의료 통신에서의 수어 인식을 위한 레이더 기반 영상화
This paper introduces a privacy-preserving radar system for recognizing Italian Sign Language in medical settings, achieving high accuracy.
배경 및 학문적 계보
병원 응급실 환경을 상상해 보라. 이곳에서는 신속하고 정확하며 매우 개인적인 소통이 필수적이다. 수어에 의존하는 청각 및 난청 환자들에게 이러한 상황은 종종 심각한 소통 장벽을 야기한다. 숙련된 통역사가 최상의 해결책이지만, 즉각적으로 항상 이용 가능한 것은 아니다. 이러한 결정적인 격차는 의료 분야에서 자동 수어 인식(Sign Language Recognition, SLR)이라는 분야를 탄생시켰다. 연구자들은 공평한 의료 서비스를 제공하기 위해서는 실시간으로 수어를 텍스트나 음성으로 번역할 수 있는 기계가 필요하다는 것을 깨달았다. 그러나 병원 환경에서 이를 수행하는 것은 기술 세계가 완전히 예측하지 못했던 거대하고 독특한 제약 조건을 도입했다.
기존 접근 방식의 근본적인 "문제점"은 정확성과 개인 정보 보호 간의 심각한 충돌이다. 역사적으로 SLR은 두 가지 주요 방법에 의존해 왔다. 첫 번째는 센서가 장착된 장갑과 같은 웨어러블 기술이었다. 이는 매우 정확했지만, 투박하고 수어의 자연스러운 흐름을 방해하며, 수어에서 중요한 안면 표정과 같은 비수지적 단서를 완전히 놓쳤다. 두 번째, 더 현대적인 접근 방식은 고해상도 RGB 및 깊이 카메라에 의존했다. 그러나 임상 환경에서 지속적인 비디오 녹화를 배포하는 것은 심각한 개인 정보 침해이다. 병원은 환자의 익명성에 관한 엄격한 윤리적 및 법적 규제를 준수해야 한다. 더욱이 카메라 기반 모델은 저조도 환경이나 복잡한 병실에서 어려움을 겪는다. 일부 초기 레이더 기반 시스템은 이러한 개인 정보 보호 문제를 해결하려고 시도했지만, 종종 일반적인 손 흔들림만을 인식하는 매우 작은 어휘 집합으로 인해 근본적으로 제한되었으며, 실제 환자-의사 소통에 필요한 복잡하고 구체적인 의료 용어는 인식하지 못했다. 본 논문의 저자들은 기존 모델이 환자의 신원을 침해하거나 의학적으로 유용하기에 어휘가 부족했기 때문에 혁신해야만 했다.
저자들이 이 문제를 어떻게 해결했는지 이해하기 위해, 그들의 레이더 기술에 사용된 매우 전문화된 도메인 용어를 직관적이고 일상적인 비유로 분해해 보자.
- Range Doppler Maps (RDM): 뉴스에서 나오는 일반적인 날씨 레이더를 상상해 보라. 거대한 폭풍 구름을 주 전체에 걸쳐 추적하는 대신, 사람의 손의 정확한 거리와 속도를 추적한다. RDM은 본질적으로 컴퓨터에게 "물체가 정확히 0.5미터 떨어져 있고, 초속 2미터로 우리 쪽으로 움직이고 있다"고 알려주는 시각적인 히트맵이다.
- Moving Target Indication (MTI): 이것을 시각을 위한 초고성능 노이즈 캔슬링 헤드폰 한 쌍이라고 생각하라. 병실에는 침대, 벽, 의료 모니터와 같은 많은 "정적 노이즈"가 있다. MTI 필터는 움직이지 않는 모든 것을 완전히 음소거하여 레이더가 환자의 손과 몸의 동적인 움직임에만 집중할 수 있도록 한다.
- Micro-Doppler Signatures: 멀리서 걸어오는 친구의 독특한 걸음걸이나 " swagger"만으로도 그 친구를 알아볼 수 있다고 상상해 보라. Micro-Doppler signatures는 레이더에서 그 swagger에 해당하는 것이다. 이것은 손가락과 손목의 작고 미묘한 떨림을 포착하여 모든 특정 수어 제스처에 대한 고유한 운동학적 지문을 생성한다.
- Latent Representations (Embeddings): 1,000페이지에 달하는 방대한 교과서를 가장 중요한 사실만 담은 매우 압축된 요약본으로 요약한다고 상상해 보라. 본 논문의 신경망은 방대한 양의 원시 레이더 데이터를 받아 실시간 번역을 달성하기 위해 번개처럼 빠른 속도로 처리할 수 있도록 작고 밀집된 수학적 표현으로 압축한다.
다음은 저자들이 레이더를 구성하고 인공지능 모델을 훈련하는 데 사용한 주요 수학적 표기법 및 매개변수에 대한 분석이다.
| Notation / Parameter | Description |
|---|---|
| $60$ GHz | 미세한 움직임을 포착하는 데 사용된 밀리미터파 레이더 센서의 중심 주파수이다. |
| $1$ MHz | 레이더 시스템의 샘플링 속도이다. |
| $31$ | 레이더에 구성된 송신 전력 레벨이다. |
| $40$ dB | 레이더 신호에 적용된 중간 주파수(IF) 이득이다. |
| $0.0312$ m | 공간 범위 해상도로, 레이더가 약 3센티미터 떨어진 물체를 구별할 수 있음을 의미한다. |
| $1.60$ m | 레이더 설정의 최대 유효 범위로, 의사 맞은편에 앉아 있는 환자에게 이상적이다. |
| $4.11$ m/s | 왜곡 없이 정확하게 추적할 수 있는 레이더의 최대 속도이다. |
| $0.0321$ m/s | 속도 해상도로, 매우 느리고 미묘한 손 움직임을 감지할 수 있다. |
| $0.077$ s | 각 레이더 프레임 획득을 위한 반복 시간이다. |
| $-90$ dB | 데이터 전처리 중 배경 노이즈를 필터링하는 데 사용되는 스펙트럼 임계값이다. |
| $\beta_1 = 0.9, \beta_2 = 0.999$ | 신경망 훈련 단계에서 사용되는 AdamW 옵티마이저의 감쇠율이다. |
| $5 \cdot 10^{-5}$ | 오토인코더 네트워크를 훈련하는 데 사용되는 학습률이다. |
| $10^{-4}$ | 트랜스포머 분류기 네트워크를 훈련하는 데 사용되는 학습률이다. |
| $5 \cdot 10^{-6}$ | 신경망이 훈련 데이터에 과적합되는 것을 방지하기 위해 적용되는 가중치 감쇠 매개변수이다. |
문제 정의 및 제약 조건
보이지 않는 파동을 의미로 매핑하기: 근본적인 간극
본 논문이 달성한 성과의 규모를 이해하기 위해서는 시스템이 어디에서 시작하여 어디에 도달해야 하는지를 정확히 정의할 필요가 있다.
시작점 (입력): 시스템은 카메라 렌즈를 통해 세상을 보지 않는다. 대신 60 GHz 밀리미터파 라디오 신호를 방출하고 인체에서 반사되어 돌아오는 에코를 수신한다. 이러한 에코는 수학적으로 Range Doppler Maps (RDM) 및 Moving Target Indications (MTI)로 변환된다. 제로베이스 독자를 위해, 색상이나 모양을 보여주지 않고 단지 움직이는 물체가 얼마나 멀리 떨어져 있는지(Range)와 얼마나 빠르게 움직이는지(Doppler velocity)를 알려주는 히트맵을 상상해 보라. 수학적으로 입력은 고차원 행렬의 시퀀스 $X = \{x_1, x_2, \dots, x_T\}$이며, 여기서 각 프레임 $x_t \in \mathbb{R}^{128 \times 1024}$이고, 시퀀스 길이 $T$는 사람이 제스처를 취하는 시간에 따라 13에서 66 프레임까지 다양하다.
목표 상태 (출력): 원하는 출력은 단일하고 매우 구체적인 의미론적 레이블이다. 시스템은 이 라디오 맵 시퀀스를 $C = 126$개의 서로 다른 이탈리아 수어(LIS) 클래스(100개의 의학 용어 및 26개의 알파벳 문자)에 대한 확률 분포로 매핑해야 한다. 우리는 수학적 매핑 함수 $f: X \rightarrow Y$를 찾고 있으며, 여기서 $Y \in \{1, 2, \dots, 126\}$이다.
누락된 연결고리: 여기서 수학적 간극은 매우 크다. 모델은 추상적이고 비시각적인 물리 데이터(반사되는 라디오 파동)를 정확한 언어적 의미로 번역해야 한다. 속도 및 거리 변동의 시퀀스를 보고 자신 있게 "이 특정 질량 이동 패턴은 '폐'가 아니라 '의사'를 의미한다"고 말할 수 있어야 한다.
냉혹한 딜레마: 프라이버시 대 정확도
과학에서 하나의 매개변수를 최적화하면 거의 항상 다른 매개변수가 깨진다. 자동 수어 인식(SLR)에서 연구자들은 정확도와 프라이버시 사이의 고통스러운 줄다리기에 갇혀 있었다.
수어는 매우 복잡하다. 이는 단순히 팔의 넓은 움직임뿐만 아니라 미세한 수동적 단서(정확한 손가락 위치)와 비수동적 단서(얼굴 표정, 입술 움직임, 몸통 이동)에도 의존한다. 전통적인 RGB 및 깊이 카메라는 이 모든 것을 완벽하게 포착하여 높은 정확도를 제공한다. 그러나 병실과 같은 임상 환경에서는 고해상도 카메라를 설치하는 것이 엄격한 환자 프라이버시 법규 및 윤리적 경계를 위반한다.
프라이버시를 달성하기 위해 RADAR를 사용할 수 있다. 레이더는 시각적 세부 정보를 포착하지 않고 움직이는 에너지 덩어리만 보기 때문에 본질적으로 환자의 신원을 모호하게 한다. 그러나 딜레마가 있다. 프라이버시 보호를 위해 레이더로 전환함으로써, 유사한 제스처를 구별하는 데 절대적으로 중요한 미세한 시각적 세부 정보(얼굴 표정 및 손가락 모양과 같은)에 대한 시스템의 시야를 즉시 차단하게 된다. 이전 연구자들은 카메라를 사용하여 프라이버시를 침해하거나, 데이터가 너무 추상적이어서 정확도가 현저히 떨어지는 레이더를 사용하는 두 가지 선택지 사이에서 어려움을 겪었다.
가혹한 벽과 제약
이 문제를 해결하기 위해 저자들은 몇 가지 현실적이고 용납할 수 없는 제약을 극복해야 했다.
- 하드웨어 메모리 벽 (계산 제약):
레이더 데이터는 엄청나게 밀집되어 있다. 단일 제스처는 $128 \times 1024$ 크기의 행렬 시퀀스를 생성한다. 이 원시적이고 고차원적인 비디오와 유사한 시퀀스를 시간적 역학을 종단 간 학습하기 위해 단일 심층 신경망에 직접 공급하려고 하면 수학적 연산이 폭발한다. 저자들은 이것이 과도한 모델 복잡성을 야기하고 GPU 메모리 한계를 즉시 초과한다고 명시적으로 언급한다. 그들은 최신 하드웨어에서 수학을 계산 가능하게 만들기 위해 문제를 두 단계(먼저 공간 압축, 다음 시간 시퀀스 모델링)로 분리해야 했다. - "보이지 않는" 비수동적 단서 (물리적 제약):
레이더는 거시적 움직임(팔과 손)을 포착하는 파장에서 작동하기 때문에 눈썹을 치켜 올리거나 특정 입술 모양과 같은 미세한 움직임을 완전히 놓친다. 많은 수어 단어는 동일한 손 움직임을 공유하고 얼굴 표정으로만 구별되기 때문에, 수학적 모델은 팔의 속도에서 숨겨진 미묘한 운동학적 패턴을 찾아 구분해야 하며, 심각한 정보 부족 상태에서 작동해야 한다. - 가변적인 시간적 역학 (데이터 기반 제약):
인간은 로봇이 아니며 일정한 속도로 제스처를 취하지 않는다. 한 환자는 1초(13 프레임) 안에 단어를 제스처할 수 있지만, 노인 환자는 동일한 단어에 대해 4초(66 프레임)가 걸릴 수 있다. 모델은 시간적으로 불변해야 한다. 고정 길이 입력을 신뢰할 수 없으며, 시간에 따른 장거리 종속성을 추적하기 위해 트랜스포머와 같은 고급 시퀀스 모델링을 요구하는 가변 길이 시퀀스를 동적으로 정렬하고 해석해야 한다. - 극심한 데이터 부족:
심층 학습 모델은 데이터에 굶주려 있다. 복잡한 레이더 신호를 126개의 서로 다른 의학적 제스처로 매핑하려면 수만 개의 예제가 필요하다. 본 논문 이전에는 수어에 대한 레이더 데이터셋이 매우 작았으며, 종종 5개 또는 10개의 일반적인 제스처(예: 왼쪽 또는 오른쪽 스와이프)로 제한되었다. 저자들은 문제를 해결하는 데 필요한 데이터가 단순히 존재하지 않는 벽에 부딪혔고, 알고리즘을 훈련하기 전에 25,830개의 제스처 인스턴스로 구성된 대규모 동기화 데이터셋을 처음부터 구축해야 했다.
이 접근 방식은 왜
저자들이 특정 2단계 파이프라인, 즉 사용자 정의 합성곱 오토인코더와 트랜스포머를 선택한 이유를 이해하기 위해서는 먼저 레이더 데이터의 혹독한 현실을 살펴볼 필요가 있다. 60 GHz mm-wave 레이더는 Range Doppler Maps (RDMs)와 Moving Target Indication (MTI) 맵을 생성한다. 이들은 본질적으로 고차원 행렬의 비디오와 유사한 시퀀스로, 프레임당 $128 \times 1024$의 크기를 갖는다.
저자들이 기존의 최첨단(SOTA) 방법이 불충분하다는 것을 깨달은 정확한 순간은 문제의 엄청난 계산량을 고려했을 때였다. 저자들이 명시적으로 언급했듯이, 단일의 거대한 종단 간(end-to-end) 딥 네트워크로 이 문제를 직접 해결하려는 시도는 "과도한 모델 복잡성과 계산 비용"을 초래할 것이다. 레이더 데이터는 고차원적이고 순차적이다. $T$개의 시간 단계에 걸쳐 $128 \times 1024$의 원시 프레임을 표준 3D CNN 또는 순수 트랜스포머에 직접 입력하면 메모리 요구량이 폭발적으로 증가한다.
이를 해결하기 위해 저자들은 문제를 두 개의 별도 단계로 분리했다. 첫째, 공간 데이터를 압축하기 위해 사용자 정의 CNN 오토인코더를 구축했다. ResNet 또는 AlexNet과 같은 유명한 사전 훈련된 SOTA 모델 대신 사용자 정의 모델을 사용한 이유는 무엇인가? 저자들은 레이더 맵이 자연 RGB 이미지와 근본적으로 다르다는 것을 인지했다. 표준 사진의 복잡한 시각적 텍스처가 부족하다. 무거운 사전 훈련된 아키텍처를 사용하면 오히려 성능이 저하될 수 있다. 대신, 잔차 연결(residual connections)을 갖춘 9계층의 사용자 정의 CNN은 방대한 레이더 프레임을 256차원의 매우 압축된 잠재 표현(latent representation)으로 증류한다.
이는 본 방법론의 비교 우위로 이어진다. 오토인코더를 고정하고 256차원 임베딩만을 트랜스포머에 입력함으로써 메모리 병목 현상을 획기적으로 줄인다. 논문에서는 이 2단계 프로세스가 "매 에포크마다 원시 데이터에 대한 전체 종단 간 훈련을 피함으로써 GPU 메모리 제약을 완화한다"고 언급한다. 텍스트에서 이를 명시적으로 $O(N^2)$에서 $O(N)$ 복잡도로의 감소로 표현하지는 않았지만, 구조적 이점은 명확하다. 공간 처리가 시간 처리와 완전히 분리된다.
더욱이, 트랜스포머 분류기는 두 번째 단계에서 질적으로 우수하다. 이는 가변 길이 시퀀스를 자연스럽게 처리하기 때문이다. 인간의 수화는 역동적이다. 본 데이터셋에서 하나의 수화는 $T=13$에서 $T=66$ 프레임까지 지속될 수 있다. 트랜스포머의 셀프 어텐션(self-attention) 메커니즘은 데이터를 고정된 길이의 엄격한 창으로 강제하지 않고 이러한 장거리 시간 종속성을 모델링하는 데 탁월하다. 세 개의 별도 레이더 안테나에서 데이터를 융합하고 표준 RDM과 MTI 맵(정적 배경 노이즈를 제거하는)을 결합함으로써, 모델은 환경 간섭에 대해 믿을 수 없을 정도로 견고해진다.
이 접근 방식은 문제의 제약 조건과 해결책의 속성 간의 완벽한 "결합"을 나타낸다. 의료 환경은 절대적인 개인 정보 보호를 요구하며, 레이더는 식별 가능한 얼굴이 아닌 움직임과 속도만을 포착함으로써 이를 물리적으로 보장한다. 그러나 이는 매우 추상적이고 노이즈가 많으며 계산적으로 무거운 데이터라는 제약을 만든다. 오토인코더는 노이즈를 제거하고 공간 차원을 압축하는 완벽한 필터 역할을 하며, 트랜스포머는 시간 경과에 따른 제스처의 실제 의미를 디코딩하는 완벽한 시간 엔진 역할을 한다.
저자들이 GAN 또는 Diffusion 모델과 같은 다른 인기 있는 최신 접근 방식을 사용하지 않은 이유가 궁금하다면, 솔직히 이 부분에 대해서도 완전히 확신할 수는 없다. 논문에서 이를 명시적으로 언급하거나 거부하지 않았기 때문이다. 그러나 이것이 본질적으로 생성 작업이 아닌 분류 문제(레이더 프레임 시퀀스를 126개의 특정 수화 클래스 중 하나로 매핑)이기 때문에, 새로운 데이터를 합성하도록 설계된 모델은 핵심 분류 제약을 해결하지 않고 불필요한 오버헤드를 도입할 가능성이 높다. 저자들은 오토인코더-트랜스포머 쌍이 아름답게 처리하는 판별 효율성(discriminative efficiency)에 전적으로 집중했다.
수학 및 논리 메커니즘
병원 응급실에서 청각 장애 환자가 의사에게 증상을 설명하려 하는 상황을 상상해 보자. 통역사가 즉시 이용 가능하지 않고, 표준 카메라 기반 AI를 사용하여 수어를 번역하는 것은 막대한 개인 정보 침해 위험을 초래한다. 취약한 의료 상황에서 얼굴과 신체의 고화질 비디오가 녹화되는 것을 원하는 사람은 아무도 없을 것이다.
본 논문은 카메라를 60 GHz 밀리미터파 RADAR로 대체함으로써 이러한 제약을 정확히 해결한다. 시각적 픽셀을 캡처하는 대신, 레이더는 환자로부터 전파를 반사시켜 움직이는 손과 신체의 거리(범위) 및 속도(도플러)를 측정한다. 그 결과는 개인 정보를 보호하는, 얼굴 없는 움직임 지도이다. 그러나 레이더 데이터는 극도로 노이즈가 많고, 고차원적이며, 순차적이다. 저자들은 이 방대한 레이더 에코 스트림을 어떻게 컴팩트한 형식으로 압축하고, 기계가 해당 에코의 시간적 순서를 "읽도록" 가르쳐 126가지의 이탈리아 수어(LIS) 의료 용어 및 문자를 인식하게 할지 알아내야 했다.
비디오와 유사한 레이더 시퀀스 처리의 계산 병목 현상을 극복하기 위해, 문제는 두 단계로 분할되었다. 각 개별 레이더 프레임을 압축하기 위한 컨볼루션 신경망(CNN) 오토인코더와, 시간에 따른 압축된 프레임 시퀀스를 분석하기 위한 트랜스포머 네트워크이다.
솔직히 말해서, 저자들이 텍스트에 정확한 수학 공식을 인쇄하지 않은 이유를 완전히 확신할 수는 없다. 아마도 독자들이 이미 표준 딥러닝 목표에 익숙하다고 가정했을 것이다. 그러나 그들은 트랜스포머 분류기가 "표준 교차 엔트로피 손실을 최소화함으로써" 최적화된다고 명시적으로 밝히고 있다. 따라서 이 전체 시스템의 학습을 구동하는 절대적인 핵심 수학 엔진은 교차 엔트로피 목적 함수이다.
$$ \mathcal{L}_{CE} = - \sum_{i=1}^{C} y_i \log(\hat{y}_i) $$
이 방정식을 분해하여 모델이 레이더 파동을 의료 어휘로 번역하는 방법을 정확히 이해해 보자.
- $\mathcal{L}_{CE}$: 이것은 총 교차 엔트로피 손실이다.
- 논리적 역할: 모델의 궁극적인 "스코어카드" 또는 나침반 역할을 한다. 높은 값은 모델이 매우 혼란스러워한다는 것을 의미하며, 0에 가까운 값은 모델이 수어를 완벽하게 이해한다는 것을 의미한다.
- $\sum_{i=1}^{C}$: 모든 $C$ 클래스(본 논문에서는 $C = 126$ LIS 기호)에 대한 합계 연산자이다.
- 왜 적분 대신 합계인가? 어휘는 연속적인 값의 스펙트럼이 아니라 "의사", "폐", "목"과 같은 고유한 범주의 이산 집합이기 때문이다. 우리는 모든 단어에 대한 페널티를 합산해야 한다.
- $y_i$: Ground-truth 레이블이다.
- 논리적 역할: 이것은 절대적인 진실이다. 환자가 실제로 수행한 올바른 기호에 대해서는 $1$이고, 나머지 125개의 잘못된 기호에 대해서는 $0$이다. 엄격한 필터 역할을 하여, 수학이 올바른 답변에 할당된 확률에만 집중하도록 보장한다.
- $\hat{y}_i$: 트랜스포머의 선형 분류 계층에서 출력된 예측 확률이다.
- 논리적 역할: 이것은 모델의 최선의 추측이며, 0과 1 사이의 숫자로서 레이더 움직임이 단어 $i$에 해당한다고 얼마나 확신하는지를 나타낸다.
- $\log$: 모델의 예측에 적용되는 자연 로그이다.
- 왜 여기서 로그를 사용하는가? 로그는 모델이 확신을 가지고 틀렸을 때 모델에 큰 페널티를 부과한다. 올바른 답변이 "의사"($y_i = 1$)인데 모델이 0.01의 확률을 예측한다면, $\log(0.01)$은 엄청나게 음수 값을 생성한다. 이는 심각한 실수를 했을 때 모델의 가중치를 제자리로 되돌리는 지수적 고무줄처럼 작용한다.
- $-$ (음수 부호): 확률($\hat{y}_i$)은 항상 0과 1 사이이므로, 그 로그 값은 항상 음수이다. 음수 부호를 추가하여 결과를 최적화기가 최소화할 수 있는 양수 "비용"으로 바꾼다.
이 기계적 조립 라인을 통과하는 단일 추상 데이터 포인트의 정확한 수명 주기를 추적해 보자.
먼저, 원시 60 GHz 레이더 파동이 환자의 움직이는 손에 반사되어 센서로 돌아온다. 고속 푸리에 변환(FFT)을 통해 이 원시 신호는 범위 도플러 맵(RDM)으로 변환된다. 이는 움직임이 어디에 있고 얼마나 빠른지를 보여주는 2D 그리드이다. 이 $128 \times 1024$ 그리드는 CNN 오토인코더로 들어간다. 오토인코더는 쓰레기 압축기처럼 작동하여, 거대한 그리드를 9개의 컨볼루션 계층을 통해 압축하여 256차원의 밀집된 잠재 표현 벡터로 만든다.
다음으로, 수어 제스처는 시간이 걸리기 때문에(1~4초), 이 256차원 벡터들의 시퀀스가 정렬된다. 학습 가능한 "클래스 토큰"이 앞에 붙고, 모델이 프레임의 시간적 순서를 알 수 있도록 위치 임베딩이 추가된다. 이 시퀀스는 트랜스포머로 흐른다. 트랜스포머의 다중 헤드 셀프 어텐션 메커니즘은 각 프레임을 다른 모든 프레임과 비교하여 손의 궤적이 시간에 따라 어떻게 변하는지 파악한다. 마지막으로, 전체 시간적 맥락으로 풍부해진 클래스 토큰은 선형 계층을 통해 전달되어 126개의 확률($\hat{y}_i$)을 출력한다. 가장 높은 확률이 최종 번역된 단어이다.
이 메커니즘은 실제로 어떻게 학습하고 수렴하는가? 여기서의 최적화 역학은 모델이 자체 고차원의 무게에 붕괴되는 것을 방지하기 위해 신중하게 조정된다.
저자들이 오토인코더와 트랜스포머를 동시에(end-to-end) 훈련하려고 했다면, GPU 메모리가 폭발하고 손실 지형은 지역 최소값으로 가득 찬 혼란스러운 상태가 되었을 것이다. 대신, 그들은 15 에포크 후에 오토인코더를 고정시킨다. 오토인코더의 가중치를 잠금으로써, 안정적이고 변하지 않는 기반을 만든다.
그 후 트랜스포머는 AdamW 최적화기를 사용하여 700 에포크 동안 훈련된다. 저자들은 그래디언트 클리핑을 최대 노름 5로 명시적으로 설정했다. 손실 지형에서 레이더 데이터는 때때로 갑작스럽고 거대한 오류(손실의 스파이크)를 발생시킬 수 있으며, 이는 일반적으로 그래디언트 폭발을 일으켜 모델의 학습된 가중치를 파괴할 수 있다. 그래디언트 클리핑은 속도 제한 역할을 하여, 손실 지형이 아무리 가파르더라도 모델이 안전한 크기의 단계로만 하강하도록 보장한다. $5 \cdot 10^{-6}$의 가중치 감쇠(신경 가중치가 너무 커져 훈련 데이터를 암기하는 것을 방지하는 부드러운 중력과 같은 역할)와 결합하여, 모델은 93.6%의 인상적인 정확도로 부드럽게 수렴하며, 보이지 않는 전파를 통해 복잡한 인간 언어를 이해할 수 있음을 증명한다.
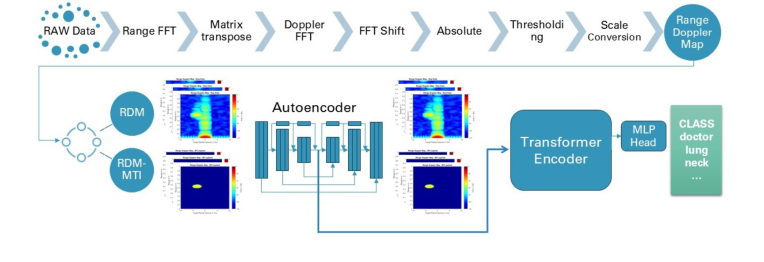 Figure 1. Overview of the end-to-end architecture of the proposed method
Figure 1. Overview of the end-to-end architecture of the proposed method
결과, 한계점 및 결론
외국의 병원에서 언어가 통하지 않는 의사에게 심각한 가슴 통증을 설명해야 하는 상황을 상상해 보십시오. 만약 청각 장애가 있고 이탈리아 수어(LIS)와 같은 시각-수어 체계를 주 언어로 사용한다면 어떻게 될까요? 통역사가 즉시 이용 가능하지 않다면, 의사소통의 장벽은 생명을 위협할 수 있습니다.
과거 기술자들은 병실에 RGB(표준 비디오) 카메라를 설치하여 수어를 자동으로 텍스트로 번역하는 방식으로 이 문제를 해결하려 했습니다. 하지만 이는 심각한 문제를 야기합니다. 바로 개인 정보 보호입니다. 병원은 매우 민감한 공간입니다. 환자들은 취약한 상태에서 고화질 카메라에 자신들의 모습이 녹화되는 것을 원하지 않습니다. 더욱이, 카메라는 악명 높게 까다롭습니다. 조명이 어둡거나 배경이 복잡하면 제대로 작동하지 않습니다.
본 논문은 공상 과학 소설처럼 들리는 획기적인 해결책을 제시합니다. 바로 60 GHz 밀리미터파(mm-wave) 레이더를 사용하여 수어를 "읽는" 것입니다. 사람의 얼굴이나 신체를 식별하는 시각적 픽셀을 캡처하는 대신, 레이더는 환자에게 전파를 쏘고 손과 팔의 미세한 움직임과 속도를 측정합니다. 레이더는 사람을 보지 않고 언어의 운동학(kinematics)을 감지합니다.
저자들이 이 개인 정보 보호를 유지하는 번역 시스템을 어떻게 설계했는지 자세히 살펴보겠습니다.
제약 조건 및 수학적 문제
레이더 데이터는 일반 사진과 다릅니다. 60 GHz 레이더 펄스가 수어 사용자에게 도달하면, 반사되는 신호는 Range Doppler Maps(RDMs)와 Moving Target Indication(MTI) 맵으로 처리됩니다. 이는 물체의 위치(range)와 이동 속도(Doppler velocity)를 보여주는 히트맵으로 생각할 수 있습니다.
여기서 제약 조건은 데이터 차원과 계산 과부하입니다. 단일 수어 동작은 1~4초가 소요되며, 최대 66개의 레이더 프레임 시퀀스를 생성합니다. 이 방대하고 고차원적인 비디오와 유사한 시퀀스를 단일 딥러닝 네트워크에 직접 입력하려고 하면, 컴퓨터 메모리가 과부하되고 모델은 과적합(overfitting, 학습 데이터 암기)될 것입니다.
수학적으로 이 문제는 시퀀스 분류(sequence classification) 작업입니다. 우리는 $T$개의 가변적인 프레임으로 구성된 레이더 프레임 시퀀스 $X = \{x_1, x_2, \dots, x_T\}$가 주어졌을 때, 이를 특정 수어 클래스 레이블 $y \in \{1, 2, \dots, 126\}$로 매핑해야 합니다.
메모리 제약을 극복하기 위해 저자들은 문제를 2단계 파이프라인으로 과감하게 분리했습니다.
1단계: 공간 압축 (오토인코더)
전체 시퀀스를 한 번에 처리하는 대신, 사용자 정의 합성곱 신경망(CNN) 오토인코더를 구축하여 각 프레임을 개별적으로 처리했습니다. 인코더 함수 $E$는 방대한 레이더 프레임 $x_t$를 받아 256차원의 밀집된 저차원 벡터 $z_t \in \mathbb{R}^{256}$로 압축합니다. 이 압축된 벡터가 중요한 움직임 데이터를 실제로 포함하도록 보장하기 위해, 디코더 함수 $D$는 원본 프레임을 재구성하려고 시도합니다: $\hat{x}_t = D(z_t)$. 네트워크는 $x_t$와 $\hat{x}_t$ 간의 차이를 최소화하도록 학습됩니다. 학습이 완료되면 디코더는 폐기되고, 레이더 데이터의 간결한 표현을 생성하기 위해 인코더만 유지됩니다.
2단계: 시간 분류 (트랜스포머)
이제 모델은 경량 벡터 시퀀스 $Z = \{z_1, z_2, \dots, z_T\}$를 갖게 됩니다. 수어는 역동적(움직임의 순서가 중요함)이므로, 이 시퀀스를 트랜스포머(Transformer) 네트워크에 입력합니다. 트랜스포머는 다중 헤드 셀프 어텐션(multi-head self-attention)을 사용하여 전체 시퀀스를 살펴보고 어떤 움직임이 어떤 수어와 상관관계가 있는지 파악합니다. 이는 126개의 가능한 의료 수어에 대한 확률 분포 $\hat{y}$를 출력합니다. 모델은 표준 교차 엔트로피 손실(cross-entropy loss)을 사용하여 최적화됩니다:
$$ \mathcal{L} = -\sum_{c=1}^{C} y_c \log(\hat{y}_c) $$
여기서 $C = 126$은 총 클래스 수입니다.
실험 아키텍처 및 "희생양"
저자들은 이 시스템을 구축하고 작동한다고 주장하는 데 그치지 않고, 수학적 주장을 증명하기 위해 고도로 통제된 다중 모드(multimodal) 환경을 설계했습니다. 그들은 레이더, 표준 RGB 카메라, 깊이 센서를 동시에 사용하여 25,830개의 수어 인스턴스로 구성된 방대한 데이터셋을 기록했습니다. 이를 통해 그들의 레이더 모델을 동일한 제스처에 대해 시각 기반 모델과 직접 비교할 수 있었습니다.
이 실험의 "희생양"(기준 모델)은 De Coster 등의 RGB 비디오 트랜스포머 네트워크와 Vahdani의 RGB-D 3D CNN을 포함한 최첨단 시각 모델, 그리고 이전 레이더 기반 제스처 모델(Jhaung, Debnath, Arab)이었습니다.
그들의 성공을 명확하고 부인할 수 없는 증거는 최종 지표에 있습니다. 세 개의 레이더 안테나를 사용하고 RDM 및 MTI 데이터 스트림을 모두 결합했을 때, 그들의 레이더 모델은 놀라운 93.6%의 정확도를 달성했습니다. 이는 선도적인 RGB 기반 모델(88.4%에 불과함)을 완전히 능가했습니다.
이는 매우 중요한 결과입니다. 이는 레이더가 포착한 미세 도플러 서명(micro-Doppler signatures)이 실제 시각 픽셀보다 이 특정 작업에 대해 더 강력하고 구별 가능한 언어적 특징을 포함하고 있음을 증명합니다. 또한, 그들은 애블레이션 연구(ablation studies)를 통해 오토인코더를 트랜스포머 학습 중에 고정하는 것이 과적합을 방지하는 핵심이었으며, 더 단순한 모델이 우수한 일반화를 달성할 수 있도록 했다는 것을 입증했습니다. 이는 신원을 완전히 숨기면서도 1,000달러 상당의 카메라 설정보다 뛰어난 성능을 발휘하는 150달러 상당의 매우 효과적인 보안 시스템을 구매하는 것과 같습니다.
향후 발전을 위한 논의 주제
본 논문에서 제시된 훌륭한 기반을 바탕으로, 향후 탐구 및 비판적 사고를 위한 몇 가지 방향은 다음과 같습니다.
1. 레이더에서의 "비수지적" 단서 딜레마
수어는 단순히 손짓만으로 이루어지지 않습니다. 문법과 톤을 전달하기 위해 표정, 눈썹 올림, 미세한 입술 움직임과 같은 비수지적 단서에 크게 의존합니다. 레이더는 사지의 큰 운동을 추적하는 데 탁월하지만, 얼굴 표정의 미세 근육 변화를 포착할 수 있을까요? 이러한 미세 움직임을 포착하기 위해 레이더 주파수를 높이면, 얼굴을 재구성할 수 있을 만큼 충분한 생체 인식 데이터를 우연히 포착하여 시스템이 보호하려 했던 개인 정보를 파괴할 위험은 없습니까?
2. 고립된 수어에서 연속적인 공동 조음으로의 전환
본 연구는 126개의 고립된 수어에 초점을 맞춥니다. 그러나 자연스러운 인간의 의사소통은 연속적입니다. 유창한 수어에서 한 수어의 끝은 다음 수어의 시작과 물리적으로 혼합됩니다. 이를 공동 조음(co-articulation)이라고 합니다. 트랜스포머 아키텍처는 연속적인 레이더 데이터 스트림을 개별 단어로 분할하기 위해 어떻게 발전해야 할까요? 슬라이딩 윈도우 접근 방식이 충분할까요, 아니면 혼란스러운 병원 환경에서 분할되지 않은 레이더 시퀀스를 처리하기 위해 연결주의 시간 분류(Connectionist Temporal Classification, CTC)와 같은 근본적으로 다른 수학적 프레임워크가 필요할까요?
3. 언어 간 및 대상 간 일반화
이 데이터셋은 단일 대상이 수행한 이탈리아 수어(LIS)를 사용하여 구축되었습니다. 모든 인간은 고유한 운동학적 서명(다른 팔 길이, 다른 수어 속도, 다른 휴식 자세)을 가지고 있습니다. 대상 A에 대해 레이더 모델을 학습시킨다면, 미세 도플러 서명이 대상 B로 일반화될까요? 또한, LIS에 대해 오토인코더가 학습한 잠재 임베딩이 미국 수어(ASL) 또는 영국 수어(BSL)로 이전될 수 있을까요? 새로운 환자에게 실시간으로 레이더 모델을 보정하기 위한 비지도 도메인 적응(unsupervised domain adaptation) 기법을 탐색하는 것이 글로벌 확장성을 위한 중요한 다음 단계가 될 것입니다.