x},t)$ が熱力学力場 $F(\mathbf{x},t)$ に比例することが知られていることである。したがって、数学的なギャップは、この複雑で、非線形であり、高次元である可能性のある最適な係数場 $d(\mathbf{x},t)$ を軌道データから直接学習する方法である。本論文は、深層ニューラルネットワークを用いて $d(\mathbf{x},t)$ をパラメータ化し推測することで、このギャップを埋め、散逸力場と局在エントロピー生成の両方を再構築する。
ジレンマ: 歴史的に研究者を閉じ込めてきた中心的なジレンマは、エントロピー生成に関する高解像度で局在的な情報への欲求と、解析的な扱いやすさおよび計算スケーラビリティの実用的な限界との間の苦痛なトレードオフである。従来ののアプローチは、以下のいずれかであった:
* システムの動力学の明示的な知識を必要としたが、これは現実的な複雑なシステムではほとんど利用できない。
* 大域的で平均化されたエントロピー生成率しか提供できず、それゆえ時空間的な詳細をすべて失っていた。
* 総当たり統計ビン法のような、量を局在化しようとする手法は、「高次元システムにはスケールが悪く」(Page 3)、多くの実世界シナリオでは実用的でなくなった。
* 他のデータ駆動型手法は、軌道に沿ったエントロピー生成を推測するかもしれないが、「根底にある散逸力場の構造を研究していない」(Page 3)ことが多く、これは駆動力メカニズムの完全な理解に不可欠である。本論文は、局在エントロピー生成と力場の両方を提供するデータ駆動型でモデルフリーなアプローチを提供することで、これを克服することを目指す。
制約と失敗モード
実験的軌道からエントロピー生成を局在化する問題は、解決を非常に困難にする、いくつかの過酷で現実的な要因によって制約されている:
- 計算複雑性と高次元性: 生の非平衡システム、特に生物学やアクティブマターのような分野では、多数の相互作用する成分が含まれることが多く、高次元の位相空間につながる。本論文は、「高次元の多体相互作用の複雑性が、従来の最適化手法に重大な課題をもたらす」(Page 5)と明記している。このような広大な空間における複雑な非線形力場の推測は計算集約的であり、効率的にスケールしない手法ではすぐに扱いにくくなる。
- 事前動力学知識の欠如: 主要な障害は、ほとんどの現実的なシステム(Page 2)における既知の根底にある動力学方程式(例:フォッカー・プランク方程式またはマスター方程式)またはその解析解の不在である。これは、モデル推定よりも本質的に困難なモデルフリー推論アプローチを必要とする。
- 時間依存動力学: 多くの非平衡過程は明示的に時間依存的であり、熱力学力場とエントロピー生成率も時間変動量であることを意味する。この時間依存性は「直接的な推定を非常に非自明にする、重大な計算上の課題をもたらす」(Page 14)。このような動的な変化を正確に捉えるモデルのトレーニングには、堅牢なアーキテクチャと十分なデータが必要である。
- データ品質と信号対雑音比 (SNR): 実験データは本質的にノイズが多い。重要な制約は、「不可逆的な署名がゆらぎに比べて小さい」(Page 10)「弱散逸領域」に生じる。「低散逸レジーム」では、推論モデルのトレーニングのための実効SNRが「大幅に低下」し、「エントロピー生成スケールが大きく異なる自由度全体での一般化能力を制限する」。これは、図4(e)に示すように、そのような領域での推測値と理論的予測値との不一致につながる可能性がある。
- 実験的サンプリング制限: 実験的軌道のサンプリング間隔 $\Delta t$ は「実用上の制約によってしばしば固定される」(Page 5)。短時間TURは理想的には正確な飽和のために $\Delta t \to 0$ を必要とするが、実用的な $\Delta t$ 値は有限である。この手法は、これらの非理想的なサンプリングレートを処理するのに十分堅牢でなければならない。
- 粗視化と隠れた自由度: 実験的観測はしばしば「根底にある動力学の縮小された記述」(Page 16)しか提供しない。これは、「隠れた自由度」(観測されない変数)または「有限の時間分解能」(サブサンプリング)によるものである可能性がある。推論手法は、観測データが粗視化されている場合でも意味のある結果を提供できなければならず、問題に別の複雑さの層を追加する。
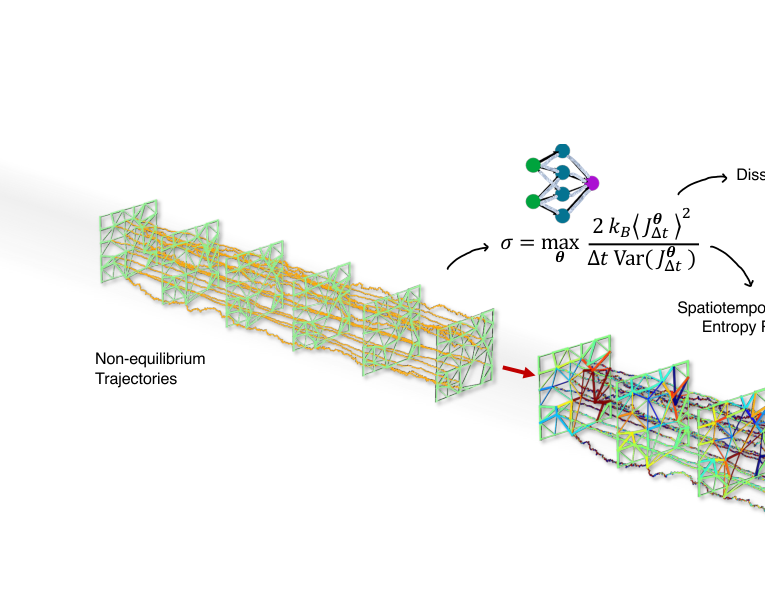 FIG. 1. Schematic of entropy production inference in an active biological network model. Input: The method processes experimentally measurable trajectory data without requiring prior knowledge of system parameters. Outputs: Using short-time Thermodynamic Uncertainty Relations and neural networks (schematically illustrated at the top with a cartoon), we simultaneously infer (i) the dissipative (thermodynamic) force field F (x, t) driving the nonequilibrium dynamics and (ii) the corresponding fluctuating entropy production (color scale: ±0.015kB/s), localized in both space and time. Here, σ denotes the local entropy production rate, and J∆t represents a generalized current in phase space
FIG. 1. Schematic of entropy production inference in an active biological network model. Input: The method processes experimentally measurable trajectory data without requiring prior knowledge of system parameters. Outputs: Using short-time Thermodynamic Uncertainty Relations and neural networks (schematically illustrated at the top with a cartoon), we simultaneously infer (i) the dissipative (thermodynamic) force field F (x, t) driving the nonequilibrium dynamics and (ii) the corresponding fluctuating entropy production (color scale: ±0.015kB/s), localized in both space and time. Here, σ denotes the local entropy production rate, and J∆t represents a generalized current in phase space
なぜこのアプローチなのか
選択の必然性
著者らが深層ニューラルネットワークと短時間熱力学的不確定性関係(TUR)に基づく推論スキームを組み合わせるという選択は、単なる任意的な選択ではなく、従来ののアプローチの固有の限界によって駆動された必然的な進化であった。著者が従来の「SOTA」手法がこの特定の問題に対して不十分であると認識した正確な瞬間は、実験データからエントロピー生成と散逸力場を直接測定することの課題について議論する際に明確に述べられている。
本論文が指摘するように、従来ののアプローチは、「フォッカー・プランク方程式やマスター方程式のような根底にある動力学方程式とその解に依存しており、これらは現実的な設定ではしばしば未知である」(Page 2)。システムの動力学の事前知識へのこの根本的な依存性は、それらの動力学方程式が複雑すぎて導出できないか、単に利用できない多くの現実世界の複雑なシステムにとって非実用的なものとなる。さらに、一部の手法は平均エントロピー生成率の大域的な推定値を提供できたが、「複雑な過程におけるそれを時空間的に局在化して定量化する」(Page 2)という重要な必要性は、主要な未解決の課題のままであった。総当たり統計ビン法のような局在化の過去の試みは、「高次元システムにはスケールが悪く」(Page 3)、スケーラビリティの欠如を示している。他の手法、例えば [23] は、軌道に沿ったエントロピー生成を学習したが、動力学を理解するために不可欠な根底にある散逸力場の構造を明らかにするのに失敗した。
著者は、特に「高次元の多体相互作用」(Page 5)における問題の複雑性が、「従来の最適化手法に重大な課題をもたらす」(Page 5)ことを認識した。これは決定的な認識である。既存の手法、分析的手法またはより単純な統計的手法のいずれであっても、システムの支配的な方程式の事前知識なしに、データ駆動型でスケーラブルかつ高次元の方法で、局在エントロピー生成と散逸力場の両方を同時に推測することはできなかった。短時間TURは、エントロピー生成率の変分表現を提供し、それを散逸力場に直接結びつける(Eq. 9)が、理論的基盤を提供した。しかし、複雑で高次元のシステムに対してこの変分問題を実用的に解くためには、強力な関数近似器が不可欠であり、深層ニューラルネットワークの採用に直接つながった。
比較優位性
この組み合わせアプローチは、単純なパフォーマンス指標をはるかに超えて、従来のゴールドスタンダードに対する圧倒的な質的優位性を示している。構造的な利点は、根底にある動力学方程式の明示的な知識なしに、複雑で高次元、そして潜在的に時間依存的な散逸力場をモデル化する能力にある。
- モデルフリー推論: フォッカー・プランク方程式やマスター方程式のような明示的な動力学方程式を要求する従来ののアプローチとは異なり、このフレームワークは「プロセスの明示的な動力学的記述への依存性を排除する」(Page 6)。これは、そのような方程式がしばしば扱いにくいか未知である実験データにとって、重大な利点である。
- 高次元へのスケーラビリティ: 総当たりビン法 [20] のようなエントロピー生成を局在化する過去の試みは、「高次元システムにはスケールが悪く」(Page 3)。深層ニューラルネットワークは、「複雑で高次元の関数を近似することに優れている」(Page 5)ため、提案された手法は、「異なる自由度間に非自明な相互作用を持つシステムにおけるエントロピー生成の解析のためのスケーラブルなソリューション」(Page 6)を提供する。これは、高次元ノイズと複雑な相互作用の課題に直接対処する。
- 散逸力の時空間局在化: この手法は、大域的なエントロピー生成率を推測するだけでなく、極めて重要なことに、「高次元で潜在的に時間依存的な散逸力場」を再構築し、「非平衡経路に沿って空間と時間の両方でゆらぐエントロピー生成」を局在化する(Page 2)。これは、以前の大域的推定技術ではほとんど欠けていた、不可逆性の詳細で物理的に解釈可能な理解を提供する。
- 時間的滑らかさと一般化(時間依存システムの場合): 時間依存動力学の場合、ニューラルネットワークアーキテクチャは時間も入力として受け入れるように拡張される。これは「共有ネットワークパラメータを通じて時間的滑らかさを強制し、観測されていない時間への一般化を可能にし、時間領域全体にわたるデータを効率的に活用する」(Page 6-7)。これは、各離散時間点に対して個別のモデルをトレーニングするよりも、計算コストが高く過学習しやすいよりも、重大な質的改善である。
- 堅牢性と広範な適用性: この手法は、「広範なハイパーパラメータ調整なしにすべての例で堅牢に機能する単一のニューラルネットワークアーキテクチャに依存しており、実用上広く適用可能である」(Page 4)。これは、結果で実証されているように、多様なシステム(定常、非定常、線形、非線形、低次元および高次元)を処理できる、堅牢で一般化可能なフレームワークを示唆している。
制約との整合性
選択された手法は、問題の暗黙的および明示的な制約と完全に整合し、「過酷な要件とソリューションのユニークなプロパティとの結婚」を形成する。
- データ駆動型要件: 主要な制約は、「システムパラメータ」や「根底にある動力学方程式」の事前知識を必要とせずに、「実験データから直接」エントロピー生成を推測することである(Page 2, Figure 1)。短時間TURとニューラルネットワークの組み合わせは、本質的にデータ駆動型である。これは「実験的に測定可能な軌道データ」を入力として受け取り、そこから力場とエントロピー生成を学習し、明示的なモデル方程式の必要性を回避する。
- 時空間局在化: 中核的な問題は、「複雑な過程におけるそれを[エントロピー生成を]時空間的に局在化して定量化する」ことである(Page 2)。この手法は、「散逸(熱力学)力場 $F(\mathbf{x},t)$」と「空間と時間の両方で局在化された対応するゆらぐエントロピー生成...」(Figure 1, Page 3)を推測することで、これを直接解決する。ニューラルネットワークによって最適化されたTURの変分原理は、力場 $F(\mathbf{x},t)$ を生成し、これは軌道増分と縮約されると、局在エントロピー生成 $dS(t) = F(\mathbf{x}(t), t) \circ dx(t)$ (Eq. 7)を与える。
- 高次元性と複雑性の処理: 問題は、「複雑な過程」と「高次元の多体相互作用」(Page 2, 5)を含む。深層ニューラルネットワークは、「複雑で高次元の関数を近似することに優れている」(Page 5)ため、特に選択されている。これにより、モデルは高次元位相空間における力場の複雑で非線形な依存性を捉えることができ、従来のの手法がスケールが悪いために失敗したタスクである。
- 非平衡動力学(定常および時間依存): この手法は、「平衡から大きく外れた状態で動作するシステム」(Page 2)のために設計されている。短時間TURは、定常および時間依存的に駆動される両方のケースで有効であることが証明されている [21, 22]。ニューラルネットワークアーキテクチャは、非定常プロセスに時間も入力として含めるように適応されており、さまざまな非平衡シナリオにわたる適用性を保証する。
- 実験データからの堅牢性: このフレームワークは、「実験的に扱える観測」(Page 2)からの堅牢な推論を目指している。「広範なハイパーパラメータ調整なし」(Page 4)の単一の堅牢なニューラルネットワークアーキテクチャの使用は、それを実用的で広く適用可能にし、複雑なモデルに関連する脆弱性を減らし、実際の実験ノイズでも信頼性の高い結果を保証する。
代替案の却下
本論文は、その限界を問題の文脈で強調することによって、いくつかの代替アプローチを暗黙的および明示的に却下している。
- 従来の解析/方程式ベースの手法: 「フォッカー・プランク方程式やマスター方程式のような根底にある動力学方程式とその解の知識に依存する」(Page 2)手法の最も重大な却下である。これらの手法は、「現実的な設定ではしばしば未知であり」(Page 2, 5)「解析的に扱える限られた数」(Page 2, 5)の場合にのみ利用可能であるため、不十分と見なされる。提案されたデータ駆動型でモデルフリーなアプローチは、この根本的な限界を直接回避する。
- 大域的エントロピー生成推定器: 原田・笹の等式 [6]、定常状態電流/確率分布法 [5]、時間不可逆性尺度 [26-31]、経路確率推定器 [4, 32, 33]、および分散和規則(VSR)[13] を含む多くの既存の手法は、主に「平均エントロピー生成率の大域的推定値の取得」(Page 3)に焦点を当てている。これらは価値があるが、この作業の中心目標である、エントロピー生成と根底にある散逸力場の「時空間局在化」を提供できない。
- 総当たり統計ビン法: 本論文は、熱力学力場を推定するために開発された総当たり統計ビン法 [20] が「高次元システムにはスケールが悪く」(Page 3)なることを特に言及している。これは、著者らが分析したい複雑で高次元のシステムには不適切なスケーラビリティの問題を浮き彫りにする。対照的に、ニューラルネットワークアプローチは、そのような複雑性を効率的に処理するように設計されている。
- 部分推論手法: 直接軌道に沿ってエントロピー生成を学習する [23] のようなアプローチは、「根底にある散逸力場の構造を研究していない」(Page 3)ことで注目されている。同様に、「残りの成分が事前に既知であると仮定して」([11, 40])散逸力場の「一部」しか推測できない手法は、力場全体の包括的でモデルフリーな理解には不十分である。提案された手法は、力場の完全な推測を目指す。
- その他の機械学習モデル(暗黙的): GANや基本的なTransformerのような他のMLモデルを明示的に却下しているわけではないが、深層ニューラルネットワークアーキテクチャ、特にDeep-Ritzに触発されたモデルの選択は、「複雑で高次元の関数を近似することに優れている」という証明された能力と、「最適制御技術」および「希少イベントの効率的なサンプリング」における成功 [52, 53](Page 5)によって動機づけられている。これは、特に高次元力場の正確な再構築の必要性を考えると、単純またはあまり専門化されていないMLアーキテクチャが、この特定の変分最適化問題のパラメータ空間を探索する上で、同じレベルの柔軟性、堅牢性、または効率を提供しない可能性を示唆している。選択されたネットワークの加法構造は「層間で情報を保持し、トレーニングを安定させる」(Page 5)ことも、潜在的に不安定な代替案よりも慎重な選択を示唆している。
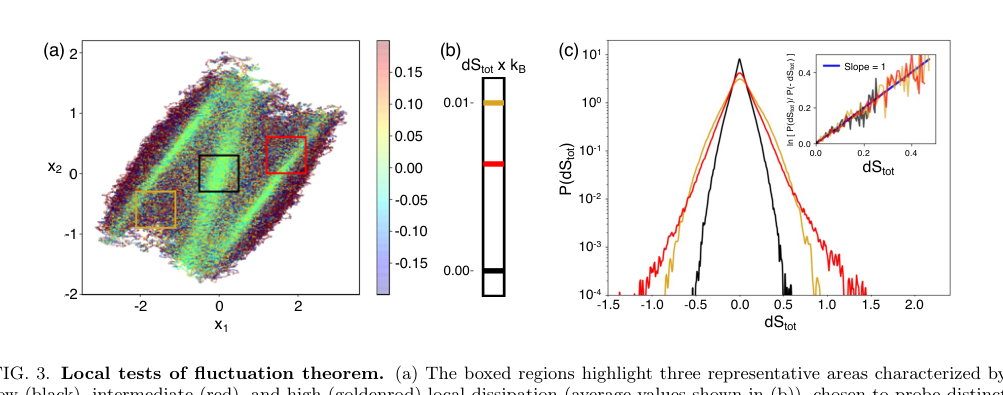 FIG. 3. Local tests of fluctuation theorem. (a) The boxed regions highlight three representative areas characterized by low (black), intermediate (red), and high (goldenrod) local dissipation (average values shown in (b)), chosen to probe distinct dynamical environments. (c) Probability distributions P(dStot) conditioned on these regions, illustrating pronounced region- dependent differences in the statistics of entropy production. The low-dissipation region exhibit narrow, nearly symmetric distributions, while higher-dissipation regions display broader, strongly skewed distributions with extended tails. The inset shows the corresponding fluctuation ratios ln[P(dStot)/P(−dStot)] as a function of dStot, demonstrating that each region independently satisfies a local fluctuation theorem with unit slope
FIG. 3. Local tests of fluctuation theorem. (a) The boxed regions highlight three representative areas characterized by low (black), intermediate (red), and high (goldenrod) local dissipation (average values shown in (b)), chosen to probe distinct dynamical environments. (c) Probability distributions P(dStot) conditioned on these regions, illustrating pronounced region- dependent differences in the statistics of entropy production. The low-dissipation region exhibit narrow, nearly symmetric distributions, while higher-dissipation regions display broader, strongly skewed distributions with extended tails. The inset shows the corresponding fluctuation ratios ln[P(dStot)/P(−dStot)] as a function of dStot, demonstrating that each region independently satisfies a local fluctuation theorem with unit slope
数学的・論理的メカニズム
マスター方程式
本論文のアプローチの中核となる数学的エンジンは、短時間熱力学的不確定性関係(TUR)から導出されたエントロピー生成率の変分表現である。定常非平衡過程の場合、モデルがトレーニング中に最大化しようとする目的関数は次のように与えられる:
$$ f(\theta)_{\text{train}} = \frac{2k_B \langle J_{\Delta t}^\theta \rangle^2}{\Delta t \text{Var}(J_{\Delta t}^\theta)} $$
時間依存動力学の場合、この目的は、サンプリングされた時間点 $\{t_k\}$ のミニバッチ全体に集約するように拡張される:
$$ f(\theta) = \sum_{k=1}^{\text{batch\_size}} \frac{2k_B \langle J_{\Delta t,k}^\theta \rangle^2}{\Delta t \text{Var}(J_{\Delta t,k}^\theta)} $$
この方程式は本質的に、ゆらぎとその平均流との関係によって、システム不可逆過程の効率を定量化する。この量の最大化は、根底にある散逸力場、ひいては局在エントロピー生成の推測を可能にする。
項ごとの解剖
定常過程のための主要な目的関数 $f(\theta)_{\text{train}}$ を分解して、各成分を理解しよう:
-
$f(\theta)_{\text{train}}$:
1) 数学的定義: これは、学習アルゴリズムがトレーニングフェーズ中に最大化しようとする目的関数である。これは、推定されたエントロピー生成率を表すスカラー値である。
2) 物理的・論理的役割: その値は、与えられたモデルパラメータ $\theta$ のセットに対する推定エントロピー生成率に直接対応する。最適化の目標は、最大可能な値をもたらす $\theta$ を見つけることである。これは、TURによれば、真のエントロピー生成率に対応する。
3) この形式である理由: これは、エントロピー生成を推測するために最大化される、短時間TURから導出された量である。 -
$k_B$:
1) 数学的定義: ボルツマン定数。本論文では簡略化のために $k_B = 1$ と明記している。
2) 物理的・論理的役割: 熱的ゆらぎの自然なエネルギー尺度を提供し、温度とエネルギーを関連付ける基本的な物理定数。この文脈では、エントロピー生成の単位が(例えば、$k_B/s$ の単位で)一貫していることを保証する。それを1に設定することは、エントロピーを $k_B$ の単位で効果的に正規化する。
3) この形式である理由: これは演算子ではなく定数スケーリング因子である。 -
$\langle J_{\Delta t}^\theta \rangle$:
1) 数学的定義: これは、一般化電流 $J_{\Delta t}^\theta$ のアンサンブル平均(期待値)を示す。一般化電流自体は、$J_{\Delta t}^\theta = d(x_{t+\Delta t/2}; \theta) \circ (x_{t+\Delta t} - x_t)$ と定義され、ここで $d(x; \theta)$ はパラメータ化された散逸力場であり、$\circ$ はストラトノビッチ積を表す。
2) 物理的・論理的役割: この項は、短い時間間隔 $\Delta t$ にわたる推測力場 $d(x; \theta)$ によって指示される位相空間における平均「流れ」または「ドリフト」を表す。非ゼロの平均電流は、熱力学的な平衡から外れた状態で動作するシステムの直接的な指標であり、エネルギー散逸と本質的に結びついている。
3) 山括弧である理由: 山括弧 $\langle \dots \rangle$ は、アンサンブル平均の標準的な記法であり、確率によって重み付けされたすべての可能な電流の実現に対して合計または積分することを含む。これは、統計的に堅牢な平均値を得るために不可欠である。 -
$(\dots)^2$:
1) 数学的定義: この操作は、一般化電流のアンサンブル平均を二乗する。
2) 物理的・論理的役割: 二乗することで、平均電流の目的関数への寄与が、電流の方向に関わらず常に正になることが保証される。さらに重要なのは、より大きな平均電流に二次的な強調を与えることであり、これは平衡からより遠く駆動され、したがってより多くエントロピーを生成するシステムの特性である。
3) 二乗である理由: TURの数学的形態は、分子に二乗平均電流を要求しており、平均電流に対する二次依存性を反映している。 -
$\Delta t$:
1) 数学的定義: これは、システムの軌道を記録するために使用される離散サンプリング間隔またはステップサイズである。
2) 物理的・論理的役割: これは、一般化電流が計算される短い期間を表す。TURの「短時間」極限は、エントロピー生成率の正確な推定値を提供するために重要である。分母では、これは $\Delta t$ にわたる合計電流を時間あたりの率に変換するスケーリング因子として機能する。
3) 除算である理由: $\Delta t$ で除算することにより、間隔全体で蓄積された合計電流が率に変換され、エントロピー生成率の定義と一致する。 -
$\text{Var}(J_{\Delta t}^\theta)$:
1) 数学的定義: これは、一般化電流 $J_{\Delta t}^\theta$ の分散であり、$\text{Var}(X) = \langle X^2 \rangle - \langle X \rangle^2$ と定義される。
2) 物理的・論理的役割: この項は、平均一般化電流の周りのゆらぎまたは不確実性を定量化する。TURの文脈では、与えられた平均電流に対する分散が小さいほど、「確実」またはノイズの少ないプロセスを意味し、より高い推定エントロピー生成率につながる。これは、過度のゆらぎに対するペナルティとして機能し、エントロピー生成推定値の信頼性を低下させる。
3) 分母にある理由: TURは、エントロピー生成と電流の相対的なゆらぎとの逆の関係を確立する。分散を分母に置くことは、この基本的な境界を反映している。 -
$\max_{\theta}$:
1) 数学的定義: これは最大化演算子であり、目的関数 $f(\theta)_{\text{train}}$ がパラメータセット $\theta$ に関して最適化されることを示す。
2) 物理的・論理的役割: これは推論スキームの中心的なメカニズムである。アルゴリズムは、目的関数を最大化するパラメータ $\theta$ の特定のセット(散逸力場 $d(x;\theta)$ を定義する)を積極的に検索する。TURに根ざしたこの最大化原理により、モデルはシステムの非平衡動力学とその関連エントロピー生成を最も正確に記述する「最適な」力場を特定できる。
3) 最大化である理由: TURはエントロピー生成の下限を提供する。この特定の比率を最大化することにより、手法はこの境界を飽和させる電流を見つけることを目指し、それによって正確なエントロピー生成率が得られる。
ステップバイステップフロー
単一の抽象的なデータポイント、この文脈では粒子の軌道の短いセグメントが、数学的エンジンを通過する様子を想像してください:
- 軌道セグメント入力: プロセスは入力から始まります。これは、非平衡軌道からサンプリングされた粒子 $x_t$ と $x_{t+\Delta t}$ の連続する2つの位置です。これは時間 $t$ における粒子の状態と、その後の短い時間 $\Delta t$ を表します。
- 中間点計算: まず、システムはこのセグメントの中間点 $x_{\text{mid}} = (x_t + x_{t+\Delta t})/2$ を計算します。この中間点は、間隔の代表的な位置として機能します。
- 変位計算: 同時に、このセグメントの変位ベクトル $\Delta x = x_{t+\Delta t} - x_t$ が計算されます。このベクトルは、粒子がどれだけ、どの方向に移動したかを示します。
- 力場推測(ニューラルネットワークフォワードパス): 計算された中間点 $x_{\text{mid}}$ が、パラメータ化された散逸力場 $d(x;\theta)$ を表すニューラルネットワークに供給されます。現在の内部重みとバイアス(パラメータ $\theta$)を使用して、ネットワークはフォワードパスを実行し、$x_{\text{mid}}$ を出力ベクトル $d(x_{\text{mid}}; \theta)$ に変換します。この出力は、その位置と時間で作用する熱力学的な力に対するモデルの現在の推定値です。
- 一般化電流計算: 推測された力場 $d(x_{\text{mid}}; \theta)$ は、変位 $\Delta x$ とストラトノビッチ積(この文脈では実質的に内積)を使用して、この特定のセグメントの一般化電流 $J_{\Delta t}^\theta = d(x_{\text{mid}}; \theta) \cdot \Delta x$ を計算するために組み合わされます。この値は、推測された力に沿って粒子の経路で行われた「仕事」を定量化します。
- バッチ蓄積: このシーケンス全体(ステップ1〜5)が、このような多くの軌道セグメントに対して繰り返され、$J_{\Delta t}^\theta$ 値の「バッチ」が形成されます。
- 統計的集計: $J_{\Delta t}^\theta$ 値のバッチが蓄積されると、システムはそのアンサンブル平均 $\langle J_{\Delta t}^\theta \rangle$ と分散 $\text{Var}(J_{\Delta t}^\theta)$ を計算します。これらの統計的尺度は、バッチ全体にわたる平均の流れとそのゆらぎを要約します。
- 目的関数評価: 最後に、これらの計算された平均値と分散値がマスター方程式(例:$f(\theta)_{\text{train}}$)にプラグインされ、単一のスカラー値が計算されます。この値は、現在の力場パラメータ $\theta$ がTURに従ってエントロピー生成率を推定する上でどれだけうまく機能しているかを示します。これにより、評価のための1回の完全なパスが完了します。
最適化ダイナミクス
メカニズムは、勾配上昇法を通じてニューラルネットワークの内部パラメータ $\theta$ を反復的に洗練させることによって学習および収束し、目的関数 $f(\theta)_{\text{train}}$ (または時間依存の場合は $f(\theta)$)を最大化することを目指す。
-
損失ランドスケープ: 目的関数 $f(\theta)$ は、パラメータ $\theta$ の高次元空間における複雑な「損失ランドスケープ」を定義する。多くの機械学習タスクが損失関数を最小化するのとは異なり、ここでは損失ランドスケープのピークを見つけることが目標であり、$f(\theta)$ の値が高いほど、エントロピー生成の正確な推測を意味する。深層ニューラルネットワークの非線形性と統計的操作(平均と分散)により、このランドスケープは複雑になる。
-
勾配上昇: トレーニングプロセスの各ステップで、アルゴリズムは目的関数を $\theta$ のすべてのパラメータに対する勾配、すなわち $\nabla_\theta f(\theta)_{\text{train}}$ と計算する。この勾配ベクトルは、損失ランドスケープ上の目的関数の最も急な増加の方向を指す。
-
パラメータ更新: パラメータ $\theta$ は、この正の勾配の方向にステップを踏むことによって更新される。このステップのサイズは、「学習率」ハイパーパラメータ(lr)によって制御される。更新ルールは通常次のようになる:
$$ \theta_{\text{new}} = \theta_{\text{old}} + \text{lr} \cdot \nabla_\theta f(\theta)_{\text{train}} $$
この反復的な調整により、パラメータは目的関数を最大化する構成に徐々に移動し、それによって真の熱力学力場の近似が改善される。 -
収束と一般化:
- 収束: トレーニングループは継続され、各イテレーションでパラメータが更新される。パラメータ $\theta$ が洗練されるにつれて、推測された力場 $d(x;\theta)$ は、実際の熱力学力場 $F(x,t)$ のますます優れた表現になる。これにより、目的関数の値が増加し、モデルがエントロピー生成率のより正確な推定値に収束していることを示す。
- 過学習管理: 最適化の重要な側面は、特にデータが限られている場合の過学習を防ぐことである。本論文では、中間パラメータセットが最終的な完全に収束したモデルよりも、未知のデータに対してより良く機能する場合があると指摘している。これを解決するために、アルゴリズムはトレーニング中に中間パラメータセット $\{\theta_m\}$ を保存する。メインのトレーニングループの後、これらの保存されたすべてのモデルが、別の、保持された検証データセットで評価される。最終的な最適なパラメータ $\theta^*$ は、この検証セットで目的関数値が最大になるものとして選択され、モデルがトレーニングデータを超えてうまく一般化することを保証する。大規模データセットの場合、著者らは過学習が無視できるようになり、トレーニング最適モデルも検証データで最適に機能すると観察している。
-
時間依存拡張: 時間依存動力学を持つシステムの場合、ニューラルネットワークは時間 $t$ を追加の入力として受け入れるように設計されている。目的関数(Eq. 17)は、サンプリングされた時間点のミニバッチ全体で平均化することによって計算される。この定式化により、ネットワークは時間依存力場を学習しながら、共有ネットワークパラメータを通じて時間的滑らかさを強制し、観測されていない時間への一般化と時間領域全体にわたる効率的なデータ利用を可能にする。 $\theta$ を更新するための基本的な勾配上昇メカニズムは同じであるが、それはこの時間集約目的関数上で動作する。この反復プロセスにより、メカニズムがエントロピー生成がどのように発生し、システムの状態が時間とともにどのように更新されるかを効果的に学習することが保証される。
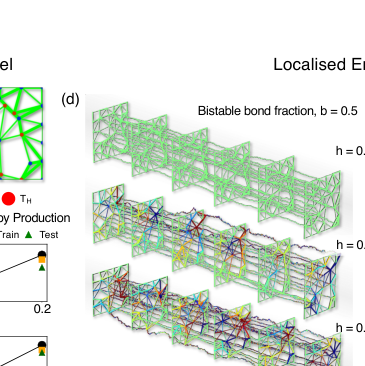 FIG. 5. Entropy production and finite-time fluctuations in active–bistable mechanical networks. (a) Example disordered two-dimensional spring network with a fraction of hot nodes (red, temperature Thot) and cold nodes (blue, Tcold). Thin green bonds denote linear springs, while thick green bonds indicate bistable springs. (b,c) Average entropy production rate as a function of the fraction of hot nodes h at fixed bistable bond fraction b = 0.5 (b), and as a function of the bistable bond fraction b at fixed h = 0.2 (c). Symbols show inferred values from training and test data, while solid lines indicate theoretical predictions for the total entropy production rate. (d) Spatial maps of the inferred local entropy production rate for increasing hot-node fraction h at fixed b = 0.5. (e) Spatial maps of the inferred local entropy production rate for increasing bistable bond fraction b at fixed h = 0.2. In (d) and (e), the network bonds are colored by the mean value of dissipation of the two nodes in the bond. Additionally, the time-series corresponds to 1000 consecutive steady state configurations. (f) Skewness of the time-integrated entropy production ∆Stot as a function of the integration time t for different bistable bond fractions b, showing a pronounced nonmonotonic dependence. (g) Fraction of time-integrated entropy production fluctuations lying above the mean, ⟨T+(t)⟩= P(∆Stot > ⟨∆Stot⟩), demonstrating a finite-time bias with ⟨T+(t)⟩< 1/2. (h) Characteristic integration time t∗at which the skewness is maximal, as a function of the bistable bond fraction b. Increasing the fraction of bistable bonds systematically amplifies finite-time asymmetries in cumulative entropy production and shifts the characteristic timescale to shorter values, demonstrating that mechanical nonlinearity enhances emergent non-Gaussian entropy production statistics at experimentally relevant finite times
FIG. 5. Entropy production and finite-time fluctuations in active–bistable mechanical networks. (a) Example disordered two-dimensional spring network with a fraction of hot nodes (red, temperature Thot) and cold nodes (blue, Tcold). Thin green bonds denote linear springs, while thick green bonds indicate bistable springs. (b,c) Average entropy production rate as a function of the fraction of hot nodes h at fixed bistable bond fraction b = 0.5 (b), and as a function of the bistable bond fraction b at fixed h = 0.2 (c). Symbols show inferred values from training and test data, while solid lines indicate theoretical predictions for the total entropy production rate. (d) Spatial maps of the inferred local entropy production rate for increasing hot-node fraction h at fixed b = 0.5. (e) Spatial maps of the inferred local entropy production rate for increasing bistable bond fraction b at fixed h = 0.2. In (d) and (e), the network bonds are colored by the mean value of dissipation of the two nodes in the bond. Additionally, the time-series corresponds to 1000 consecutive steady state configurations. (f) Skewness of the time-integrated entropy production ∆Stot as a function of the integration time t for different bistable bond fractions b, showing a pronounced nonmonotonic dependence. (g) Fraction of time-integrated entropy production fluctuations lying above the mean, ⟨T+(t)⟩= P(∆Stot > ⟨∆Stot⟩), demonstrating a finite-time bias with ⟨T+(t)⟩< 1/2. (h) Characteristic integration time t∗at which the skewness is maximal, as a function of the bistable bond fraction b. Increasing the fraction of bistable bonds systematically amplifies finite-time asymmetries in cumulative entropy production and shifts the characteristic timescale to shorter values, demonstrating that mechanical nonlinearity enhances emergent non-Gaussian entropy production statistics at experimentally relevant finite times
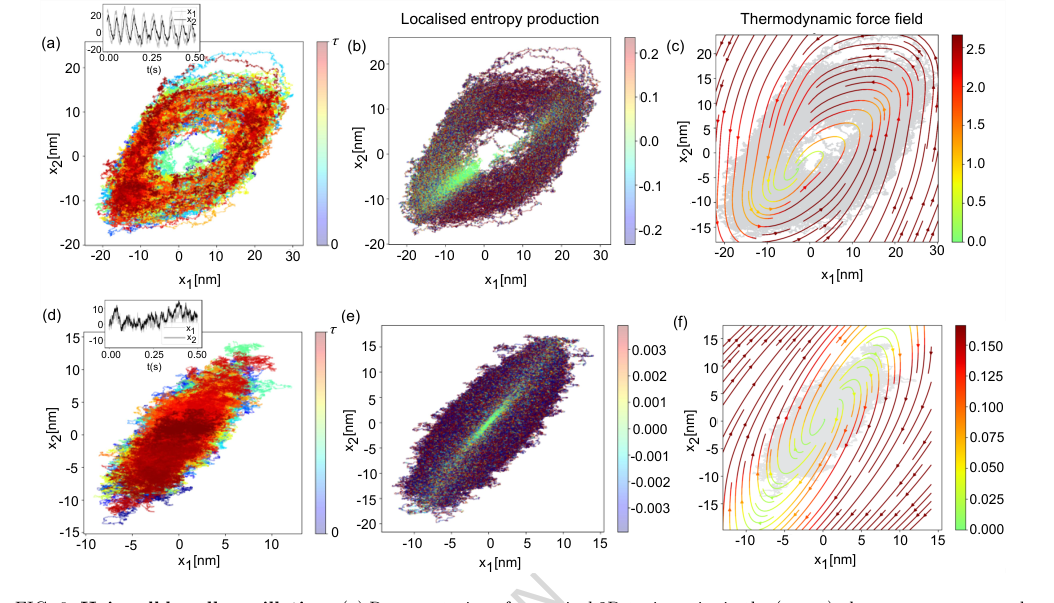 FIG. 6. Hair-cell bundle oscillation. (a) Representation of numerical 2D-trajectories in the (x1, x2) phase space correspond- ing to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the oscillatory nature of dynamics for Fmax = 57.14 pN and S = 0.94. (b) The local entropy production rate (in units of kB/s) is computed using the neural network representation. It captures the active state of dynamics. The colours are for comparative visualisation and do not represent the true value. (c) Thermodynamic force field of the oscillatory state of the dynamics. (d) Representation of numerical 2D-trajectories in the (x1, x2) phase space corresponding to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the quiescent (non-oscillatory) state of dynamics for Fmax = 40 pN and S = 1. (e) Entropy production rate (in units of kB/s) is locally computed along such trajectories. The colours are for comparative visualisation and do not represent the true value. (f) Thermodynamic force field of the oscillatory state of the dynamics. The colour scale of local entropy production is thresholded symmetrically between [−10× median, 10 × median] for the oscillatory case and [−500 × median, 500× median] for the quiescent case, while the colour scale for the force field of both cases is thresholded between [0, median]. The other system parameters remain the same as mentioned in Fig.(4) of Ref. [12]: γ1 = 2.8 µN s/m, γ2 = 10 µN s/m, kgs = 0.75 pN/nm, ksp = 0.6 pN/nm, D = 61 nm, N = 50, ∆G = 10kBT, kBT = 4.143 pNnm and Teff = 1.5T
FIG. 6. Hair-cell bundle oscillation. (a) Representation of numerical 2D-trajectories in the (x1, x2) phase space correspond- ing to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the oscillatory nature of dynamics for Fmax = 57.14 pN and S = 0.94. (b) The local entropy production rate (in units of kB/s) is computed using the neural network representation. It captures the active state of dynamics. The colours are for comparative visualisation and do not represent the true value. (c) Thermodynamic force field of the oscillatory state of the dynamics. (d) Representation of numerical 2D-trajectories in the (x1, x2) phase space corresponding to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the quiescent (non-oscillatory) state of dynamics for Fmax = 40 pN and S = 1. (e) Entropy production rate (in units of kB/s) is locally computed along such trajectories. The colours are for comparative visualisation and do not represent the true value. (f) Thermodynamic force field of the oscillatory state of the dynamics. The colour scale of local entropy production is thresholded symmetrically between [−10× median, 10 × median] for the oscillatory case and [−500 × median, 500× median] for the quiescent case, while the colour scale for the force field of both cases is thresholded between [0, median]. The other system parameters remain the same as mentioned in Fig.(4) of Ref. [12]: γ1 = 2.8 µN s/m, γ2 = 10 µN s/m, kgs = 0.75 pN/nm, ksp = 0.6 pN/nm, D = 61 nm, N = 50, ∆G = 10kBT, kBT = 4.143 pNnm and Teff = 1.5T
結果、限界、結論
実験設計とベースライン
著者らの数学的主張を徹底的に証明するためのアプローチは、短時間熱力学的不確定性関係(TUR)推論スキームと深層ニューラルネットワークを組み合わせたデータ駆動型フレームワークを中心に展開されている。主要な実験設計は以下を含む:
-
数学的基盤: この手法は、TURから導出された変分目的関数を最大化することにより、散逸(熱力学)力場 $F(x,t)$ と対応するゆらぐエントロピー生成 $\sigma$ を推測することを目的とする。具体的には、目的は $\sigma_{TUR}(t) := \max_{d} \frac{1}{\Delta t} \frac{2 \langle J_{\Delta t}^d \rangle^2}{\text{Var}(J_{\Delta t}^d)}$ を最大化することである。この定式化により、システムの根底にある動力学方程式の事前知識なしに推測が可能になる。
-
機械学習アーキテクチャ: 多層ニューラルネットワークが、熱力学力場 $F(x,t)$ に比例する最適な係数場 $d(x,t)$ を近似するために採用される。時間依存過程の場合、ネットワークは時間 $t$ も追加入力として受け入れるように拡張され、トレーニング目的は時間的滑らかさを強制し、一般化を可能にするためにサンプリングされた時間点のミニバッチ全体に集約される。
-
データ生成と検証: 様々なシステムに対して数値軌道が生成される。定常過程の場合、軌道はトレーニングセットと検証セットに分割される。パラメータはトレーニングデータ上の勾配上昇法によって最適化され、最終モデルは過学習を防ぐために保持された検証データでのパフォーマンスに基づいて選択される。
このアプローチが打ち負かすように設計され、そのパフォーマンスが評価された「犠牲者」(ベースラインモデルまたは挑戦的なシナリオ)には以下が含まれる:
- 解析的に扱えるシステム: 熱力学力場とエントロピー生成が解析的に既知であるシステム(例:調和ブラウン運動ジャイレーター、N次元線形ジャイレーター、粗視化線形ジャイレーター)の場合、推測された結果はこれらの理論的ベンチマークと直接比較される。これは決定的な定量的検証を提供する。
- 複雑な非線形システム: 解析解が扱いにくいか、事前に予測が困難なシステム(例:非調和ブラウン運動ジャイレーター、アクティブ双安定機械ネットワーク、ヘアセルバンドル振動)では、散逸の物理的に直感的で一貫した時空間構造を明らかにする手法の能力が実証される。これらのシステムは、明示的な動力学方程式に依存する従来のの手法にとって課題となる。
- 時間依存過程: 明示的に時間依存的な非平衡過程であるビット消去プロトコルは、時間変動力場とエントロピー生成率を扱う手法の能力をテストするためのテストベッドとして機能する。これは、従来ののアプローチにとって計算上困難である。
- 観測アクセス制限: 3Dジャイレーターに対する粗視化実験(次元および時間)は、部分的な軌道データまたはサブサンプリングされた軌道データのみが利用可能な場合の、手法の堅牢性をテストし、現実的な実験上の制約(隠れた自由度または有限サンプリングレート)を模倣する。
証拠が証明すること
本論文で提示された証拠は、中核的なメカニズム—短時間TURと深層ニューラルネットワークをデータ駆動型推論に組み合わせること—が、非平衡経路に沿ってエントロピー生成を局在化し、散逸力場を再構築することに成功したことを決定的に証明している。
-
正確な力場とエントロピー生成推測:
-
ブラウン運動ジャイレーター: 2Dジャイレーター(Figure 2)の場合、この手法は局在エントロピー生成率と熱力学力場の両方を正確に推測する。調和の場合、推測された力場の大きさはポテンシャル最小値の近くで最小であり、理論的に期待されるように、ほぼゼロのエントロピー生成と相関している。非線形非調和および四次ジャイレーターの場合、この手法は、このデータ駆動型アプローチなしでは予測が非常に困難な、散逸の複雑で非自明な時空間構造(例:四次の4つの渦、Figure 2(i))を明らかにする。
-
N次元ジャイレーター (N=100): 推測された局在エントロピー生成率は、解析的推定値(Figures 4(b) および 4(c))と良好な視覚的合意を示す。定量的に、推測値と解析的総エントロピー生成を比較する散布図は、$R^2$ 値が0.7576(Figure 4(d))となり、特に高散逸レジームでは強い線形相関を示している。これは、この手法がスケールし、高次元で正確に機能する能力の否定できない証拠である。
-
アクティブ双安定機械ネットワーク: 推測された平均エントロピー生成率(Figures 5(b) および 5(c) のシンボル)は、ホットノードの割合と双安定結合の割合の変動にわたって、理論的予測(実線)と驚くほどよく一致する。局在エントロピー生成の空間マップ(Figures 5(d) および 5(e))は、散逸がどのように不均一に組織化されているかを明確に示しており、相互作用する複雑なシステムにおける手法の能力を証明している。
- ヘアセルバンドル振動: この手法は、振動状態と静止状態の両方(Figures 6(b,c,e,f))に対して局在エントロピー生成と熱力学力場を正常に計算し、アクティブな動力学を捉え、異なる動力学的レジームを区別する。例えば、振動状態における強い循環力場は、強い不可逆性の明確な署名である。
- ビット消去プロトコル: 時間依存ビット消去の場合、この手法は個々の軌道に沿って局在エントロピー生成(Figures 7(d) および 7(f))を解決し、不可逆動力学に直接起因するバーストと抑制を示す。時間平均エントロピー生成率(Figures 8(a) および 8(b))はこれらの観察を裏付け、異なる消去経路の明確な特徴を強調している。
-
-
堅牢性と基本物理学との整合性:
- 局在ゆらぎ定理: 重要な証拠は、推測された局在エントロピー生成がゆらぎ定理を満たすことのデモンストレーションである。局在エントロピー生成の確率分布の局所的な違いが著しいにもかかわらず、Figure 3(c) のインセットは、ゆらぎ比 $\ln[P(dS_{tot})/P(-dS_{tot})]$ が、サンプリングされたすべての領域にわたって単位勾配を持つ $dS_{tot}$ との線形関係を示すことを示している。これは、推測された量の物理的一貫性に対する強力なデータ駆動型検証である。
- 粗視化堅牢性: この手法は、観測アクセスが制限されていても堅牢であることが証明されている。3Dジャイレーターが次元および時間的粗視化を受けた場合、推測されたゆらぐエントロピー生成率は、理論的ベンチマーク(Figures 9(b) および 9(d))とよく一致する。散布図は、$R^2$ 値が0.862および0.890(Figures 9(c) および 9(e))で強い線形相関を示しており、この手法が隠れた自由度またはサブサンプリングされたデータでも統計的に一貫した結果を提供することを確認している。
要するに、本論文は、その中核的なメカニズムが実際に機能することを、以下のことによって決定的に否定できない証拠を提供している:
* 既知の解析解との高い定量的一致を達成する。
* 解析解が入手できない複雑な非線形システムにおいて、物理的に一貫した解釈可能な時空間パターンを明らかにする。
* 局所的なレベルで、ゆらぎ定理のような基本的な熱力学的原理への準拠を示す。
* 様々な形態のデータ粗視化の下での堅牢性と統計的一貫性を示す。
「犠牲者」は確かに敗北した。なぜなら、提案された手法は、事前知識を必要とする、高次元に苦労する、または局在化された軌道解決されたエントロピー生成と散逸力の洞察を提供できない、といった従来ののアプローチの限界を克服するからである。
限界と将来の方向性
提示されたフレームワークは非平衡システムを理解するための強力な新しいレンズを提供するが、その現在の限界を認め、将来の開発のためのエキサイティングな方向性を考慮することが重要である。
限界:
- 低散逸レジームでのパフォーマンス: 本論文は、高次元システムの場合、推測精度が弱散逸領域(Figure 4(e) インセット)で低下する可能性があることを指摘している。これは、実効信号対雑音比の低下に起因し、ニューラルネットワークが非常に異なるエントロピー生成スケール全体で均一に一般化することをより困難にする。これらの困難な領域での堅牢性の向上は、未解決の問題のままである。
- 計算リソースとデータ要件: スケーラブルではあるが、特に高次元および時間依存システムの場合、深層ニューラルネットワークのトレーニングは依然として計算集約的であり、大量の軌道データ(例:一部のモデルで $2 \times 10^6$ ポイント)を必要とする場合がある。これは、データ利用可能性が限られている実験にとって実用上の制約となる可能性がある。
- 有限時間ステップ効果: この手法はTURの短時間極限に依存している。実際には、実験データは有限時間間隔 $\Delta t$ でサンプリングされる。本論文では $\Delta t/\tau_{min} \ll 1$ という基準を示唆しているが、より大きな $\Delta t$ 値が推測された量の精度と解釈にどのように影響するか、特に非常に動的なシステムの場合の包括的な分析は有益であろう。
- 粗視化力場の解釈: 粗視化を適用する場合、学習された力場は、選択された解像度での実効的な表現である。解析的ベンチマークが利用できない複雑な非線形システムの場合、これらの実効力場の正確な物理的解釈は、さらなる理論的開発を必要とする可能性がある。
- 局在エントロピーと総エントロピー生成の区別: 明示的に時間依存的な過程の場合、この手法によって推測された局在エントロピー生成 $dS(t)$ は、確率密度関数の明示的な時間依存性に関連する項によって、総確率的エントロピー生成とは異なる。 $dS(t)$ は平均率への不可逆的な寄与を捉えるが、第二法則違反イベントの完全な特徴付けには、この追加項を考慮する必要があり、現在の推測では直接提供されない。
将来の方向性:
本論文の発見は、多数の将来の探求のための堅牢な基盤を築き、多様な視点からの重要な思考を刺激する:
-
多様な実験システムへの適用拡大:
- 生物学的文脈: この手法を、細胞シグナル伝達ネットワーク、代謝経路、または単一分子実験における分子モーターの動作のような実際の生物システムにおけるエネルギー散逸の定量化と時空間局在化にどのように適用できるか?それは生きた細胞におけるエネルギー変換または調節の新しいメカニズムを明らかにするだろうか?
- アクティブマター物理学: このフレームワークを、自己推進コロイドや細菌コロニーのようなアクティブマターシステムに適用して、局在エネルギー散逸がどのように集団行動、自己組織化、および相転移を駆動するかを理解できるか?アクティブ乱流またはパターン形成に関する新しい洞察が得られるだろうか?
-
理論的およびアルゴリズム的基盤の進歩:
- 過減衰動力学を超えて: 現在の研究は過減衰拡散過程に焦点を当てている。慣性効果が重要である減衰系、または多くの複雑なシステムに普及している非マルコフ過程に、この手法をどのように拡張し、厳密に検証できるか?
- 低信号対雑音レジームでの堅牢性: どのような新しいニューラルネットワークアーキテクチャ、正則化技術、または物理学に焦点を当てた機械学習戦略が、高次元で弱散逸なレジームでの手法の精度と一般化能力を向上させることができるか?学習目的により明示的な物理的制約を組み込むことは役立つだろうか?
- リアルタイム推論: 推論アルゴリズムを、実験データストリームのリアルタイムまたはほぼリアルタイム処理のために最適化できるか?これは、ライブ実験における適応的サンプリングまたはフィードバック制御戦略の実装に不可欠であろう。
-
局在エントロピーを逆設計と制御に活用:
- 最適制御戦略: 散逸を局在化する能力を考慮すると、この情報を、特定のタスク(例:ビット消去、分子輸送)のエネルギー散逸を最小化するか、望ましい非平衡状態を達成するための最適な制御プロトコルを設計するためにどのように使用できるか?これは、よりエネルギー効率の高いナノマシンにつながるだろうか?
- 材料とシステムの逆設計: この手法は、調整された時空間散逸特性を持つアクティブ材料または生物ネットワークの逆設計をガイドできるか?例えば、自己組織化または標的力生成のための特定の局所非平衡特性を持つコロイド格子を設計する。
- 適応的サンプリング: 推測された局在エントロピー生成は、実験における適応的サンプリング戦略をガイドし、統計的効率を向上させ、希少イベントを明らかにするために高散逸領域にデータ収集を集中させるだろうか?
-
情報理論と熱力学との関連性の探求:
- 情報-エネルギートレードオフ: 局在エントロピー生成は、複雑なシステム、特に生物学的文脈における情報処理とストレージとどのように関連するか?このフレームワークは、ナノスケールでの計算またはセンシングの基本的な熱力学的コストに関する新しい洞察を提供できるか?
- 複雑なシステムにおけるゆらぎ定理: 高度に非線形、時間依存的、および粗視化されたシステムにおける局在ゆらぎ定理のさらなる探求は、非平衡統計力学の理解を深める可能性がある。
これらの将来の方向性は、複雑なシステムにおけるエネルギー散逸と不可逆性の詳細な理解へと進む、このデータ駆動型アプローチの変革の可能性を強調しており、基礎科学と工学の両方に影響を与える。
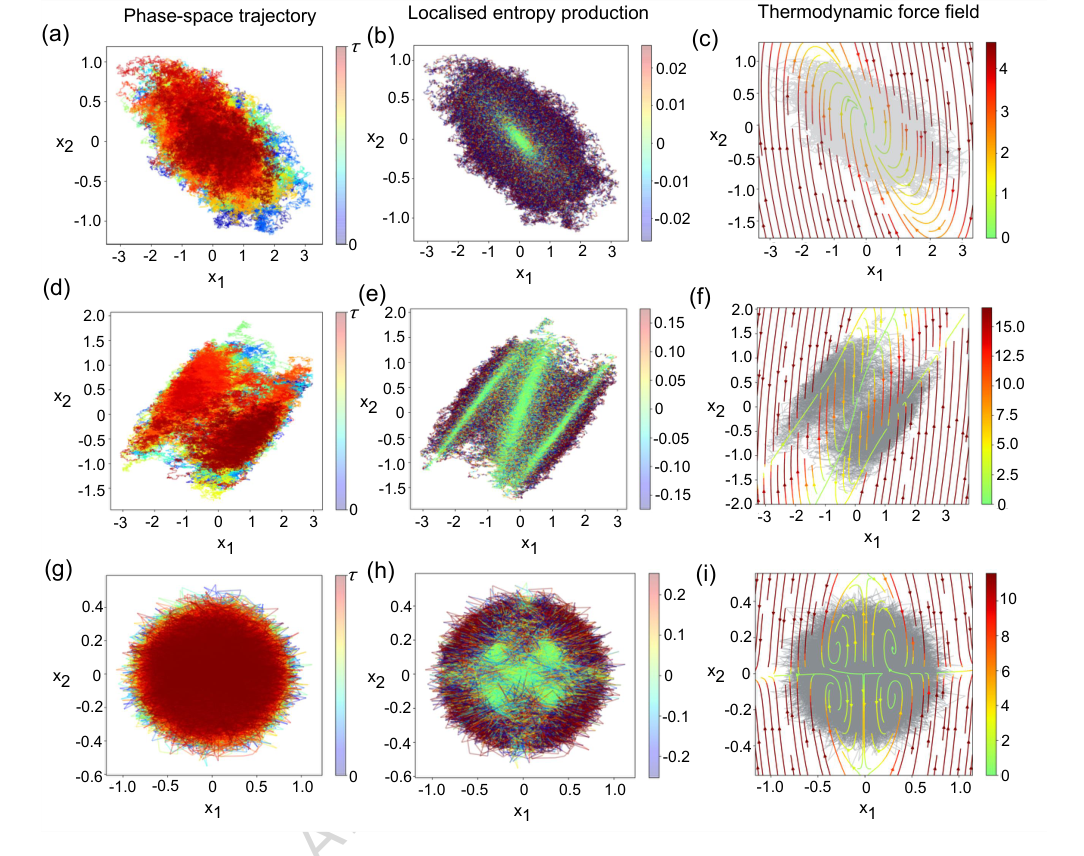 FIG. 2. Local entropy production in Brownian gyrator models. (a) 2D-dimensional trajectories of a Brownian gyrator system with harmonic confining potential. [Parameters: k1 = 1, k2 = 2, γ = 1, θ = π/4, D1 = 1, D2 = 0.1]. (b) local entropy production rate and (c) thermodynamic force field for the system with harmonic confinement - estimated using the neural network representation. (d) 2D-dimensional trajectories of a Brownian gyrator system with a bi-stable confining potential. [Parameters: k = 1, b = 1, γ = 1, θ = π/4, D1 = 1, D2 = 0.1] (e) local entropy production rate and (f) thermodynamic force field estimated using the neural network representation. (g) 2D-dimensional trajectories of a Brownian gyrator system with a quartic confining potential. [Parameters: k1 = k2 = 10, γ = 1, θ = π/4, D1 = 10, D2 = 1] (h) local entropy production rate and (i) thermodynamic force field estimated using the neural network representation. The colours corresponding to the local entropy production rate (in units of kB/s) of the gyrators are thresholded between [−α median, α median] , where α (typically 20 −50) multiplies the median of the corresponding local entropy production dataset. Values outside these ranges are clipped for visualisation purposes to prevent rare large fluctuations from dominating the colour mapping. Similarly, the thermodynamic force field values for the gyrators are thresholded within [0, median]. The numerical trajectories are usually generated for 2000s with a sampling rate of 1 kHz - from which trajectory traces of 500s are shown in the plots. The colorbars in panels (a), (d), and (e) indicate the progression along the trajectory
FIG. 2. Local entropy production in Brownian gyrator models. (a) 2D-dimensional trajectories of a Brownian gyrator system with harmonic confining potential. [Parameters: k1 = 1, k2 = 2, γ = 1, θ = π/4, D1 = 1, D2 = 0.1]. (b) local entropy production rate and (c) thermodynamic force field for the system with harmonic confinement - estimated using the neural network representation. (d) 2D-dimensional trajectories of a Brownian gyrator system with a bi-stable confining potential. [Parameters: k = 1, b = 1, γ = 1, θ = π/4, D1 = 1, D2 = 0.1] (e) local entropy production rate and (f) thermodynamic force field estimated using the neural network representation. (g) 2D-dimensional trajectories of a Brownian gyrator system with a quartic confining potential. [Parameters: k1 = k2 = 10, γ = 1, θ = π/4, D1 = 10, D2 = 1] (h) local entropy production rate and (i) thermodynamic force field estimated using the neural network representation. The colours corresponding to the local entropy production rate (in units of kB/s) of the gyrators are thresholded between [−α median, α median] , where α (typically 20 −50) multiplies the median of the corresponding local entropy production dataset. Values outside these ranges are clipped for visualisation purposes to prevent rare large fluctuations from dominating the colour mapping. Similarly, the thermodynamic force field values for the gyrators are thresholded within [0, median]. The numerical trajectories are usually generated for 2000s with a sampling rate of 1 kHz - from which trajectory traces of 500s are shown in the plots. The colorbars in panels (a), (d), and (e) indicate the progression along the trajectory
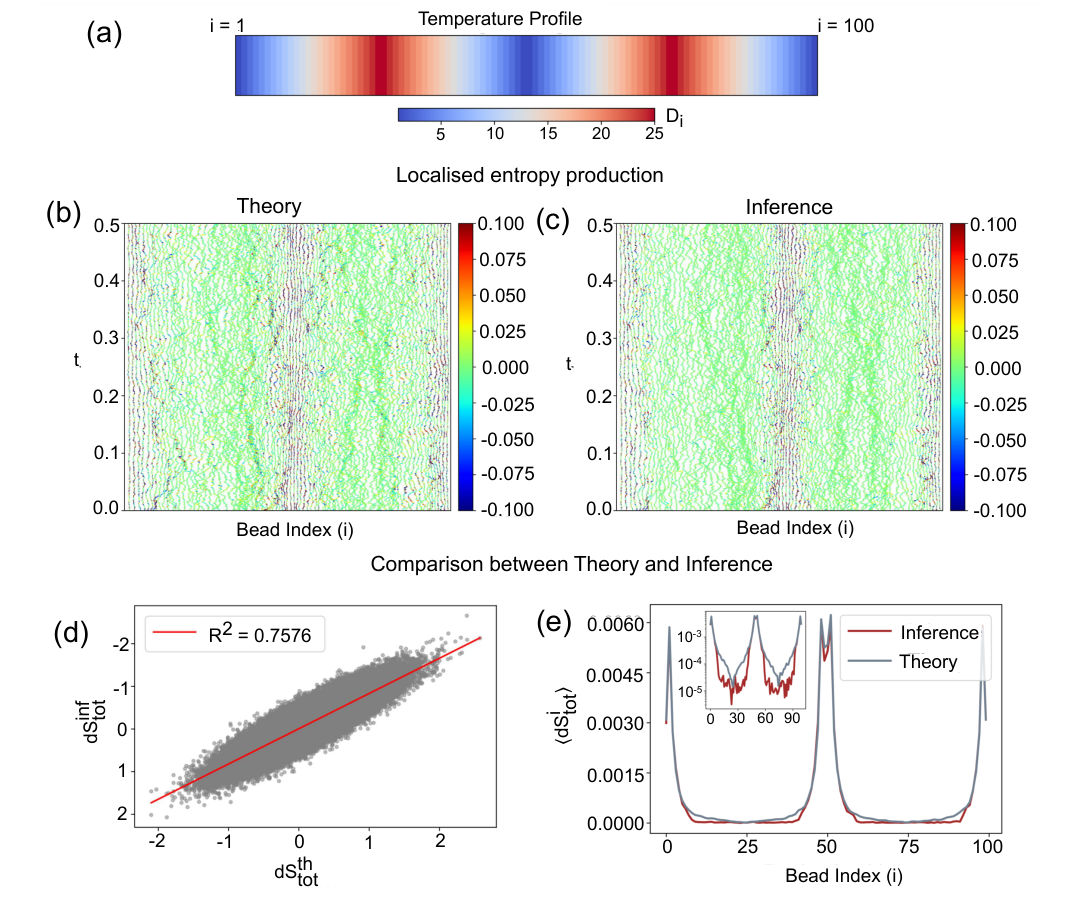 FIG. 4. Bead wise local entropy production for N-dimensional brownian gyrator model. (a) Temperature profile of the N-dimensional gyrator setup. Di denotes the diffusion coefficient of i-th bead as kB = γ = 1. (b) Analytically estimated local entropy production rate (in units of kB/s) of the system. (c) Local entropy production rate (in units of kB/s) inferred from the numerical trajectories using a neural network representation. The colors do not indicate the true values of the fluctuating entropy current, but they are thresholded for better visualisation. (d) Convergence test (R2 test) of the neural network–based estimation of the fluctuating entropy production rate for an N-dimensional Brownian gyrator with N = 100. The inferred and analytical local entropy production rates, averaged over all beads, exhibit a finite spread around the linear fit. (e) Comparison of the inferred average entropy production for each bead with the corresponding theoretical estimate. (Inset) The same data shown on a logarithmic (y-) scale reveals that dissipation of beads associated with low irreversible signature (entropy production) are challenging for the neural network to capture, resulting in a mismatch with the theoretical prediction
FIG. 4. Bead wise local entropy production for N-dimensional brownian gyrator model. (a) Temperature profile of the N-dimensional gyrator setup. Di denotes the diffusion coefficient of i-th bead as kB = γ = 1. (b) Analytically estimated local entropy production rate (in units of kB/s) of the system. (c) Local entropy production rate (in units of kB/s) inferred from the numerical trajectories using a neural network representation. The colors do not indicate the true values of the fluctuating entropy current, but they are thresholded for better visualisation. (d) Convergence test (R2 test) of the neural network–based estimation of the fluctuating entropy production rate for an N-dimensional Brownian gyrator with N = 100. The inferred and analytical local entropy production rates, averaged over all beads, exhibit a finite spread around the linear fit. (e) Comparison of the inferred average entropy production for each bead with the corresponding theoretical estimate. (Inset) The same data shown on a logarithmic (y-) scale reveals that dissipation of beads associated with low irreversible signature (entropy production) are challenging for the neural network to capture, resulting in a mismatch with the theoretical prediction
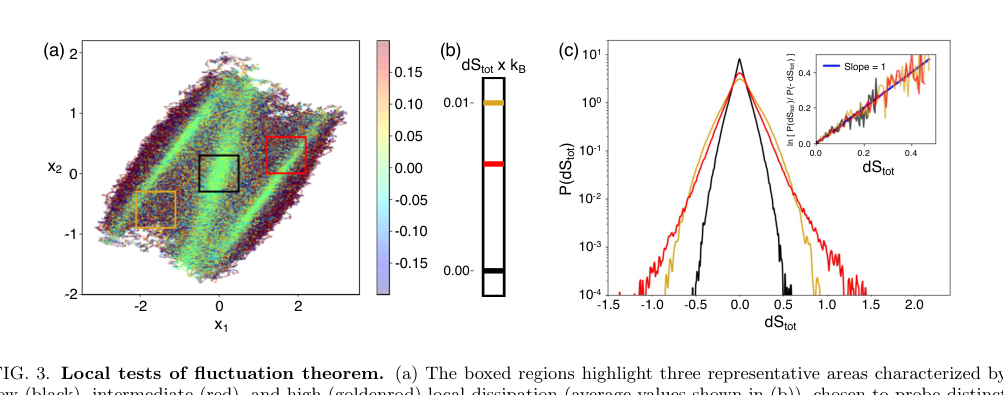 Figure 4. (b) depicts the local entropy production using the theoretically known form of F (x), while Figure 4(c) shows the same obtained from solving the inference algo- rithm. As we see, there is good visual agreement between the theory and the results obtained from the inference al- gorithm. To quantify the agreement between theory and infer- ence, Figure 4(d) shows a scatter plot comparing the analytically computed and learned entropy production, summed over all beads. The data follow a clear linear trend with an R2 value of 0.7576, with noticeably better agreement in the high-dissipation regime. To investigate the origin of the remaining spread, Figure 4(e) shows the time-averaged entropy production of each bead. This re- veals a separation of roughly two to three orders of mag- nitude between beads with high and low entropy produc- tion, and shows that the discrepancy between theory and inference is noticeably high at the low-dissipation beads
Figure 4. (b) depicts the local entropy production using the theoretically known form of F (x), while Figure 4(c) shows the same obtained from solving the inference algo- rithm. As we see, there is good visual agreement between the theory and the results obtained from the inference al- gorithm. To quantify the agreement between theory and infer- ence, Figure 4(d) shows a scatter plot comparing the analytically computed and learned entropy production, summed over all beads. The data follow a clear linear trend with an R2 value of 0.7576, with noticeably better agreement in the high-dissipation regime. To investigate the origin of the remaining spread, Figure 4(e) shows the time-averaged entropy production of each bead. This re- veals a separation of roughly two to three orders of mag- nitude between beads with high and low entropy produc- tion, and shows that the discrepancy between theory and inference is noticeably high at the low-dissipation beads
他分野との関連
数学的骨子
この作業の純粋な数学的核は、ノイズの多い軌道データから隠れた力場を推測するために設計された変分最適化フレームワークである。これは、一般化電流の特定の信号対雑音比—二乗平均対分散—を最大化することによってこれを達成し、未知の力場は深層ニューラルネットワークによって堅牢にパラメータ化される。
隣接研究分野
最適制御理論
本論文は、エントロピー生成率の変分表現(Eq. (9))がこの分野で確立された形式であることを指摘し、最適制御理論との関連を明示的に描いている。最適制御では、しばしば軌道または統計的平均に依存する目的関数に依存する制御関数を見つけることが目標となる。ここでは、熱力学力場 $d(\mathbf{x},t)$ がそのような関数として機能し、比率 $2 \langle J_{\Delta t}^d \rangle^2 / \text{Var}(J_{\Delta t}^d)$ を最大化するためにシステム動力学に影響を与える。この力場をパラメータ化し、その最適化のための勾配ベースの手法に深層ニューラルネットワークを使用することは、特に解析解が困難な場合に、複雑でデータ駆動型の最適制御問題を解決するための現代的なアプローチである。この戦略は、観測されたシステム動作から最適なフィードバック制御法則を学習することに類似している。ニューラルネットワークと最適制御を組み合わせた関連アプローチについては、Yan, Touchette, and Rotskoff (2022, Physical Review E) を参照のこと。
確率過程の統計的推論
本研究は、特に非平衡システムにおける確率過程の統計的推論に大きく貢献している。課題は、根底にある動力学方程式の事前知識なしに、実験的軌道データから直接、観測されていないパラメータまたは力場を推測することである。提示された手法は、短時間熱力学的不確定性関係(TUR)の短時間極限を活用して、散逸力場と局在エントロピー生成のためのモデルフリー推論スキームを提供する。これは、特定のモデル仮定(例:フォッカー・プランク方程式)に依存したり、システムを摂動したりする必要がある従来のの手法とは対照的である。ノイズの多い高次元データから熱力学力場のような物理的に意味のある量を抽出する能力は、この分野における主要な問題である。この領域の関連研究には、力場とエントロピー生成のデータ駆動型推論を探求した Frishman and Ronceray (2020, Physical Review X) および Manikandan et al. (2020, Physical Review Letters) が含まれる。
物理学に焦点を当てた機械学習
明示的にそのようにラベル付けされていなくても、方法論は物理学に焦点を当てた機械学習(PIML)の原則と強く一致している。ニューラルネットワークは、任意の損失関数でトレーニングされるのではなく、熱力学的不確定性関係(TUR)という基本的な物理原理から直接導出された目的関数でトレーニングされる。この物理的制約は、Eq. (9) で表現され、学習プロセスをガイドし、推測された散逸力場が物理的に一貫性があり意味のあるものであることを保証する。物理法則を機械学習目的関数に統合するこのアプローチは、特にデータが限られているかノイズが多いシナリオにおいて、ドメイン固有の知識を学習アーキテクチャに埋め込むことにより、より堅牢で解釈可能なモデルを可能にする。このアプローチは、機械学習モデルが単なるデータ補間器ではなく、根底にある物理法則を発見するためのツールである科学的発見の強力なパラダイムを表す。PIMLの一般的な概要は、Raissi, Perdikaris, and Karniadakis (2019, Journal of Computational Physics) で見つけることができる。