Локализация производства энтропии вдоль неравновесных траекторий
Проблема, лежащая в основе данной статьи, исходит из фундаментальной и давней задачи в статистической физике неравновесных систем: как точно количественно определить и пространственно-временно локализовать...
Предыстория и академическая родословная
Происхождение и академическая родословная
Проблема, лежащая в основе данной статьи, исходит из фундаментальной и давней задачи в статистической физике неравновесных систем: как точно количественно определить и пространственно-временно локализовать необратимость и рассеяние энергии в сложных системах непосредственно из экспериментальных данных. Хотя концепция производства энтропии служит универсальной метрикой для этих явлений, ее точная локализация в пространстве и времени вдоль неравновесных траекторий оставалась значительной «открытой проблемой» (стр. 2).
Исторически академическая родословная восходит к достижениям в области стохастической термодинамики [17-19] и появлению подходов, основанных на данных [11, 20-23]. Эти области предоставили строгую основу для понимания производства энтропии в отдельных реализациях неравновесных процессов, особенно когда тепловые флуктуации выражены [18, 26]. Однако сохранялось серьезное препятствие: традиционные методы измерения производства энтропии или полей диссипативных сил обычно опирались на предварительное знание лежащих в основе динамических уравнений системы, таких как уравнения Фоккера-Планка или мастер-уравнения. Во многих реалистичных экспериментальных сценариях эти уравнения и их решения неизвестны, что делает традиционные подходы непрактичными (стр. 2).
Предыдущие исследования преимущественно фокусировались на получении глобальных оценок средней скорости производства энтропии. Хотя такие методы, как равенство Харады-Сасы [6], оценки стационарных токов [5], меры временной необратимости [26-31] и оценщики вероятности путей [4, 32, 33], предлагали ценные сведения, они, как правило, давали общую меру, а не детальную, локализованную картину рассеяния. Попытки локализовать производство энтропии часто были ограничены: например, метод грубого статистического биннинга [20] плохо масштабировался для систем высокой размерности, а некоторые нейросетевые подходы обучались производству энтропии вдоль траекторий, но не полностью проясняли структуру лежащих в основе полей диссипативных сил [23]. Другие методы могли лишь выводить части поля диссипативных сил, предполагая, что оставшиеся компоненты уже известны [11, 40]. Фундаментальное ограничение, или «болевая точка», которую данная статья стремится устранить, заключается в отсутствии надежного, масштабируемого и не зависящего от модели метода для вывода пространственно-временной структуры как поля диссипативных сил, так и флуктуирующего производства энтропии непосредственно из экспериментальных данных траекторий, особенно в сложных, высокоразмерных и зависящих от времени неравновесных системах, без необходимости явного знания их управляющей динамики. Этот критический пробел мотивировал разработку представленного здесь подхода, основанного на данных, который использует термодинамическое соотношение неопределенности (TUR) и машинное обучение.
Интуитивные термины предметной области
- Производство энтропии ($\sigma$): Представьте себе идеально организованную комнату. Если вы устраиваете вечеринку, вещи становятся беспорядочными. «Производство энтропии» похоже на количество необратимого беспорядка, созданного во время вечеринки. Более высокое значение означает больший хаос и большую невозможность легко вернуть комнату в исходное состояние.
- Неравновесные траектории: Представьте себе человека, идущего через многолюдный рынок. Он постоянно движется, сталкивается с людьми, меняет направление и никогда по-настоящему не стоит в сбалансированном состоянии. «Неравновесная траектория» — это конкретный, извилистый путь, который проходит этот человек, всегда в движении и взаимодействуя с окружающей средой.
- Поле термодинамических сил ($F(\mathbf{x}, t)$): Это похоже на невидимый «ток» или «ветер», который толкает и тянет объекты в сложной среде, заставляя их двигаться в определенном, часто закрученном направлении. Это не простое толчок, а динамическое, пространственно изменяющееся влияние, которое выводит систему из состояния покоя и равновесия и вызывает рассеяние энергии.
- Термодинамическое соотношение неопределенности (TUR): Представьте себе канатоходца. «TUR» — это как фундаментальное правило, которое гласит: «Чем быстрее вы пытаетесь пересечь веревку (большее производство энтропии), тем больше будет колебаться и раскачиваться ваше тело (большие флуктуации в вашем движении неизбежны)». Оно устанавливает компромисс между эффективностью выполнения необратимой задачи и предсказуемостью вашего пути.
- Переторможенные диффузионные процессы: Представьте крошечное перышко, медленно падающее в неподвижном воздухе. Его падение полностью определяется сопротивлением воздуха и случайными потоками воздуха, а не его собственным импульсом. «Переторможенный диффузионный процесс» описывает движение, в котором инерция пренебрежимо мала, а движение доминирует трение и случайные толчки со стороны окружающей среды.
Таблица обозначений
| Обозначение | Описание |
|---|---|
Определение проблемы и ограничения
Формулировка основной проблемы и дилемма
Основная проблема, которую решает данная статья, заключается в точном пространственно-временном локализации производства энтропии и лежащих в основе полей диссипативных сил в сложных неравновесных системах, полученных непосредственно из экспериментальных данных траекторий.
Входные данные/Текущее состояние: Отправной точкой для этого анализа являются необработанные, экспериментально измеримые данные траекторий $\mathbf{x}(t)$ системы, работающей вдали от термодинамического равновесия. Важным аспектом является то, что эти данные предполагаются доступными без предварительного знания лежащих в основе динамических уравнений системы (таких как уравнения Фоккера-Планка или мастер-уравнения) или их аналитических решений, а также конкретных параметров системы.
Выходные данные/Целевое состояние: Желаемым конечным результатом является детальное, локализованное понимание необратимости системы. Это включает:
1. Диссипативное (термодинамическое) поле сил $F(\mathbf{x},t)$, которое является движущей силой неравновесной динамики.
2. Соответствующее флуктуирующее производство энтропии $\sigma$, локализованное как в пространстве, так и во времени вдоль отдельных траекторий. Этот результат позволяет исследователям точно определить, когда и где происходит рассеяние энергии в системе.
Отсутствующее звено и математический пробел: Фундаментальный пробел заключается в эффективном преобразовании необработанных данных траекторий в эти локализованные термодинамические величины. Исторически методы количественной оценки производства энтропии часто опирались на явное знание динамических уравнений системы, которые, как правило, неизвестны или аналитически неразрешимы для сложных, высокоразмерных или зависящих от времени систем. Хотя можно получить глобальные оценки средних скоростей производства энтропии, извлечение пространственно-временной структуры флуктуирующего производства энтропии и поля диссипативных сил из одних только данных оставалось серьезной проблемой.
Данная статья основывается на краткосрочном термодинамическом соотношении неопределенности (TUR) как вариационном принципе. TUR предоставляет формулу для скорости производства энтропии $\sigma_{TUR}(t)$, которая может быть максимизирована для получения точной скорости производства энтропии $\sigma(t)$. Критически важно, что оптимальное поле коэффициентов $d^*(\mathbf{x},t)$, максимизирующее это соотношение, известно как пропорциональное полю термодинамических сил $F(\mathbf{x},t)$. Таким образом, математический пробел заключается в том, как эффективно обучить это сложное, потенциально нелинейное и высокоразмерное оптимальное поле коэффициентов $d(\mathbf{x},t)$ непосредственно из данных траекторий. Статья преодолевает этот пробел, используя глубокие нейронные сети для параметризации и вывода $d(\mathbf{x},t)$, тем самым реконструируя как поле диссипативных сил, так и локальное производство энтропии.
Дилемма: Центральная дилемма, которая исторически ставила в тупик исследователей, — это болезненный компромисс между желанием получить высокоразрешающую, локализованную информацию о производстве энтропии и практическими ограничениями аналитической разрешимости и вычислительной масштабируемости. Предыдущие подходы либо:
* Требовали явного знания динамики системы, что редко доступно для реалистичных сложных систем.
* Могли предоставлять только глобальные, усредненные скорости производства энтропии, тем самым теряя все пространственно-временные детали.
* Методы, пытающиеся локализовать величины, такие как грубое статистическое биннирование, «плохо масштабируются для систем высокой размерности» (стр. 3), делая их непрактичными для многих реальных сценариев.
* Другие методы, основанные на данных, могут выводить производство энтропии вдоль траекторий, но часто «не изучают структуру лежащих в основе полей диссипативных сил» (стр. 3), которые необходимы для полного понимания движущих механизмов. Данная статья стремится преодолеть это, предлагая основанный на данных, не зависящий от модели подход, который обеспечивает как локализованное производство энтропии, так и поле сил.
Ограничения и режимы отказа
Проблема локализации производства энтропии из экспериментальных траекторий ограничена несколькими суровыми, реалистичными факторами, которые делают ее чрезвычайно сложной для решения:
- Вычислительная сложность и высокая размерность: Реальные неравновесные системы, особенно в таких областях, как биология или активная материя, часто включают многочисленные взаимодействующие компоненты, что приводит к высокоразмерным фазовым пространствам. В статье прямо отмечается, что «сложность высокоразмерных, многочастичных взаимодействий представляет значительные трудности для традиционных методов оптимизации» (стр. 5). Вывод сложных, нелинейных полей сил в таких огромных пространствах вычислительно затратен и может быстро стать неразрешимым для методов, которые не масштабируются эффективно.
- Отсутствие априорных знаний о динамике: Основным препятствием является отсутствие известных лежащих в основе динамических уравнений (например, уравнений Фоккера-Планка или мастер-уравнений) или их аналитических решений для большинства реалистичных систем (стр. 2). Это требует подхода вывода, не зависящего от модели, который по своей сути более сложен, чем оценка параметров в предопределенной модели.
- Зависящая от времени динамика: Многие неравновесные процессы явно зависят от времени, что означает, что поле термодинамических сил и скорость производства энтропии также являются изменяющимися во времени величинами. Эта временная зависимость «представляет значительные вычислительные трудности, делая прямую оценку этих величин весьма нетривиальной» (стр. 14). Обучение моделей для точного захвата таких динамических изменений требует надежных архитектур и достаточных данных.
- Качество данных и отношение сигнал/шум (SNR): Экспериментальные данные по своей природе зашумлены. Критическое ограничение возникает в «слабо диссипативных областях», где «необратимые сигнатуры малы по сравнению с флуктуациями» (стр. 10). В этих режимах низкого рассеяния эффективный SNR для обучения модели вывода «сильно снижается», что «ограничивает ее способность равномерно обобщаться на степени свободы с широко разделенными масштабами производства энтропии». Это может привести к несоответствию между выведенными и теоретическими предсказаниями в таких областях, как показано на рисунке 4(e).
- Ограничения экспериментальной выборки: Интервал выборки $\Delta t$ экспериментальных траекторий «часто фиксируется практическими ограничениями» (стр. 5). Хотя краткосрочное TUR в идеале требует $\Delta t \to 0$ для точного насыщения, практические значения $\Delta t$ конечны. Метод должен быть достаточно надежным, чтобы справляться с этими неидеальными скоростями выборки.
- Грубое усреднение и скрытые степени свободы: Экспериментальные наблюдения часто предоставляют лишь «уменьшенное описание лежащей в основе динамики» (стр. 16). Это может быть связано со «скрытыми степенями свободы» (ненаблюдаемыми переменными) или «конечным временным разрешением» (субвыборкой). Метод вывода должен быть способен давать осмысленные результаты даже при грубом усреднении наблюдаемых данных, что добавляет еще один уровень сложности к проблеме.
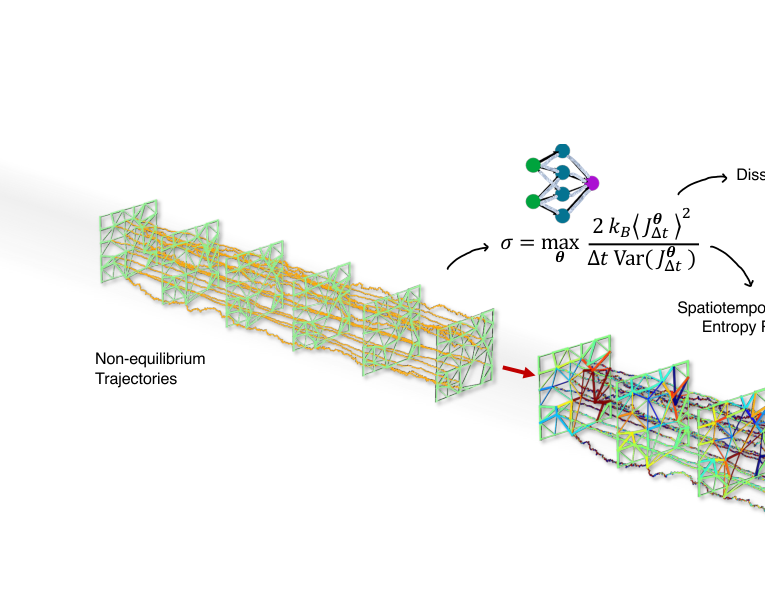 FIG. 1. Schematic of entropy production inference in an active biological network model. Input: The method processes experimentally measurable trajectory data without requiring prior knowledge of system parameters. Outputs: Using short-time Thermodynamic Uncertainty Relations and neural networks (schematically illustrated at the top with a cartoon), we simultaneously infer (i) the dissipative (thermodynamic) force field F (x, t) driving the nonequilibrium dynamics and (ii) the corresponding fluctuating entropy production (color scale: ±0.015kB/s), localized in both space and time. Here, σ denotes the local entropy production rate, and J∆t represents a generalized current in phase space
FIG. 1. Schematic of entropy production inference in an active biological network model. Input: The method processes experimentally measurable trajectory data without requiring prior knowledge of system parameters. Outputs: Using short-time Thermodynamic Uncertainty Relations and neural networks (schematically illustrated at the top with a cartoon), we simultaneously infer (i) the dissipative (thermodynamic) force field F (x, t) driving the nonequilibrium dynamics and (ii) the corresponding fluctuating entropy production (color scale: ±0.015kB/s), localized in both space and time. Here, σ denotes the local entropy production rate, and J∆t represents a generalized current in phase space
Почему такой подход
Неизбежность выбора
Выбор авторов объединить схему вывода на основе краткосрочного термодинамического соотношения неопределенности (TUR) с глубокими нейронными сетями был не просто произвольным выбором, а необходимой эволюцией, обусловленной присущими ограничениями традиционных подходов. Тот момент, когда авторы осознали, что традиционные «SOTA» методы недостаточны для данной конкретной проблемы, четко сформулирован при обсуждении трудностей прямого измерения производства энтропии и полей диссипативных сил из экспериментальных данных.
Традиционные подходы, как отмечает статья, «опираются на знание лежащих в основе динамических уравнений, таких как уравнения Фоккера-Планка и мастер-уравнения, и их решений, которые часто неизвестны в реалистичных условиях» (стр. 2). Эта фундаментальная зависимость от априорных знаний о динамике системы делает их непрактичными для многих реальных, сложных систем, где такие уравнения либо слишком сложны для вывода, либо просто недоступны. Кроме того, хотя некоторые методы могли предоставлять глобальные оценки среднего производства энтропии, критическая потребность «количественно определить и пространственно-временно локализовать его в сложных процессах непосредственно из экспериментальных данных» (стр. 2) оставалась серьезной открытой проблемой. Предыдущие попытки локализации, такие как метод грубого статистического биннинга [20], «плохо масштабируются для систем высокой размерности» (стр. 3), что указывает на отсутствие масштабируемости. Другие методы, такие как [23], обучались производству энтропии вдоль траекторий, но не смогли выявить лежащие в основе поля диссипативных сил, которые имеют решающее значение для понимания динамики.
Авторы признали, что сложность проблемы, особенно в «высокоразмерных, многочастичных взаимодействиях», представляла «значительные трудности для традиционных методов оптимизации» (стр. 5). Это ключевое осознание: существующие методы, будь то аналитические или более простые статистические методы, не могли одновременно выводить как локальное производство энтропии, так и поле диссипативных сил масштабируемым образом, основанным на данных, в высокоразмерном пространстве без предварительного знания управляющих уравнений системы. Краткосрочное TUR, которое предоставляет вариационное представление скорости производства энтропии и напрямую связывает его с полем термодинамических сил (Уравнение 9), предложило теоретическую основу. Однако для практического решения этой вариационной задачи для сложных, высокоразмерных систем незаменимым оказался мощный аппроксиматор функций, что напрямую привело к использованию глубоких нейронных сетей.
Сравнительное превосходство
Этот комбинированный подход демонстрирует подавляющее качественное превосходство над предыдущими золотыми стандартами, выходящее далеко за рамки простых метрик производительности. Структурное преимущество заключается в его способности моделировать сложные, высокоразмерные и потенциально зависящие от времени поля диссипативных сил без явного знания лежащих в основе динамических уравнений.
- Вывод без модели: В отличие от традиционных методов, требующих явных динамических уравнений (например, уравнений Фоккера-Планка или мастер-уравнений), эта структура «устраняет зависимость от явных динамических описаний процесса» (стр. 6). Это является огромным преимуществом для экспериментальных данных, где такие уравнения часто неразрешимы или неизвестны.
- Масштабируемость до высоких размерностей: Предыдущие попытки локализации производства энтропии, такие как грубое статистическое биннирование [20], «плохо масштабируются для систем высокой размерности» (стр. 3). Используя глубокие нейронные сети, которые «преуспевают в аппроксимации сложных, высокоразмерных функций» (стр. 5), предлагаемый метод предлагает «масштабируемое решение для анализа производства энтропии в системах с нетривиальными взаимодействиями между различными степенями свободы» (стр. 6). Это напрямую решает проблему высокоразмерного шума и сложных взаимодействий.
- Пространственно-временная локализация диссипативных сил: Метод не только выводит глобальную скорость производства энтропии, но, что критически важно, реконструирует «высокоразмерные, потенциально зависящие от времени поля диссипативных сил» и локализует «флуктуирующее производство энтропии как в пространстве, так и во времени вдоль неравновесных траекторий» (стр. 2). Это обеспечивает детальное, физически интерпретируемое понимание необратимости, которого в значительной степени не хватало предыдущим методам глобальной оценки.
- Временная гладкость и обобщение (для зависящих от времени систем): Для зависящей от времени динамики архитектура нейронной сети расширена для приема времени в качестве входных данных. Это «обеспечивает временную гладкость через общие параметры сети, позволяет обобщать на ненаблюдаемые времена и эффективно использовать данные по всему временному домену» (стр. 6-7). Это значительное качественное улучшение по сравнению с обучением отдельных моделей для каждой дискретной точки времени, что было бы вычислительно дорого и склонно к переобучению.
- Надежность и широкая применимость: Метод основан на «единой архитектуре нейронной сети, которая надежно работает во всех примерах без обширной настройки гиперпараметров, что делает ее практически применимой» (стр. 4). Это указывает на надежную и обобщаемую структуру, способную обрабатывать разнообразные системы (стационарные, нестационарные, линейные, нелинейные, низко- и высокоразмерные), как продемонстрировано в результатах.
Соответствие ограничениям
Выбранный метод идеально соответствует неявным и явным ограничениям проблемы, образуя «брак» между суровыми требованиями и уникальными свойствами решения.
- Требование, основанное на данных: Основное ограничение заключается в выводе производства энтропии «непосредственно из экспериментальных данных» без необходимости «предварительного знания параметров системы» или «лежащих в основе динамических уравнений» (стр. 2, Рисунок 1). Краткосрочное TUR в сочетании с нейронными сетями по своей сути основано на данных. Оно принимает «экспериментально измеримые данные траекторий» в качестве входных данных и обучается полю сил и производству энтропии из них, минуя необходимость в явных модельных уравнениях.
- Пространственно-временная локализация: Основная проблема заключается в «количественном определении и пространственно-временной локализации [производства энтропии] в сложных процессах» (стр. 2). Метод напрямую решает эту проблему, выводя «поле диссипативных (термодинамических) сил F(x,t)» и «соответствующее флуктуирующее производство энтропии... локализованное как в пространстве, так и во времени» (Рисунок 1, стр. 3). Вариационный принцип TUR, при оптимизации нейронной сетью, дает поле сил $F(x,t)$, которое при свертке с приращениями траектории дает локальное производство энтропии $dS(t) = F(x(t), t) \circ dx(t)$ (Уравнение 7).
- Обработка высокой размерности и сложности: Проблема включает «сложные процессы» и «высокоразмерные, многочастичные взаимодействия» (стр. 2, 5). Глубокие нейронные сети выбираются специально потому, что они «преуспевают в аппроксимации сложных, высокоразмерных функций» (стр. 5), позволяя модели захватывать сложные, нелинейные зависимости поля сил в высокоразмерных фазовых пространствах, задачу, в которой традиционные методы терпели неудачу из-за плохой масштабируемости.
- Неравновесная динамика (стационарная и зависящая от времени): Метод разработан для «систем, работающих вдали от равновесия» (стр. 2). Краткосрочное TUR доказано применимо как для стационарных, так и для зависящих от времени случаев [21, 22]. Архитектура нейронной сети адаптирована для включения времени в качестве входных данных для нестационарных процессов, обеспечивая ее применимость в различных неравновесных сценариях.
- Надежность экспериментальных данных: Структура нацелена на надежный вывод из «экспериментально разрешимых наблюдений» (стр. 2). Использование единой, надежной архитектуры нейронной сети «без обширной настройки гиперпараметров» (стр. 4) делает ее практичной и широко применимой, снижая хрупкость, часто связанную со сложными моделями, и обеспечивая надежные результаты даже при реальном экспериментальном шуме.
Отклонение альтернатив
Статья неявно и явно отклоняет несколько альтернативных подходов, подчеркивая их ограничения в контексте конкретной проблемы.
- Традиционные аналитические/уравненные методы: Наиболее значительным отклонением являются методы, которые «опираются на знание лежащих в основе динамических уравнений, таких как уравнения Фоккера-Планка и мастер-уравнения, и их решений» (стр. 2). Они считаются недостаточными, поскольку такие знания «часто неизвестны в реалистичных условиях» и доступны только для «ограниченного числа аналитически разрешимых случаев» (стр. 2, 5). Предлагаемый подход, основанный на данных и не зависящий от модели, напрямую обходит это фундаментальное ограничение.
- Глобальные оценщики производства энтропии: Многие существующие методы, включая равенство Харады-Сасы [6], методы стационарных токов/распределений вероятностей [5], меры временной необратимости [26-31] и оценщики вероятности путей [4, 32, 33], в основном фокусируются на «получении глобальных оценок средней скорости производства энтропии» (стр. 3). Хотя эти методы ценны, они не предоставляют желаемой «пространственно-временной локализации» производства энтропии и лежащих в основе полей диссипативных сил, что является центральной целью данной работы.
- Грубое статистическое биннирование: В статье конкретно упоминается, что метод грубого статистического биннирования, разработанный в ссылке [20] для оценки поля термодинамических сил, «плохо масштабируется для систем высокой размерности» (стр. 3). Это подчеркивает проблему масштабируемости, которая делает его непригодным для сложных, высокоразмерных систем, которые авторы стремятся анализировать. Нейросетевой подход, напротив, разработан для эффективной обработки такой сложности.
- Методы частичного вывода: Подходы, такие как ссылка [23], которые напрямую обучают производство энтропии вдоль траекторий, отмечаются тем, что «не изучают структуру лежащих в основе полей диссипативных сил» (стр. 3). Аналогично, методы, которые выводят лишь «часть поля диссипативных сил... предполагая, что оставшиеся компоненты известны заранее» [11, 40], недостаточны для полного, не зависящего от модели понимания всего поля сил. Предлагаемый метод нацелен на полный вывод поля диссипативных сил.
- Другие модели машинного обучения (неявно): Хотя другие модели машинного обучения, такие как GAN или базовые Трансформеры, явно не отклоняются, выбор архитектуры глубокой нейронной сети, в частности модели, вдохновленной Deep-Ritz, мотивирован ее доказанной способностью «преуспевать в аппроксимации сложных, высокоразмерных функций» и ее успехом в «методах оптимального управления» и «эффективной выборке редких событий» [52, 53] (стр. 5). Это подразумевает, что более простые или менее специализированные архитектуры машинного обучения могут не предлагать такого же уровня гибкости, надежности или эффективности в исследовании пространства параметров для данной конкретной задачи вариационной оптимизации, особенно учитывая необходимость точной реконструкции высокоразмерных полей сил. Аддитивная структура выбранной сети также «помогает сохранять информацию между слоями и стабилизирует обучение» (стр. 5), предполагая продуманный выбор по сравнению с потенциально менее стабильными альтернативами.
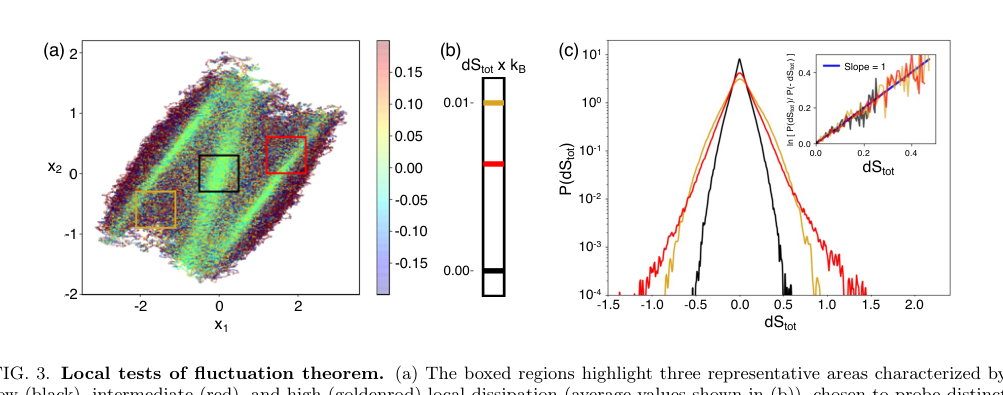 FIG. 3. Local tests of fluctuation theorem. (a) The boxed regions highlight three representative areas characterized by low (black), intermediate (red), and high (goldenrod) local dissipation (average values shown in (b)), chosen to probe distinct dynamical environments. (c) Probability distributions P(dStot) conditioned on these regions, illustrating pronounced region- dependent differences in the statistics of entropy production. The low-dissipation region exhibit narrow, nearly symmetric distributions, while higher-dissipation regions display broader, strongly skewed distributions with extended tails. The inset shows the corresponding fluctuation ratios ln[P(dStot)/P(−dStot)] as a function of dStot, demonstrating that each region independently satisfies a local fluctuation theorem with unit slope
FIG. 3. Local tests of fluctuation theorem. (a) The boxed regions highlight three representative areas characterized by low (black), intermediate (red), and high (goldenrod) local dissipation (average values shown in (b)), chosen to probe distinct dynamical environments. (c) Probability distributions P(dStot) conditioned on these regions, illustrating pronounced region- dependent differences in the statistics of entropy production. The low-dissipation region exhibit narrow, nearly symmetric distributions, while higher-dissipation regions display broader, strongly skewed distributions with extended tails. The inset shows the corresponding fluctuation ratios ln[P(dStot)/P(−dStot)] as a function of dStot, demonstrating that each region independently satisfies a local fluctuation theorem with unit slope
Математический и логический механизм
Мастер-уравнение
Основным математическим двигателем, лежащим в основе подхода данной статьи к локализации производства энтропии, является вариационное представление скорости производства энтропии, выведенное из краткосрочного термодинамического соотношения неопределенности (TUR). Для стационарных неравновесных процессов целевая функция, которую модель стремится максимизировать во время обучения, задается как:
$$ f(\theta)_{\text{train}} = \frac{2k_B \langle J_{\Delta t}^\theta \rangle^2}{\Delta t \text{Var}(J_{\Delta t}^\theta)} $$
Для зависящей от времени динамики эта цель расширяется для агрегирования по мини-пакету выбранных точек времени $\{t_k\}$:
$$ f(\theta) = \sum_{k=1}^{\text{batch\_size}} \frac{2k_B \langle J_{\Delta t,k}^\theta \rangle^2}{\Delta t \text{Var}(J_{\Delta t,k}^\theta)} $$
Это уравнение, по сути, количественно определяет эффективность необратимых процессов системы, связывая средний поток «обобщенного» тока с его флуктуациями. Максимизация этой величины позволяет выводить лежащее в основе поле диссипативных сил и, следовательно, локальное производство энтропии.
Потерминный разбор
Давайте разберем основную целевую функцию для стационарных процессов $f(\theta)_{\text{train}}$, чтобы понять каждый компонент:
-
$f(\theta)_{\text{train}}$:
1) Математическое определение: Это целевая функция, которую алгоритм обучения стремится максимизировать во время фазы обучения. Это скалярное значение, представляющее оцененную скорость производства энтропии.
2) Физическая/логическая роль: Его значение напрямую соответствует выведенной скорости производства энтропии для данного набора параметров модели $\theta$. Цель оптимизации — найти $\theta$, которое дает максимально возможное значение, что, согласно TUR, соответствует истинной скорости производства энтропии.
3) Почему такая форма: Это величина, выведенная из краткосрочного TUR, которая максимизируется для вывода производства энтропии. -
$k_B$:
1) Математическое определение: Постоянная Больцмана. В статье явно указано, что $k_B = 1$ для упрощения.
2) Физическая/логическая роль: Фундаментальная физическая константа, которая обеспечивает естественный масштаб энергии для тепловых флуктуаций и связывает температуру с энергией. В данном контексте она обеспечивает согласованность единиц измерения производства энтропии (например, в единицах $k_B/s$). Установка ее равной 1 фактически нормализует энтропию в единицах $k_B$.
3) Почему такая форма: Это постоянный масштабирующий множитель, а не оператор. -
$\langle J_{\Delta t}^\theta \rangle$:
1) Математическое определение: Обозначает среднее по ансамблю (или математическое ожидание) обобщенного тока $J_{\Delta t}^\theta$. Сам обобщенный ток определяется как $J_{\Delta t}^\theta = d(x_{t+\Delta t/2}; \theta) \circ (x_{t+\Delta t} - x_t)$, где $d(x; \theta)$ — параметризованное поле диссипативных сил, а $\circ$ обозначает произведение Стратоновича.
2) Физическая/логическая роль: Этот член представляет собой средний «поток» или «дрейф» в фазовом пространстве, определяемый выведенным полем сил $d(x; \theta)$ за короткий промежуток времени $\Delta t$. Ненулевой средний ток является прямым индикатором системы, работающей вне термодинамического равновесия, и неразрывно связан с рассеянием энергии.
3) Почему угловые скобки: Угловые скобки $\langle \dots \rangle$ являются стандартным обозначением для среднего по ансамблю, которое включает суммирование или интегрирование по всем возможным реализациям тока, взвешенным по их вероятности. Это необходимо для получения статистически надежного среднего значения. -
$(\dots)^2$:
1) Математическое определение: Эта операция возводит в квадрат среднее по ансамблю обобщенного тока.
2) Физическая/логическая роль: Возведение в квадрат гарантирует, что вклад среднего тока в целевую функцию всегда положителен, независимо от направления тока. Что более важно, оно придает квадратичное усиление большим средним токам, которые характерны для систем, более удаленных от равновесия и, следовательно, производящих больше энтропии.
3) Почему возведение в квадрат: Математическая форма TUR диктует квадрат среднего тока в числителе, отражая квадратичную зависимость от среднего тока. -
$\Delta t$:
1) Математическое определение: Это дискретный интервал выборки или шаг, используемый для записи траектории системы.
2) Физическая/логическая роль: Он представляет собой короткий промежуток времени, в течение которого вычисляется обобщенный ток. Предел «краткосрочного» времени имеет решающее значение для того, чтобы TUR давал точную оценку скорости производства энтропии. В знаменателе он действует как масштабирующий множитель, преобразуя величину от общего тока за $\Delta t$ в скорость в единицу времени.
3) Почему деление: Деление на $\Delta t$ преобразует общий ток, накопленный за интервал, в скорость, что соответствует определению скорости производства энтропии. -
$\text{Var}(J_{\Delta t}^\theta)$:
1) Математическое определение: Это дисперсия обобщенного тока $J_{\Delta t}^\theta$, определяемая как $\text{Var}(X) = \langle X^2 \rangle - \langle X \rangle^2$.
2) Физическая/логическая роль: Этот член количественно определяет флуктуации или неопределенность вокруг среднего обобщенного тока. В контексте TUR меньшая дисперсия для данного среднего тока подразумевает более «определенный» или менее зашумленный процесс, что приводит к более высокой выведенной скорости производства энтропии. Он действует как штраф за чрезмерные флуктуации, поскольку высокая неопределенность сделает оценку производства энтропии менее надежной.
3) Почему в знаменателе: TUR устанавливает обратную зависимость между производством энтропии и относительными флуктуациями тока. Размещение дисперсии в знаменателе отражает эту фундаментальную границу. -
$\max_{\theta}$:
1) Математическое определение: Это оператор максимизации, указывающий, что целевая функция $f(\theta)_{\text{train}}$ оптимизируется относительно набора параметров $\theta$.
2) Физическая/логическая роль: Это центральный механизм схемы вывода. Алгоритм активно ищет конкретный набор параметров $\theta$ (которые определяют поле диссипативных сил $d(x;\theta)$), который максимизирует отношение квадрата среднего тока к его дисперсии. Этот принцип максимизации, основанный на TUR, позволяет модели идентифицировать «оптимальное» поле сил, которое наиболее точно описывает неравновесную динамику системы и связанное с ней производство энтропии.
3) Почему максимизация: TUR предоставляет нижнюю границу для производства энтропии. Максимизируя это конкретное отношение, метод стремится найти ток, который насыщает эту границу, тем самым давая точную скорость производства энтропии.
Пошаговый поток
Представьте себе одну абстрактную точку данных, которая в данном контексте представляет собой короткий сегмент траектории частицы, проходящий через математический механизм:
- Входные данные сегмента траектории: Процесс начинается с входных данных: двух последовательных положений частицы, $x_t$ и $x_{t+\Delta t}$, отобранных из более длинной неравновесной траектории. Это представляет состояние частицы во времени $t$ и через короткий промежуток времени $\Delta t$.
- Расчет середины: Сначала система вычисляет середину этого сегмента: $x_{\text{mid}} = (x_t + x_{t+\Delta t})/2$. Эта середина служит репрезентативной позицией для интервала.
- Расчет смещения: Одновременно вычисляется вектор смещения для этого сегмента: $\Delta x = x_{t+\Delta t} - x_t$. Этот вектор указывает, насколько и в каком направлении переместилась частица.
- Вывод поля сил (прямой проход нейронной сети): Вычисленная середина $x_{\text{mid}}$ затем подается в нейронную сеть, которая представляет параметризованное поле диссипативных сил $d(x; \theta)$. Используя свои текущие внутренние веса и смещения (параметры $\theta$), сеть выполняет прямой проход, преобразуя $x_{\text{mid}}$ в выходной вектор $d(x_{\text{mid}}; \theta)$. Этот выход является текущей оценкой моделью термодинамической силы, действующей в этой позиции и времени.
- Вычисление обобщенного тока: Выведенное поле сил $d(x_{\text{mid}}; \theta)$ затем комбинируется со смещением $\Delta x$ с использованием произведения Стратоновича (эффективно скалярное произведение в данном контексте) для вычисления обобщенного тока для данного сегмента: $J_{\Delta t}^\theta = d(x_{\text{mid}}; \theta) \cdot \Delta x$. Эта величина количественно определяет «работу», выполненную выведенной силой вдоль пути частицы.
- Накопление пакета: Эта вся последовательность (шаги 1-5) повторяется для многих таких сегментов траектории, формируя «пакет» значений $J_{\Delta t}^\theta$.
- Статистическая агрегация: После накопления пакета значений $J_{\Delta t}^\theta$ система вычисляет их среднее по ансамблю $\langle J_{\Delta t}^\theta \rangle$ и их дисперсию $\text{Var}(J_{\Delta t}^\theta)$. Эти статистические меры обобщают средний поток и его флуктуации по пакету.
- Оценка целевой функции: Наконец, эти вычисленные средние значения и значения дисперсии подставляются в мастер-уравнение (например, $f(\theta)_{\text{train}}$) для вычисления одного скалярного значения. Это значение указывает, насколько хорошо текущие параметры поля сил $\theta$ работают при оценке скорости производства энтропии в соответствии с TUR. Это завершает один полный проход для оценки цели.
Динамика оптимизации
Механизм обучается и сходится путем итеративного уточнения внутренних параметров нейронной сети $\theta$ посредством процесса градиентного подъема, направленного на максимизацию целевой функции $f(\theta)_{\text{train}}$ (или $f(\theta)$ для зависящих от времени случаев).
-
Ландшафт потерь: Целевая функция $f(\theta)$ определяет сложный «ландшафт потерь» в высокоразмерном пространстве параметров сети $\theta$. В отличие от многих задач машинного обучения, которые минимизируют функцию потерь, здесь цель состоит в том, чтобы найти пик(и) этого ландшафта, поскольку более высокое значение $f(\theta)$ означает более точный вывод производства энтропии. Нелинейный характер глубоких нейронных сетей и статистические операции (среднее и дисперсия) делают этот ландшафт сложным.
-
Градиентный подъем: На каждом шаге процесса обучения алгоритм вычисляет градиент целевой функции по отношению к каждому параметру в $\theta$, то есть $\nabla_\theta f(\theta)_{\text{train}}$. Этот вектор градиента указывает направление самого крутого увеличения целевой функции на ландшафте потерь.
-
Обновление параметров: Параметры $\theta$ затем обновляются путем шага в направлении этого положительного градиента. Размер этого шага контролируется гиперпараметром «скорость обучения» (lr). Правило обновления обычно выглядит так:
$$ \theta_{\text{new}} = \theta_{\text{old}} + \text{lr} \cdot \nabla_\theta f(\theta)_{\text{train}} $$
Это итеративное изменение постепенно перемещает параметры к конфигурации, которая максимизирует целевую функцию, тем самым улучшая аппроксимацию истинного поля термодинамических сил. -
Сходимость и обобщение:
- Сходимость: Цикл обучения продолжается, параметры обновляются на каждой итерации. По мере уточнения параметров $\theta$ выведенное поле сил $d(x;\theta)$ становится все более точным представлением фактического поля диссипативных сил $F(x,t)$. Это приводит к увеличению значения целевой функции, указывая на то, что модель сходится к более точной оценке скорости производства энтропии.
- Управление переобучением: Критическим аспектом оптимизации является предотвращение переобучения, особенно при ограниченных данных. В статье отмечается, что иногда промежуточный набор параметров может работать лучше на невидимых данных, чем окончательная, полностью сошедшаяся модель. Для решения этой проблемы алгоритм сохраняет промежуточные наборы параметров $\{\theta_m\}$ на протяжении всего обучения. После основного цикла обучения все эти сохраненные модели оцениваются на отдельном, отложенном наборе данных валидации. Окончательные оптимальные параметры $\theta^*$ выбираются как те, которые дают наивысшее значение целевой функции на этом наборе валидации, гарантируя, что модель хорошо обобщается за пределы обучающих данных. Для больших наборов данных авторы наблюдают, что переобучение становится пренебрежимо малым, и модель, оптимальная для обучения, также оптимально работает на данных валидации.
-
Расширение для зависящих от времени систем: Для систем с зависящей от времени динамикой нейронная сеть спроектирована так, чтобы принимать время $t$ в качестве дополнительного входного сигнала. Целевая функция (Уравнение 17) затем вычисляется путем усреднения по мини-пакету выбранных точек времени. Эта формулировка позволяет сети обучаться изменяющемуся во времени полю сил, одновременно обеспечивая временную гладкость через общие параметры сети, позволяя обобщать на ненаблюдаемые времена и эффективно использовать данные по всему временному домену. Основной механизм градиентного подъема для обновления $\theta$ остается прежним, но теперь он работает на этой агрегированной по времени цели. Этот итеративный процесс гарантирует, что механизм эффективно обучается тому, как происходит производство энтропии и как состояние системы обновляется во времени.
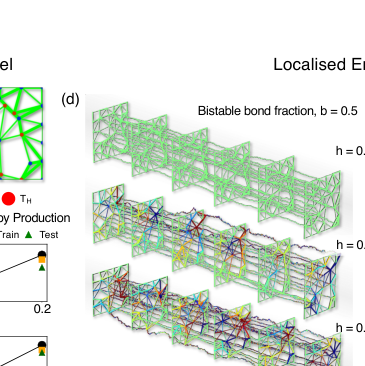 FIG. 5. Entropy production and finite-time fluctuations in active–bistable mechanical networks. (a) Example disordered two-dimensional spring network with a fraction of hot nodes (red, temperature Thot) and cold nodes (blue, Tcold). Thin green bonds denote linear springs, while thick green bonds indicate bistable springs. (b,c) Average entropy production rate as a function of the fraction of hot nodes h at fixed bistable bond fraction b = 0.5 (b), and as a function of the bistable bond fraction b at fixed h = 0.2 (c). Symbols show inferred values from training and test data, while solid lines indicate theoretical predictions for the total entropy production rate. (d) Spatial maps of the inferred local entropy production rate for increasing hot-node fraction h at fixed b = 0.5. (e) Spatial maps of the inferred local entropy production rate for increasing bistable bond fraction b at fixed h = 0.2. In (d) and (e), the network bonds are colored by the mean value of dissipation of the two nodes in the bond. Additionally, the time-series corresponds to 1000 consecutive steady state configurations. (f) Skewness of the time-integrated entropy production ∆Stot as a function of the integration time t for different bistable bond fractions b, showing a pronounced nonmonotonic dependence. (g) Fraction of time-integrated entropy production fluctuations lying above the mean, ⟨T+(t)⟩= P(∆Stot > ⟨∆Stot⟩), demonstrating a finite-time bias with ⟨T+(t)⟩< 1/2. (h) Characteristic integration time t∗at which the skewness is maximal, as a function of the bistable bond fraction b. Increasing the fraction of bistable bonds systematically amplifies finite-time asymmetries in cumulative entropy production and shifts the characteristic timescale to shorter values, demonstrating that mechanical nonlinearity enhances emergent non-Gaussian entropy production statistics at experimentally relevant finite times
FIG. 5. Entropy production and finite-time fluctuations in active–bistable mechanical networks. (a) Example disordered two-dimensional spring network with a fraction of hot nodes (red, temperature Thot) and cold nodes (blue, Tcold). Thin green bonds denote linear springs, while thick green bonds indicate bistable springs. (b,c) Average entropy production rate as a function of the fraction of hot nodes h at fixed bistable bond fraction b = 0.5 (b), and as a function of the bistable bond fraction b at fixed h = 0.2 (c). Symbols show inferred values from training and test data, while solid lines indicate theoretical predictions for the total entropy production rate. (d) Spatial maps of the inferred local entropy production rate for increasing hot-node fraction h at fixed b = 0.5. (e) Spatial maps of the inferred local entropy production rate for increasing bistable bond fraction b at fixed h = 0.2. In (d) and (e), the network bonds are colored by the mean value of dissipation of the two nodes in the bond. Additionally, the time-series corresponds to 1000 consecutive steady state configurations. (f) Skewness of the time-integrated entropy production ∆Stot as a function of the integration time t for different bistable bond fractions b, showing a pronounced nonmonotonic dependence. (g) Fraction of time-integrated entropy production fluctuations lying above the mean, ⟨T+(t)⟩= P(∆Stot > ⟨∆Stot⟩), demonstrating a finite-time bias with ⟨T+(t)⟩< 1/2. (h) Characteristic integration time t∗at which the skewness is maximal, as a function of the bistable bond fraction b. Increasing the fraction of bistable bonds systematically amplifies finite-time asymmetries in cumulative entropy production and shifts the characteristic timescale to shorter values, demonstrating that mechanical nonlinearity enhances emergent non-Gaussian entropy production statistics at experimentally relevant finite times
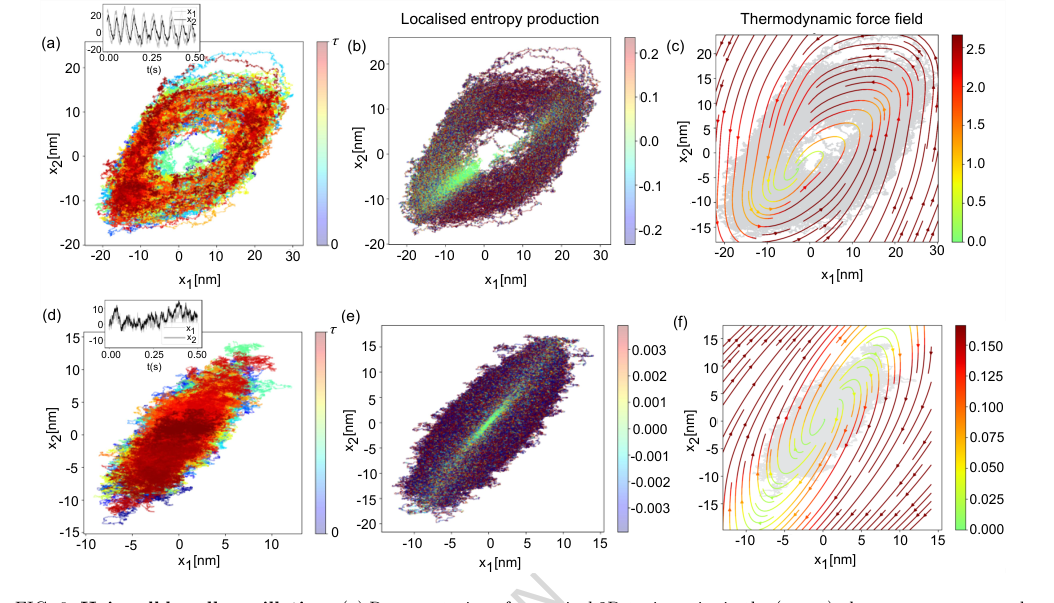 FIG. 6. Hair-cell bundle oscillation. (a) Representation of numerical 2D-trajectories in the (x1, x2) phase space correspond- ing to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the oscillatory nature of dynamics for Fmax = 57.14 pN and S = 0.94. (b) The local entropy production rate (in units of kB/s) is computed using the neural network representation. It captures the active state of dynamics. The colours are for comparative visualisation and do not represent the true value. (c) Thermodynamic force field of the oscillatory state of the dynamics. (d) Representation of numerical 2D-trajectories in the (x1, x2) phase space corresponding to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the quiescent (non-oscillatory) state of dynamics for Fmax = 40 pN and S = 1. (e) Entropy production rate (in units of kB/s) is locally computed along such trajectories. The colours are for comparative visualisation and do not represent the true value. (f) Thermodynamic force field of the oscillatory state of the dynamics. The colour scale of local entropy production is thresholded symmetrically between [−10× median, 10 × median] for the oscillatory case and [−500 × median, 500× median] for the quiescent case, while the colour scale for the force field of both cases is thresholded between [0, median]. The other system parameters remain the same as mentioned in Fig.(4) of Ref. [12]: γ1 = 2.8 µN s/m, γ2 = 10 µN s/m, kgs = 0.75 pN/nm, ksp = 0.6 pN/nm, D = 61 nm, N = 50, ∆G = 10kBT, kBT = 4.143 pNnm and Teff = 1.5T
FIG. 6. Hair-cell bundle oscillation. (a) Representation of numerical 2D-trajectories in the (x1, x2) phase space correspond- ing to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the oscillatory nature of dynamics for Fmax = 57.14 pN and S = 0.94. (b) The local entropy production rate (in units of kB/s) is computed using the neural network representation. It captures the active state of dynamics. The colours are for comparative visualisation and do not represent the true value. (c) Thermodynamic force field of the oscillatory state of the dynamics. (d) Representation of numerical 2D-trajectories in the (x1, x2) phase space corresponding to 5s simulation sampled at 100 kHz. The colorbar indicates progression along the trajectory. The inset plot indicates the quiescent (non-oscillatory) state of dynamics for Fmax = 40 pN and S = 1. (e) Entropy production rate (in units of kB/s) is locally computed along such trajectories. The colours are for comparative visualisation and do not represent the true value. (f) Thermodynamic force field of the oscillatory state of the dynamics. The colour scale of local entropy production is thresholded symmetrically between [−10× median, 10 × median] for the oscillatory case and [−500 × median, 500× median] for the quiescent case, while the colour scale for the force field of both cases is thresholded between [0, median]. The other system parameters remain the same as mentioned in Fig.(4) of Ref. [12]: γ1 = 2.8 µN s/m, γ2 = 10 µN s/m, kgs = 0.75 pN/nm, ksp = 0.6 pN/nm, D = 61 nm, N = 50, ∆G = 10kBT, kBT = 4.143 pNnm and Teff = 1.5T
Результаты, ограничения и заключение
Экспериментальный дизайн и базовые уровни
Подход авторов к беспощадному доказательству своих математических утверждений основан на структуре, основанной на данных, которая объединяет схему вывода краткосрочного термодинамического соотношения неопределенности (TUR) с глубокими нейронными сетями. Основной экспериментальный дизайн включает:
-
Математическая основа: Метод нацелен на вывод диссипативного (термодинамического) поля сил $F(x,t)$ и соответствующего флуктуирующего производства энтропии $\sigma$ путем максимизации вариационной целевой функции, выведенной из TUR. В частности, цель состоит в максимизации $\sigma_{TUR}(t) := \max_{d} \frac{1}{\Delta t} \frac{2 \langle J_{\Delta t}^d \rangle^2}{\text{Var}(J_{\Delta t}^d)}$, где $J_{\Delta t}^d$ — обобщенный ток. Эта формулировка позволяет выводить информацию без предварительного знания лежащих в основе динамических уравнений системы.
-
Архитектура машинного обучения: Многослойная нейронная сеть используется для аппроксимации оптимального поля коэффициентов $d(x,t)$, которое пропорционально полю термодинамических сил $F(x,t)$. Для зависящих от времени процессов сеть расширена для приема времени $t$ в качестве дополнительного входного сигнала, а цель обучения агрегируется по мини-пакетам выбранных точек времени для обеспечения временной гладкости и возможности обобщения.
-
Генерация и валидация данных: Численные траектории генерируются для различных систем. Для стационарных процессов траектории разделяются на обучающие и валидационные наборы. Параметры оптимизируются посредством градиентного подъема на обучающих данных, а окончательная модель выбирается на основе ее производительности на отложенных валидационных данных для предотвращения переобучения.
«Жертвы» (базовые модели или сложные сценарии), против которых был разработан этот подход и против которых оценивалась его производительность, включают:
- Аналитически разрешимые системы: Для систем, где поле термодинамических сил и производство энтропии известны аналитически (например, гармонические броуновские гираторы, N-мерные линейные гираторы, грубо усредненные линейные гираторы), выведенные результаты напрямую сравниваются с этими теоретическими эталонами. Это обеспечивает окончательную количественную валидацию.
- Сложные нелинейные системы: Для систем, где аналитические решения неразрешимы или трудно предсказуемы априори (например, ангармонические броуновские гираторы, активные бистабильные механические сети, колебания пучка волосковых клеток), демонстрируется способность метода выявлять физически интуитивные и согласованные пространственно-временные структуры рассеяния. Эти системы представляют собой вызов для традиционных методов, опирающихся на явные динамические уравнения.
- Зависящие от времени процессы: Протокол стирания битов, явно зависящий от времени неравновесный процесс, служит испытательным стендом для способности метода обрабатывать изменяющиеся во времени поля сил и скорости производства энтропии, которые являются вычислительно сложными для традиционных подходов.
- Ограниченный доступ к наблюдениям: Эксперименты по грубому усреднению (размерные и временные) на 3D гармоническом гираторе тестируют надежность метода при наличии только частичных или субвыборочных данных траекторий, имитируя реальные экспериментальные ограничения, такие как скрытые степени свободы или конечные скорости выборки.
Что доказывают доказательства
Представленные в статье доказательства однозначно подтверждают, что основной механизм — объединение краткосрочного TUR с глубокими нейронными сетями для вывода на основе данных — успешно локализует производство энтропии и реконструирует поля диссипативных сил вдоль неравновесных траекторий.
-
Точный вывод поля сил и производства энтропии:
-
Броуновские гираторы: Для 2D гираторов (Рисунок 2) метод точно выводит как локальную скорость производства энтропии, так и поле термодинамических сил. Для гармонического случая выведенная величина поля сил минимальна вблизи минимума потенциала, что коррелирует с производством энтропии, близким к нулю, как теоретически ожидалось. Для нелинейных ангармонических и квартичных гираторов метод выявляет сложные, нетривиальные пространственно-временные структуры рассеяния (например, четыре вихря в квартичном случае, Рисунок 2(i)), которые было бы чрезвычайно трудно предсказать без этого подхода, основанного на данных.
-
N-мерный гиратор (N=100): Выведенные локальные скорости производства энтропии показывают хорошее визуальное соответствие с аналитическими оценками (Рисунки 4(b) и 4(c)). Количественно, график рассеяния, сравнивающий выведенное и аналитическое общее производство энтропии, дает значение $R^2$ 0.7576 (Рисунок 4(d)), демонстрируя сильную линейную корреляцию, особенно в режимах высокого рассеяния. Это неоспоримое доказательство способности метода масштабироваться и работать точно в более высоких размерностях.
-
Активные бистабильные механические сети: Выведенные средние скорости производства энтропии (символы на Рисунках 5(b) и 5(c)) удивительно хорошо согласуются с теоретическими предсказаниями (сплошные линии) при различных долях горячих узлов и долях бистабильных связей. Пространственные карты локального производства энтропии (Рисунки 5(d) и 5(e)) наглядно иллюстрируют, как рассеяние гетерогенно организовано, доказывая способность метода в сложных, взаимодействующих системах.
- Колебания пучка волосковых клеток: Метод успешно вычисляет локальное производство энтропии и поля термодинамических сил как для колебательного, так и для спокойного состояний (Рисунки 6(b,c,e,f)), захватывая активную динамику и различая различные динамические режимы. Например, сильно циркулирующее поле сил в колебательном состоянии является явным признаком сильной необратимости.
- Протокол стирания битов: Для зависящего от времени стирания битов метод разрешает локальное производство энтропии вдоль отдельных траекторий (Рисунки 7(d) и 7(f)), показывая всплески и подавления, которые напрямую связаны с необратимой динамикой. Усредненные по времени скорости производства энтропии (Рисунки 8(a) и 8(b)) подтверждают эти наблюдения, выделяя различные особенности для разных путей стирания.
-
-
Надежность и соответствие фундаментальной физике:
- Локальная теорема флуктуаций: Важным доказательством является демонстрация того, что выведенное локальное производство энтропии удовлетворяет теореме флуктуаций. Несмотря на значительные различия в распределениях вероятностей локального производства энтропии, зависящие от региона, вставка на Рисунке 3(c) показывает, что отношение флуктуаций $\ln[P(dS_{tot})/P(-dS_{tot})]$ демонстрирует линейную зависимость от $dS_{tot}$ с единичным наклоном во всех выбранных регионах. Это мощная, основанная на данных валидация физической согласованности выведенной величины.
- Надежность при грубом усреднении: Метод оказывается надежным при ограниченном доступе к наблюдениям. Для 3D гиратора, подвергнутого размерному и временному грубому усреднению, выведенные скорости флуктуирующего производства энтропии хорошо согласуются с аналитическими эталонами (Рисунки 9(b) и 9(d)). Графики рассеяния показывают сильные линейные корреляции со значениями $R^2$ 0.862 и 0.890 (Рисунки 9(c) и 9(e)), подтверждая, что метод дает статистически согласованные результаты даже при наличии скрытых степеней свободы или субвыборочных данных.
Таким образом, статья предоставляет окончательные, неоспоримые доказательства того, что ее основной механизм работает на практике путем:
* Достижения высокого количественного соответствия известным аналитическим решениям.
* Выявления физически согласованных и интерпретируемых пространственно-временных закономерностей в сложных, нелинейных системах, где аналитические решения недоступны.
* Демонстрации соблюдения фундаментальных термодинамических принципов, таких как теорема флуктуаций, на локальном уровне.
* Показания надежности и статистической согласованности при различных формах грубого усреднения данных.
«Жертвы» действительно были побеждены, поскольку предлагаемый метод преодолевает ограничения традиционных подходов, которые либо требуют априорного знания динамики, борются с высокой размерностью, либо не предоставляют локализованных, разрешенных по траектории сведений о производстве энтропии и диссипативных силах.
Ограничения и будущие направления
Хотя представленная структура предлагает мощный новый взгляд на понимание неравновесных систем, важно признать ее текущие ограничения и рассмотреть захватывающие направления для будущего развития.
Ограничения:
- Производительность в режимах низкого рассеяния: В статье отмечается, что для высокоразмерных систем точность вывода может снижаться в слабо диссипативных областях (вставка на Рисунке 4(e)). Это связано со сниженным эффективным соотношением сигнал/шум, что затрудняет равномерное обобщение нейронной сети на значительно различающиеся масштабы производства энтропии. Повышение надежности в этих сложных режимах остается открытой проблемой.
- Вычислительные ресурсы и требования к данным: Хотя масштабируемое, обучение глубоких нейронных сетей, особенно для высокоразмерных и зависящих от времени систем, все еще может быть вычислительно затратным и требовать значительного количества данных траекторий (например, $2 \times 10^6$ точек для некоторых моделей). Это может представлять практические ограничения для экспериментов с ограниченной доступностью данных.
- Эффекты конечного временного шага: Метод основан на краткосрочном пределе TUR. На практике экспериментальные данные выбираются с конечным временным интервалом $\Delta t$. Хотя в статье предлагается критерий $\Delta t/\tau_{min} \ll 1$, всесторонний анализ того, как большие значения $\Delta t$ влияют на точность и интерпретацию выведенных величин, особенно для высокодинамичных систем, может быть полезен.
- Интерпретация полей сил при грубом усреднении: При применении грубого усреднения выведенное поле сил является эффективным представлением при выбранном разрешении. Для сложных нелинейных систем, где аналитические эталоны для описаний с грубым усреднением недоступны, точная физическая интерпретация этих эффективных полей может потребовать дальнейшего теоретического развития.
- Различие между локальным и полным производством энтропии: Для явно зависящих от времени процессов локальное производство энтропии $dS(t)$, выведенное методом, отличается от полного стохастического производства энтропии на член, связанный с явной временной зависимостью плотности вероятности. Хотя $dS(t)$ захватывает необратимые вклады в среднюю скорость, полная характеристика событий, нарушающих второй закон, потребует учета этого дополнительного члена, который не предоставляется напрямую текущим выводом.
Будущие направления:
Полученные в данной статье результаты закладывают прочную основу для многочисленных будущих исследований, стимулируя критическое мышление с различных точек зрения:
-
Расширение применимости на разнообразные экспериментальные системы:
- Биологические контексты: Как этот метод может быть адаптирован для количественной оценки и пространственно-временной локализации рассеяния энергии в реальных биологических системах, таких как клеточные сигнальные сети, метаболические пути или работа молекулярных моторов в экспериментах с отдельными молекулами? Может ли он выявить новые механизмы преобразования энергии или регуляции в живых клетках?
- Физика активной материи: Может ли структура быть применена к системам активной материи, таким как самодвижущиеся коллоиды или колонии бактерий, для понимания того, как локализованное рассеяние энергии приводит к коллективному поведению, самоорганизации и фазовым переходам? Какие новые идеи о турбулентности активной материи или формировании паттернов могут возникнуть?
-
Развитие теоретических и алгоритмических основ:
- За пределами переторможенной динамики: Текущая работа фокусируется на переторможенных диффузионных процессах. Как метод может быть расширен и строго валидирован для недоторможенных систем, где инерционные эффекты значительны, или для немарковских динамик, которые распространены во многих сложных системах?
- Надежность в режимах низкого соотношения сигнал/шум: Какие новые архитектуры нейронных сетей, методы регуляризации или стратегии физически информированного машинного обучения могли бы повысить точность и возможности обобщения метода в высокоразмерных, слабо диссипативных режимах? Может ли включение более явных физических ограничений в цель обучения помочь?
- Вывод в реальном времени: Может ли алгоритм вывода быть оптимизирован для обработки потоков экспериментальных данных в реальном времени или почти в реальном времени? Это было бы критически важно для реализации стратегий адаптивной выборки или обратной связи в реальных экспериментах.
-
Использование локализованного энтропии для обратного проектирования и управления:
- Стратегии оптимального управления: Учитывая способность локализовать рассеяние, как эта информация может быть использована для разработки оптимальных протоколов управления, которые минимизируют рассеяние энергии для конкретных задач (например, стирание битов, молекулярный транспорт) или для достижения желаемых неравновесных состояний? Может ли это привести к более энергоэффективным наномашинам?
- Обратное проектирование материалов и систем: Может ли метод направлять обратное проектирование активных материалов или биологических сетей с заданными пространственно-временными характеристиками рассеяния? Например, проектирование коллоидных решеток с определенными локальными неравновесными свойствами для самосборки или целевой генерации сил.
- Адаптивная выборка: Может ли выведенное локальное производство энтропии направлять адаптивные стратегии выборки в экспериментах, фокусируя сбор данных на областях с высоким рассеянием для повышения статистической эффективности и выявления редких событий?
-
Исследование связей с теорией информации и термодинамикой:
- Компромиссы между информацией и энергией: Как локализованное производство энтропии связано с обработкой и хранением информации в сложных системах, особенно в биологических контекстах? Может ли эта структура дать новое понимание фундаментальных термодинамических затрат на вычисления или зондирование на наноуровне?
- Теоремы флуктуаций в сложных системах: Дальнейшее исследование локальных теорем флуктуаций в сильно нелинейных, зависящих от времени и грубо усредненных системах может углубить наше понимание неравновесной статистической механики.
Эти будущие направления подчеркивают преобразующий потенциал этого подхода, основанного на данных, выходящего за рамки глобальных средних к детальному пониманию рассеяния энергии и необратимости в сложных системах, с последствиями для фундаментальной науки и инженерии.
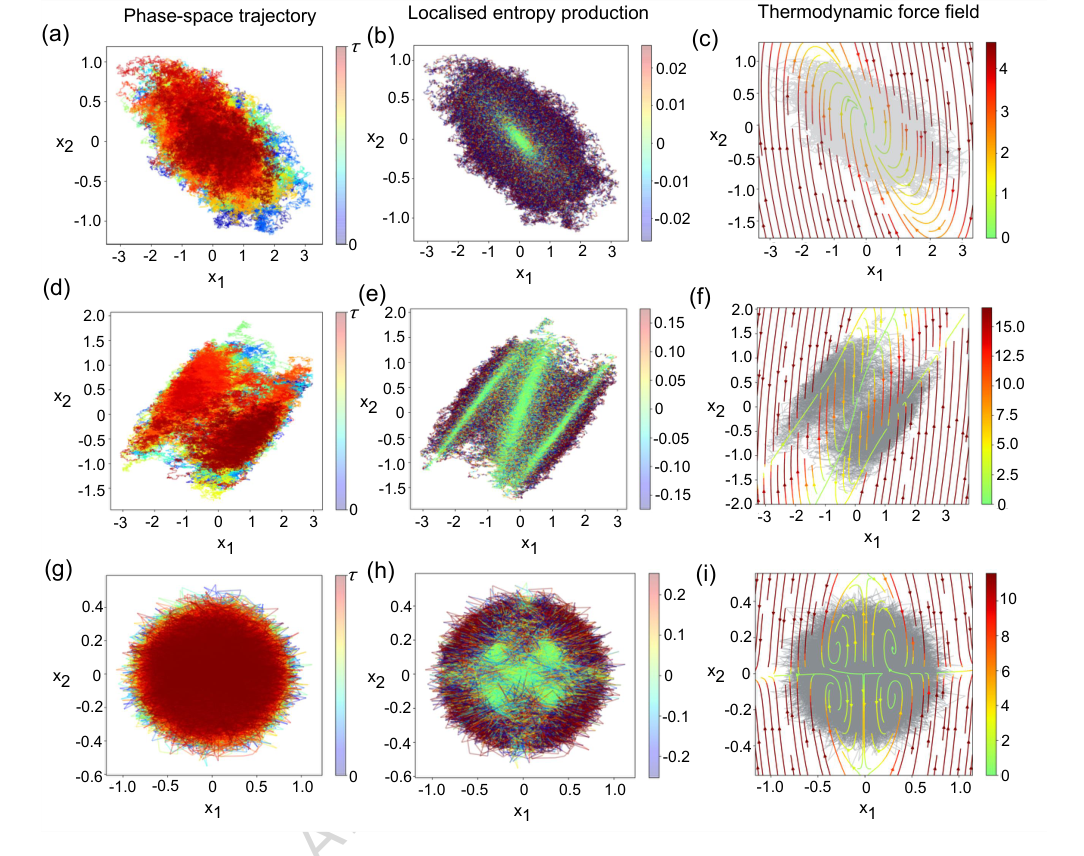 FIG. 2. Local entropy production in Brownian gyrator models. (a) 2D-dimensional trajectories of a Brownian gyrator system with harmonic confining potential. [Parameters: k1 = 1, k2 = 2, γ = 1, θ = π/4, D1 = 1, D2 = 0.1]. (b) local entropy production rate and (c) thermodynamic force field for the system with harmonic confinement - estimated using the neural network representation. (d) 2D-dimensional trajectories of a Brownian gyrator system with a bi-stable confining potential. [Parameters: k = 1, b = 1, γ = 1, θ = π/4, D1 = 1, D2 = 0.1] (e) local entropy production rate and (f) thermodynamic force field estimated using the neural network representation. (g) 2D-dimensional trajectories of a Brownian gyrator system with a quartic confining potential. [Parameters: k1 = k2 = 10, γ = 1, θ = π/4, D1 = 10, D2 = 1] (h) local entropy production rate and (i) thermodynamic force field estimated using the neural network representation. The colours corresponding to the local entropy production rate (in units of kB/s) of the gyrators are thresholded between [−α median, α median] , where α (typically 20 −50) multiplies the median of the corresponding local entropy production dataset. Values outside these ranges are clipped for visualisation purposes to prevent rare large fluctuations from dominating the colour mapping. Similarly, the thermodynamic force field values for the gyrators are thresholded within [0, median]. The numerical trajectories are usually generated for 2000s with a sampling rate of 1 kHz - from which trajectory traces of 500s are shown in the plots. The colorbars in panels (a), (d), and (e) indicate the progression along the trajectory
FIG. 2. Local entropy production in Brownian gyrator models. (a) 2D-dimensional trajectories of a Brownian gyrator system with harmonic confining potential. [Parameters: k1 = 1, k2 = 2, γ = 1, θ = π/4, D1 = 1, D2 = 0.1]. (b) local entropy production rate and (c) thermodynamic force field for the system with harmonic confinement - estimated using the neural network representation. (d) 2D-dimensional trajectories of a Brownian gyrator system with a bi-stable confining potential. [Parameters: k = 1, b = 1, γ = 1, θ = π/4, D1 = 1, D2 = 0.1] (e) local entropy production rate and (f) thermodynamic force field estimated using the neural network representation. (g) 2D-dimensional trajectories of a Brownian gyrator system with a quartic confining potential. [Parameters: k1 = k2 = 10, γ = 1, θ = π/4, D1 = 10, D2 = 1] (h) local entropy production rate and (i) thermodynamic force field estimated using the neural network representation. The colours corresponding to the local entropy production rate (in units of kB/s) of the gyrators are thresholded between [−α median, α median] , where α (typically 20 −50) multiplies the median of the corresponding local entropy production dataset. Values outside these ranges are clipped for visualisation purposes to prevent rare large fluctuations from dominating the colour mapping. Similarly, the thermodynamic force field values for the gyrators are thresholded within [0, median]. The numerical trajectories are usually generated for 2000s with a sampling rate of 1 kHz - from which trajectory traces of 500s are shown in the plots. The colorbars in panels (a), (d), and (e) indicate the progression along the trajectory
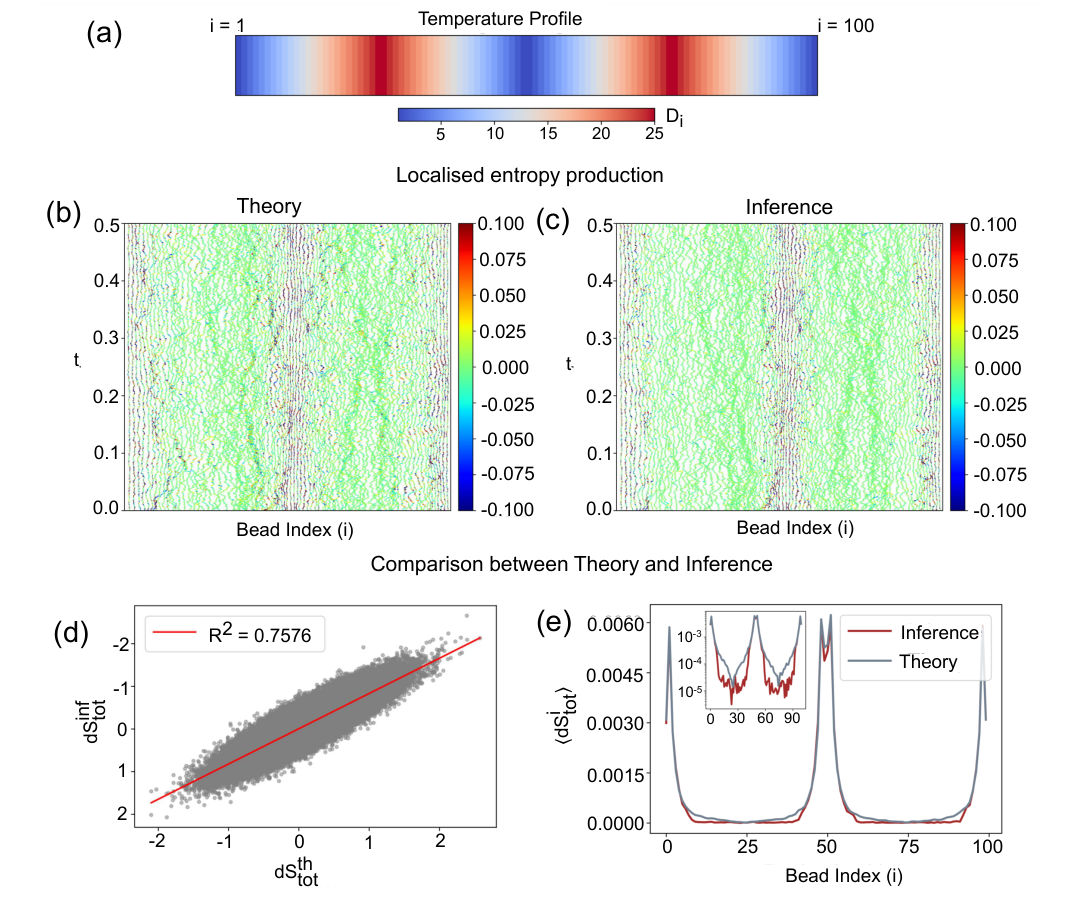 FIG. 4. Bead wise local entropy production for N-dimensional brownian gyrator model. (a) Temperature profile of the N-dimensional gyrator setup. Di denotes the diffusion coefficient of i-th bead as kB = γ = 1. (b) Analytically estimated local entropy production rate (in units of kB/s) of the system. (c) Local entropy production rate (in units of kB/s) inferred from the numerical trajectories using a neural network representation. The colors do not indicate the true values of the fluctuating entropy current, but they are thresholded for better visualisation. (d) Convergence test (R2 test) of the neural network–based estimation of the fluctuating entropy production rate for an N-dimensional Brownian gyrator with N = 100. The inferred and analytical local entropy production rates, averaged over all beads, exhibit a finite spread around the linear fit. (e) Comparison of the inferred average entropy production for each bead with the corresponding theoretical estimate. (Inset) The same data shown on a logarithmic (y-) scale reveals that dissipation of beads associated with low irreversible signature (entropy production) are challenging for the neural network to capture, resulting in a mismatch with the theoretical prediction
FIG. 4. Bead wise local entropy production for N-dimensional brownian gyrator model. (a) Temperature profile of the N-dimensional gyrator setup. Di denotes the diffusion coefficient of i-th bead as kB = γ = 1. (b) Analytically estimated local entropy production rate (in units of kB/s) of the system. (c) Local entropy production rate (in units of kB/s) inferred from the numerical trajectories using a neural network representation. The colors do not indicate the true values of the fluctuating entropy current, but they are thresholded for better visualisation. (d) Convergence test (R2 test) of the neural network–based estimation of the fluctuating entropy production rate for an N-dimensional Brownian gyrator with N = 100. The inferred and analytical local entropy production rates, averaged over all beads, exhibit a finite spread around the linear fit. (e) Comparison of the inferred average entropy production for each bead with the corresponding theoretical estimate. (Inset) The same data shown on a logarithmic (y-) scale reveals that dissipation of beads associated with low irreversible signature (entropy production) are challenging for the neural network to capture, resulting in a mismatch with the theoretical prediction
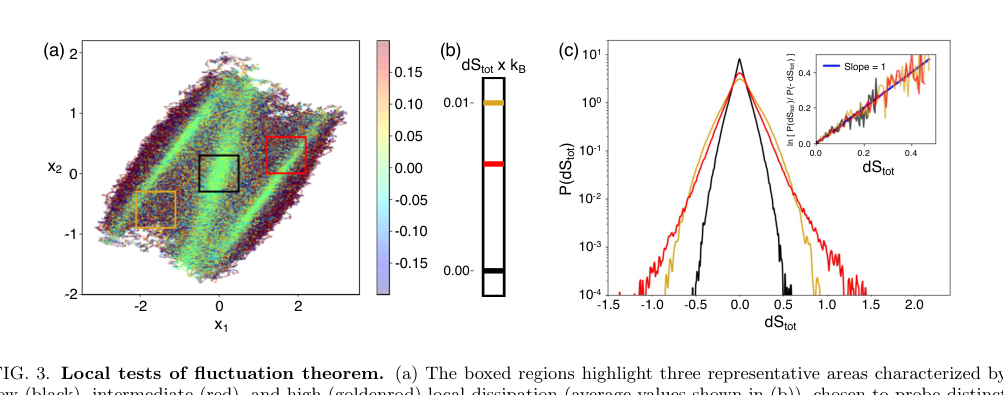 Figure 4. (b) depicts the local entropy production using the theoretically known form of F (x), while Figure 4(c) shows the same obtained from solving the inference algo- rithm. As we see, there is good visual agreement between the theory and the results obtained from the inference al- gorithm. To quantify the agreement between theory and infer- ence, Figure 4(d) shows a scatter plot comparing the analytically computed and learned entropy production, summed over all beads. The data follow a clear linear trend with an R2 value of 0.7576, with noticeably better agreement in the high-dissipation regime. To investigate the origin of the remaining spread, Figure 4(e) shows the time-averaged entropy production of each bead. This re- veals a separation of roughly two to three orders of mag- nitude between beads with high and low entropy produc- tion, and shows that the discrepancy between theory and inference is noticeably high at the low-dissipation beads
Figure 4. (b) depicts the local entropy production using the theoretically known form of F (x), while Figure 4(c) shows the same obtained from solving the inference algo- rithm. As we see, there is good visual agreement between the theory and the results obtained from the inference al- gorithm. To quantify the agreement between theory and infer- ence, Figure 4(d) shows a scatter plot comparing the analytically computed and learned entropy production, summed over all beads. The data follow a clear linear trend with an R2 value of 0.7576, with noticeably better agreement in the high-dissipation regime. To investigate the origin of the remaining spread, Figure 4(e) shows the time-averaged entropy production of each bead. This re- veals a separation of roughly two to three orders of mag- nitude between beads with high and low entropy produc- tion, and shows that the discrepancy between theory and inference is noticeably high at the low-dissipation beads
Связи с другими областями
Математический каркас
Чисто математическим ядром данной работы является вариационная структура оптимизации, предназначенная для вывода скрытого поля сил из зашумленных данных траекторий. Это достигается путем максимизации специфического соотношения сигнал/шум — квадрата среднего к дисперсии обобщенного тока, где неизвестное поле сил надежно параметризуется глубокой нейронной сетью.
Смежные области исследований
Теория оптимального управления
Статья явно проводит связь с теорией оптимального управления, отмечая, что вариационное представление скорости производства энтропии (Уравнение (9)) является устоявшейся формой в этой области. В оптимальном управлении цель часто состоит в том, чтобы найти управляющую функцию, которая оптимизирует заданный функционал цели, который может зависеть от траекторий системы или статистических средних. Здесь поле термодинамических сил $d(\mathbf{x},t)$ действует как такая функция, влияя на динамику системы для максимизации отношения $2 \langle J_{\Delta t}^d \rangle^2 / \text{Var}(J_{\Delta t}^d)$. Использование глубоких нейронных сетей для параметризации этого поля сил и градиентных методов для его оптимизации является современным подходом к решению сложных, основанных на данных задач оптимального управления, особенно когда аналитические решения труднодостижимы. Эта стратегия аналогична обучению оптимального закона обратной связи на основе наблюдаемого поведения системы. Для связанного подхода, объединяющего оптимальное управление с нейронными сетями, см. Yan, Touchette, and Rotskoff (2022, Physical Review E).
Статистический вывод для стохастических процессов
Данная работа вносит значительный вклад в статистический вывод для стохастических процессов, особенно в неравновесных системах. Задача заключается в выводе ненаблюдаемых параметров или полей сил непосредственно из экспериментальных данных траекторий без предварительного знания лежащих в основе динамических уравнений. Представленный метод использует краткосрочный предел термодинамического соотношения неопределенности (TUR) для предоставления не зависящей от модели схемы вывода поля диссипативных сил и локального производства энтропии. Это контрастирует с традиционными методами, которые могут опираться на специфические модельные предположения (например, уравнения Фоккера-Планка) или требовать возмущения системы. Способность извлекать физически значимые величины, такие как поле термодинамических сил, из зашумленных, высокоразмерных данных является ключевой проблемой в этой области. Соответствующие работы в этой области включают Frishman and Ronceray (2020, Physical Review X) и Manikandan et al. (2020, Physical Review Letters), которые исследуют вывод сил и производства энтропии на основе данных.
Физически информированное машинное обучение
Хотя это явно не обозначено, методология в значительной степени соответствует принципам физически информированного машинного обучения (PIML). Нейронная сеть обучается не на произвольной функции потерь, а на цели, выведенной непосредственно из фундаментального физического принципа: термодинамического соотношения неопределенности (TUR). Это физическое ограничение, выраженное в Уравнении (9), направляет процесс обучения, гарантируя, что выведенное поле диссипативных сил является физически согласованным и осмысленным. Этот подход интеграции физического закона в цель машинного обучения позволяет создавать более надежные и интерпретируемые модели, особенно в сценариях с ограниченными или зашумленными данными, путем встраивания знаний предметной области в архитектуру обучения. Этот подход представляет собой мощную парадигму для научных открытий, где модели машинного обучения являются не просто интерполяторами данных, а инструментами для раскрытия лежащих в основе физических законов. Общий обзор PIML можно найти в Raissi, Perdikaris, and Karniadakis (2019, Journal of Computational Physics).